Изобретение относится к области радиотехники и связи и, в частности, к способам модуляции и демодуляции при передаче сигналов с частотной модуляцией.
Известны способы модуляции и демодуляции при передаче дискретных сигналов, при которых при модуляции символам Sj(n), где j=(0, q-1), двухуровневого (см. патент США 5077538, М.кл. Н 03 D 3/06, H 03 D 3/20, опубл. 31.12.1991 г. ) или многоуровневого (см. патент РФ 2151467, М.кл. H 04 L 27/14, H 03 D 3/20, опубл. 26.06.2000 г.) модулирующих сигналов ставятся в соответствие модулированные сигналы хi(n), где i=(0, q-1), отличающиеся друг от друга по частоте таким образом, что частоты сигналов fi=f0+iΔf, где f0-наименьшая частота, Δf- девиация частоты, а при демодуляции производят преобразование частоты модулированных сигналов хi(n) в демодулированные сигналы аi(n)=Af1, где А - постоянная величина, соответствующая масштабу преобразования, сравнение полученных демодулированных сигналов аi(n) с пороговыми уровнями и выносят решение о передаваемых символах Sj(n).
Однако, как в патенте США 5073538, так и в патенте РФ 2151467, выбранном за прототип, имеет место смещение постоянного уровня демодулированного сигнала в зависимости от смещения несущих и опорных частот сигнала, что приводит к необходимости адаптации порогового уровня, которая осуществляется путем измерения пиковых отклонений демодулированного сигнала, их усреднения и вычисления величины смещения среднего уровня демодулированного сигнала.
Из-за случайного характера сигнала, искажений в канале и неизбежных помех процесс измерения требует определенных временных затрат, связанных с необходимостью усреднения, что приводит к увеличению времени вхождения в связь. При коротких пакетах передаваемой информации этот фактор приводит к существенному снижению реальной скорости передачи.
Задачей изобретения является создание такого способа модуляции и демодуляции, который был бы инвариантным к сдвигу несущих и опорных частот сигнала, т.е. не требовал бы обеспечения адаптации порогового уровня.
Решение поставленной задачи обеспечивается в способе модуляции и демодуляции при передаче дискретных сигналов, при котором при модуляции q-м символам Sj(n) модулирующего сигнала, где j=(0; q-1), n - порядковый номер символа, ставятся в соответствие модулированные сигналы xi(n) длительностью Т, где i= (0, q-1), отличающиеся друг от друга по частоте таким образом, что частоты сигналов fi= f0+iΔf, где f0 - наименьшая частота, а Δf - девиация частоты, а при демодуляции производят преобразование частоты модулированного сигнала xi(n) в демодулированный сигнал аi(n)=Afi, где А - постоянная величина, соответствующая масштабу преобразования, сравнение полученного демодулированного сигнала ai с пороговыми уровнями и выносят решение о передаваемых символах Sj(n), отличающемся тем, что при модуляции значения модулированного сигнала xi(n) формируют в зависимости от значения модулированного сигнала xi(n-1) при передаче предыдущего символа Sj(n-1) и значения передаваемого символа Sj(n) в соответствии с выражением: xi(n)=x[i(n-1) +j(n)] modq, а при демодуляции производят вычитание из демодулированного сигнала аi(n) демодулированного сигнала ai(n-1) при демодуляции предыдущего символа Sj(n-1), осуществляют сравнение нормированной разности
причем Р может принимать значения Р=(-q+1,...0,...q-1), с 2q-2 пороговыми уровнями, и выносят решение о значении демодулированного символа Sj(n) в соответствии с выражением:
Sj(n)=S(p+q)modq
Поясним, каким образом указанные выше отличия обеспечивают решение поставленной задачи.
Смещение постоянного уровня демодулированного сигнала аi(n) приводит к тому, что вместо необходимого уровня ai(n) появляется уровень аi(n)+В, где В - сдвиг уровня демодулированного сигнала, вызванного уходом постоянного уровня демодулированного сигнала.
При этом ясно, что сдвиг В имеет место как при демодуляции текущего символа Sj(n), так и при демодуляции предыдущего символа Sj(n-1).
Поэтому при вычитании в процессе демодуляции из демодулированного сигнала ai(n) демодулированного сигнала ai(n-1) в соответствии с выражением:
эта нормированная разность не будет зависеть от имеющего место сдвига В, следовательно, отпадает необходимость в адаптации порогового уровня.
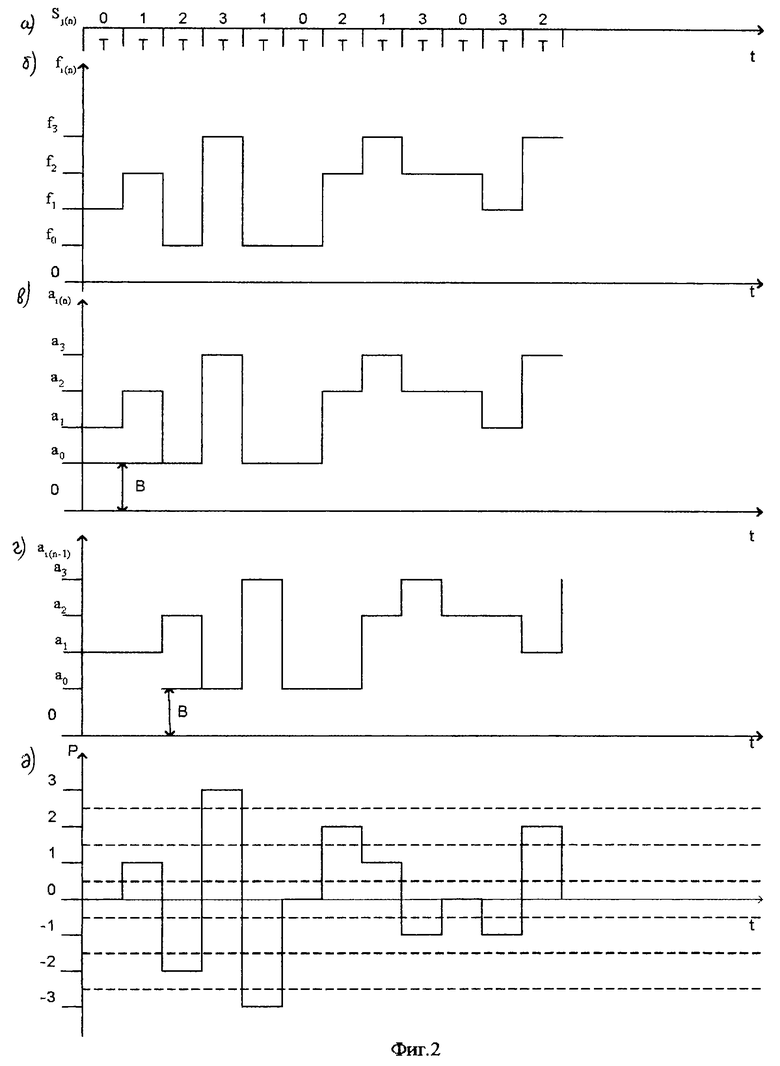
Пример реализации предлагаемого способа модуляции и демодуляции при передаче дискретных сигналов показан в варианте устройств модуляции и демодуляции, приведенном на фиг. 1 а) и б) соответственно. На фиг.2 в качестве примера приведены временные диаграммы для четверичных символов (q=4). При этом на фиг.2 а) показаны поступающие от источника информации символы Sj(n) модулирующего сигнала в виде многоразрядных двоичных чисел; на фиг.2 б) показаны отличающиеся друг от друга частоты fi(n) модулированных сигналов xi(n); на фиг.2 в) показаны отличающиеся по уровню демодулированные сигналы ai(n) при демодуляции текущих символов Sj(n) и сдвиг В уровня демодулированного сигнала, вызванный уходом постоянного уровня демодулированного сигнала; на фиг. 2г) показаны отличающиеся по уровню демодулированные сигналы ai(n-1) при демодуляции предыдущих символов Sj(n-1); и аналогичный сдвиг В уровня демодулированного сигнала; на фиг.2д) показаны уровни нормированной разности Р и пунктирной линией - пороговые уровни, с которыми осуществляют сравнение уровней нормированной разности Р.
В соответствии с фиг.1а) устройство модуляции содержит элемент 1 задержки, сумматор 2 по модулю q, постоянное запоминающее устройство 3, цифроаналоговый преобразователь 4, генератор 5 тактовых импульсов, при этом первый вход сумматора 2 по модулю q соединен с его выходом через элемент задержки 1, причем выход сумматора 2 по модулю q подключен также к первому входу постоянного запоминающего устройства 3, выходом связанного со входом цифроаналогового преобразователя 4, выход которого является выходом устройства модуляции. Вход генератора 5 тактовых импульсов соединен со входом устройства модуляции, связанного со вторым входом сумматора 2 по модулю q, на который поступают модулирующие символы, а выход генератора 5 тактовых импульсов подключен ко входу элемента 1 задержки и второму входу постоянного запоминающего устройства 3.
В соответствии с фиг.1б) устройство демодуляции содержит частотный дискриминатор 6, элемент 7 задержки, вычитающее устройство 8, пороговое устройство 9, решающее устройство 10, причем на вход частотного дискриминатора 6 поступает модулированный сигнал с выхода цифроаналогового преобразователя 4 устройства модуляции, выход частотного дискриминатора 6 соединен с соответствующими входами вычитающею устройства 8 как непосредственно, так и через элемент задержки 7, выход вычитающего устройства 8 подключен ко входу порогового устройства 9, выход которого соединен со входом решающего устройства 10.
Рассмотрим реализацию предлагаемого способа модуляции и демодуляции при передаче дискретных сигналов в приведенных выше устройствах модуляции и демодуляции.
Модулирующий символ Sj(n) от источника информации поступает в виде многоразрядных двоичных чисел на вход сумматора 2 по модулю q, где происходит суммирование этого числа с суммой, которая имела место при поступлении предыдущего символа, что обеспечивается подачей сигнала с выхода сумматора 2 по модулю q на его вход с задержкой на время Т, обеспечиваемой элементом 1 задержки. На выходе сумматора 2 по модулю q имеет место число, определяющее вариант модулированного сигнала. Варианты модулированных сигналов в цифровом виде записаны в запоминающем устройстве 3, вследствие этого при поступлении на адресный вход запоминающего устройства 3 числа, определяющего вариант модулированного сигнала, имеющегося в запоминающем устройстве 3, происходит считывание чисел, определяющих мгновенные значения модулированного сигнала. Упомянутые цифровые значения поступают на вход цифроаналогового преобразователя 4, который осуществляет их преобразование в соответствующий модулированный сигнал. Моменты выбора варианта сигнала определяются тактовой последовательностью с периодом Т, которая задается генератором 5 тактовых импульсов, который синхронизирован, в свою очередь, с моментами поступления модулирующих символов.
При демодуляции модулированный сигнал поступает на вход частотного дискриминатора 6, где происходит преобразование частоты сигнала в уровень сигнала. С выхода частотного дискриминатора 6 сигнал поступает на вход элемента 7 задержки, где задерживается на время Т и поступает на один из входов вычитающего устройства 8, на другой вход которого поступает сигнал с выхода частотного дискриминатора 6 непосредственно. Полученная на выходе вычитающего устройства 8 разность сигналов поступает на пороговое устройство 9, на выходе которого имеет место число, однозначно определяющее вариант модулирующего символа. Упомянутое число поступает на решающее устройство 10, обеспечивающее получение на его выходе модулирующего символа.
Пример выполнения блоков устройств модуляции и демодуляции при реализации предлагаемого способа может быть пояснен следующим образом.
Все операции, необходимые для реализации модулятора, могут быть выполнены при помощи микропроцессоров (например, ADUC812 www.analog.com.). Частотный дискриминатор может быть реализован при помощи, например, микросхем МС 3359, МС3361, 174ХА26 или им подобным (см. Моторола Linear/Interface ICs, Device Data, Vol.II Motorola INC., 1993 8-69; 8-75). Элементы задержки могут быть реализованы на пассивных LC элементах, на активных RC элементах, на приборах с зарядовой связью, на устройствах выборок хранения и другими способами. Вычитающее устройство реализуется при помощи операционного усилителя (например, К140УД7; Справочник разработчика и конструктора РЭА, Москва, 1993г., кн.1, с.100), пороговое устройство при помощи микросхем компараторов (например, К521СА3; Справочник разработчика и конструктора РЭА, Москва, 1993г. , кн.1, с.103), решающее устройство представляет собой комбинационную логическую схему и может быть реализовано при помощи логических микросхем широкого применения (например, серии К555; Справочник разработчика и конструктора РЭА, Москва, 1993 г. , кн.1, с.116-120). В равной степени, элементы 7, 8, 9 и 10 могут быть реализованы при помощи микропроцессоров, например, ADUC812 (www.analog.com).
Изобретение относится к системам связи и может использоваться при передаче сигналов с частотной модуляцией. Технический результат заключается в создании способа модуляции и демодуляции, инвариантного к сдвигу несущих и опорных частот сигнала, не требующего адаптации порогового уровня. При модуляции q-м символам Sj(n) модулирующего сигнала, где j=(0; q-1), n - порядковый номер символа, ставятся в соответствие модулированные сигналы xi(n), длительностью Т, где i=(0; q-1), отличающиеся друг от друга по частоте таким образом, что частоты сигналов fi=fo+iΔf, где fo - наименьшая частота, a Δf - девиация частоты, а при демодуляции производят преобразование частоты модулированного сигнала xi(n) в демодулированный сигнал аi(n)=Аfi, где А - постоянная величина, соответствующая масштабу преобразования, сравнение полученного демодулированного сигнала аi с пороговыми уровнями и выносят решение о передаваемых символах Sj(n). 7 ил.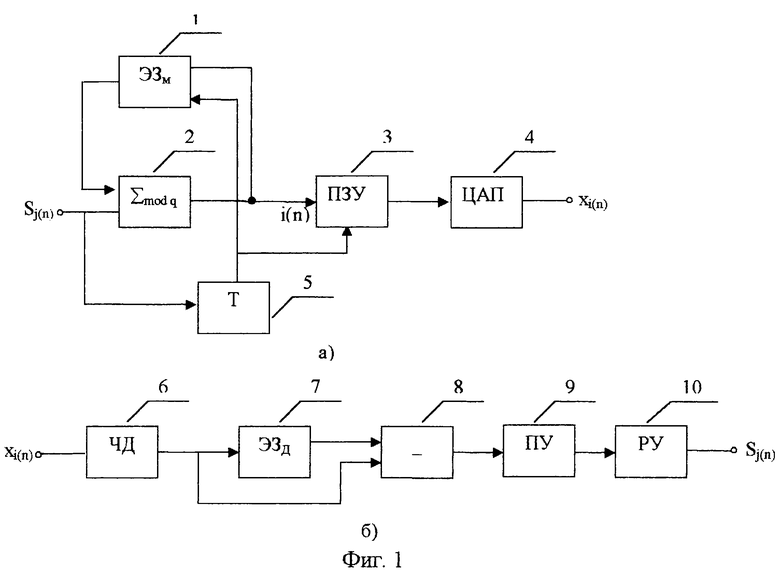
Способ модуляции и демодуляции при передаче дискретных сигналов, заключающийся в том, что при модуляции q-ичным символам Sj(n) модулирующего сигнала, где j = (0; q-1), n - порядковый номер символа, ставятся в соответствие модулированные сигналы xi(n), длительностью Т, где i = (0; q-1), отличающиеся друг от друга по частоте таким образом, что частоты сигналов fi=f0+iΔf, где f0 - наименьшая частота, a Δf - девиация частоты, а при демодуляции производят преобразование частоты модулированного сигнала xi(n) в демодулированный сигнал ai(n)=Afi, где А - постоянная величина, соответствующая масштабу преобразования, сравнение полученного демодулированного сигнала ai с пороговыми уровнями и выносят решение о передаваемых символах Sj(n), отличающийся тем, что при модуляции значения модулированного сигнала xi(n) формируют в зависимости от значения модулированного сигнала xi(n-1) при передаче предыдущего символа Sj(n-1) и значения передаваемого символа Sj(n) в соответствии с выражением
xi(n)=x[i(n-1)+j(n)]mod q,
а при демодуляции производят вычитание из демодулированного сигнала аi(n) демолулированного сигнала ai(n-1) предыдущего символа Sj(n-1), осуществляют сравнение нормированной разности
причем P может принимать значения Р=(-q+1, ...0, ...q-1), с 2q-2 пороговыми уровнями и выносят решение о значении демодулированного символа Sj(n) в соответствии с выражением
Sj(n)=S(p+q)mod q.
| ПРИЕМНИК С НАСТРАИВАЕМЫМ УРОВНЕВЫМ ДЕМОДУЛЯТОРОМ СИМВОЛОВ | 1995 |
|
RU2151467C1 |
| US 5077538 A, 12.01.1992 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

