Изобретение относится к системам управления летательных аппаратов и наиболее целесообразно может быть использовано в электромагнитных приводах ПТУРС и малогабаритных ракет, а также в электромагнитных приводах с исполнительными механизмами поворотного типа.
В малогабаритных управляемых ракетах (УР) традиционно применяются блоки рулевых пневмоприводов, работающие от порохового или воздушного аккумуляторов давления (ПАД, ВАБ) или от набегающего на ракету потока воздуха (Патент RU 2119599 C1, 22.09.1995, МПК F 15 В 15/00, 15/12, 15/14. Патент RU 2224142 C1, 26.02.2002, МПК 7 F 15 В 15/14). Однако применение указанных приводов в простейших УР становится экономически нецелесообразным ввиду сравнительно сложной их конструкции, состоящей из нескольких функциональных блоков - газового силового двигателя, управляющего электромагнита с распределительным устройством, источника рабочего тела (ПАД, ВАБ). Особенно нецелесообразность применения указанного выше привода проявляется при больших объемах изготовления изделий, например ПТУРС. Поэтому в простейших ракетах разработчик стремится применить более простые блоки электромагнитных рулевых приводов, в которых в качестве силового привода используются нейтральные электромагниты.
Известен электромагнитный блок привода рулей, используемый в ПТУРСах 9МIII и 9МIII-2(аналог) (Снаряд 9МIII (9МII-2). Техническое описание и инструкция по эксплуатации (9МIII.00.00.000 ТОЭ), М., "Военное издательство министерства обороны СССР", 1975, с.13, 14).
Блок рулевого привода (БРП) включает два идентичных канала, каждый из которых выполнен на нейтральных электромагнитах поворотного типа, состоящих из двух сердечников с обмотками управления и якоря с жестко закрепленными на его оси рулями, расположенного между полюсами сердечников.
Каждый канал БРП функционирует следующим образом. При подаче управляющего тока в одну из обмоток сердечника якорь притягивается к полюсам сердечника указанной обмотки, разворачиваясь на максимальный угол поворота. При этом рули, жестко связанные с якорем, поворачиваются на тот же угол. При подаче тока в другую обмотку якорь с рулем разворачивается в противоположную сторону.
Рассмотренная конструкция БРП проста, обеспечивает требуемые характеристики, но имеет технологический недостаток. Основные элементы привода - якорь и сердечник имеют сложную форму и не технологичны, т.к. изготавливаются путем фрезерования с последующей шлифовкой рабочих поверхностей.
Известны электромагнитные приводы исполнительных механизмов, выполненные на более технологичных втяжных электромагнитах, в которых магнитопровод с полюсом и якорем выполнены точечными. Так, например, известен арматурный электромагнитный привод, который состоит из магнитопровода с полюсом, выполненным из точеных деталей 7 и 4, точеного сердечника 3, являющегося якорем втяжного электромагнита. Якорь перемещается по разделительной трубке 2, расположенной внутри катушки 6 (Шучинский С.X. Электромагнитные приводы исполнительных механизмов. М.: Энергоатомиздат, 1984, с.41, рис.12а). Однако применить его в качестве привода рулей УР не представляется возможным ввиду низкого быстродействия, вызванного тем, что срабатывание привода в одну сторону происходит под действием электромагнитной силы, возбуждаемой при подаче напряжений в катушке, а в другую сторону - под действием только пружины 10.
Наиболее близким по составу к заявляемому является блочный реверсивный арматурный электромагнитный привод, принятый авторами за прототип (Шучинский С.Х. Электромагнитные приводы исполнительных механизмов. М.: Энергоатомиздат, 1984, с.34, рис.10). Привод состоит из двух полюсов 3 и 12 втяжных электромагнитов, между которыми расположен сердечник 4, перемещающийся, как и в предыдущем образце, в разделительной трубке и являющийся деталью, совмещающей два якоря. Трубка установлена внутри катушек 2 и 13. В сердечнике 4 размещен шток 5, являющийся тягой, для передачи поступательного перемещения якорей исполнительному механизму.
В прототипе в силу его условий работы разделяющая трубка служит также для герметизации внутренних деталей электромагнитного привода от потока рабочей среды. В случае ненадобности герметизации деталей привода разделительная трубка в нем отсутствует и направляющей для перемещений якоря обычно служит стенка каркаса обмотки (Гордон А.В. и Сливинская А.Т. Электромагниты постоянного тока. М.,-Л.: Госэнергоиздат, 1960, с.258, рис.7-16. Любчик М.А. Силовые электромагниты аппаратов и устройств автоматики постоянного тока. М.: Энергия, 1968, с.71, рис.2-7а.).
В отличие от аналога, в котором имеются два идентичных воздушных рабочих зазора, изменяющихся при перемещении якоря в процессе работы привода, втяжной электромагнит имеет один рабочий зазор и один технологический, который необходим для перемещения якоря 4 и остается постоянным по величине при работе привода. Технологический зазор, служащий для замыкания магнитного потока, является "паразитным" т.к. на нем падает часть намагниченной силы при прохождении магнитного потока.
Для уменьшения в нем потерь намагничивающей силы величину зазора выполняют минимально возможной. В прототипе величина технологического зазора (зазор между деталями поз.1 и 4) определяется толщиной стенки разделительной трубки.
Функционирует электромагнитный привод следующим образом. При подаче управляющего напряжения в левую катушку в ней возбуждается магнитный поток, который в рабочем зазоре между соответствующим якорем и полюсом 3 создает усилие

где Sя - эквивалентная площадь полюса,
В - индукция в рабочем зазоре,
Фо - магнитный поток, проходящий в рабочем зазоре (Гордон А.В. и Сливинская А.Т. Электромагниты постоянного тока. М.,-Л.: Госэнергоиздат, 1960, с.182, формулы 4-3б).
Под действием силы Fя якорь притягивается к полюсу 3, перемещая шток исполнительного механизма. При подаче управляющего напряжения в правую катушку одновременно снимается сигнал с ранее возбужденной катушки. При этом якорь притягивается к полюсу 12, перемещая шток в другую сторону.
У перечисленных приводов на втяжных электромагнитах, включая и прототип, якорь при функционировании совершает поступательное перемещение, и применять их в качестве электромагнитного привода рулей ракеты возможно путем использования дополнительного устройства, позволяющего поступательное перемещение якоря преобразовать в угловое отклонение рулей. Примером такого устройства может служить механизм передачи (МП) в виде кинематического звена, соединяющего при помощи двух шарниров шток поршня газового двигателя (ГД) с кулисой руля, отклоняющегося при поступательном перемещении поршня на угол δ (Костин МС.В., Петров Б.И., Гамынин И.С. Рулевые приводы. М.: Машиностроение, 1973, с.103, рис.2.7). Однако применение указанного кинематического звена в электромагнитных приводах простейших ракет усложняет конструкцию привода, требует дополнительных габаритов, увеличивает инерционную нагрузку на привод, что отрицательно сказывается на его быстродействии.
Задачей предлагаемого изобретения является разработка электромагнитного блока рулевого привода управляемой ракеты на втяжных электромагнитах при упрощении конструкции привода и обеспечении минимальной инерционной нагрузки на него.
Для решения указанной задачи предложен электромагнитный блок рулевого привода управляемой ракеты, содержащий два втяжных электромагнита, которые состоят из магнитопроводов с полюсами, катушек с обмотками управления, выполненными на каркасе, и якорей, которые связаны друг с другом и соединены с исполнительным механизмом. Новым по сравнению с прототипом является то, что каждый якорь имеет тягу, которая проходит через отверстие в полюсе магнитопровода, а связь якорей друг с другом осуществлена кинематически за счет шарнирного соединения тяги каждого якоря с кулисой, жестко закрепленной на оси руля. Якоря установлены внутри расположенных в зоне технологического зазора колец из немагнитного материала с зазором, который позволяет якорям прокачиваться при их продольном перемещении для обеспечения максимального угла отклонения рулей привода при его функционировании. При этом величины зазоров между якорем и кольцом, между тягой и стенками отверстия в полюсе, а также между якорем и каркасом обмотки должны удовлетворять условию
 ,
,
где Δi - величина рассматриваемого зазора;
К - коэффициент запаса;
Lo - расстояние от центра вращения кулисы до центра шарнира;
δm - максимальный угол поворота руля;
Аi - расстояние от немагнитного кольца до места в рассматриваемом зазоре, максимально удаленном от указанного кольца;
В - расстояние от немагнитного кольца до центра шарнира в кулисе при нулевом (среднем) положении руля.
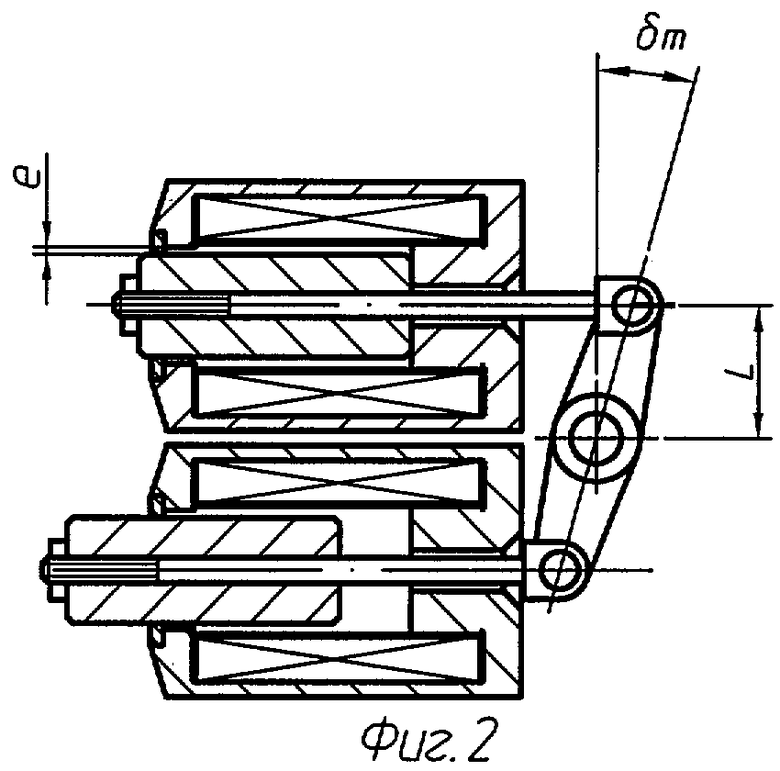
На фиг.1 представлена конструктивная схема электромагнитного рулевого привода при среднем положении рулей. Привод включает два идентичных электромагнита, каждый из которых состоит из магнитопровода 1 с полюсом 2. Внутри магнитопровода расположена катушка с обмоткой 3, выполненная на каркасе 4. Якорь 5 установлен внутри кольца 6 с зазором, позволяющим якорю прокачиваться при его продольном перемещении. Кольцо 6 выполнено из немагнитного материала и запрессовано в магнитопроводе 1 в зоне технологического зазора. Якорь при помощи тяги 7, установленной в нем на резьбе, соединен шарниром 8 с кулисой 9. В центральной части кулисы 9 закреплена ось 10 рулей 11. Тяга 7 проходит через отверстие в полюсе 2.
На фиг.2 представлена конструктивная схема привода при максимальном угле отклонения рулей δm. На ней указаны величина «е» технологического зазора между якорем и магнитопроводом, а также расстояние от геометрической оси якоря, проходящей через центр шарнира, до центра оси кулисы L, равное L0·cosδm.
Предложенная конструкция позволила применить для управляемой ракеты технологичный электромагнитный привод на втяжных электромагнитах без дополнительного кинематического звена, что упростило его конструкцию и уменьшило инерционную нагрузку на привод. При этом вследствие исключения дополнительного кинематического звена якорь в процессе функционирования привода кроме продольного перемещения совершает угловые колебания (в разработанном образце ±0°51). Поэтому величина зазора в месте посадки якоря в кольце при выбранной ширине кольца устанавливается такой, чтобы исключить заклинивание при угловых колебаниях якоря. Кроме того, величины зазоров между якорей и каркасом катушки, тягой и стенками отверстия в полюсе также должны гарантировать отсутствие заедания и заклинивания указанных деталей при прокачке якоря в процессе функционирования. При этом все перечисленные гарантированные зазоры необходимо выбирать минимальными, что объясняется следующим обстоятельством.
Увеличение зазора в месте посадки якоря приводит к увеличению технологического зазора, а значит и к увеличению потерь намагничивающей силы в технологическом зазоре и уменьшению полезного усилия.
Увеличение диаметра отверстий в полюсе уменьшает площадь полюса, а значит и рабочий магнитный поток, что также уменьшает полезное усилие.
Увеличение зазора между якорем и стенкой каркаса уменьшает площадь окна под обмотку, т.е. уменьшает количество витков, а значит и намагничивающую силу.
Конечно, перечисленные ограничения по указанным зазорам при использовании электромагнитного привода в стационарных условиях несущественны, т.к. могут быть скомпенсированы увеличением габаритов обмотки и магнитной системы. Но в летательных аппаратах всегда очень остро стоит вопрос по миниатюризации всех узлов бортовой системы управления, и перечисленные ограничения несомненно актуальны.
Наибольшая величина прокачки деталей привода происходит в месте соединения тяги и кулисы, т.е. в шарнире, который максимально удален от немагнитного кольца 6. Величина ее определяется зависимостью

Величины же перечисленных выше зазоров в местах их максимального удаления от кольца 6 будут пропорциональны расстоянию от кольца 6 до места их расположения Аi, т.е.

где В - расстояние от кольца 6 до центра шарнира при нулевом (среднем) положении рулей, т.е. δ=0.
Таким образом, предложенное решение позволило разработать для управляемой ракеты простой электромагнитный рулевой привод на втяжных электромагнитах без применения дополнительного кинематического звена для преобразования поступательного движения якоря в угловое перемещение рулей при минимальных габаритах привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ РУЛЕВОГО ПРИВОДА ЛЕТАТЕЛЬНОГО АППАРАТА И ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2291383C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2309084C1 |
| Отсек рулевого привода управляемой ракеты | 2020 |
|
RU2743420C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2370727C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2237857C2 |
| ЭЛЕКТРОМАГНИТ | 2008 |
|
RU2366018C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159984C1 |
| СПОСОБ СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ БЫСТРОДЕЙСТВУЮЩЕГО РАСПРЕДЕЛИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2329412C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ МАКСИМАЛЬНЫЙ РАСЦЕПИТЕЛЬ | 1993 |
|
RU2039389C1 |
Изобретение относится к области вооружения. Электромагнитный блок рулевого привода управляемой ракеты содержит два втяжных электромагнита, состоящих из магнитопроводов с полюсами, катушек, обмотки управления которых выполнены на каркасе, и якорей, связанных друг с другом и соединенных с исполнительным механизмом. Каждый якорь имеет тягу, проходящую через отверстие в полюсе магнитопровода. Якоря связаны друг с другом кинематически за счет шарнирного соединения тяги каждого якоря с кулисой, жестко закрепленной на оси руля, и установлены внутри расположенных в зоне технологического зазора колец из немагнитного материала с зазором, позволяющим якорям прокачиваться при их продольном перемещении для обеспечения максимального угла отклонения рулей при функционировании привода. Величины зазоров между якорем и кольцом, между тягой и стенками отверстия в полюсе, а также между якорем и каркасом обмотки должны удовлетворять определенному условию. При использовании изобретения упрощается конструкция привода и обеспечивается минимальная инерционная нагрузка на него. 2 ил.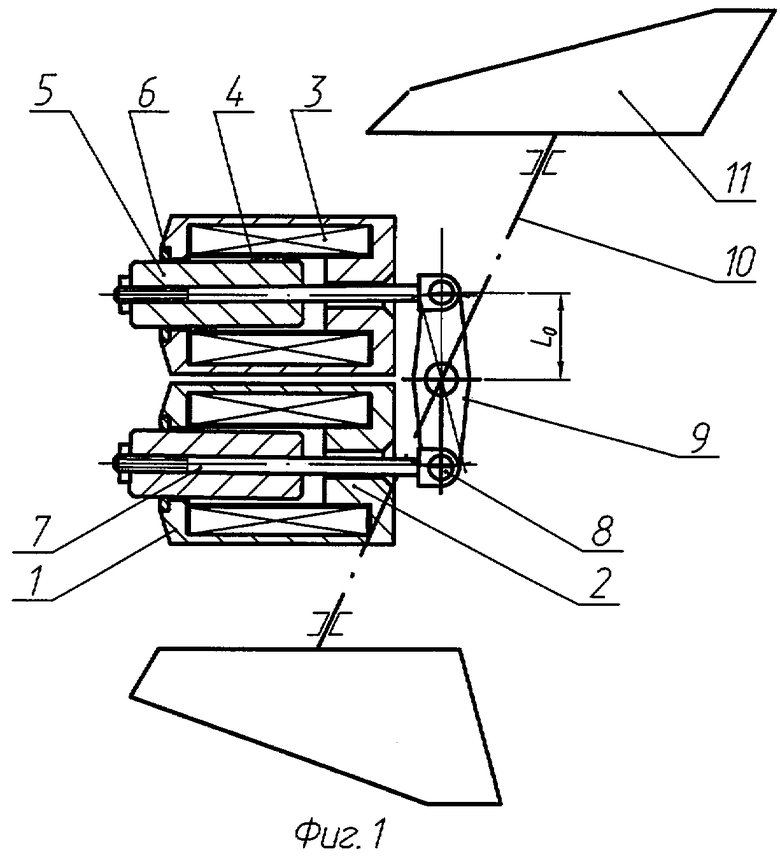
Электромагнитный блок рулевого привода управляемой ракеты, содержащий два втяжных электромагнита, состоящих из магнитопроводов с полюсами, катушек, обмотки управления которых выполнены на каркасе, и якорей, связанных друг с другом и соединенных с исполнительным механизмом, отличающийся тем, что каждый якорь имеет тягу, проходящую через отверстие в полюсе магнитопровода, при этом якоря связаны друг с другом кинематически за счет шарнирного соединения тяги каждого якоря с кулисой, жестко закрепленной на оси руля, и установлены внутри расположенных в зоне технологического зазора колец из немагнитного материала с зазором, позволяющие якорям прокачиваться при их продольном перемещении для обеспечения максимального угла отклонения рулей при функционировании привода, причем величины зазоров между якорем и кольцом, между тягой и стенками отверстия в полюсе, а также между якорем и каркасом обмотки должны удовлетворять условию:
 ,
,
где Δi- величина рассматриваемого зазора;
К - коэффициент запаса;
L0 - расстояние от центра вращения кулисы до центра шарнира;
δm - максимальный угол поворота;
Аi - расстояние от немагнитного кольца до места в рассматриваемом зазоре, максимально удаленном от указанного кольца;
В - расстояние от немагнитного кольца до центра шарнира в кулисе при нулевом (среднем) положении руля.
| ЩУЧИНСКИЙ С.Х | |||
| Электромагнитные приводы исполнительных механизмов | |||
| - М.: Энергоатомиздат, 1984, с.34, рис.10 | |||
| Пневмодвигатель двухстороннего действия | 2002 |
|
RU2224142C2 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
| КАНАТНЫЙ СТАВ ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU184704A1 |
| Опорный узел прокатного валка | 1987 |
|
SU1443998A1 |

