Электропривод на базе планетарного циклоидального редуктора с упругим зацеплением (ЭП ПЦР-У) относится к мотор-редукторам, электроприводам и может быть использован в прецизионных приводах роботов и манипуляторов, в наземной и космической навигациях, в станкостроении, на транспорте, в электромобилях, в грузоподъемных механизмах и лебедках, для передачи вращения в герметичное пространство, в нефтегазовой промышленности. В последнее время все большее применение находят мотор-редукторы (речь идет здесь и ниже об электроприводах), которые монтируются в едином корпусе, характеризуются меньшими габаритными размерами, небольшим числом деталей, низким уровнем шума в процессе работы и используются, в основном, в грузоподъемных механизмах и такелажных работах.
Исследования аналогов изобретения открыли своеобразные передачи с упругим зацеплением между грунтом Земли и резиновыми колесами, автопокрышками транспорта, известные более сотни лет. Они характеризуются высокими: надежностью, ресурсом и приспособляемостью [9, 10] к эксплуатации в экстремальных условиях и перегрузках, и к самоорганизации по формированию грунтового зацепления, ремонтопригодностью. У них высокая перспективность долговечности эксплуатации при многотонных перевозках и к высоким скоростям движения при бесшумном характере эксплуатации. Налицо своеобразный и оригинальный аналог и прототип изобретения. Недостатки и аварийность аналога устранены в предлагаемом изобретении ЭП ПЦР-У. Так малая зона зацепления автопокрышки с грунтом (~10°) расширяется многозаходностью и большей упругой зоной зацепления у ЭП ПЦР-У до 300° и более (фиг.2÷6).
У изобретения повышены надежность, ресурс работы, КПД передачи (≥95%), и по характеристикам основаны на расчете и внедрении в производство оптимальных условий проектирования и эксплуатации, при необходимости и со смазкой, что невозможно для грунтового зацепления. Изобретение применимо в промышленности и обеспечивается широким выбором необходимого сортамента материалов, расчетом перспективной технологии производства и эксплуатации, у него выше самоорганизующееся (приспосабливающееся) свойство [9].
Конструкция ЭП ПЦР-У предусматривает лучшее энергосбережение и уменьшение электромагнитных потерь в моторах электропривода, в ней расширен диапазон передаточных отношений (i≥10÷4000), у аналога и прототипа он ограничен. ЭП ПЦР-У характеризуется безлюфтовым и бесшумным характером работы и эксплуатации, что при минимальных габаритах электропривода и его автономности чрезвычайно важно для его быстрого внедрения в подводные лодки, вертолеты и в исследования при экстремальных условиях дна океана и космоса.
Электропривод ПЦР-У ценен возможностью сохранять и учитывать прошлую эксплуатацию и информацию, что повышает его оптимальность в системах автоматического управления и регулирования (САУ).
Электропривод ПЦР-У может быть сопряжен и включен в сеть обычного непрерывного электродвигателя, в том числе специального, а также сопрягаться с дискретными системами управления от дискретных датчиков импульсов или от ЦВМ.
Технические аналоги изобретения - это мотор-редукторы [1] французских, американских, японских и других фирм. Например, мотор-редуктор France. Pat. №1440594, 1966. Технический прототип изобретения - это мотор-редуктор по фиг.1, как и другие мотор-редукторы, представляют робой механическое соединение электродвигателя - ЭД и редуктора в одном общем корпусе. При этом не происходит объединение ряда узлов и агрегатов по выполнению ими примерно равных операций, общее число подшипников увеличивается.
Наиболее близким по технической сущности является планетарный циклоидальный редуктор разработки Минского института проблем надежности машин АН БССР, 1988 г., который принят за прототип (фиг.1) и содержит корпус 6, крышку 13, входной (ведущий) и выходной (ведомый) валы 1 и 7, неподвижное центральное (солнечное) колесо 11 с рядом роликов (цевок) 10, циклоидальные сателлиты 3, 5 блока сателлитов 4, установленного на входном валу 1 на подшипниках вала 14 и на эксцентрично расположенных подшипниках сателлитов 15, внутри центральных колес 11, 12, циклоидальные зубья которых зацепляются с зубьями центральных колес; пальцы 9, запрессованные во фланец выходного вала (подвижного выходного колеса 12) и свободно надетые на них ролики 8, входящие в зацепление с сателлитом 5 блока сателлитов 4, ролики (цевки) 10 неподвижного центрального колеса 11 и ролики (цевки) 8 выходного вала 7 (подвижного центрального колеса 12).
Блок сателлитов 4 прототипа по фиг.1 находится в постоянном зацеплении с центральными колесами 11 и 12, жестко закрепленными соответственно в корпусе 6 и на выходном валу 7. Блок сателлитов 4 соединен с эксцентриковым валом 2 электрическим двигателем ЭД на подшипниках 15, а через подшипники в крышке 13, выходной вал 7 подвижного колеса 12 соединен с нагрузкой. В аналогичной последовательности происходит и работа указанного прототипа.
Недостатками прототипа являются:
- возможный диапазон передаточных чисел ограничен в пределах 7-5000 и не может быть регулируемым;
- КПД представленного прототипа не превышает 92%;
- редуктор прототипа одноступенчатый, нерегулируемый;
- ограничен срок службы - 30000-50000 часов;
- многопарное зацепление не превышает 70%;
- «жесткое» (как у традиционных эвольвентных и червячных передач) зацепление требует необходимых монтажных зазоров. Отсюда возможны люфты, обеспечение минимальных зазоров приводит к существенным затратам производства;
- массивный блок сателлитов имеет значительный момент инерции, что приводит к перегрузке быстроходных подшипников блока сателлитов и снижает ресурс работы редуктора;
- сложность конструкции, наличие блока сателлитов, сплошные трубчатые цевки, которые упругостью не обладают, наличие быстроходных подшипников блока сателлитов.
Многолетние исследования показывают, что создание конструкции электропривода с редуктором с устранением указанных недостатков прототипа невозможно при простом механическом объединении электродвигателя (электромотора) и редуктора.
Необходимо коренное изменение подхода к объединению агрегатов электромотора и редуктора, основанное на слиянии и совершенствовании их функций. То есть электромотор должен стать частью редуктора с выполнением его функций, а редуктор должен стать частью электромотора со свойственной ему работой.
1. Указанные недостатки устранены в предлагаемом изобретении ЭП ПЦР-У, содержащим корпус с крышкой, электродвигатель, закрепленный через подшипники на валу, связанный с редуктором и передающим через него вращение электродвигателя на выходной вал, отличающимся от прототипа применением в нем упругого магнитопроводящего многопарного эластичного (пружинного) зацепления, у которого эластичный сателлит изготовлен из резины с кордом (типа автопокрышки - один вариант), зацеплен и взаимодействует с зубьями центральных колес в виде витых сваренных в тор стальных пружин (или в виде готовых витых стальных роликов ШП). У аналогов и прототипа используется стальное жесткое однопарное зацепление устаревшего эвольвентного профиля (см. труды академика А.А.Благонравова) с наличием люфтов и зазоров в зацеплении, с ударным характером его работы, приводящим к значительному трению, износу, сокращению ресурса эксплуатации, к разрушению прототипа, а шумы при эксплуатации приводят к обнаружению его при работе, что недопустимо для военных подводных лодок и т.п. Многопарное эластичное зацепление изобретения отличается большими передаваемыми усилиями и моментами, надежностью, прочностью, большей перегрузочной способностью, длительным ресурсом эксплуатации (≥25 лет) и КПД≥95% при оптимальном самонастраивающемся характере работы в экстремальных условиях эксплуатации и при воздействии на него электромагнитных ядерных импульсов.
2. Изобретение ЭП ПЦР-У по п.1, отличающийся от прототипа экономичностью, технологичностью производства, простотой конструкции, необходимой для серийного внедрения, изготовления и исследований электропривода, поскольку для производства ЭП ПЦР-У используются готовые автопокрышки с несущественной доработкой в них зубьев-впадин. Конструкция ЭП ПЦР-У совершенна и тем, что его упругий сателлит находится в постоянном зацеплении с витыми стальными роликами ШП (пружинами), которые изготавливаются шарикоподшипниковьми заводами. Затраты на производство ЭП ПЦР-У сокращаются ~ в пять раз с расширением его внедрения в оборонную, авиационную, космическую, вертолетную, машиностроительную и др. технику. При этом увеличивается ресурс работы до 25 лет, надежность, прочность, передаваемые моменты и усилия, КПД до ≥95%, при бесшумном характере его эксплуатации. Важно и то, что производство ЭП ПЦР-У носит сборочный, экономичный характер из готовых деталей: из автопокрышек и готовых, стальных витых роликов ШП. Производство прототипа же требует значительных затрат металла, средств по сложному его изготовлению - зубодолбление, зубофрезерование, термообработка и т.п. Отсюда внедрение изобретения ЭП ПЦР-У перспективно для высокоточных объектов оборонной, ракетной, космической и др. техники. Конструкция сдвоенных пружин и сфер зацепления показана на фиг.7.
3. Изобретение ЭП ПЦР-У, отличающееся упругим эластичным, пружинным зацеплением в виде пружин, сваренных в общую конструкцию в виде тора, характеризуется оптимальным, самонастраивающимся зацеплением циклоидального профиля. Его оптимальность заключается в том, что круговинтовой вогнутый профиль эластичного сателлита сопрягается с выпуклым профилем (зубьями) центральных колес, витых роликов (другой вариант). У прототипа используется устаревшее эвольвентное зацепление (см.п.1), у которого выпуклый профиль зубьев шестерен зацепляется также с выпуклым профилем зубьев колес. Отсюда у прототипа существуют люфты и зазоры зацепления при значительном трении, ударном характере его работы, приводящим к разрушению всего привода. В итоге низкие ненадежность, ресурс работы и перегрузочная способность и низкий КПД, ≤92%. В результате экономичность производства эластичного, пружинного зацепления в виде горообразных пружин, витых роликов ШП значительно выше экономичности производства сплошных шестерен прототипа с устаревшим эвольвентным зацеплением, и при изготовлении 1/3 металла заготовок уходит в безвозвратные потери (в изменение формы, стружку). Технология производства эластичного, упругого, круговинтового вогнуто-выпуклого ЭП ПЦР-У в виде торообразных пружин, витых стальных роликов ШП является перспективным, ибо оно безотходно, изготовление пружин, роликов освоено промышленностью. Так, у изобретения ЭП ПЦР-У вогнутый профиль эластичного пружинного сателлита дорабатывается шлифованием, а у пружинных центральных колес выпуклый профиль остается выпуклым, т.е. не дорабатывается. Эксплуатация изобретения ЭП ПЦР-У носит безлюфтовой, бесшумный характер, прецизионная отработка командных сигналов происходит без потерь информации и при эксплуатации более 25 лет. Сателлит 5 по фиг.5 изготовлен (навит) на специальной оправке при разности в числе зубьев левой и правой части его в один зуб.
4. Электропривод по п.1 отличающийся тем, что в нем применен круговинтовой профиль герметичного сильфона, который при взаимодействии его с круговинтовым зацеплением электропривода ПЦР-У обеспечивает передачу усилий и моментов в герметичное пространство.
5. Электропривод по п.1, отличающийся тем, что переключение ступеней электропривода обеспечивается электрическим переключением шестисекционной электрообмотки 3 неподвижной центральной шестерни редуктора с зубьями Zb (см. фиг.5), чем достигается переход электропривода ЭП ПЦР-У на дискретное управление от импульсного блока управления или от ЦВМ с реализацией работы ЭП ПЦР-У как в непрерывном, так и дискретном режимах эксплуатации.
6. Известны автоматические сцепки из 2-х транспортных средств (2-х автотягачей, 2-х паровозов) для увеличения тяговых усилий при крутых подъемах и спусках, при торможении. Нами предложена сцепка 2-х электроприводных ПЦР с реализацией нового электропривода - изобретения с весьма значительным увеличением момента и усилий, крайне необходимых в технике. При этом сцепка из 2-х аналогов, прототипов абсолютно неперспективна, поскольку в этом случае используется устаревшее эвольвентное зацепление с наличием люфтов и зазоров, ударным характером работы, при значительном трении, низким ресурсом работы и разрушением зацепления при его эксплуатации в экстремальных условиях. В предлагаемой сцепке 2-х электроприводов с ПЦР, отличающейся использованием оптимального циклоидального многопарного, упругового вогнуто-выпуклового зацепления с улучшенными характеристиками по трению, бесшумному, безударному характеру эксплуатации, по ресурсу и КПД. При значительной экономичности и технологичности производства передаточное отношение сцепки 2-х электроприводов с ПЦР-У по увеличению моментов и усилий возрастает на один-два порядка.
7. Электропривод ЭП ПЦР-У по п.6 и п.5, отличающийся совершенной технологией изготовления, сбалансированным, упругим магнитопроводящим пружинным сателлитом с его центральным расположением и самоприспосабливающимся характером работы к объемным силам магнитного взаимодействия сателлита и центральных колес от электрической обмотки по скользящей посадке, а само магнитное взаимодействие сателлита и центральных колес выполнено по замкнутой магнитной цепи без воздушного зазора.
Требуемый технический результат и цель изобретения - совместить воедино в одной конструкции электромагнитные и механические функции электромотора и редуктора для существенного улучшения технико-экономических параметров электропривода на базе планетарного циклоидального редуктора с упругим зацеплением ЭП ПЦР-У.
Предлагаемый электропривод ПЦР-У обладает существенными отличиями. Так на фиг.2 показан планетарный циклоидальный редуктор ЭП ПЦР-У в продольном и поперечном разрезах соответственно, с использованием зубчатого зацепления в виде неподвижного Zb и подвижного Za центральных колес и соединенного с ними упругого эластичного сателлита 8. На фиг.3 схематично представлена конструкция ПЦР-У с показом упругодеформируемого зацепления на упругом основании. Это по существу новое оригинальное решение эластичного зацепления редуктора электропривода. На фиг.2 представлено эластичное зацепление в виде сборки двойных пружин 17 и 18, одетых на оси 14. В этих условиях реакция нагрузки передается на сателлит 8 и на сборку двойных пружин 17, 18.
Под силовым воздействием сателлита 8 сжимаются и растягиваются пружины 17, 18 объемно деформируются и приспосабливаются к действующей на них нагрузке, улучшая тем самым распределение нагрузки между большим число зубьев зацепления. В конструкции по фиг.3 упругое эластичное зацепление состоит из сборки пружин 17, 18, одетых на оси 14. Сборка пружин прижата упругим эластичным основанием 19 к осям 14 с усилиями в направлении от периферии венца фланца выходного вала 11 к центру. В этих условиях при работе редуктора зубья сателлита 8 воздействуют на сборку пружин 17, 18 на осях 14 и «заставляют» локально деформироваться упругое основание 19, тем самым и зубья шестерни выходного вала 13 наилучшим образом приспосабливаются к передаче больших моментов и мощностей, идущих по силовому потоку от входа редуктора, и через эластичное зацепление передаются на шестерню выходного вала 13, т.е. на нагрузку.
В итоге простое эластичное зубчатое зацепление сборных пружин и шестерен обеспечивает значительный силовой эффект на выходе редуктора по моментам и мощностям.
Таким образом, упрощена конструкция электропривода с редуктором и улучшены их характеристики. Одновременное попарное постоянное зацепление шестерен Zb с Zf и Za с Zq при разности в числе зубьев в один зуб обеспечивает значительное передаточное отношение и максимальный кинематический эффект передачи.
Передача усилий происходит в оптимальных условиях: вогнутые круглые зубья упругого эластичного сателлита 8 взаимодействуют с выпуклым профилем центральных пружинных колес 2 и 11 (фиг.2).
В предлагаемом варианте электропривода ПЦР-У с витыми пружинными роликами 2 и 11 и упругим сателлитом 8, по сути, создано новое эластичное двухстороннее прецизионное упругодеформируемое зубчатое зацепление без рабочих зазоров и люфтов, и при эксплуатации отсутствует проскальзывание.
Предлагаемые чертежи, включенные в описание изобретения и образующие его часть, иллюстрируют предпочтительные варианты реализации данного изобретения, и вместе с описанием служат для разъяснения принципов изобретения.
На фиг.1 показан прототип электропривода ПЦР-У.
На фиг.2 показан электропривод на базе планетарного циклоидального редуктора с упругим эластичным зацеплением - ЭП ПЦР-У.
На фиг.3 показан электропривод с конструкцией упругого основания 19 для передачи силовых усилий с входного вала на сателлит 8 и через сборные двойные пружины на осях 14. Усилия передаются на подвижную шестерню 11 выходного вала 13 в оптимальном, эффективном режиме без потери информации.
На фиг.4 показан вариант малогабаритного электропривода с ПЦР-У с использованием промышленной автопокрышки в качестве эластичного сателлита 8, который при вращении эксцентрикового входного вала 4 от ЭД передает это вращение при обкатывании сателлита по пружинам 2 неподвижного колеса и по пружинам подвижного колеса 15 на осях 14 на выходной вал 13 со значительным усилением рабочего момента за счет большого передаточного отношения редуктора.
На фиг.5 представлен вариант малогабаритного электропривода (М ЭП ПЦР-У), упругий пружинный сателлит 5 которого за счет углового эксцентрика при вращении вала 1 (с угловым эксцетриситетом - α) обкатывается по пружинам 4 и 7 неподвижного и подвижного центральных колес редуктора и со значительным усилением по моментам передает это вращение на выходной вал 9.
На фиг.6 представлены исследования электропривода в сопряжении сателлита с готовой автопокрышкой и управлением от специального мотора [10].
Упругодеформируемое зацепление ПЦР-У осуществляет обратную связь по нагрузке и обеспечивает работоспособность редуктора и электропривода в экстремальных условиях. Для производства эффективных электроприводов ПЦР-У достаточна точная технология производства как наиболее экономичная с преобладанием сборочных операций, т.е. отпадает необходимость копирования японских и других ПЦР, достаточно рассчитывать и изготовлять собственные, наиболее совершенные образцы электроприводов ПЦР-У, которые могут быть реализованы на базе отечественных шарикоподшипниковых производств и на базе шинной и автомобильной промышленности.
Надежность силовых элементов и узлов ПЦР-У обеспечивается учетом и приспособляемостью упругих агрегатов конструкции к случайному характеру силовой нагрузки, т.е. она демпфирует, гасит ударные, вибрационные, космические, температурные, радиационные, абразивные и другие виды нагрузок или их совокупность.
В этом случае передача усилий происходит в оптимальных условиях: вогнутые двухсторонние круглые впадины-зубья упругого сателлита взаимодействуют с выпуклым профилем упругодеформируемых зубьев неподвижного и подвижного центральных колес (шестерен) по фиг.2, 4, 5, 6 и наилучшим образом, без проскальзывания, приспосабливаются к передаче больших моментов и мощностей, чем обеспечивается значительный силовой эффект на выходе электропривода по моментам и мощностям, надежности, ресурсу, перегрузкам и другим параметрам эксплуатации.
Одно из отличий электропривода ПЦР-У от прототипа - в отсутствии быстроходных подшипников легкой и средней серии блока сателлитов за счет увеличения редукции вращения и уменьшения скорости вращения сателлита 8 на игольчатых подшипниках 6 по фиг.2, 3 и подвижных частей ПЦР-У.
Промышленность в совершенстве отработала металлургию и изготовление (волочение, навивку, упрочение, термообработку, химополирование и т.п.) пружин с одновременным упрочением исходного материала. Прочность высокопрочной пружинной ленты, проволоки [2, 7, 8] после патентирования, волочения, дробеструйной и термических обработок достигает σв=182-257 кг/мм2.
Упругодеформируемое эластичное зацепление в электроприводе ПЦР-У реализует обратную связь по нагрузке и обеспечивает работоспособность конструкции в экстремальных условиях эксплуатации.
Прецизионный, упругодеформируемый, эластичный характер зацепления редуктора ПЦР-У открывает весьма широкие перспективы внедрения в них пластических масс, металлокерамических, композиционных материалов и шин с металлическим кордом. Это особенно актуально, поскольку значительное число электроприводов и передач эксплуатируется в строго планируемое время - сутки, часы. Это аппараты, работающие в космосе, при различном ориентировании их в пространстве, навигационных системах по исследованию планет, спутников, агрессивных сред, приводы раскрытия радиоантенн, панелей солнечных батарей, забора грунта и т.п.
В этих условиях габариты, масса, необходимый ресурс, себестоимость производства являются определяющими. Объединение эффективных принципов построения конструкции электроприводов ПЦР-У с изготовлением сателлита 8 по фиг.4, 6 в виде автопокрышки по заводской технологии и основных деталей из химически стойких композиционных материалов крайне необходимо при работе в космосе, в агрессивных и ударных средах, химической промышленности, системах, подверженных воздействию электромагнитного импульса и радиации.
Однако этому препятствует значительное замедление экспериментальных исследований электроприводов с ЦВМ и сокращение их производства.
Многопарное зацепление ПЦР-У позволяет эффективно использовать в конструкции гипоциклоидальное (эпициклоидальное), оболочковое, кордорезиновое, металлорезиновое зацепления, которые отличаются прочностью, особенно при толчках и ударных нагрузках, значительным уменьшением массы, экономичной технологией и расходованием материалов, что важно для высокомоментных редукторов оборонной авиационной и космической техники.
Предлагаемые подобные электроприводы и планетарные циклоидальные редукторы изготовлены и защищены патентами [2, 3, 4. 5. 6, 10] и являются основой для их внедрения в специальные надежные безлюфтовые и бесшумные системы управления и регулирования в наземной, космической, авиационной, гироскопической, подводной навигациях, для робототехнических и кибернетических устройств и аппаратов. К тому же они малогабаритны, автономны, компактны и могут работать в ограниченных условиях. Они также могут быть использованы в системах перемещения звеньев промышленных роботов. Высокие технические характеристики электроприводов с ПЦР-У позволяют использовать их также для токарных, фрезерных и шлифовальных станков с программным управлением, для радиолокационных станций и антенн, для наблюдения за спутниками Земли, радиотелеметрических систем, в авиации, автотранспорте (электромобилях), в химической и нефтяной промышленности, в подвижных ветроэлектрических станциях, обслуживающих геологические и войсковые части.
Как показывают наши исследования, для уже планируемого внедрения предлагаемого эффективного электропривода ПЦР-У в производство достаточно разработанной нами точной технологии производства, как наиболее эффективной и экономичной.
Значительная экономичность электропривода ПЦР-У достигается реализацией его на базе существующих шарикоподшипниковых, шинных и автотехнических производств, в основе которых преобладают сборочные процессы, без применения дорогостоящего координатно-расточного, зубодолбежного и зубофрезерного оборудования. Общие производственные и технологические затраты при этом снижаются примерно в 5 раз.
Экологически чистые производство, энергосбережение, безотходность и экономическая эффективность изготовления и эксплуатации позволяют использовать законы эластичной механики, по результатам внедрения предлагаемых электроприводов ПЦР-У, в эффективное перспективное направление в редукторостроении.
Весьма новым и оригинальным в конструкции малогабаритного электропривода ПЦР-У служит применение в нем нового программируемого двухстороннего малогабаритного упругодеформируемого зубчатого зацепления с прецизионным упругим пружинным сателлитом 5 по фиг.5 и тороидальных витых пружин, а также витых роликов центральных колес [2÷6]. Конструкция данного малогабаритного электропривода - М ЭП ПЦР-У по своей компактности, автономности, при меньших габаритах и массе чрезвычайно ценна при ограниченных размерах приборных отсеков подводных лодок, вертолетов, авиационной и космической техники, с учетом безлюфтового, бесшумного прецизионного характера эксплуатации, без проскальзывания и потери информации, в экстремальных условиях.
Конструкция М ЭП ПЦР-У позволяет в процессе эксплуатации изменять угловой эксцентриситет - α, что позволяет регулировать в широком диапазоне зону эластичного зацепления сателлита с центральными пружинными колесами и тем самым регулировать передачу значительных рабочих моментов, мощностей с минимальными потерями.
Простота конструкции М ЭП ПЦР-У, высокая экономичность обеспечивают ее быструю реализацию при высоких характеристиках надежности, ресурса работы, КПД, технологичности производства (химополирование зубчатого пружинного зацепления).
Передаточное отношение ЭП ПЦР-У, М ЭП ПЦР-У достигает значительных величин (i≥10÷1000), может быть и дробным. У прототипа при низком КПД предел передаточных отношений ограничен [1, 2].
Передаточные отношения i электропривода по фиг.2 определяются зависимостью по модулю:
 ,
,
где Zf - число зубьев 7 левой части упругого сателлита 8;
Za - число зубьев 15 подвижного центрального колеса 11
Zb - число зубьев 1 неподвижного центрального колеса 2;
Zq - число зубьев 9 правой части упругого сателлита 8.
Из условий работы М ЭП ПЦР-У в звене управления полетом объекта, работающего в режиме поиска и в режиме точного определения положения и координат исследуемой цели, электропривод по фиг.5 работоспособен в обоих режимах. Исходя из условий режима поиска, малогабаритный электропривод включен в управление от обычного электродвигателя ЭД 11 по фиг.5. В режиме точного определения положения и координат цели данный электропривод переходит на дискретный прецизионный характер управления, и на его шестисекционную электрообмотку 3 по фиг.5 (по 3-х фазной схеме) подаются управляющие токовые импульсы от дискретного блока управления или от ЦВМ.
В этом режиме дискретное вращающееся электромагнитное поле обмотки 3 и магнитопровода пружинного эластичного зацепления неподвижной центральной шестерни 4 и сателлита 5 преобразуется в дискретное обкатывание левой части магнитопровода пружинного сателлита 5 по шестерне 4. Одновременно эти вращения (обкатывания) сателлита 5 (его правой пружинной части) преобразуются в дискретные вращения пружинной магнитопроводящей шестерни 7, т.е. во вращение выходного вала 9. Вращение выходного вала 9 М ЭП ПЦР-У происходит со значительным силовым усилением за счет его высокого передаточного отношения
iМ ЭП ПЦР-У = iЛ.ЧАСТИ · iПР.ЧАСТИ, (iМ ЭП ПЦР-У≥100).
Так, в левой части (iЛ.ЧАСТИ) пружинного эластичного зацепления число вогнутых впадин левой части сателлита 5 (Zf) на единицу больше числа выпуклых профилей (зубьев) пружинного колеса 4 (Zb), а число зубьев в правой части сателлита (Zq) на единицу больше числа выпуклых зубьев подвижной шестерни (Za). В этих условиях общее передаточное отношение данного электропривода по фиг.5 составляет:

где Z4=Zb=19, Z7=Za=20, ZЛ.САТ=Zf=20, ZПР.САТ=Zq=21.
При этом двухсторонне вогнутое зацепление сбалансированного сателлита по фиг.5 вид А с выпуклым профилем центральных шестерен электропривода выполнено по скользящей посадке центральным, самоопределяющим, самоорганизующим [7, с.1165; 8, с.437; 9] с оптимальным и объемным действием сил [7, 8, 9]. Поскольку взаимодействие всех магнитопроводов сателлита и центральных колес в их пружинном зацеплении происходит постоянно и без воздушных зазоров, то и магнитное их взаимодействие осуществляется по замкнутой магнитной цепи [8, с.268].
Особенностью всех конструкций электроприводов ПЦР-У является их способность гарантированно сохранять отработанные командные сигналы (импульсы) и в перерывах между командами не потреблять электроэнергию.
Энергосберегающий электропривод с высоким КПД (≥95%) ценен и незаменим в агрегатах с автономными источниками питания: в летательных аппаратах, в подводной и космической средствах навигации, в роботах и в передачах в герметическую среду через герметический сильфон.
На базе предлагаемого электропривода обеспечены высокая надежность, долговечность, меньшие потери на трение, лучшие виброакустические и массогабаритные характеристики, перегрузочные способности, резервирование элементов, узлов и агрегатов, что в существующих приводах невозможно. Электроприводы ПЦР-У способны учитывать случайный характер активной силовой нагрузки, приспосабливаться, т.е. демпфировать ударные, вибрационные, космические, радиационные, электромагнитные, абразивные, подводные нагрузки или их совокупность [7, 8, 9].
Большой коэффициент перекрытия зубчатых зацеплений редуктора электропривода обеспечивает его высокую кинематическую точность, плавную, без проскальзывания, безлюфтовую, бесшумную работу электропривода, что ценно для оборонных и научных целей. Его безотказная работа обеспечивается эластичными (в виде резиновых с металлическим кордом), пружинными компенсаторами в виде витых двойных пружин, упругодеформируемых витых роликов и сателлитов-пружин, которые за счет многопарности в зацеплениях увеличивают передаваемые электроприводом моменты и усилия при перегрузках.
Химополирование зацепления пружин роликов сателлитов снижает трение, увеличивает коррозионную стойкость зацепления [4, 5, 7, 8] и КПД электропривода. На основе опыта работы ряда НИИ РФ в качестве материала для пружинного зацепления можно рекомендовать стали ШХ15, ШХ9, 12ХН3А и другие стали для сателлитов, а также резиновые покрышки существующей автотехники.
Конструкция электропривода предусматривает в процессе эксплуатации переключение скоростей на выходе редуктора за счет изменения работы шестерни 2 по фиг.2 при переключении ее из неподвижного режима в режим частично подвижный. Переключение скоростей возможно как электрическое, так и механическое.
Новым и оригинальным в электроприводе представлены двойные сборные пружины 17 и 18 по фиг.2, у которых наружная пружина 17 с напряжением навернута и расположена на внутренней пружине 18; вся сборка двойных пружин расположена на осях 14 и обеспечивает безлюфтовую, объемную и продольную деформацию общей сборки пружин в процессе работы, повышая тем самым нагрузочную способность и ресурс работы электропривода.
Упругодеформируемое зацепление электропривода с упругим эластичным сателлитом реализует обратную связь по нагрузке и обеспечивает его работоспособность в экстремальных условиях эксплуатации и перегрузок, при использовании упругих эластичных пружинных эластичных колес и сателлитов в виде готовых витых роликов и автопокрышек по фиг.4, 5, 6.
Сопряжение электропривода ПЦР-У с силовым электронным управлением на базе ЦВМ позволит значительно повысить эффективность и быстродействие электроприводов во всех названных ранее системах управления и по исследованию полетов НЛО и других космических аппаратов.
Именно наличие зазоров и люфтов в зацеплении большинства обычных редукторов и прототипов является причиной ударного характера их работы, приводящих к механическим поломкам и разрушению зубьев и привода в целом.
Конструкция ЭП ПЦР-У характеризуется также экологической чистотой ее производства и эксплуатации, энергосбережением, безотходностью, экономичностью изготовления.
Преимущества электропривода ПЦР-У позволяют рекомендовать его для силового привода тележки (самоходное шасси, мотор-колесо) по исследованию Луны, Марса и планет космоса. Так, в опытном макете тележки в каждом из 4-х колес смонтирован электропривод постоянного тока типа ПЦР-У, чем достигается автономность работы каждого колеса и защита тележки от воздействия космоса.
Для исследования электроприводов ПЦР-У, М ПЦР-У тороидальные и двойные пружины, пружинные сателлиты и бочкообразные витые ролики целесообразно изготавливать как навивкой, так и по технологии точного прессования, литья, порошковой металлургии из различных материалов и их композиций. Для корпусных агрегатов рекомендуются сплавы Д16Т, В95Т и другие, а также пластмассы типа АГ-4С и т.п.
Выводы. Изобретения ЭП ПЦР-У, М ЭП ПЦР-У обладают упругодеформируемым, многопарным, прецизионным, безлюфтовым и бесшумным характером зацепления, обеспечивающим передачу в широком диапазоне значительных моментов и мощностей с высокой надежностью, большим ресурсом при перегрузках и с КПД ≥95%.
Данные электроприводы ценны использованием в них апробированных производственных технологий в изготовлении и использовании готовых пружин, витых роликов, автопокрышек в его эластичных, эффективных и оптимальных видах зацеплений.
Данный электропривод целесообразно использовать в высокоточных, безлюфтовых и бесшумных передачах, в системах навигаций, наземном (электромобилях), авиационном и подводном транспорте, в системах регулирования и управления приборами кибернетики и робототехники, нефтегазовой промышленности, станкостроении и других областях науки и техники.
Источники информации
1. Патенты Франции (Pat. №1440594, 1966; №1452099, 1966; №1477772, 1967), США (Pat. №32589994, 1966) ЕР 0286760 А1 19.10.1988).
2. Яковлев А.Ф. и др. Планерный циклоидальный редуктор. Патент №1802958 по заявке 4854625/28 от 27.07.1990 г.
3. Яковлев А.Ф. и др. Планерный циклоидальный редуктор. Патент №RU 2059131 от 07.04.1993 по заявке 93-018248/28/017813.
4. Соловцов Н.Е., Яковлев А.Ф. Планерный циклоидальный редуктор. Патент №2153613 от 27.07.2000 г.
5. Соловцов Н.Е., Яковлев А.Ф. Электропривод с планетарным циклоидальным редуктором. Патент №2206805 от 20.06.2003 г.
6. Кириллов Ю.Ф., Яковлев А.Ф. Планерный циклоидальный редуктор повышенной мощности. Патент №2251038 от 27.04.2005 г.
7. Советский энциклопедический словарь. Гл. ред. A.M.Прохоров. - М.: Совет. энциклопедия, 1987, с.915, 933, 1165, 1475.
8. Политехнический словарь. Гл. ред. И.И.Артоболевский. - М.: Совет. энциклоиедия, 1977, с.268, 295, 323, 330, 437, 552.
9. Николис Г., Пригожин И. Самоорганизация в неравновесных системах, перев. с англ. - М., 1979 г., с.
10. Кириллов Ю.Ф., Яковлев А.Ф. и др. Электропривод с редуктором повышенной эффективности варианты), решения о выдачи патента, ном. вх. №4/558 от 9.06.2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - ПЭ ПЦР | 2011 |
|
RU2506685C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ЭЛЕКТРОПРИВОДОВ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - МКЭ ПЦР | 2008 |
|
RU2452883C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР ПОВЫШЕННОЙ МОЩНОСТИ ПЦР ПМ | 2003 |
|
RU2251038C2 |
| ПЕРЕДАЧА С ОБЪЕМНО-ПРОСТРАНСТВЕННЫМ ЗАЦЕПЛЕНИЕМ-ПОПЗ | 2012 |
|
RU2533761C2 |
| ЭЛЕКТРОПРИВОД С РЕДУКТОРОМ ПОВЫШЕННОЙ ЭФФЕКТИВНОСТИ (ВАРИАНТЫ) | 2005 |
|
RU2312260C2 |
| Планетарный прецессионный редуктор | 1991 |
|
SU1825914A1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| ЭЛЕКТРОПРИВОД С ПЛАНЕТАРНЫМ ЦИКЛОИДАЛЬНЫМ РЕДУКТОРОМ | 2000 |
|
RU2206805C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2003 |
|
RU2273777C2 |
Изобретение относится к области электротехники, в частности к мотор-редукторам, электроприводам, и может быть использовано в прецизионных приводах роботов и манипуляторов, в наземной и космической навигациях, в станкостроении, на транспорте, в нефтегазовой промышленности и т.п. Электропривод на базе планетарного циклоидального редуктора с упругим зацеплением содержит электромотор, редуктор, закрепленный на валу электромотора и через подшипники редуктора передающий вращение на выходной вал. Согласно первому варианту осуществления изобретения, редуктор электропривода выполнен с центральным расположением упругого эластичного зацепления между эластичным сателлитом и центральными колесами, что обеспечивает их безлюфтовую, бесшумную, оптимальную работу и эксплуатацию. При управлении электропривода от электродвигателя (электромотора) непрерывного или дискретного действия, упругие круговинтовые зацепления эластичного сателлита и пружинных роликов находятся в постоянном центральном, оптимально самоприспосабливающемся зацеплении. По второму варианту электропривод выполнен с планетарным циклоидальным редуктором, а выходной вал электродвигателя выполнен в виде пружинного ротора и соединен с выходным валом редуктора, сателлит которого находится в постоянном центральном зацеплении по скользящей посадке с магнитопроводящим выпуклым профилем центральных колес. При этом магнитное взаимодействие упругого пружинного сателлита и пружин центральных колес выполнено по замкнутой магнитной цепи без воздушного зазора. Электропривод выполнен с работой как от непрерывного управления от электродвигателя, так и от дискретного в виде электрических импульсов от блока управления или от ЦВМ. Технический результат, достигаемый в обоих вариантах, состоит в том, что вращение ротора электропривода преобразуется со значительным усилением по моментам и мощностям в безлюфтовое и бесшумное вращение выходного вала. Такое выполнение электропривода на базе планетарного циклоидального редуктора с упругим зацеплением позволяет значительно улучшить его технико-экономические параметры. 2 н. и 5 з.п. ф-лы, 7 ил.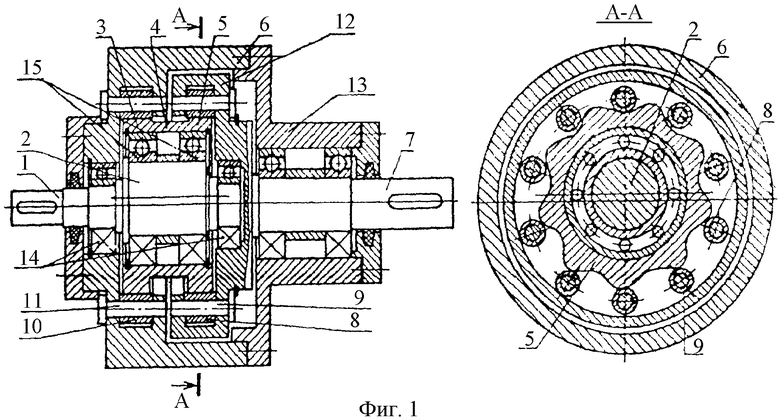
1. Электропривод с редуктором, содержащий корпус с крышкой, электродвигатель, закрепленный через подшипники на валу, связанный с редуктором и передающий через него вращение от электродвигателя на выходной вал, отличающийся тем, что редуктор выполнен планетарным циклоидальным с упругим зацеплением, включает неподвижное и подвижное центральные колеса и упругий эластичный сателлит, который изготовлен из резины с металлическим или тканевым кордом, или в виде тороидальной витой пружины, по периферии упомянутого сателлита выполнены зубья циклоидального зацепления при разности в один зуб в числе зубьев левой и правой части сателлита, а зубья неподвижного и подвижного центральных колес упомянутого редуктора выполнены в виде бочкообразных витых стальных роликов, или сдвоенных пружин, или тороидальных витых пружин, повторяющих профиль впадин зубьев упругого эластичного сателлита.
2. Электропривод по п.1, отличающийся тем, что упругий эластичный сателлит редуктора выполнен из готовой автопокрышки с доработкой впадин между зубьями на протекторе автопокрышки с сохранением числа и формы зубьев упругого эластичного сателлита, в зацеплении с которыми находятся упомянутые зубья центральных колес редуктора, выполненные в виде бочкообразных витых стальных роликов или сдвоенных пружин.
3. Электропривод по п.1, отличающийся тем, что тороидальная витая пружина упругого эластичного сателлита редуктора выполнена сваренной в общую конструкцию, образующую тор, имеющий по боковой периферии вогнутые профилированные зубья, входящие в зацепление с круглыми выпуклыми упругодеформируемыми зубьями неподвижного и подвижного центральных колес редуктора, при этом упомянутый упругий эластичный сателлит изготовлен на специальной оправке так, что его левая часть имеет одно число зубьев Zf, а правая часть - число зубьев Zg, и их разность составляет единицу, при этом упругий эластичный сателлит установлен и закреплен на основании углового эксцентрика с угловым эксцентриситетом α, сбалансирован и соединен через подшипники с выходным валом редуктора.
4. Электропривод по п.1, отличающийся тем, что редуктор электропривода содержит круговинтовой герметичный сильфон в соединении электропривода, что позволяет передавать усилия и моменты в герметичное пространство.
5. Электропривод по п.1, отличающийся тем, что неподвижное центральное колесо редуктора выполнено с числом зубьев Zb и расположенной на нем шестисекционной электрообмоткой, которая при электрическом переключении обеспечивает переход режима управления электроприводом с непрерывного на дискретный за счет переключения электрообмотки на дискретное управление от электронного блока управления или ЦВМ для реализации ступеней по скорости электропривода при его эксплуатации.
6. Электропривод с редуктором, содержащий корпус с крышкой, электродвигатель, закрепленный через подшипники на валу, связанный с редуктором и передающий через него вращение от электродвигателя на выходной вал, отличающийся тем, что редуктор выполнен планетарным циклоидальным, а выходной вал электродвигателя выполнен в виде пружинного ротора и соединен с входным валом упомянутого редуктора, при этом передаточное отношение электропривода определяется произведением передаточного отношения электродвигателя на передаточное отношение редуктора, что обеспечивает усиление передаточного момента, передаваемого на нагрузку на один-два порядка.
7. Электропривод по п.6, отличающийся тем, что в его корпусе установлена кольцевая шестисекционная электрообмотка, которая обеспечивает дискретное ее управление электроимпульсами с преобразованием их в синхронные прецизионные вращения выходного вала, а сателлит упомянутого редуктора выполнен упругим пружинным и сбалансирован, при этом магнитопроводы упругого пружинного сателлита и пружин центральных колес упомянутого редуктора выполнены с зацеплением по скользящей посадке по замкнутой магнитной цепи без воздушного зазора с обеспечением расположения упругого пружинного сателлита центрально и оптимально самоприспосабливающимся к объемным силам магнитного взаимодействия.
| ЭЛЕКТРОПРИВОД С ПЛАНЕТАРНЫМ ЦИКЛОИДАЛЬНЫМ РЕДУКТОРОМ | 2000 |
|
RU2206805C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР ПОВЫШЕННОЙ МОЩНОСТИ ПЦР ПМ | 2003 |
|
RU2251038C2 |
| СПОСОБ УСТРАНЕНИЯ ДЕФЕКТОВ РАДУЖНОЙ ОБОЛОЧКИ | 1999 |
|
RU2156613C1 |
| RU 2059131 С1, 27.04.1996 | |||
| Планетарный прецессионный редуктор | 1991 |
|
SU1825914A1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР | 2005 |
|
RU2294587C1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| Устройство для гидростатического прессования | 1987 |
|
SU1440594A1 |
| FR 1452099 А1, 14.12.1966 | |||
| Жаростойкая сталь | 1987 |
|
SU1477772A1 |
| US 32589994 А, 05.07.1966 | |||
| Устройство для циркуляционного вакуумирования жидкого металла | 1968 |
|
SU286760A1 |
| US 3946621 А, 30.03.1970. | |||

