Изобретение относится к области управляющих элементов силовых систем управления и может быть использовано при проектировании рулевых приводов летательных аппаратов или других быстродействующих пневматических приводов.
В системах автоматического управления широко применяются в качестве преобразователей электрических сигналов управления в механическое перемещение исполнительных органов нейтральные электромагниты, в которых направление силы, действующей на якорь, не зависит от знака тока в обмотках управления. Известны нейтральные электромагниты, срабатывание которых с перемещением якоря в одну сторону осуществляется за счет электромагнитной силы, возникающей в рабочем зазоре при включении обмотки управления [1], а в обратную сторону перемещение якоря происходит под действием механической пружины после выключения обмотки управления. Так как в процессе работы указанных электромагнитов электромагнитная сила и сила от пружины всегда действуют на якорь с противоположными знаками, времена срабатывания и отпускания электромагнитов существенны (десятки миллисекунд). Поэтому для применения таких электромагнитов в быстродействующих системах автоматического управления необходимо повышать их быстродействие. Одним из способов повышения быстродействия таких электромагнитов является уменьшение рабочего хода якоря при существенном повышении потребляемой им мощности. При этом увеличиваются размеры магнитопровода для обеспечения прохождения увеличенных магнитных потоков, что не всегда приемлемо. Так, например, в малогабаритных системах управления летательных аппаратов вопросы электропотребления и габаритов являются очень острыми.
Известен способ повышения быстродействия релейного электромагнита [2], при котором его срабатывание в одну и другую сторону осуществляют электромагнитными силами, при этом воздействуют на якорь при его движении моментом механической пружины, способствующим его перемещению от упоров в среднему (нулевому) положению и противодействующим при дальнейшем движении якоря к упорам, а в момент прохождения якорем пути, равного ~3/4 рабочего хода, обеспечивают намагничивающей силой индукцию в магнитопроводе такой величины, при которой магнитная проницаемость его материала будет максимальной.
Указанный способ, принятый авторами за прототип, реализован в конструкциях управляющих нейтральных электромагнитов [2]. Рассматриваемые электромагниты содержат в корпусе два статора с обмотками управления и расположенный между ними на оси поворотный якорь в виде пластины. К оси якоря жестко закреплена своей средней частью плоская пружина с линейной характеристикой с моментом на упоре Мп. Оба конца пружины защемлены с технологическим зазором между двумя ограничителями, расположенными со стороны каждой плоскости пружины.
При обесточенных обмотках якорь находится в нулевом (среднем) положении, что соответствует половине рабочего хода электромагнита.
Электромагнит работает следующим образом. При подаче электропитания на аппаратуру управления ток начинает проходить через одну из обмоток и якорь притягивается к соответствующему упору, преодолевая момент пружины, средняя часть которой закручивается относительно защемленных концов пружины. Основной режим работы электромагнитов - по упорам. При переключении управляющим сигналом обмоток ток в удерживающей обмотке падает, удерживающий электромагнитный момент также падает и при достижении уровня, развиваемого пружиной на упоре, происходит страгивание якоря. Под действием суммарного момента пружины и момента, развиваемого включенной обмоткой, якорь перемещается в сторону другого упора. После прохождения нулевого положения якорь под действием момента во включенной обмотке, преодолевая момент закручивающейся в другую сторону пружины, приходит к другому упору. При смене полярности управляющего сигнала процесс срабатывания электромагнита повторяется в противоположную сторону. Так как установка указанным образом пружины с жесткостью С повышает собственную частоту механической части электромагнита
где J - суммарный момент инерции якоря и нагрузки (например, заслонки или струйника) повышается быстродействие электромагнита (уменьшается время движения якоря с упора на упор). Кроме того, существенно уменьшается время трогания электромагнита, т. к. под действием момента пружины на упоре, стремящегося оторвать якорь, трогание якоря происходит быстрее, не дожидаясь, пока удерживающий момент упадет до нулевого значения.
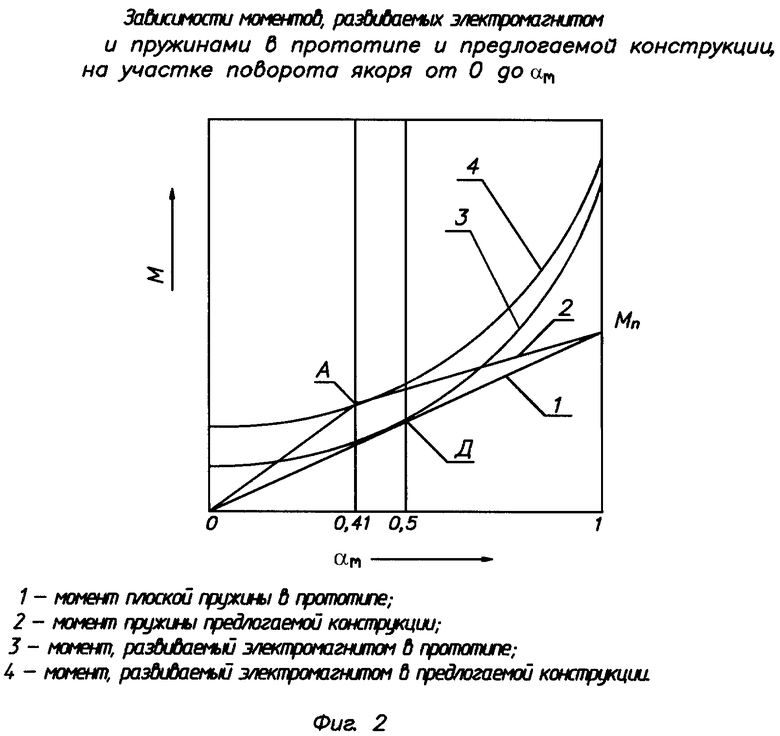
Таким образом, жесткость пружины фактически определяет динамику нейтрального электромагнита. При этом для его нормальной работы электромагнитный момент на всем участке движения якоря от среднего положения к упору должен превышать момент пружины, который противодействует перемещению якоря к упору. В противном случае возможно несрабатывание электромагнита и остановка якоря в промежуточном положении между нулевым и упором. Статическая характеристика пружины (зависимость момента от угла отклонения якоря) имеет линейный характер, а электромагнитного момента - экспоненциальный (фиг.1). Критическая точка их сближения по модулю лежит в области угла отклонения якоря α = 0,5αm (фиг.1, точка Д), где αm - максимальный угол отклонения якоря от среднего положения на упор. Поэтому в прототипе развиваемый электромагнитом момент в критической точке имеет максимально возможное значение при располагаемой намагничивающей силе. Для выполнения указанного условия необходимо иметь минимальное магнитное сопротивление магнитопровода, т.е. материал должен быть ненасыщен. С этой целью в прототипе при α = 0,5αm обеспечивают насыщение магнитопровода до индукции, при которой его материал имеет максимальную магнитную проницаемость. Для широко применяемых в электромагнитах электротехнических сталей максимальная проницаемость обеспечивается при индукции в магнитопроводе В=0,9...1,0 Тл [3].
При подходе якоря к упору вследствие уменьшения воздушного рабочего зазора индукция в магнитопроводе возрастает, что приводит к его насыщению. Увеличивается и магнитный момент, который существенно превышает момент пружины на упоре. При этом магнитный момент на упоре, хотя и снижен по сравнению с моментом, который имел бы место при ненасыщенной магнитной системе, его величины достаточно для работы электромагнита без отскока якоря.
Рассмотренный способ повышения быстродействия электромагнита имеет недостаток, который не позволяет при необходимости увеличить быстродействие электромагнита без увеличения его габаритов. Так, для повышения быстродействия электромагнита необходимо, как следует из вышесказанного, повысить жесткость пружины, что приводит к пропорциональному увеличению ее моментов как в критической точке, так и на упоре. Поэтому для функционирования электромагнита необходимо также увеличить за счет увеличения намагничивающей силы электромагнитный момент в критической точке до значения, превышающего в этой точке момент пружины. При этом ввиду более глубокого насыщения материала магнитопровода (из-за увеличения намагничивающей силы) увеличение момента на упоре происходит в небольших пределах. Так, например, двухкратное повышение намагничивающей силы приводит к увеличению момента на упоре всего на 15-20%. В результате при увеличенном моменте пружины на упоре электромагнит начинает работать с недопустимыми отскоками якоря, т.е. требуется увеличить сечение магнитопровода.
Задачей предлагаемого изобретения является повышение быстродействия электромагнита при обеспечении его работы без отскоков якоря, а также при упрощении его конструкции и при сохранении габаритов его магнитопровода. Для достижения поставленной задачи в предлагаемом авторами способе повышения быстродействия электромагнитов, осуществляя перемещение якоря в обе стороны электромагнитными моментами и одновременно воздействуя на якорь при его движении с упоров в среднее положение моментом пружины, действующим в сторону движения якоря, а при движении якоря из среднего положения к упорам - моментом пружины, действующим в противоположную сторону, а также при движении якоря, обеспечивая намагничивающей силой насыщение магнитопровода до индукции максимальной магнитной проницаемости его материала, на участке движения якоря, определяемом углами минус αп и αп, воздействуют моментом пружины с жесткостью, в два раза превышающей жесткость пружины, действующей на остальном пути движения якоря, при углах его отклонения α = αп - при движении в сторону положительных углов отклонения от среднего положения и α = -αп - при движении в сторону отрицательных углов, дополнительно намагничивающей силой обеспечивают такое насыщение магнитопровода, при котором индукция в нем превышает индукцию максимальной магнитной проницаемости материала магнитопровода электромагнита не менее чем на 10%.
Для осуществления предлагаемого способа авторами разработан нейтральный электромагнит, содержащий установленные в корпусе два статора с обмотками управления, поворотный якорь в виде пластины, расположенный на оси между статорами, плоскую пружину с линейной статической характеристикой и моментом Мп на упоре, закрепленную средней частью на оси якоря, ограничители по концам пружины, в котором ограничители в виде винтов установлены только со стороны одной из плоскостей пружины, а каждый конец пружины предварительно поджат своим ограничительным винтом на угол поворота якоря
При этом плоская пружина имеет жесткость
а намагничивающая сила электромагнита при прохождении якорем углов α = αп - при его движении в сторону положительных углов отклонения якоря от среднего положения и α = -αп - при движении в сторону отрицательных углов имеет значение, при котором индукция в магнитопроводе превышает индукцию максимальной магнитной проницаемости материала магнитопровода не менее чем на 10%, где αm - максимальный угол поворота якоря от среднего положения.
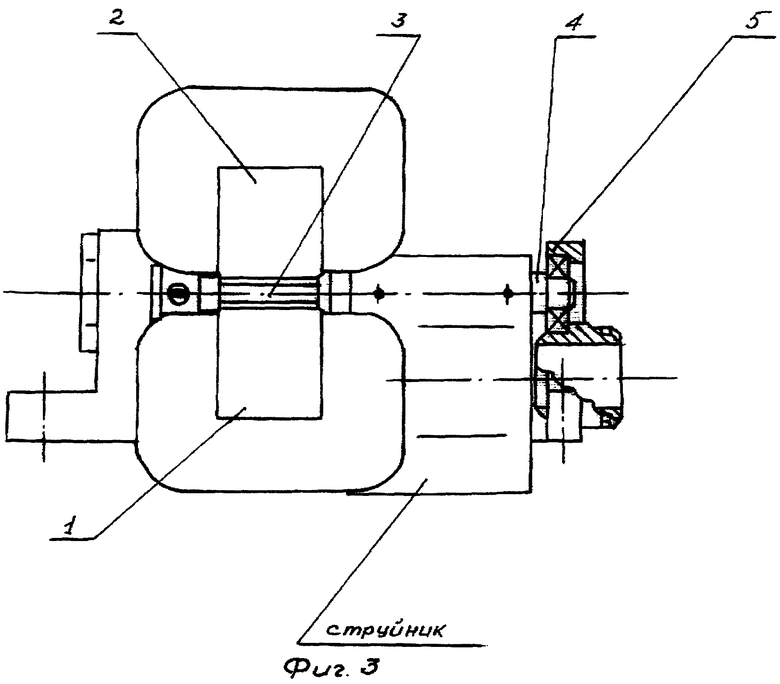
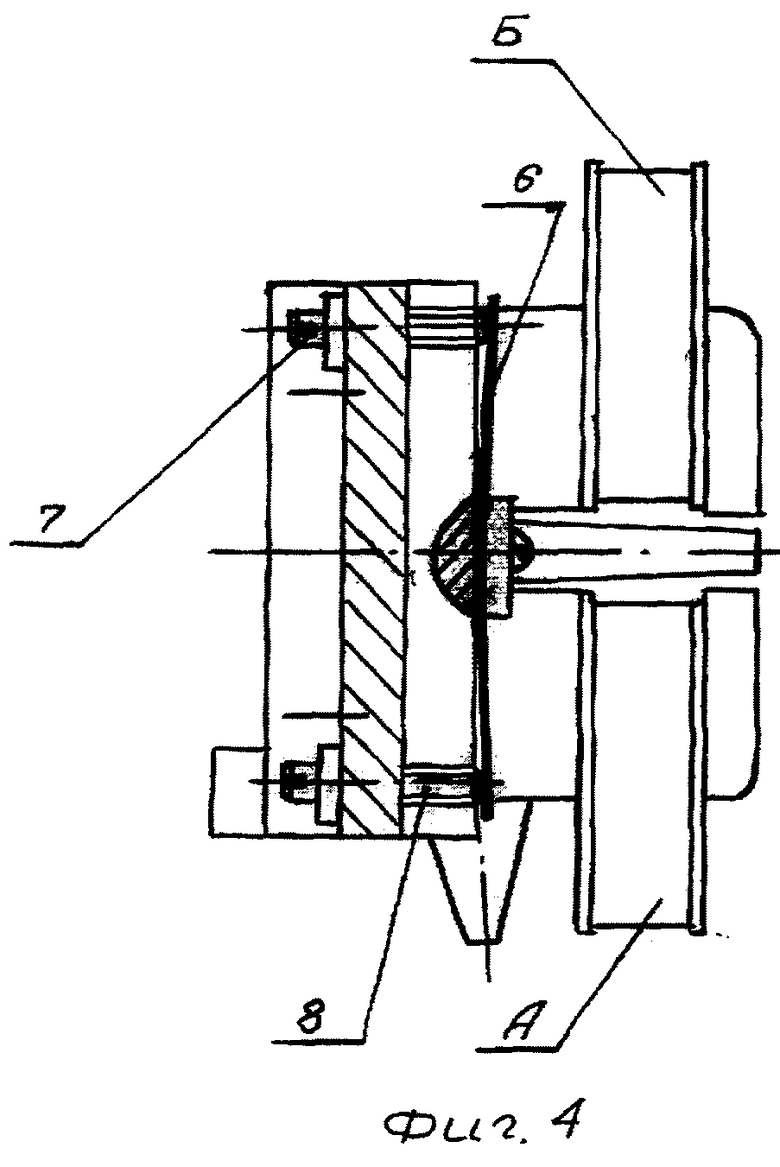
На фиг. 3, 4 изображена конструктивная схема предлагаемого электромагнита. Электромагнит состоит из двух статоров 1 и 2 с обмотками А и Б, обеспечивающими требуемую намагничивающую силу. Якорь 3 закреплен на оси 4, установленной на подшипниках в корпусе 5, и имеет возможность отклоняться в обе стороны из среднего положения на угол αm. На оси якоря закреплена плоская пружина 6 с жесткостью С. Каждый свободный конец пружины имеет предварительное поджатие на угол  который устанавливается при помощи ограничительных винтов 7 и 8.
который устанавливается при помощи ограничительных винтов 7 и 8.
Электромагнит функционирует следующим образом. Рассмотрим основной режим работы - по упорам. В исходном положении якорь находится на одном из упоров, например притянут к статору 2. При подаче управляющего сигнала в обмотку А статора 1 одновременно отключается обмотка Б. Удерживающий якорь на упоре (момент от обмотки Б) начинает падать и при достижении величины, равной моменту пружины Мп, происходит трогание якоря. Под действием суммарного момента от пружины и развиваемого обмоткой А якорь перемещается в ее сторону. При этом момент пружины, который воздействует на участке углов отклонения якоря от минус αm до минус αп и существенно превышает момент, развиваемый обмоткой А, создается за счет поджатия конца пружины винтом 7. Другой конец пружины в это время находится в свободном состоянии, винта 8 не касается и в создании момента пружины не принимает участия, т.е. на рассмотренном участке движения пружина работает с жесткостью С. При достижении якорем угла отклонения минус αп и далее второй конец пружины, начиная опираться на винт 8, вступает в работу, в результате чего на участке движения от минус αп до αп пружина работает с удвоенной жесткостью, равной 2С (фиг.2). После прохождения якорем нулевого положения момент пружины начинает противодействовать движению якоря, но под действием увеличенного момента обмотки А (вследствие уменьшения воздушного зазора), уже превосходящего момент пружины, якорь приходит на упор. При этом при достижении угла αп конец пружины со стороны винта 7 выходит из зацепления с ним и до конца движения на якорь действует момент пружины с жесткостью С. В результате статическая характеристика пружины в предлагаемой конструкции электромагнита имеет выпуклый характер, что увеличивает по сравнению с прототипом величину средней жесткости пружины при обеспечении ее момента на упоре, равного моменту в прототипе. В итоге уменьшается время движения якоря без его отскока при достижении упора.
Очевидно, что максимальный эффект по повышению быстродействия электромагнита достигается при максимально возможной величине средней жесткости пружины, которая пропорциональна площади под кривой ее статической характеристики (фиг.2). Учитывая, что в предлагаемом изобретении изменение жесткости пружины в процессе работы электромагнита фиксировано (в 2 раза), а величина максимального момента пружины на упоре ограничена значением момента в прототипе Мп максимальную величину средней жесткости можно получить только за счет выбора оптимального значения величины угла предварительного пожатия αп.
Находя экстремум для выражения средней жесткости пружины
получим, что средняя жесткость пружины достигает максимального значения при
Критическая точка в предлагаемом электромагните находится в месте перегиба статической характеристики пружины, где жесткость ее изменяется в два раза (точка А), т.е. при угле предварительного поджатия. Из фиг.2 получаем, что момент пружины в точке А составляет 0,58 Мп, что в 1,16 раза больше момента пружины в прототипе в его критической точке Д. Значит, и развиваемый момент в критической точке должен быть не менее чем в 1,16 раза больше, чем в прототипе.
В соответствии с теорией электромагнитного поля электромагнитный момент рассматриваемых электромагнитов можно определить по зависимости
[3, стр.186], где К - постоянный коэффициент, зависящий от используемой системы единиц, (iW0) - намагничивающая сила в рабочем зазоре, G0 - магнитная проводимость рабочего воздушного зазора. Для рассматриваемой конструкции электромагнитов
где M0 - магнитная проницаемость пустоты, S0 - площадь полюса, lя - плечо якоря, αi - угол отклонения якоря от нулевого положения.
Известно, что
где Ф0 - магнитный поток. Тогда окончательно можно записать:
Используя полученное выше соотношение для моментов в критической точке А заявляемого электромагнита и в критической точке Д прототипа, равное 1,16, и учитывая равенство размеров электромагнитов, получаем, что магнитный поток в точке А должен быть больше, чем в точке Д, не менее чем в 
Так как индукция в магнитопроводе пропорциональна магнитному потоку, то для обеспечения, нормального функционирования заявляемого электромагнита индукция в материале его магнитопровода при отклонении якоря на угол α = αп (точка А) должны быть не менее чем на 8...10% больше, чем в прототипе при α = 0,5αm (точка Д). Учитывая, что в прототипе при α = 0,5αm индукция магнитопровода соответствует максимальной магнитной проницаемости его материала, условием нормального функционирования заявляемого электромагнита является требование обеспечения такой намагничивающей силы, при которой при прохождении якорем угла α = αп индукция магнитопровода должна превышать индукцию максимальной проницаемости его материала не менее чем на 10%.
Источники информации
1. Витенберг М.И. "Расчет электромагнитных реле", ГОСЭНЕРГОИЗДАТ, 1962 г., стр.19...45, аналог.
2. Прошин В.М., Заславский А.А. "К динамике электромеханического преобразователя пневматического сервомеханизма", в сб. "Пневматические приводы и системы управления", М., "Наука", 1971 г., стр.183, рис.1, прототип.
3. А.В. Гордон и А.Г. Сливинская "Электромагниты постоянного тока", ГОСЭНЕРГОИЗДАТ, М.Л. 1960 г., стр.186.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЕЙ | 1994 |
|
RU2074438C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ЭЛЕКТРОМАГНИТНЫЙ НАСОС | 2010 |
|
RU2424447C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1997 |
|
RU2154218C2 |
| ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2283472C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ДВУХПОЗИЦИОННЫЙ ЭЛЕКТРОМАГНИТ С ПОВОРОТНЫМ ЯКОРЕМ | 2003 |
|
RU2261495C1 |
| СИЛОВОЙ ЭЛЕКТРОМАГНИТ ИМПУЛЬСНОГО НЕВЗРЫВНОГО СЕЙСМОИСТОЧНИКА | 2000 |
|
RU2172497C1 |
| СПОСОБ СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ БЫСТРОДЕЙСТВУЮЩЕГО РАСПРЕДЕЛИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2329412C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006144C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2572040C1 |
Изобретение относится к области управляющих элементов, в частности к рулевым приводам летательных аппаратов. Техническим результатом является повышение быстродействия нейтральных электромагнитов, обеспечение их работы без отскоков якоря и сохранение габаритов магнитной системы. Технический результат достигается тем, что на участке движения якоря, определяемом углами -αп и αп, воздействуют моментом пружины с жесткостью, в два раза превышающей жесткость пружины, действующей на остальном пути движения якоря при углах его отклонения от среднего положения. Дополнительно обеспечивают намагничивающей силой насыщение магнитопровода. Индукция в нем превышает индукцию максимальной магнитной проницаемости материала магнитопровода электромагнита не менее чем на 10%. Нейтральный электромагнит содержит установленные в корпусе два статора с обмотками управления, поворотный якорь в виде пластины, расположенный на оси, плоскую пружину с линейной статической характеристикой, закрепленную средней частью на оси якоря, и ограничители по концам пружины в виде винтов, установленных со стороны одной из плоскостей пружины. Каждый конец пружины предварительно поджат винтом на угол  Плоская пружина выполнена с жесткостью
Плоская пружина выполнена с жесткостью  2 с.п. ф-лы, 4 ил.
2 с.п. ф-лы, 4 ил.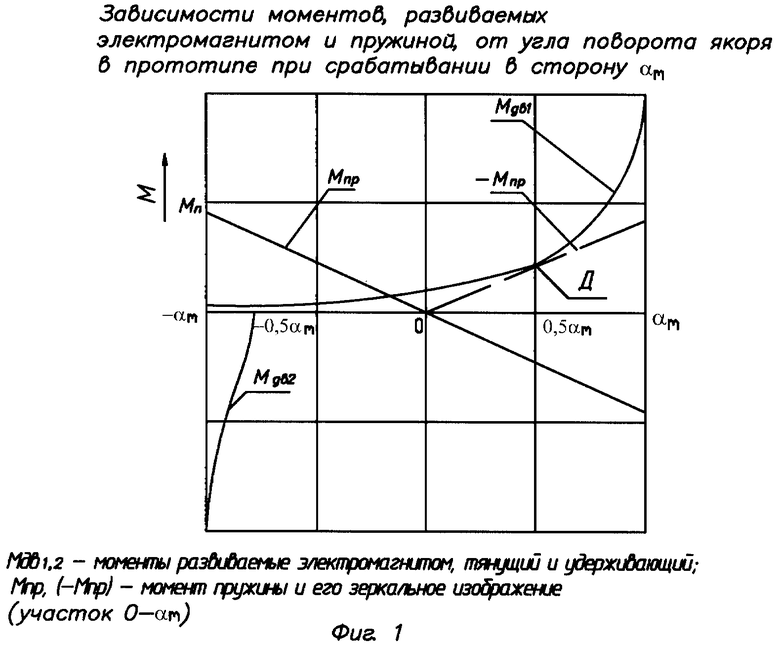
 , плоская пружина имеет жесткость
, плоская пружина имеет жесткость  а намагничивающая сила электромагнита при прохождении якорем углов α=αп при его движении в сторону положительных углов отклонения якоря от среднего положения и α=-αп при движении в сторону отрицательных углов имеет значение, при котором индукция в магнитопроводе превышает индукцию максимальной магнитной проницаемости материала магнитопровода не менее чем на 10%, где αm - максимальный угол поворота якоря от среднего положения.
а намагничивающая сила электромагнита при прохождении якорем углов α=αп при его движении в сторону положительных углов отклонения якоря от среднего положения и α=-αп при движении в сторону отрицательных углов имеет значение, при котором индукция в магнитопроводе превышает индукцию максимальной магнитной проницаемости материала магнитопровода не менее чем на 10%, где αm - максимальный угол поворота якоря от среднего положения.
| ПРОШИН В.М., ЗАСЛАВСКИЙ А.А | |||
| К динамике электромеханического преобразователя пневматического сервомеханизма | |||
| В сб | |||
| "Пневматические приводы и системы управления" | |||
| - М.: Наука, 1971, с.183, рис.1 | |||
| Трехпозиционный электромагнитный привод | 1977 |
|
SU635533A1 |
| ЭЛЕКТРОМАГНИТ | 0 |
|
SU212364A1 |
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 1995 |
|
RU2082248C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРИФТОРИДА МОЛИБДЕНА | 0 |
|
SU263581A1 |

