Изобретение относится к медицинскому приборостроению, а именно к устройствам для регистрации биоэлектрических потенциалов с передачей информации в ЭВМ в реальном времени с целью отображения, хранения, постановки диагноза и т.д.
Известно устройство для съема и регистрации электрофизиологических сигналов (авт. св. 2175212, кл. А 61 В 5/04, 5/0205, "Телеметрический комплекс для контроля и диагностики функционального состояния человека"). Однако применяемые в устройстве схемы подавления дрейфа изолинии искажают низкие частоты регистрируемого сигнала, которым в настоящее время придают большое диагностическое значение, в частности при регистрации электрокардиосигналов. Кроме того, применение времяимпульсных модуляторов и демодуляторов приводит к дополнительным погрешностям при необходимости ввода регистрируемых сигналов в ЭВМ, а импульсные помехи в канале связи могут привести к потере не только одного отсчета, но и всего информационного кадра, причем появление такой помехи сложно поддается определению.
Технической задачей изобретения является повышение точности телеметрической регистрации биопотенциалов с учетом ограниченности динамического диапазона измерительного тракта и наличием помех в канале связи путем гибкой компенсации возможного дрейфа изолинии, а также путем выбора способа кодирования передаваемых данных. При этом накладываются условия миниатюризации подвижного модуля и допустимого энергопотребления от автономного источника питания.
Поставленная задача решается посредством того, что в устройство, содержащее электроды и экранированный кабель, два измерительных канала, содержащие последовательно соединенные инструментальный усилитель, фильтр нижних частот (ФНЧ), масштабирующий усилитель, причем первый электрод соединен посредством кабеля с первым входом инструментального усилителя первого канала, второй электрод соединен посредством кабеля со вторым входом инструментального усилителя первого канала и первым входом инструментального усилителя второго канала, а третий электрод посредством кабеля соединен со вторым входом инструментального усилителя второго канала, повторитель, вход которого соединен со вторым выходом инструментального усилителя первого канала, на котором поддерживается напряжение, пропорциональное синфазному сигналу на входах этого инструментального усилителя, а выход повторителя соединен с экраном кабеля, инвертирующий усилитель, вход которого соединен с выходом повторителя, а выход посредством кабеля соединен с нулевым электродом, дополнительно введен универсальный микроконтроллер с двумя аналогово-цифровыми преобразователями (АЦП), двумя цифроаналоговыми преобразователями (ЦАП) и одним универсальным асинхронным приемопередатчиком (УАПП), причем вход первого АЦП микроконтроллера соединен с выходом масштабирующего усилителя первого канала, вход второго АЦП микроконтроллера соединен с выходом масштабирующего усилителя второго канала, в каждый измерительный канал введена обратная связь, реализованная путем второго в канале масштабирующего усилителя, вход которого соединен с выходом соответствующего ЦАП микроконтроллера, а выход - с входом корректировки постоянного выходного уровня соответствующего инструментального усилителя, первый импульсно-кодовый преобразователь (ИКП), модулирующий вход которого подключен к выходу УАПП микроконтроллера, а демодулирующий выход подключен к входу УАПП микроконтроллера, первый инфракрасный (ИК) приемопередатчик, электрический вход и выход которого соединены соответственно с модулирующим выходом и демодулирующим входом первого ИКП, второй ИК приемопередатчик, оптически связанный с первым, второй ИКП демодулирующий вход которого подключен к электрическому выходу второго ИК приемопередатчика, а модулирующий выход подключен к электрическому входу второго ИК приемопередатчика, конвертор уровня, вход и выход уровня транзисторно-транзисторной логики которого соединены соответственно с демодулирующим выходом и модулирующим входом второго ИКП, а входы-выходы уровня RS-232C соединены с последовательным асинхронным портом электронно-вычислительной машины (ЭВМ).
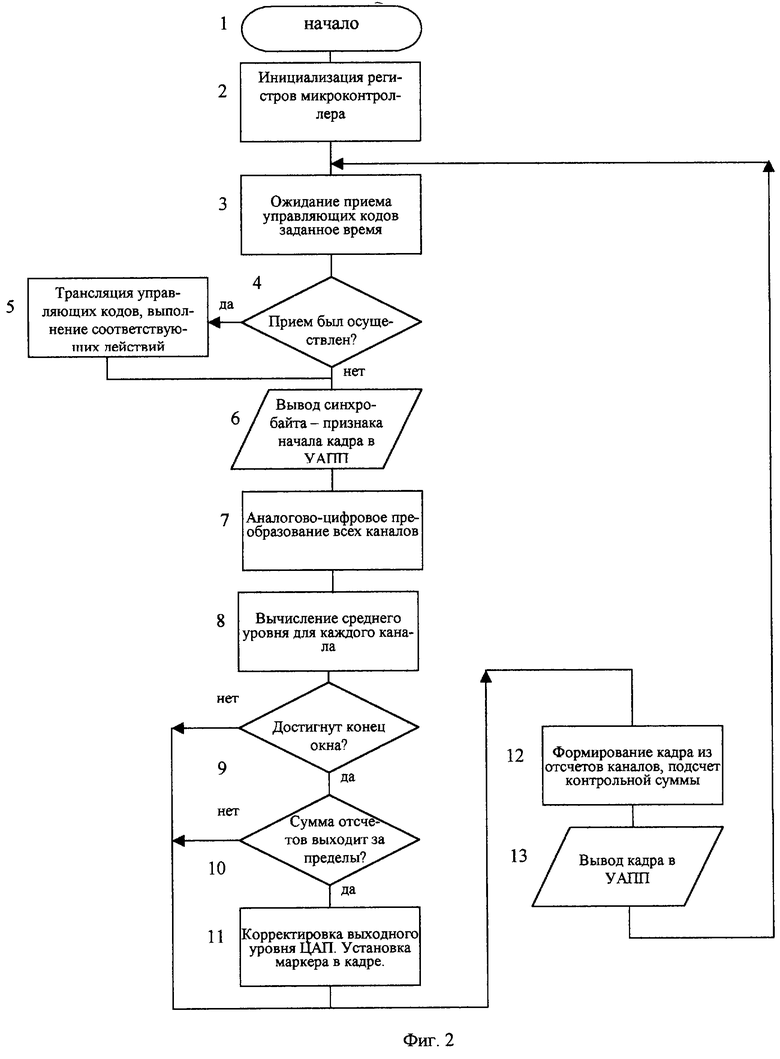
На фиг. 1 представлена структурная схема устройства; на фиг.2 - схема алгоритма программы микроконтроллера.
Устройство (фиг. 1) состоит из двух модулей - подвижного с автономным источником питания и стационарного, который включает в себя ЭВМ. Подвижный модуль содержит электроды 1, подключенные к экранированному кабелю 2, два измерительных канала, первый из которых содержит последовательно соединенные инструментальный усилитель 3, фильтр нижних частот 4, масштабирующий усилитель 5, а второй - последовательно соединенные инструментальный усилитель 9, фильтр нижних частот 10, масштабирующий усилитель 11, причем первый электрод соединен посредством кабеля 2 с первым входом инструментального усилителя 3, второй электрод соединен посредством кабеля 2 со вторым входом инструментального усилителя 3 и первым входом инструментального усилителя 9, а третий электрод посредством кабеля соединен со вторым входом инструментального усилителя 9, повторитель 6, вход которого соединен со вторым выходом инструментального усилителя 3, на котором поддерживается напряжение, пропорциональное синфазному сигналу на входах этого инструментального усилителя, а выход повторителя 6 соединен с экраном кабеля 2, инвертирующий усилитель 7, вход которого соединен с выходом повторителя 6, а выход посредством кабеля 2 соединен с нулевым электродом. Вход первого АЦП микроконтроллера 8 соединен с выходом масштабирующего усилителя 5, вход второго АЦП микроконтроллера 8 соединен с выходом масштабирующего усилителя 11. В каждый измерительный канал введена обратная связь, реализованная путем масштабирующих усилителей ЦАП 14 и 15 для первого и второго канала соответственно, вход которых соединен соответственно с первым и вторым выходом ЦАП микроконтроллера 8, а выходы - с входом корректировки постоянного выходного уровня соответственно инструментального усилителя 3 и инструментального усилителя 9. Модулирующий вход ИКП 12 подключен к выходу УАПП микроконтроллера 8, а демодулирующий выход ИКП 12 подключен к входу УАПП микроконтроллера 8. Электрический вход и выход первого ИК приемопередатчика 13 соединены соответственно с модулирующим выходом и демодулирующим входом ИКП 12.
Стационарный модуль состоит из ИК приемопередатчика 16, оптически связанного с ИК приемопередатчиком 13, ИКП 17, демодулирующий вход которого подключен к электрическому выходу ИК приемопередатчика 16, а модулирующий выход подключен к электрическому входу ИК приемопередатчика 16, конвертора уровня 18, вход и выход уровня транзисторно-транзисторной логики которого соединены соответственно с демодулирующим выходом и модулирующим входом ИКП 17, а входы-выходы уровня RS-232С соединены с последовательным асинхронным портом ЭВМ 19.
Устройство работает следующим образом.
В устройстве предусмотрены два канала регистрации данных. В первом канале биопотенциалы, снимаемые электродами 1, по экранируемому кабелю 2 передаются в инструментальный усилитель 3, который усиливает разность между двумя биопотенциалами. Между двумя резисторами, которые задают коэффициент усиления инструментального усилителя 3, образуется потенциал полусуммы двух входных напряжений. Он подается через повторитель 6 на экран кабеля 2, компенсируя тем самым паразитное влияние погонной емкости кабеля. Далее полусумма входных потенциалов (синфазная помеха) усиливается инвертирующим усилителем 7 и в противофазе подается через кабель 2 на нулевой электрод. В результате получается отрицательная обратная связь по синфазной помехе, что позволяет дополнительно в несколько раз подавить эту помеху. С выхода инструментального усилителя 3 усиленный сигнал подается на ФНЧ 4, который ограничивает сверху частотный диапазон пропускаемого сигнала, подавляя тем самым высокочастотные помехи. Постоянная времени этой цепи выбирается в зависимости от цели регистрации биопотенциалов. Так, для ЭКГ высокого разрешения частота среза может быть выбрана равной от 0,5 до 1 кГц. Далее диапазон отфильтрованного сигнала согласуется с входным диапазоном АЦП микроконтроллера 8 при помощи масштабирующего усилителя 5. Во втором канале биопотенциалы передаются в инструментальный усилитель 9, который усиливает разность между двумя другими биопотенциалами. С выхода инструментального усилителя 9 усиленный сигнал подается на ФНЧ 10, который подавляет высокочастотные помехи. Далее диапазон отфильтрованного сигнала согласуется с входным диапазоном АЦП микроконтроллера 8 при помощи масштабирующего усилителя 11.
Микроконтроллер 8 производит аналогово-цифровое преобразование каждого канала, формирование кадра из полученных отсчетов, преобразование параллельного представления двоичных данных в асинхронное последовательное при помощи встроенного УАПП, анализ средневзвешенного значения в окне заданной длины для каждого канала. Если средневзвешенное значение не находится в заданном диапазоне, что будет наблюдаться при наличии квазистационарных и стационарных помех (дрейфа изолинии), то микроконтроллер 8 в момент времени to формирует скачкообразное компенсирующее напряжение на соответствующем выходе ЦАП вида - A*1(t-to), где А - множитель, пропорциональный средневзвешенному значению, a 1(t) - единичная ступенчатая функция. Это компенсирующее напряжение через масштабирующий усилитель ЦАП 14 (при детектировании дрейфа нуля в первом канале) или через масштабирующий усилитель ЦАП 15 (при детектировании дрейфа нуля во втором канале) передается на вход корректировки постоянного выходного уровня инструментального усилителя 3 или инструментального усилителя 9 соответственно. В выходном кадре микроконтроллер 8 устанавливает маркеры (флаги) в поле служебных битов. Наличие этих маркеров позволяет ЭВМ 19 исключить из автоматического анализа артефактные комплексы, а также визуализировать получаемый сигнал с соответствующими пометками для облегчения анализа данных человеком. Если средневзвешенное значение находится в заданном диапазоне, что будет наблюдаться при отсутствии квазистационарных и стационарных помех (дрейфа изолинии), то корректировка среднего уровня осуществляться не будет, сигнал будет регистрироваться без искажений нижних частот, так как в измерительном тракте в этом случае не будет цепей, изменяющих соотношения между низкими частотами. В этом есть суть гибкой компенсации в том смысле, что установившимся процессом в данном контексте считается сигнал без дрейфа изолинии, а переходным процессом - сигнал с дрейфом изолинии.
После формирования кадра данных, который содержит признак начала кадра (синхробайт), результаты аналогово-цифрового преобразования всех каналов, поле служебных битов, где передаются маркеры компенсации дрейфа изолинии и контрольная сумма кадра, микроконтроллер 8 через выход УАПП передает кадр в последовательном асинхронном виде на модулирующий вход импульсно-кодового преобразователя (ИКП) 12. ИКП 12 кодирует каждый поступающий нулевой бит асинхронной последовательной посылки коротким импульсом, а каждый единичный бит - отсутствием импульса, т.е. работает в режиме IrDA, рекомендованном Ассоциацией по инфракрасной передачи данных. Именно такой режим передачи данных обеспечивает наибольшую помехозащищенность, гарантируя, что при импульсной помехе может потеряться информация в количестве минимум от одного бита, максимум до нескольких байтов (в зависимости от локализации импульсной помехи и от плотности передаваемого потока данных). Выходные импульсы ИКП 12 излучаются в пространство инфракрасным приемопередатчиком 13. Применение инфракрасного канала передачи данных с учетом того, что подвижный модуль питается от автономного источника питания, позволяет добиться надежной гальванической развязки биообъекта от электрических сетей.
В стационарном модуле излучаемые блоком 13 импульсы детектируются ИК приемопередатчиком 16. Далее импульсы попадают на демодулирующий вход ИКП 17, где они преобразуются в асинхронную последовательность нулей и единиц. После согласования уровня при помощи конвертора уровня 18 эта последовательность передается на вход последовательного асинхронного СОМ-порта ЭВМ 19, работающего в режиме RS-232С, которым оснащены практически все ЭВМ. ЭВМ 19 осуществляет управление работой микроконтроллера 8 при помощи аналогичного обратного канала связи: с СОМ-порта через конвертор уровня 18 асинхронная последовательность кодируется ИКП 17, импульсы излучаются приемопередатчиком 16, далее детектируются приемопередатчиком 13 и передаются на демодулирующий вход ИКП 12, где импульсы преобразуются в асинхронную последовательность и затем поступают на вход УАПП микроконтроллера 8. Обмен данными происходит в полудуплексном режиме.
Работа устройства происходит под управлением программных модулей, часть которых хранится в микроконтроллере 8, а часть в ЭВМ 19. Микроконтроллер 8 начинает выполнять программу, алгоритм которой представлен на фиг.2, после включения автономного источника питания. После инициализации регистров (блок 2, фиг.2) микроконтроллер переходит в режим ожидания приема управляющих кодов от ЭВМ 19 (блок 3, фиг.2). После заданного времени ожидания при наличии управляющего кода происходит его трансляция (блок 5, фиг.2) и выполнение определенных действий, соответствующих значению управляющего кода. Далее происходит вывод синхробайта - признака начала кадра в УАПП (блок 6, фиг.2). После аналогово-цифрового преобразования всех каналов (блок 7, фиг.2) выполняется процедура вычисления среднего уровня для каждого канала в заданном окне (блоки 8, 9, фиг.2). После вычисления среднего уровня происходит его проверка на принадлежность заданному диапазону (блок 10, фиг.2). Если средневзвешенное значение какого-нибудь канала выходит за пределы, что означает наличие квазистационарных и стационарных помех (дрейфа изолинии), то происходит корректировка выходного уровня соответствующего ЦАП, а в служебном поле выходного кадра устанавливается соответствующий каналу маркер компенсации дрейфа изолинии (блок 11, фиг.2). Далее, а также в случае отсутствия дрейфа изолинии или не законченности процесса вычисления средневзвешенного значения, формируется информационное поле кадра из отсчетов каналов (блок 12, фиг.2), вычисляется контрольная сумма кадра, а затем кадр побайтно выводится в УАПП (блок 13, фиг.2). Весь процесс зацикливается до тех пор, пока не поступит соответствующий код управления из ЭВМ 19.
Программный модуль, хранящийся в ЭВМ 19, обеспечивает управление микроконтроллером 8, регистрацию, хранение, визуализацию данных и маркеров компенсации дрейфа изолинии, анализ контрольной суммы кадра, а также автоматический анализ регистрируемых сигналов. Контрольная сумма кадра позволяет детектировать ошибки приема данных, которые могут иметь место при появлении импульсных помех в канале связи.
Таким образом, применение однокристальной микросхемы универсального микроконтроллера позволяет добиться повышения точности регистрации биопотенциалов путем гибкой компенсации возможного дрейфа изолинии, а также миниатюризации прибора и допустимого энергопотребления подвижного модуля от автономного источника питания за счет того, что один кристалл высокой степени интеграции выполняет функции аналогового мультиплексора, аналогово-цифрового преобразователя, анализатора наличия дрейфа изолинии, формирователя компенсирующего напряжения, преобразователя параллельного кода в асинхронный последовательный код, формирователя контрольной суммы кадра и маркеров компенсации. Выбор способа модулирования передаваемых данных позволяет организовать помехоустойчивую многоканальную передачу со служебным полем маркеров компенсации и контрольной суммы кадра в реальном времени. Маркеры компенсации позволяют ЭВМ исключить из автоматического анализа артефактные комплексы, а также визуализировать получаемый сигнал с соответствующими пометками для облегчения анализа данных человеком. Контрольная сумма кадра позволяет детектировать ошибки приема данных, которые могут возникать при появлении импульсных помех в канале связи. Отсутствие в телеметрической системе регистрации биопотенциалов между биообъектом и аналогово-цифровым преобразователем дополнительных модуляторов и демодуляторов позволяет дополнительно повысить точность измерения при вводе данных в ЭВМ для дальнейшей обработки. Применение инфракрасного канала передачи данных с учетом того, что подвижный модуль питается от автономного источника питания, позволяет добиться надежной гальванической развязки биообъекта от электрических сетей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный регистратор среднеквадратических значений биопотенциалов | 2016 |
|
RU2623644C1 |
| НАРУЧНЫЙ КАРДИОМОНИТОР-ЧАСЫ | 2005 |
|
RU2308883C1 |
| КАРДИОРИТМОАНАЛИЗАТОР | 1997 |
|
RU2132153C1 |
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ РИТМОГРАММЫ СЕРДЦА | 2000 |
|
RU2199945C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СИСТЕМА ДЛЯ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ | 2005 |
|
RU2291665C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ | 1995 |
|
RU2126594C1 |
| СКВАЖИННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕМПЕРАТУРЫ ПОГРУЖНОГО ЭЛЕКТРОДВИГАТЕЛЯ И ДАВЛЕНИЯ НА ПРИЕМЕ НАСОСА | 1995 |
|
RU2099522C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ЭПИЛЕПТИФОРМНОЙ АКТИВНОСТИ | 2011 |
|
RU2498769C2 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
Изобретение относится к медицинскому приборостроению, а именно к устройствам для регистрации биоэлектрических потенциалов с передачей информации в ЭВМ в реальном времени с целью отображения, хранения, постановки диагноза и т. д. Устройство содержит электроды и экранированный кабель, два измерительных канала, содержащих последовательно соединенные инструментальный усилитель, фильтр нижних частот, масштабирующий усилитель, повторитель, инвертирующий усилитель, универсальный микроконтроллер с двумя аналогово-цифровыми преобразователями, двумя цифроаналоговыми преобразователями и одним универсальным асинхронным приемопередатчиком, два импульсно-кодовых преобразователя, два оптически связанных между собой инфракрасных приемопередатчика, конвертор уровня и ЭВМ. 2 ил.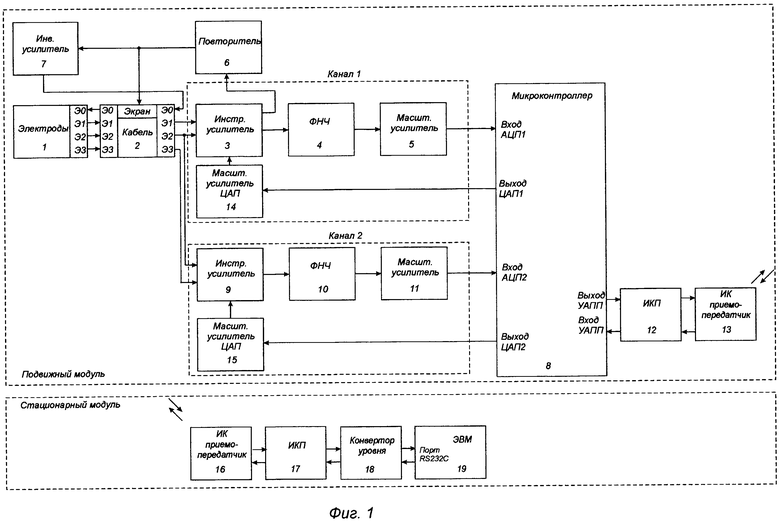
Телеметрический регистратор биопотенциалов с компенсацией дрейфа изолинии, содержащий электроды и экранированный кабель, два измерительных канала, содержащие каждый последовательно соединенные инструментальный усилитель, фильтр нижних частот и масштабирующий усилитель, причем первый электрод соединен посредством кабеля с первым входом инструментального усилителя первого канала, второй электрод соединен посредством кабеля со вторым входом инструментального усилителя первого канала и первым входом инструментального усилителя второго канала, а третий электрод посредством кабеля соединен со вторым входом инструментального усилителя второго канала, отличающийся тем, что в него введены повторитель, вход которого соединен со вторым выходом инструментального усилителя первого канала, а выход соединен с экраном кабеля, инвертирующий усилитель, вход которого соединен с выходом повторителя, а выход посредством кабеля соединен с нулевым электродом, микроконтроллер с двумя аналогово-цифровыми преобразователями, двумя цифроаналоговыми преобразователями и одним асинхронным приемопередатчиком, причем вход первого аналогово-цифрового преобразователя микроконтроллера соединен с выходом масштабирующего усилителя первого канала, вход второго аналогово-цифрового преобразователя микроконтроллера соединен с выходом масштабирующего усилителя второго канала, в каждый измерительный канал введена обратная связь, выполненная в виде второго в канале масштабирующего усилителя, вход которого соединен с выходом соответствующего цифроаналогового преобразователя микроконтроллера, а выход - с входом корректировки постоянного выходного уровня соответствующего инструментального усилителя, первый импульсно-кодовый преобразователь, модулирующий вход и демодулирующий выход которого подключены к выходу и к входу асинхронного приемопередатчика микроконтроллера, первый инфракрасный приемопередатчик, электрический вход и выход которого соединены соответственно с модулирующим выходом и демодулирующим входом первого импульсно-кодового преобразователя, второй инфракрасный приемопередатчик, оптически связанный с первым, второй импульсно-кодовый преобразователь, демодулирующий вход и модулирующий выход которого подключены к электрическому выходу и электрическому входу второго инфракрасного приемопередатчика, конвертор уровня, вход и выход уровня транзисторно-транзисторной логики которого соединены соответственно с демодулирующим выходом и модулирующим входом второго импульсно-кодового преобразователя, а его входы-выходы соединены с последовательным асинхронным портом электронно-вычислительной машины.
| ТЕЛЕМЕТРИЧЕСКИЙ КОМПЛЕКС ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЧЕЛОВЕКА | 2000 |
|
RU2175212C1 |
| СПОСОБ Л.М. БАКУСОВА МОНИТОРИНГА ФИЗИОЛОГИЧЕСКИХ СИГНАЛОВ В ЖИДКИХ СРЕДАХ | 1999 |
|
RU2177246C2 |
| БИОТЕЛЕМЕТРИЧЕСКОЕ УСТРОЙСТВО | 1990 |
|
RU2018264C1 |
| КОНВЕРТ | 1929 |
|
SU16988A1 |

