Изобретение относится к деталям машин и может быть использовано в составе электроприводов систем автоматики изделий авиационной и космической техники.
Известен электропривод, содержащий корпус с установленными в нем электродвигателем, редуктором из n (n=1, 2,...) блоков зубчатых колес и выходным валом [1] . Недостатком этого электропривода является его незащищенность от перегрузки выходного вала по моменту.
Этого недостатка лишен электропривод, содержащий корпус, установленные в нем электродвигатель, редуктор из n (n=1, 2,...) блоков зубчатых колес и выходной вал, а также основной гистерезисный тормоз и вал на подшипниках, установленный в корпусе основного гистерезисного тормоза, выбранный в качестве прототипа [2]. На корпусе основного гистерезисного тормоза жестко установлено зубчатое колесо, а на вале основного гистерезисного тормоза - шестерня, при этом основной гистерезисный тормоз размещен в кинематической цепи между электродвигателем и выходным валом.
Недостатком такого электропривода является незначительный, отличающийся от экземпляра к экземпляру электропривода и непостоянный во времени момент удержания выходного вала при отсутствии электропитания на электродвигателе. Для позиционных электроприводов агрегатов систем автоматики жидкостных реактивных двигателей (ЖРД) изделий авиационной и космической техники (используемых, например, для привода дросселей в магистралях подачи компонентов топлива для приведения указанных дросселей в положения, обеспечивающие заданное соотношение компонентов в соответствии с циклограммой изменения тяги ЖРД) это является недопустимым, т.к. при достижении выходным валом электропривода положения, соответствующего заданному на этот момент времени углу поворота исполнительного элемента дросселя, система управления электроприводом снимает электропитание с электродвигателя. Однако при этом на выходной вал электропривода действует возмущающий момент со стороны дросселя, вызванный гидродинамическими силами воздействия протекающего через дроссель потока компонента на исполнительный элемент дросселя. Вследствие значительного расхода компонентов в ракетных ЖРД этот возмущающий момент достаточно велик и вызывает соответствующее изменение положения исполнительного элемента дросселя и связанного с ним выходного вала электропривода, т.к. противодействующий возмущающему момент удержания выходного вала при отсутствии электропитания на электродвигателе мал - он определяется весьма малым моментом трения подшипников электродвигателя, приведенным к выходному валу через передаточное число редуктора, которое достаточно невелико вследствие жестких требовании к быстродействию электроприводов систем автоматики. Изменение положения выходного вала вырабатывает сигнал управления, подающий электропитание на электродвигатель, и исходное положение дросселя и выходного вала восстанавливаются, после чего описанный процесс циклически повторяется. В результате электропривод работает рывками, что вызывает ряд негативных последствий, начиная от колебаний тока, истощающих источник тока космического летательного аппарата (т.к. электродвигатель практически все время работает в пусковом режиме, характеризующемся пиковыми значения тока), и кончая автоколебаниями ЖРД, способными привести к его отказу. Вследствие того, что момент трения подшипников электродвигателя не является регламентируемым параметром, то он и соответственно момент удержания выходного вала при отсутствии электропитания на электродвигателе, значительно отличаются для различных экземпляров электроприводов одной и той же конструкции.
Техническим результатом, достигаемым с помощью заявленного изобретения, является обеспечение стабильного момента удержания выходного вала электропривода при отсутствии электропитания на его электродвигателе.
Этот результат достигается за счет того, что в известный электропривод, содержащий корпус, установленные в нем электродвигатель, редуктор из n (n=1, 2, ...) блоков зубчатых колес и выходной вал, а также основной гистерезисный тормоз, вал на подшипниках, установленный в корпусе основного гистерезисного тормоза, причем на корпусе основного гистерезисного тормоза жестко установлено зубчатое колесо, а на вале основного гистерезисного тормоза - шестерня, при этом основной гистерезисный тормоз размещен в кинематической цепи между электродвигателем и выходным валом, согласно изобретению введен дополнительный гистерезисный тормоз, жестко присоединенный своим корпусом к корпусу электропривода, а на вале дополнительного гистерезисного тормоза жестко установлен один из блоков зубчатых колес, размещенный в кинематической цепи между основным гистерезисным тормозом и выходным валом.
На чертеже приведен пример конкретного исполнения электропривода, продольный разрез.
Электропривод содержит сборный корпус 1, установленные в нем электродвигатель 2, редуктор 3 из n(n=2) блоков 4 и 5 зубчатых колес и выходной вал 6. Электропривод содержит также основной гистерезисный тормоз 7, вал 8 на подшипниках 9, установленный в корпусе 10 основного гистерезисного тормоза 7. На корпусе 10 основного гистерезисного тормоза 7 жестко установлено винтами зубчатое колесо 11, а на вале 8 основного гистерезисного тормоза 7 - шестерня 12 (посредством штифта). На вале электродвигателя 2 жестко закреплена (штифтом) шестерня 13, введенная в зацепление с колесом 11. Шестерня 12 введена в зацепление с ведомым, т.е. воспринимающим крутящий момент от шестерни 12, зубчатым колесом блока 4. Ведущее, т.е. передающее крутящий момент на вал 6, зубчатое колесо блока 5 введено в зацепление с зубчатым колесом 14, выполненном на выходном вале 6. Таким образом, основной гистерезисный тормоз 7 размещен в кинематической цепи электропривода между электродвигателем 2 и выходным валом 6. В электропривод введен идентичный основному дополнительный гистерезисный тормоз 15, жестко присоединенный своим корпусом 16 посредством винтов 17 к корпусу 1 электропривода, а на вале 18 дополнительного гистерезисного тормоза 15 жестко (штифтовым соединением) установлен один из блоков зубчатых колес - блок 5, размещенный в кинематической цепи между основным гистерезисным тормозом 7 и выходным валом 6. Вал 18 установлен в корпусе 16 дополнительного гистерезисного тормоза 15 на подшипниках 19. Основной гистерезисный тормоз 7 установлен в корпусе 1 на подшипниках 20. Блок 4 и выходной вал 6 установлены в корпусе 1 на подшипниках 21 и 22 соответственно.
Электропривод работает следующим образом: при подаче питающего напряжения на электродвигатель 2 вращается его вал с шестерней 13. Далее вращение передается на зубчатое колесо 11, корпус 10 основного гистерезисного тормоза 7 за счет магнитного взаимодействия на вал 8 и установленную на нем шестерню 12. Эта шестерня приводит в движение блоки 4 и 5 зубчатых колес и далее через колесо 14 - выходной вал 6. Редуктор 3 обеспечивает преобразование момента электродвигателя 2 в момент на выходном вале 6, основной гистерезисный тормоз 7 обеспечивает защиту элементов электропривода от перегрузки по моменту так же, как и в прототипе. Дополнительный гистерезисный тормоз 15 оказывает сопротивление вращению блока 5 шестерен с моментом, равным моменту срабатывания гистерезисного тормоза, за счет того, что его вал 18, жестко связанный с блоком 5 шестерен, вынужден проворачиваться относительно неподвижного корпуса 16. Вращение вала 18 в подшипниках 19 возможно, т.к. момент, передаваемый от электродвигателя на блок 5 зубчатых колес, превосходит момент срабатывания тормоза 15. Действительно, вследствие того, что блок 5 размещен в кинематической цепи между основным гистерезисным тормозом 7 и выходным валом 6, момент, создаваемый на вале 17 блоком 5 зубчатых колес, равен моменту срабатывания тормоза 7, умноженному на передаточное отношение от шестерни 12 до ведомого зубчатого колеса блока 5. За счет того, что в приводе использован редуктор, а не мультипликатор, упомянутое передаточное отношение существенно больше единицы, поэтому движущий момент, передаваемый валу 17 со стороны электродвигателя 2, превосходит момент сопротивления тормоза 15. В то же время при снятии питания с электродвигателя 2 выходной вал 6 удерживается в неподвижном состоянии моментом срабатывания тормоза 15, т.к. для проворота вала 6 надо преодолеть момент срабатывания тормоза 15, приведенный к валу 6. Следует отметить, что обеспечение стабильного момента удержания выходного вала электропривода при отсутствии электропитания на его электродвигателе достигнуто не путем простого механического введения дополнительного устройства - тормоза, а посредством придания элементам дополнительного гистерезисного тормоза дополнительных функций: подшипники гистерезисного тормоза наряду с обеспечением соосности вала и корпуса гистерезисного тормоза несут функции опор вращения одного из блоков зубчатых колес редуктора. По сравнению с прототипом в заявленном устройстве устранена одна пара подшипников блока зубчатых колес: основной гистерезисный тормоз 7, блок 4 зубчатых колес и выходной вал 6 вращаются в подшипниках 20, 21 и 22 соответственно, а блок 5, установленный на валу 18 дополнительного гистерезисного тормоза 15, вращается в подшипниках 19 последнего.
Указанное преимущество - обеспечение стабильного момента удержания выходного вала электропривода при отсутствии электропитания на его электродвигателе позволяет рекомендовать заявленное техническое решение к использованию в позиционных электроприводах агрегатов систем автоматики жидкостных реактивных двигателей (ЖРД) изделий авиационной и космической техники.
Источники информации
1. Чернавский С. А., Снесарев Г.А., Козинцов Б.С. и др. Проектирование механических передач. Учебно-справочное пособие для втузов. - М.: Машиностроение, 1984, с.12, рис.12а.
2. Патент Российской федерации 2039897, кл. F 16 H 1/06, 1995 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР ДЛЯ ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2039897C1 |
| ПРИВОД РАСКРЫТИЯ | 2013 |
|
RU2542798C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД РАСКРЫТИЯ | 2011 |
|
RU2472284C1 |
| ГОРНЫЙ КОМБАЙН | 2000 |
|
RU2171375C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| Двухступенчатый конический волновой редуктор с электродвигателем | 2021 |
|
RU2771554C1 |
| ЭЛЕКТРОПРИВОД | 2002 |
|
RU2216667C1 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2173420C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА С УПРУГИМ ЗАЦЕПЛЕНИЕМ - ЭП ПЦР-У | 2007 |
|
RU2358375C2 |
Изобретение относится к деталям машин и может быть использовано в составе приводов систем автоматики изделий космической техники. Электропривод содержит корпус, установленные в нем электродвигатель, редуктор из n(n=1, 2, . . . ) блоков зубчатых колес, выходной вал, основной гистерезисный тормоз, дополнительный гистерезисный тормоз и вал на подшипниках, установленный в корпусе основного гистерезисного тормоза. На корпусе основного гистерезисного тормоза жестко установлено зубчатое колесо. На вале основного гистерезисного тормоза установлена шестерня. Основной гистерезисный тормоз размещен в кинематической цепи между электродвигателем и выходным валом. Дополнительный гистерезисный тормоз жестко присоединен своим корпусом к корпусу электропривода, а на его вале жестко установлен один из блоков зубчатых колес, размещенный в кинематической цепи между основным гистерезисным тормозом и выходным валом. Техническим результатом является обеспечение стабильного момента удержания выходного вала электропривода при отсутствии электропитания на его электродвигателе. 1 ил.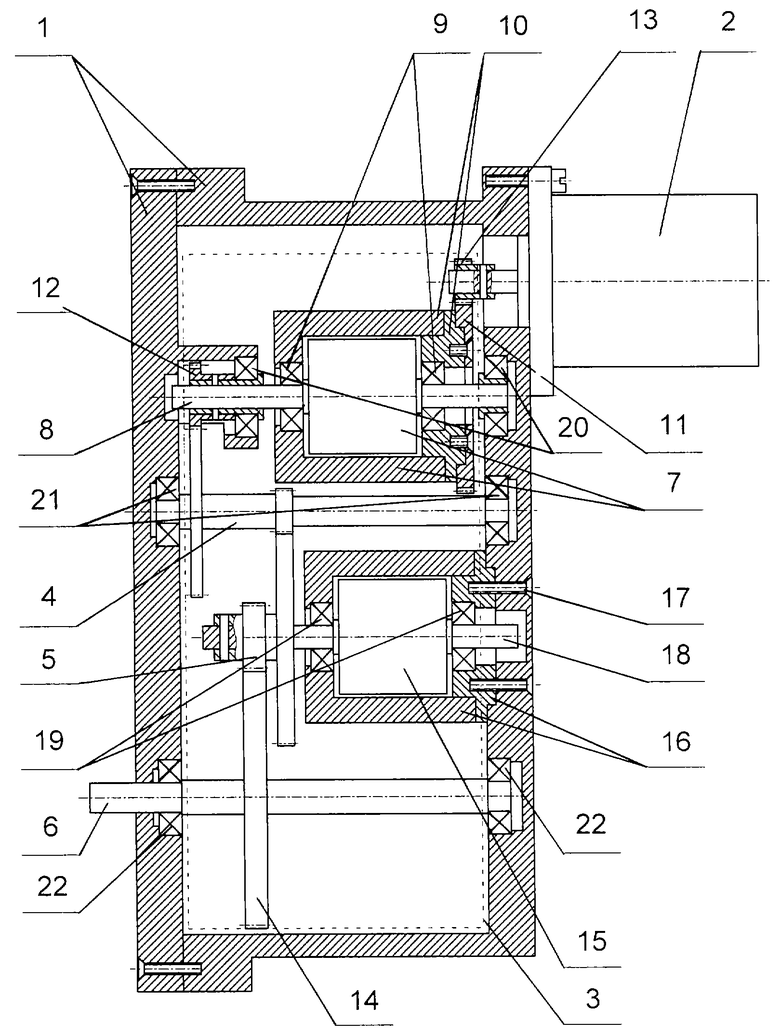
Электропривод, содержащий корпус, установленные в нем электродвигатель, редуктор из n (n=1, 2,...) блоков зубчатых колес и выходной вал, а также основной гистерезисный тормоз, вал на подшипниках, установленный в корпусе основного гистерезисного тормоза, причем на корпусе основного гистерезисного тормоза жестко установлено зубчатое колесо, а на вале основного гистерезисного тормоза - шестерня, при этом основной гистерезисный тормоз размещен в кинематической цепи между электродвигателем и выходным валом, отличающийся тем, что в него введен дополнительный гистерезисный тормоз, жестко присоединенный своим корпусом к корпусу электропривода, а на вале дополнительного гистерезисного тормоза жестко установлен один из блоков зубчатых колес, размещенный в кинематической цепи между основным гистерезисным тормозом и выходным валом.
| РЕДУКТОР ДЛЯ ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2039897C1 |
| Чернавский С.А | |||
| и др | |||
| Проектирование механических передач | |||
| Учебно-справочное пособие для втузов | |||
| - М.: Машиностроение, 1984, с.35, рис.3.3. | |||

