Изобретение относится к арматуростроению, а именно к средствам управления запорной арматурой трубопроводов при помощи электропривода, и предназначено для управления потоками жидкости, газа и сыпучих тел.
Известна двухскоростная саморегулирующаяся реверсивная планетарная зубчатая передача, содержащая ведущий вал, на котором закреплено солнечное колесо, водило с сателлитами, коронное колесо, связанное храповым механизмом с корпусом, пластинчатые пружины, установленные на водиле и воздействующие на рычаги собачек храпового колеса, червячную пару, червяк которой шлицевым соединением связан с водилом, фрикционную муфту, ведущие диски которой установлены в червяке на шлицах ведущего вала, а ведомые диски соединены посредством шлицевого соединения с червяком и упруго поджаты с двух сторон. (А. с. СССР N 361338, МПК F 16 H 3/46, 1973).
В данной передаче с ростом момента на выходном валу на червяке развивается осевое усилие, под действием которого муфта включает планетарную передачу в работу. К недостаткам данного устройства можно отнести то, что в переходный момент, когда осевое усилие червяка равно усилию переключения скоростей, обе скорости отключаются, или происходит многократное сцепление и расцепление муфты, то есть, происходит колебательный процесс перехода с одной скорости на другую. Поэтому данная двухскоростная передача из-за низкой надежности переключения скоростей на практике не нашла себе применения.
Известен электропривод запорной арматуры, содержащий электродвигатель, планетарный редуктор и дифференциальный механизм. Планетарный редуктор состоит из заторможенного входного вала-водила, первого центрального колеса с внешним червячным зацеплением и внутренним цилиндрическим зубчатым зацеплением, сателлитов и второго центрального колеса, жестко связанного с приводным валом запорного органа. Дифференциальный механизм электропривода выполнен в виде водила с сателлитами и двумя центральными колесами, одно из которых жестко соединено с валом электродвигателя, а другое колесо закреплено на валу, несущем самотормозящий червяк, находящемся в червячном зацеплении с первым центральным колесом редуктора, причем водило дифференциала кинематически связано с входным валом-водилом редуктора. Входной вал-водило заторможен, например, фиксатором положения, выполненным в виде колеса, жестко закрепленного на входном валу-водиле, в котором выполнены углубления, и подпружиненного шарика, размещенного в корпусе. (Патент РФ N 2076255, МПК6 F 16 H 37/08, 27.03.97).
Хотя данный электропривод хорошо зарекомендовал себя в работе, он имеет существенный недостаток, обусловленный наличием двух червячных пар. Наличие червячных пар не только снижает КПД привода, но и существенно повышает его себестоимость, поскольку колеса червячных пар изготавливают из медных дорогостоящих сплавов.
В качестве прототипа по наибольшему числу совпадающих существенных признаков с заявленным выбран электропривод по а.с. СССР N 565858, МПК2 B 65 G 23/26, 14.11.77. Электропривод содержит электродвигатель, редуктор с дифференциальным механизмом, выполненным в виде внешнего колеса, водила с сателлитами, входной вал которого с закрепленным на нем внутренним колесом соединен с электроприводом, а выходной вал - с блоком приводной звездочки. Электропривод содержит также электромагнитную муфту скольжения (ЭМС), установленную на полом валу охватывающим входной вал редуктора и на котором установлена шестерня. В корпусе ЭМС закреплены валы паразитных шестерен, взаимодействующие с внешним колесом и шестерней планетарной передачи. В данном приводе подключение планетарной передачи к нагрузке осуществляется после набора электродвигателем номинального числа оборотов путем подачи тока в обмотку возбуждения ЭМС, индуктор которой затормаживает внешнее центральное колесо планетарной передачи. В случае перегрузки ток возбуждения выключается и индуктор ЭМС растормаживается, отключая планетарную передачу. К недостаткам данного привода следует отнести невозможность реализации двух различных скоростей передачи, необходимых при управлении запорной арматурой. Кроме того, устройство содержит такой элемент как муфту, что усложняет конструкцию привода.
Настоящее изобретение решает задачу расширения функциональных возможностей электропривода за счет получения второй скорости вращения приводного вала запорного органа в отсутствии предельных моментов уплотнения запорного органа, а также повышение надежности автоматического переключения с повышенной скорости на скорость с повышенным крутящим моментом при наличии увеличенной нагрузки на приводном валу запорного органа.
Данная задача решается тем, что в электроприводе, содержащем электродвигатель и размещенный в корпусе редуктор с первым дифференциальным механизмом, выполненным в виде планетарной передачи с центральным зубчатым колесом, закрепленным на центральном валу, внешним зубчатым колесом, выходным валом-водилом, сателлитами, паразитными шестернями, взаимодействующими с внешним зубчатым колесом и шестерней, установленной на полом валу, охватывающим центральный вал, при этом валы паразитных шестерен закреплены на опоре, свободно установленной на полом валу, введен второй дифференциальный механизмом. Второй дифференциальный механизм выполнен в виде центрального зубчатого колеса установленного на полом валу, сателлитов, кинематически связанных зубчатой парой с валом электродвигателя, и нормально заторможенного относительно корпуса тормозом водила, жестко закрепленного на центральном валу. Кроме того, первый дифференциальный механизм снабжен стопором, содержащим подпружиненную относительно корпуса защелку, взаимодействующую с пазами, выполненными на боковой поверхности внешнего колеса, а опора валов паразитных шестерен снабжена подпружиненными относительно корпуса упорами от поворота вокруг центрального вала и кинематически связана с защелкой стопора внешнего колеса и тормозом водила второго дифференциального механизма.
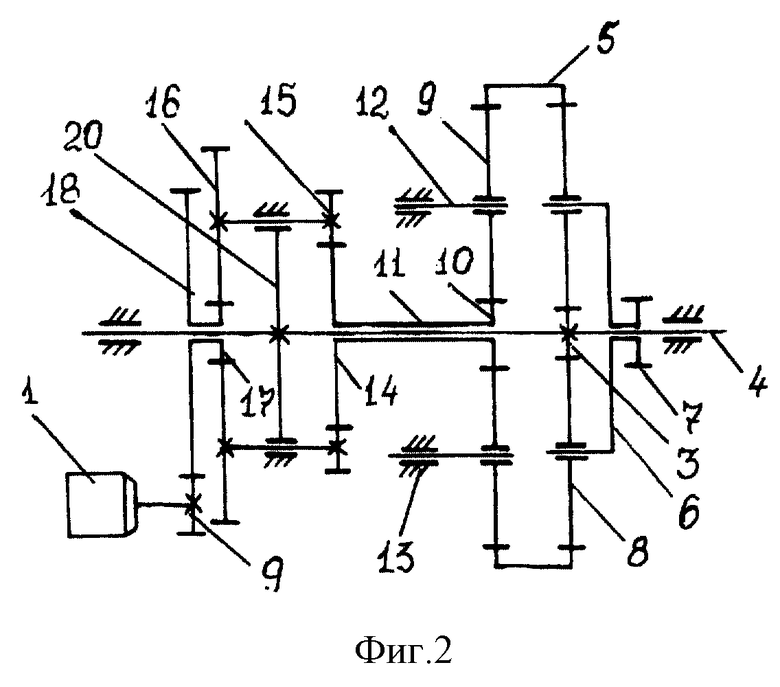
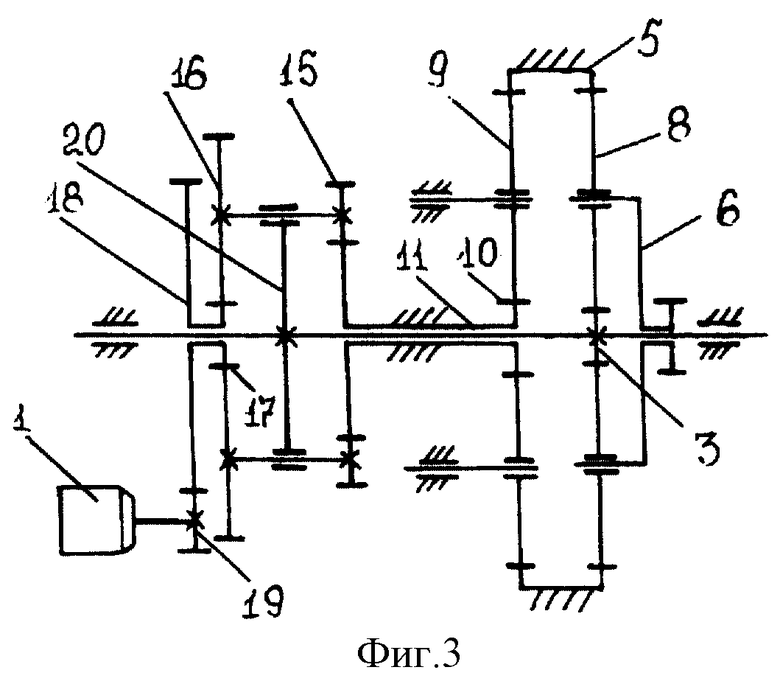
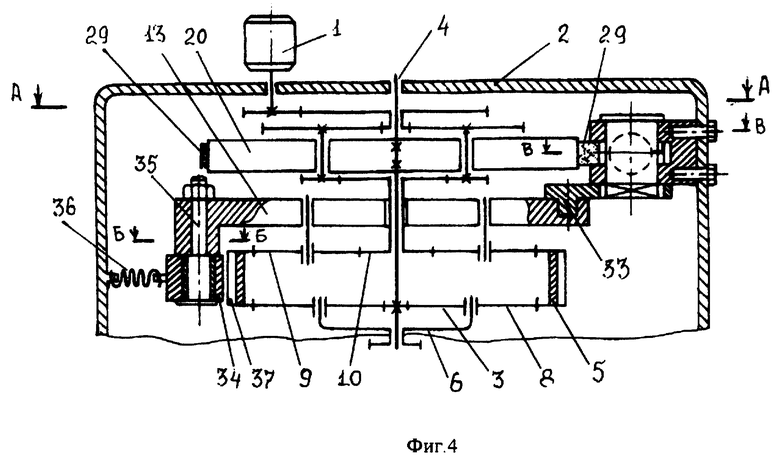
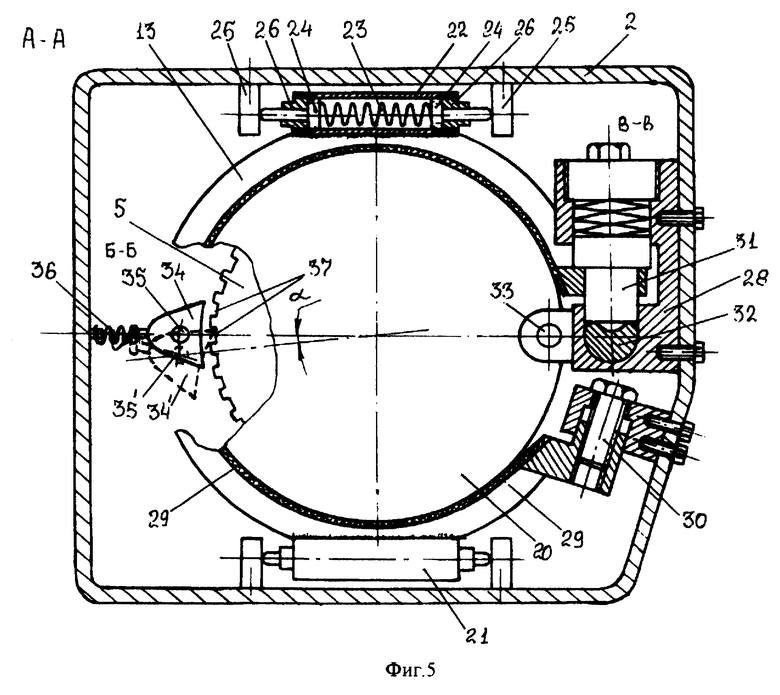
На фиг. 1 представлена кинематическая схема электропривода в общем виде; на фиг. 2 - кинематическая схема электропривода в режиме работы с нагрузкой на выходном валу ниже предельной; на фиг. 3 - то же самое, но в режиме работы с нагрузкой выше предельной; на фиг. 4 - продольный разрез электропривода; на фиг. 5 - разрез А-А фиг. 4.
Электропривод содержит электродвигатель 1, размещенный в корпусе 2 редуктор с двумя дифференциальными механизмами. Первый дифференциальный механизм выполнен в виде планетарной передачи, содержащей центральное зубчатое колесо 3, закрепленное на центральном валу 4, нормально расторможенное внешнее зубчатое колесо 5, выходной вал-водило 6 с выходной шестерней 7, сателлиты 8, паразитные шестерни 9, взаимодействующие с внешним зубчатым колесом 5 и шестерней 10, закрепленной на полом валу 11, охватывающим центральный вал 4. Валы 12 паразитных шестерен 9 закреплены в опорном колесе 13 (опоре), свободно установленном на полом валу 11.
Второй дифференциальный механизм содержит центральное зубчатое колесо 14, установленное на полом валу 11, сателлиты 15,16 кинематически связанные зубчатыми колесами 17, 18, 19 с валом электродвигателя 1, и нормально заторможенное относительно корпуса 2 водило 20, жестко закрепленное на центральном валу 4.
Причем опора 13 паразитных шестерен 9 снабжена, по крайней мере, одним подпружиненным относительно корпуса 2 упором 21. Упор может быть выполнен, например, в виде направляющего цилиндра 22, жестко закрепленного на опорном колесе 13 и двух подпружиненных пружиной 23 относительно друг друга плунжеров 24, взаимодействующих с ограничителями поворота 25, закрепленными на корпусе 2. Усилие поджатия плунжеров 23 регулируется гайками 26.
Тормоз 27 водила 20 содержит корпус 28 и тормозную ленту 29, охватывающую по боковой поверхности водило 20, и устройство регулирования натяжения ленты, размещенное в корпусе 28 тормоза 27. Причем один конец ленты 29 закреплен на корпусе электропривода 2 посредством регулируемого стяжного винта 30, а второй конец ленты 29 закреплен на плунжере 31. Плунжер 31 одним торцом подпружинен относительно корпуса 28 тормоза, обеспечивая заданное натяжение тормозной ленте 29, а вторым торцом взаимодействует с эксцентриком 32, размещенным в корпусе 28 тормоза с возможностью поворота. Ось поворота 33 эксцентрика 32 установлена в опорном колесе 13.
Внешнее (коронное) зубчатое колесо 5 первого дифференциального механизма снабжено стопором. Стопор выполнен в виде защелки 34, ось поворота 35 которой установлена в опорном колесе 13. Защелка 34 с одной стороны пружиной натяжения 36 связана с корпусом 2 электропривода, а с другой стороны имеет возможность взаимодействия с пазами 37, выполненными на боковой поверхности внешнего зубчатого колеса 5.
Опорное колесо 13 вместе с подпружиненными относительно корпуса 2 упорами 21 играет роль датчика момента и кинематически связано с защелкой 34 стопора внешнего колеса 5 и эксцентриком 32 тормоза водила 20.
Электропривод с двухскоростной саморегулирующей передачей работает следующим образом.
В исходном положении водило 20 второго дифференциального механизма заторможено, поэтому заторможен и центральный вал 4, а внешнее колесо 5 первого дифференциального механизма расфиксировано. Сателлиты 15 и центральное колесо 14 второго дифференциального механизма образуют обычную зубчатую пару (фиг. 2). В этом положении вращение вала электродвигателя 1 (в любую сторону) передается через зубчатые колеса 19, 18, 17, 16, 15, 14, 10, паразитным шестерням 9. Далее вращение от паразитных шестерен 9 передается внешнему колесу 5, сателлитам 8, которые, обкатываясь вокруг неподвижного центрального колеса 3, передают вращение выходному валу-водиле 6. На первом режиме работы электропривода он имеет на выходе повышенную скорость вращения выходного вала.
При работе электропривода в режиме движения запорного органа как на открытие, так и на закрытие, в момент его страгивания на выходном валу-водиле 6 развивается значительный тормозящий момент, который через сателлиты 8 передается на центральное колесо 5 первого дифференциального механизма, затормаживая его. В этом случае, если тормозящий момент на колесе 5 будет достаточно большим, то паразитные шестерни 9 будут выполнять функцию сателлитов, а опорное колесо 13 - водила их валов. Тогда крутящий момент передается паразитным шестерням 9 (сателлитам) от электродвигателя 1 через зубчатые колеса 19, 18, 17, 16, 15, 14, 10, поворачивая опорное колесо 13 на некоторый угол α, который ограничивается подпружиненными упорами 21. При повороте опорного колеса 13 перемещается и ось 35 защелки 34. Так как защелка одним концом пружиной сжатия 36 связана с корпусом 2, то она займет положение 34', войдя в паз 37 внешнего колеса 5, надежно зафиксировав его от вращения. Одновременно за счет поворота опорного колеса 13 повернется и эксцентрик 32, который переместит подпружиненный плунжер 31 тормоза водила 20. Тормозная лента 29 ослабнет и водило 20 растормозится. В данном режиме водило 20 второго дифференциального механизма будет расторможено, а внешнее колесо 5 первого дифференциального механизма - заторможено. Заторможены будут и паразитные шестерни 9, шестерня 10, полый вал 11 и центральное колесо 14 второго дифференциального механизма (фиг. 3). В этом случае электропривод перейдет на второй режим работы. При данной кинематической схеме вращение вала электродвигателя 1 (в любую сторону) передается через зубчатые колеса 19, 18, 17, сателлитам 16, 15, и водилу 20 второго дифференциального механизма, а вместе с ним и центральному валу 4 с центральным колесом 3. При заторможенном внешнем колесе 5 крутящий момент, как и в первом случае, будет поступать на вал- водило 6, обеспечивая ему пониженную (вторую) скорость вращения с большим крутящим моментом на запорном органе.
После страгивания запорного органа с места крутящий момент на выходном валу-водиле 6 резко упадет. При снижении нагрузки на приводном валу запорного органа до значений, когда упругие упоры 21 обеспечат обратный поворот опорного колеса 13, оно вернется в исходное положение. При этом защелка 34 стопора освободит внешнее колесо, а эксцентрик 32 освободит подпружиненный плунжер 31, обеспечив торможение водила 20 тормозной лентой 29. Привод перейдет к работе в первоначальный режим с повышенной скоростью, описанный выше.
Соответствующим подбором шестерен можно изменять диапазон соотношения скоростей двух режимов работы электропривода. При этом можно обеспечить даже пониженную скорость вращения выходного вала на первом режиме работы электропривода и повышенную скорость во втором режиме.
В заявленном электроприводе переход с одной скорости передачи на другую и обратно осуществляется без динамических нагрузок, автоматически, при изменении момента нагрузки на выходном валу. К тому же отсутствие в передаче электропривода переключающих устройств повышает надежность электропривода. Кроме того, при использовании данного электропривода осуществляется надежное и быстрое открытие и закрытие запорной арматуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| Зажимной патрон | 1990 |
|
SU1787072A3 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ И ВРУЧНУЮ | 2007 |
|
RU2332607C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Планетарная коробка передач | 2017 |
|
RU2646982C1 |
| ВЕДУЩИЙ УПРАВЛЯЕМЫЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2468936C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| АВТОМОБИЛЬНАЯ МНОГОСТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2012 |
|
RU2508486C1 |
Изобретение относится к арматуростроению, а именно к средствам управления запорной арматурой трубопороводов. Электропривод содержит электродвигатель, два дифференциальных механизма, тормоз и стопор. Первый дифференциальный механизм имеет центральное зубчатое колесо 3, внешнее зубчатое колесо 5, выходной вал-водило 6 с сателлитами 8 и стопор. Второй дифференциальный механизм имеет центральное зубчатое колесо 14, водило 20 с сателлитами 15, 16, зубчатое колесо 17 и тормоз 27 водила 20. Паразитные шестерни 9 взаимодействуют с внешним колесом 5 и шестерней 10. установленной на полом валу 11. Стопор защелкой 34 взаимодействует с пазами 37 внешнего колеса 5. Валы шестерен 9 закреплены на опоре 13. Опора 13 кинематически связана с защелкой 34 и тормозом 37 и подпружинена относительно корпуса 2 упорами от проворота вокруг центрального вала 4. Расширены функциональные возможности электропривода и повышена надежность автоматического переключения с повышенной скорости на скорость с повышенным крутящим моментом. 5 ил.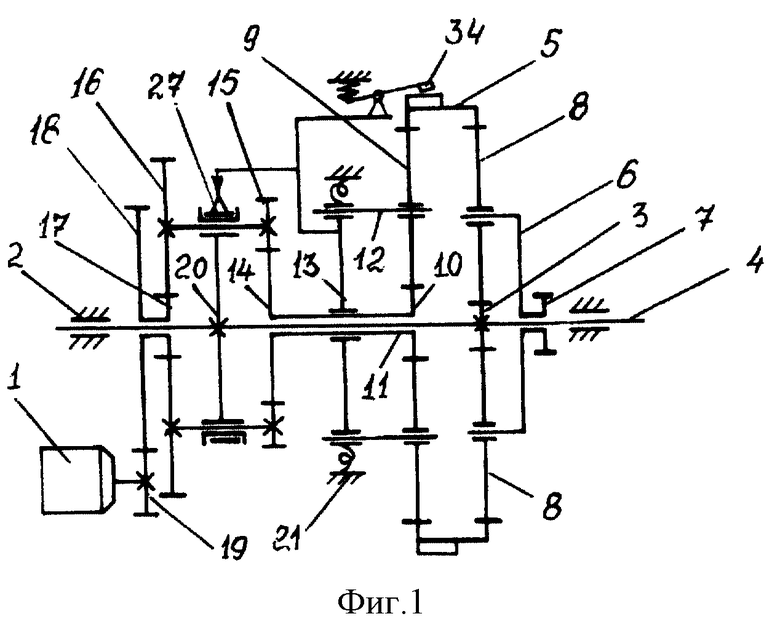
Электропривод, содержащий электродвигатель и размещенный в корпусе редуктор с первым дифференциальным механизмом, выполненным в виде планетарной передачи с центральным зубчатым колесом, закрепленным на центральном валу, внешним зубчатым колесом, выходным валом-водилом, сателлитами, паразитными шестернями, взаимодействующими с внешним зубчатым колесом и шестерней, установленной на полом валу, охватывающим центральный вал, при этом валы паразитных шестерен закреплены на опоре, свободно установленной на полом валу, отличающийся тем, что он снабжен вторым дифференциальным механизмом, выполненным в виде центрального зубчатого колеса, установленного на полом валу, сателлитов, кинематически связанных зубчатой парой с валом электродвигателя, и нормально заторможенного относительно корпуса тормозом водила, жестко закрепленного на центральном валу, кроме того, первый дифференциальный механизм снабжен стопором, содержащим подпружиненную относительно корпуса защелку, взаимодействующую с пазами, выполненными на боковой поверхности внешнего колеса, а опора валов паразитных шестерен снабжена подпружиненными относительно корпуса упорами от поворота вокруг центрального вала и кинематически связана с защелкой стопора внешнего колеса и тормозом водила второго дифференциального механизма.
| 0 |
|
SU403102A1 | |
| ВСЕСОЮЗНАЯ! «? П.1Т'П-;< ••>&.,,-, ,.,•* | 0 |
|
SU361338A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| 0 |
|
SU154543A1 |

