Настоящее изобретение относится к пакету канала сигнализации для системы связи.
В системах связи, например, в Общеевропейской цифровой мобильной сотовой системе радиосвязи стандарта GSM (Цифровой стандарт сотовой радиосвязи) терминал и базовая станция осуществляют связь посредством коммуникационных каналов передачи радиосигналов. В системах подобного типа предусмотрено множество каналов для осуществления передач от терминалов к базовым станциям и передач от базовых станций к терминалам.
Такие каналы включают канал управления, в котором осуществляется непрерывная передача и который обеспечивает для терминала возможность доступа к системе посредством базовой станции, осуществляющей передачу в этом канале, для осуществления вызовов. Терминал должен поэтому идентифицировать данный канал управления для того, чтобы получить информацию, позволяющую ему зарегистрироваться в системе. Эта информация включает информацию синхронизации, а соответствующая процедура определяется поэтому как процедура синхронизации.
Решение, в общем случае принятое для применения в процедуре синхронизации, выполняется в два этапа. Первоначально терминал измеряет мощность сигналов, принятых во всех каналах приема. Затем терминал пытается синхронизироваться с каналом, которому соответствует максимальная принятая мощность. Если ему это не удается, то он пытается осуществить то же самое для других каналов, в порядке убывания принимаемой мощности, до тех пор, пока в конечном счете он не осуществит синхронизацию. Это решение определено в Рекомендациях 4.08 и 5.08 Стандарта GSM.
Процедура синхронизации выполняется систематически, когда терминал включается, и, в более общем случае, после любой потери синхронизации, например, когда канал радиосвязи, образованный каналом управления между базовой станцией и терминалом, прерывается. Это может происходить преднамеренно, например в случае выключения терминала, или непреднамеренно. Терминал может быть временно неспособен к синхронизации, ввиду неадекватности условий приема радиосигналов. Это может иметь место, например, в туннеле, или, в более общем случае, в области радиотени.
Синхронизация обычно предусматривает два этапа. Первый этап или фаза частотной синхронизации состоит в получении опорной частоты от базовой станции. Второй этап или фаза временной синхронизации состоит в получении опорного времени от базовой станции. Для этого в GSM-системе канал управления (BCCH) включает в себя два субканала, а именно: субканал управления по частоте (FCH) для осуществления частотной синхронизации и субканал синхронизации (SCH) для временной синхронизации.
Субканал управления по частоте использует сигнал в форме пакета, соответствующий чистой синусоиде, передаваемой с регулярными временными интервалами. В этих условиях терминал должен отслеживать этот пакет в течение временного интервала, соответствующего по существу периоду повторения пакетов.
Ввиду характерных особенностей пакета и средств, используемых для его обнаружения, невозможно определить его начало или его длительность, и поэтому необходимо использовать субканал синхронизации для обеспечения требуемой синхронизации во времени.
Субканал синхронизации отслеживает сигнал субканала управления по частоте с известной временной задержкой. Он содержит последовательность символов с соответствующей автокорреляционной функцией. В терминале эта последовательность синхронизации известна и осуществляется корреляция этой последовательности с последовательностью принимаемых символов. Ввиду неточности временной опоры базовой станции, в терминале точно не известно, какой из принятых символов соответствует первому символу синхронизирующей последовательности, поэтому требуется определение множества корреляций за счет сдвига одной из последовательностей относительно другой, для того чтобы идентифицировать корреляционный пик.
Целью изобретения поэтому является повышение эффективности процедуры синхронизации.
В большинстве систем радиосвязи подсистема передачи радиосигналов включает элемент, являющийся подвижным. В результате этого частота радиосигнала изменяется вследствие доплеровского эффекта.
Доплеровский сдвиг частоты обычно имеет место в системе GSM, если терминал является подвижным, и его значение прямо пропорционально скорости терминала. Хотя относительно просто обнаружить чистую синусоиду субканала управления по частоте, если ее частота известна, например, с помощью избирательного фильтра, однако данная проблема усложняется, если указанная частота изменяется на величину неизвестного доплеровского сдвига. В этом случае требуется фильтр с шириной полосы, которая учитывает максимальный доплеровский сдвиг в обоих направлениях, что существенно ухудшает эффективность фильтра.
Более того, в системах, использующих негеостационарные спутники, частотный сдвиг имеет намного большую величину, чем, например, в системе GLORALSTAR.
Система данного типа использует спутник на низкой околоземной орбите, например, на высоте 1390 км, движущийся со скоростью, например около 7,2 км/с, в качестве ретрансляционной станции между терминалом и базовой станцией.
Спутник принимает радиосигнал от базовой станции и переизлучает его к терминалу. Спутник действует просто в качестве "зеркала": он передает сигнал, который он принимает от базовой станции, без изменения или по меньшей мере после преобразования его по частоте.
Частотный сдвиг зависит от скорости и от положения спутника относительно терминала, который сам может рассматриваться как стационарный.
Ясно, что этот частотный сдвиг должен быть скорректирован.
Поэтому другой целью изобретения является создание средства для коррекции частотного сдвига, обусловленного доплеровским эффектом.
В системах радиосвязи сигналы в каналах связи часто передаются следующим образом.
Передатчик передает последовательность символов по каналу передачи. Передаваемая последовательность подвергается искажениям в канале передачи, в результате чего принятая последовательность символов не идентична переданной. Искажение в основном связано с межсимвольной интерференцией, обусловленной тем, что в канале передачи конкретный символ может проходить по различным трассам распространения. Если по меньшей мере две трассы имеют разность путей распространения больше расстояния между двумя символами, передаваемыми последовательно, символ, прошедший по одному из этих путей, будет интерферировать с последующим символом, прошедшим по другому, более короткому, пути.
В приемнике используется выравниватель для коррекции межсимвольной интерференции. Для корректной работы в выравнивателе должен быть известен импульсный отклик канала передачи. С этой целью известные символы передаются в качестве тестовой последовательности. Тестовая последовательность выбирается такой, чтобы соответствовать характеристикам канала передачи и, в частности, его длине.
При условии, что символы передаются регулярным образом, с интервалом, называемым периодом следования символов, длина канала определяется как число периодов следования символов, что эквивалентно разности между самой длинной трассой распространения и самой короткой трассой распространения для данного канала.
В приемнике используется устройство оценки канала для определения импульсного отклика канала. Оно формирует копию тестовой последовательности и коррелирует ее с принятой последовательностью символов. В результате получается набор коэффициентов hi, где i изменяется от 0 до L, L - длина канала. Этот набор коэффициентов обеспечивает информацию, используемую выравнивателем. Самая прямая (короткая) трасса канала представлена коэффициентом h0, а остальные коэффициенты представляют более длинные трассы, обуславливающие интерференцию.
Ясно, что канал не может быть оценен, пока не будет осуществлена синхронизация. Более того, для этой цели должен быть предусмотрен специальный пакет, а именно, тестовая последовательность.
Поэтому еще одной целью изобретения является создание средства оценивания канала.
Кроме того, в любой системе связи требуется несколько сигналов канала сигнализации для установления вызова. В настоящем контексте термин "синхронизация" следует понимать в наиболее общем смысле, в частности, он включает информацию синхронизации, информацию, требуемую для коррекции доплеровского сдвига, и информацию, используемую для оценивания канала передачи.
Настоящее изобретение направлено на упрощение обработки этих сигналов.
С этой целью предусмотрен пакет сигнализации для системы связи, который включает опорный сигнал, модулированный в соответствии с законом модуляции, представляющим собой предварительно определенную функцию времени в пределах пакета.
Более того, опорный сигнал является частотно-модулированным. Кроме того, закон модуляции является линейной функцией времени.
Более точно, если закон модуляции используется в двух квадратурных каналах, в каждом канале могут быть предусмотрены две различные функции.
Это обеспечивает создание опорного сигнала, который по своей сущности включает информацию, из которой может быть восстановлено время передачи в любой момент в пределах сигнала.
В первом аспекте изобретения оно предусматривает устройство для оценивания доплеровского сдвига несущей, передающей пакет синхронизации указанного типа, содержащее
- гетеродин,
- смеситель для приема сигнала несущей и выходного сигнала гетеродина,
- фильтр для приема выходного сигнала смесителя и формирования сигнала промежуточной частоты,
- схему анализатора для приема сигнала промежуточной частоты и формирования сигнала сдвига, представляющего обусловленный доплеровским эффектом частотный сдвиг между теоретическим значением частоты и частоты сигнала промежуточной частоты,
- схему управления гетеродином для получения оценки доплеровского сдвига исходя из сигнала сдвига.
В этом устройстве схема управления управляет гетеродином для уменьшения частотного сдвига.
В первом варианте устройства схема анализатора включает по меньшей мере первый фильтр, настроенный на опорный сигнал, с центральной частотой, равной теоретическому значению частоты, и схему коррекции для формирования первого коэффициента формы выходного сигнала фильтра, а схема управления осуществляет управление гетеродином для максимизации первого коэффициента формы.
Схема управления осуществляет управление гетеродином путем последовательной аппроксимации, вводя частотную коррекцию с любой стороны от данной частоты, обеспечивающей максимальный коэффициент формы, для поиска вновь максимального коэффициента формы, при этом последовательные процедуры поиска проводятся с уменьшением значения частотной коррекции до предварительно определенного порога коррекции.
Как вариант, при амплитуде сдвига, существенно равной максимальному доплеровскому сдвигу сигнала промежуточной частоты, устройство также содержит второй и третий фильтры, настроенные на опорный сигнал, с центральной частотой, равной теоретическому значению частоты соответственно увеличенному и уменьшенному на амплитуду сдвига; схема коррекции определяет, помимо первого коэффициента формы, второй и третий коэффициенты формы выходного сигнала второго и третьего фильтров соответственно и формирует сигнал сдвига, пропорциональный обратной величине центра тяжести центральных частот фильтров, взвешенных соответствующими коэффициентами формы.
Схема управления может управлять гетеродином так, чтобы сигнал промежуточной частоты имел частоту, увеличенную на частоту сигнала сдвига.
Во втором аспекте изобретения оно предусматривает устройство синхронизации с несущей, передающей пакет сигнализации указанного типа, причем опорный сигнал имеет длительность T и передается периодически с периодом повторения Tr, а интервал измерения имеет предварительно определенную длительность, большую или равную T + Tr, при этом устройство содержит
- гетеродин,
- смеситель для приема сигнала несущей и выходного сигнала гетеродина,
- фильтр для приема выходного сигнала смесителя и формирования сигнала промежуточной частоты,
- схему анализатора для приема сигнала промежуточной частоты и формирования сигнала смены частоты, если опорный сигнал не обнаружен, и сигнала частотного сдвига, представляющего разность между теоретическим значением частоты и частотой сигнала промежуточной частоты,
- схему управления для управления гетеродином так, чтобы он настраивался на несущую и затем, спустя интервал измерения, либо настраивался на другую несущую при наличии сигнала смены частоты, или уменьшал значение сигнала частотного сдвига в отсутствие сигнала смены частоты.
Схема анализатора содержит по меньшей мере первый фильтр, настроенный на опорный сигнал, с центральной частотой, равной теоретическому значению частоты, и схему коррекции для формирования первого коэффициента формы выходного сигнала этого фильтра, причем схема управления осуществляет управление гетеродином для максимизации первого коэффициента формы.
Схема управления осуществляет управление гетеродином путем последовательной аппроксимации, вводя частотную коррекцию с каждой стороны от частоты, формирующей максимальный коэффициент формы, для того чтобы осуществлять повторный поиск максимального коэффициента формы, причем последовательные процедуры поиска осуществляются с уменьшающимся значением частотной коррекции до предварительно определенного порога коррекции.
В одном из вариантов осуществления устройства синхронизации, в котором опорный сигнал передается периодически, с периодом повторения Tr, это устройство содержит
- гетеродин,
- смеситель для приема сигнала несущей и выходного сигнала гетеродина,
- фильтр для приема выходного сигнала промежуточной частоты,
- схему анализатора для приема сигнала промежуточной частоты и формирования сигнала частотного сдвига, представляющего временной интервал между приемом двух последовательных пакетов сигнализации,
- схему управления для управления гетеродином для уменьшения сдвига между сигналом частотного сдвига и периодом повторения Tr.
В третьем аспекте изобретения оно предусматривает устройство для оценивания канала передачи посредством несущей, передающей пакет сигнализации такого типа, содержащее
- гетеродин,
- смеситель для приема сигнала несущей и выходного сигнала гетеродина,
- фильтр для приема выходного сигнала смесителя и формирования сигнала промежуточной частоты,
- схему анализатора для приема сигнала промежуточной частоты и переноса ее в полосу модулирующих сигналов для формирования спектра канала,
- схему управления для управления гетеродином для получения оценки канала из спектра сигнала канала.
При использовании опорного сигнала, имеющего частотную характеристику с постоянным наклоном -μ, устройство управления управляет гетеродином так, что он формирует частоту соответственно частотной характеристике μ, противоположной по знаку соответствующей частотной характеристике опорного сигнала, начиная с приема сигнала по кратчайшему пути t0 в канале, при этом спектр сигнала в канале имеет набор спектральных линий, каждая из которых определяется ее частотой ri и ее амплитудой hi; причем конкретная спектральная линия соответствует пути ti и имеет частоту, связанную с длиной этого пути, а схема управления формирует указанную оценку путем определения каждого пути ti по его вкладу, который пропорционален амплитуде соответствующей спектральной линии hi, и по его временной задержке τi, имеющей значение (ri-го)/μ, для всех значений i от 0 до n, если принимаются во внимание (n+1) отдельных путей распространения.
Изобретение будет пояснено более детально в последующем описании вариантов его осуществления со ссылками на иллюстрирующие его чертежи, на которых показано следующее:
фиг. 1 - пример опорного сигнала в соответствии с изобретением;
фиг. 2 - схема, иллюстрирующая компоненты, необходимые для осуществления устройства в соответствии с изобретением;
фиг. 3 - форма входного сигнала и выходного сигнала настроенного фильтра, используемого в одном из вариантов осуществления изобретения;
фиг. 4 - частотно-временная характеристика сигнала полосы модулирующих сигналов, используемого для оценки канала передачи;
фиг. 5 - вариант опорного сигнала в соответствии с изобретением;
фиг. 6 - сигнал, принятый терминалом;
фиг. 7 - многокадровая структура сигнала канала сигнализации;
фиг. 8 - блок-схема устройства синхронизации;
фиг. 9 - блок-схема устройства для определения абсолютного значения доплеровского сдвига;
фиг. 10 - блок-схема упрощенного устройства для определения абсолютного значения доплеровского сдвига;
фиг. 11 - блок-схема устройства для определения знака доплеровского сдвига;
фиг. 12 - блок-схема устройства для коррекции доплеровского сдвига;
фиг. 13 - блок-схема устройства для отслеживания доплеровского сдвига.
Прежде всего будет определен пакет сигнализации, рассматриваемый в изобретении, со ссылками на фиг. 1.
Пакет определяется как опорная часть сигнала в течение конкретного времени T. В данном случае этот сигнал, т.е. опорный сигнал, имеет частоту, изменяющуюся как линейная функция времени. Принимая, что пакет начинается в момент t времени начала отсчета, мгновенную частоту f этого сигнала можно представить следующим выражением:
Сигнал предполагается имеющим постоянную амплитуду и может быть как аналоговым, так и цифровым сигналом.
Пакет передается на несущей C, как это обычно имеет место в системах передачи.
Пакет сигнализации позволяет эффективно оценить и скорректировать доплеровский сдвиг, имеющийся в сигнале несущей, и далее изобретение будет описано именно в данном аспекте.
На фиг. 2 показаны компоненты варианта выполнения приемника. Как это является общепринятым, приемник содержит антенну A для приема сигнала несущей. С антенной соединен усилитель, обычно представляющий собой малошумящий усилитель LNA.
Приемник также содержит смеситель M, который получает выходной сигнал гетеродина, например генератора, управляемого напряжением (VCO). Этот генератор управляется схемой управления CC, функция которой пояснена ниже. Выход смесителя соединен с полосовым фильтром BP, который формирует сигнал промежуточной частоты IF на своем выходе. Полосовой фильтр удовлетворяет обычным критериям режекции боковой полосы и фазовых искажений. Его центральная частота и его ширина полосы определены ниже.
Приемник предназначен для работы на конкретной промежуточной частоте, называемой теоретической частотой fт, что соответствует ситуации, когда отсутствует доплеровский сдвиг.
Предположим, что несущая подвергается воздействию доплеровского эффекта: частота сигнала промежуточной частоты изменяется от fт-Δf до fт+Δf, где Δf представляет амплитуду доплеровского сдвига для напряжения управления гетеродином VCO, который должен формировать частоту, равную fт. Поэтому центральная частота полосового фильтра BP установлена равной fт, а его полоса равна полосе сигнала, увеличенной в 2•Δf.
В соответствии с изобретением приемник содержит три фильтра, настроенные на опорный сигнал:
- первый фильтр MF1 с центральной частотой, равной теоретическому значению частоты fт,
- второй фильтр MF2 с центральной частотой, равной теоретическому значению частоты fт минус амплитуда доплеровского сдвига, т.е. fт-Δf;
- третий фильтр MF3 с центральной частотой, равной теоретическому значению частоты fт плюс амплитуда доплеровского сдвига, т.е. fт+Δf.
Эти настроенные фильтры могут быть выполнены, например, в виде фильтров на поверхностных акустических волнах (ПАВ).
На фиг. 3 представлен входной сигнал X и огибающая Y выходного сигнала фильтра этого типа с использованием той же самой временной шкалы.
Этот фильтр имеет время распространения Tр и формирует выходной сигнал, форма которого, хорошо известная специалистам в данной области техники, представляет собой затухающую функцию вида sin x/x и имеет основной лепесток с максимальным значением Aс, ширина которого, измеренная на уровне амплитуды, равном максимальному значению Aс минус заданное значение Ad (например, 20 дБ), равна Tс.
Определяется коэффициент формы W, который характеризует форму основного лепестка. Для этого может быть выбрано максимальное значение Aс или энергия, содержащаяся в этом лепестке, или ширина Tс этого лепестка. Здесь для примера было выбрано отношение максимального значения Aс к ширине Tс
W = Aс/Tс
Каждый из этих трех настроенных фильтров MF1, MF2, MF3 имеет ширину полосы такую, что входной сигнал, соответствующий опорному сигналу, но с частотой, сдвинутой на Δf относительно его частоты настройки, дает коэффициент формы W, имеющий значение выше порога обнаружения Sd, так что соответствующий основной лепесток может быть обнаружен.
Приемник, кроме того, содержит схему коррекции CORR, показанную на фиг. 2. Эта схема принимает выходные сигналы первого, второго и третьего настроенных фильтров MF1, MF2 и MF3 и рассчитывает соответствующие первый, второй и третий коэффициенты формы W1, W2, W3. Коэффициент формы, значение которого ниже порога обнаружения Sd, устанавливается на нулевое значение. Если первый коэффициент формы W1 ненулевой, то схема формирует сигнал CF смены частоты, который передается в схему управления CC и использование которого будет более детально рассмотрено ниже.
Если первый коэффициент формы W1 ненулевой, то схема коррекции CORR формирует сигнал сдвига SH, также передаваемый в схему управления, следующего вида:
Эта величина представляет собой величину, обратную центру тяжести центральных частот настроенных фильтров, взвешенных соответствующими коэффициентами формы. Значение, пропорциональное этому центру тяжести или любому другому значению, может быть выбрано при условии, что оно представляет разницу между теоретическим значением частоты fт и частотой сигнала промежуточной частоты.
Напомним, что целью является измерение и коррекция доплеровского сдвига несущей C, которая предназначена для передачи пакета сигнализации.
Напомним также, что пакет сигнализации длительностью T передается периодически с периодом повторения Tr.
Соответственно схема управления CC управляет гетеродином VCO, так что сигнал IF промежуточной частоты будет иметь частоту fт, если несущая не подвергается воздействию доплеровского эффекта. В конце интервала измерения длительностью по меньшей мере T+Tr схема коррекции должна обязательно определить, что первый коэффициент формы W1 ненулевой, поскольку первый настроенный фильтр спроектирован соответствующим образом.
В конце этого первого интервала измерения схема управления получает сигнал сдвига SH, который здесь имеет значение D1. Она затем управляет гетеродином VCO, так что он формирует частоту, увеличенную на D1.
Затем она ожидает второго интервала измерения для считывания нового значения D2 сигнала сдвига SH и вновь корректирует частоту гетеродина VCO таким образом, что он формирует частоту, увеличенную на D2. Эта процедура продолжается до тех пор, пока после n интервалов измерений сигнал SH не примет значение Dn.
Если Dn ниже порога Sс коррекции, который в рассматриваемом случае применения может иметь значение, например 100 Гц, то доплеровский сдвиг скорректирован и его значение равно
До сих пор рассматривалось использование трех настроенных фильтров. Во многих случаях амплитуда доплеровского сдвига Δf позволяет использовать один настроенный фильтр с центральной частотой, равной теоретическому значению частоты fт и полоса которого выбрана так, что его коэффициент формы выше порога обнаружения Sd, если выходной сигнал соответствует опорному сигналу, сдвинутому на +/-Δf.
В этом случае схема управления CC управляет гетеродином VCO так, что сигнал промежуточной частоты IF имеет частоту fт, если несущая не подвергается воздействию доплеровского эффекта.
Схема коррекции CORR формирует тогда в качестве сигнала сдвига SH коэффициент формы выходного сигнала этого одного настроенного фильтра.
В конце первого интервала измерения значение коэффициента формы равно Wто. Схема управления затем управляет гетеродином VCO так, что он снижает промежуточную частоту на Δf/2, а в конце второго интервала измерения регистрирует значение Wmo коэффициента формы. Схема управления CC затем управляет гетеродином VCO так, что он увеличивает промежуточную частоту на Δf/2, а в конце третьего интервала измерения регистрирует значение WMo.
Затем она определяет, какое из трех значений - Wтo, Wmo, WMo - является наибольшим. Оно обозначается Wт1, и отсюда ясно, что частота F1, которая сформировала это значение, является наиболее близкой к частоте настройки.
Схема управления CC затем управляет гетеродином VCO так, что он формирует промежуточную частоту F1-Δf/4. В конце четвертого интервала измерения она регистрирует значение Wm1 сигнала сдвига. Затем она определяет, какое из трех значений - Wт1, Wm1, WM1 - является наибольшим. Оно обозначается Wт2, и ясно, что частота F2, которая сформировала это значение, является наиболее близкой к частоте настройки.
Процедура обработки продолжается точно так же, причем гетеродин управляется так, чтобы сформировать промежуточные частоты F2+Δf/8. Такой поиск путем последовательных аппроксимаций продолжается с полосой качания частоты, каждый раз уменьшающeйся вдвое, для получения такого значения Fn которому соответствует значение Δf/2n ниже порога коррекции Sс, который в рассматриваемом примере предполагается равным, например, 100 Гц.
Доплеровский сдвиг затем корректируется, и его значение равно Fn-fт.
Было описано устройство коррекции доплеровского сдвига с одним или тремя фильтрами, использующими технологию ПАВ. Данный пример выполнения был выбран ввиду его известности специалистам в данной области техники, особенно для промежуточной частоты в диапазоне от 10 МГц до нескольких десятков МГц.
Специалистам в данной области техники известно, что эти фильтры могут быть выполнены цифровыми с использованием цифрового процессора сигналов. Такое выполнение особенно подходит для узкополосных систем, в которых каналы разнесены по частоте примерно на 30 кГц. В этом случае может быть выбрана нулевая промежуточная частота для осуществления обработки сигналов непосредственно в полосе частот модулирующих сигналов.
Кроме того, ясно, что комбинация настроенных фильтров и схемы коррекции может быть представлена в виде единого блока, называемого далее схемой анализатора.
Таким образом, опорный сигнал был описан как сигнал, частота которого изменяется во времени по линейному закону. Это представляет собой один из простых примеров, разумеется, возможнo множество других законов изменения частоты, тем более, если используется цифровая обработка сигналов.
Кроме того, описана схема анализатора, которая оценивает доплеровский сдвиг с использованием одного или более фильтров. Однако имеются и другие решения, включая спектральный анализ с использованием, например, быстрого преобразования Фурье, которые не описаны здесь более подробно, поскольку они хорошо известны специалистам в данной области техники.
Теперь будет описано устройство синхронизации, использующее уже описанный пакет сигнализации.
Приемник должен пытаться синхронизироваться по меньшей мере с одной несущей из множества несущих на частотах C1-Cn.
Как показано на фиг. 2, схема управления CC управляет гетеродином VCO так, что он настраивается на несущую C1. Затем она осуществляет обработку так, как описано выше, для коррекции доплеровского сдвига. Если схема коррекции сформирует сигнал смены частоты CF, синхронизация с этой несущей не может быть достигнута, и гетеродин VCO затем управляется так, что он настраивается на другую несущую частоту, например C2.
Если схема коррекции не сформирует сигнал смены частоты, то синхронизация по частоте с несущей C1 обеспечивается в конце n интервалов измерений.
Временная синхронизация является прямым следствием схемы построения настроенного фильтра, характеристики которого представлены на фиг. 3. Характерной особенностью фильтра является то, что максимум основного лепестка появляется с временной задержкой, равной сумме времени прохождения настроенного фильтра и длительности пакета сигнализации относительно начала пакета, т.е. величине Tр + T. Это обеспечивает получение опорного значения времени.
Схема управления может измерять временной интервал между максимумами основных лепестков двух последовательных пакетов сигнализации. Это соответствует периоду повторения Tr и обеспечивает единицу измерения времени.
Как только опорное значение времени и единица измерения времени определены указанным образом, приемник является синхронизированным по времени.
После достижения состояния синхронизации одни и те же коррекции, естественно, используются для всех сигналов каналов, переданных одной и той же базовой станцией, независимо от того, на той же самой или другой несущей. Эти коррекции могут изменяться во времени, как и во всех таких системах, и, следовательно, осуществляется отслеживание состояния синхронизации.
Заметим, что для достижения временной синхронизации опорный сигнал может иметь самые различные формы, при условии, что одна из его характеристик изменяется во времени. До сих пор в описании в качестве такой характеристики рассматривалась частота, но также может быть и амплитуда.
Все это требуется для того, чтобы имелась возможность определения положения конкретного момента времени в пределах пакета сигнализации.
Этапы коррекции доплеровского сдвига и синхронизации были описаны как осуществляемые последовательно, однако они могут осуществляться перемежаясь, с чередованием. При коррекции доплеровского сдвига разность частот между базовой станцией и терминалом корректируется независимо от его особенностей. Можно определять опорное значение времени базовой станции до оценивания доплеровского сдвига.
Частота повторения пакетов сигнализации, которая обратна периоду повторения Tr, обычно пропорциональна несущей частоте, но намного ниже ее, в результате она в существенно меньшей степени подвержена воздействию доплеровского эффекта. Эта частота повторения поэтому может быть обнаружена первоначально путем измерения временного интервала между двумя последовательными основными лепестками на выходе настроенного фильтра, как уже отмечалось. Это позволяет сформировать хорошую аппроксимацию временной опоры базовой станции, а схема управления CC корректирует гетеродин VCO так, что он учитывает это опорное значение времени.
Доплеровский сдвиг затем может быть оценен, как объяснялось выше, причем в этой оценке фактически не будет ошибок из-за различий между опорными значениями времени для базовой станции и терминала.
Синхронизация затем может быть уточнена, как объяснялось выше.
Эффективным решением является выполнение первой части обработки сигнала в аналоговой области с использованием, например, фильтра ПАВ с относительно широкой полосой для коррекции гетеродина VCO с учетом разности между опорными частотами и, возможно, первой оценкой доплеровского сдвига. Остальная часть обработки может быть осуществлена в цифровой области.
Далее будет описано устройство оценивания канала, использующее вышеописанный пакет сигнализации.
Предположим, что канал передачи включает n+1 отдельных трасс распространения ti, каждая из которых вносит свой вклад в передачу с коэффициентом ai и вводит временную задержку τi относительно кратчайшего пути распространения t0, для которого временная задержка τ0 равна нулю, и, таким образом, образует опорное значение времени, причем i - целое число, изменяющееся в пределах от 0 до n.
Передаваемый сигнал представляет собой опорный сигнал, показанный на фиг. 1, мгновенная частота f которого равна
Схема управления CC управляет гетеродином VCO так, что он формирует сигнал с частотной характеристикой (наклоном), противоположной по значению соответствующей характеристике опорного сигнала относительно временной опоры τ0, так что эта частотная характеристика имеет значение
В этом случае схема анализатора представляет собой блок спектрального анализа, который обрабатывает принятый сигнал полосы модулирующих сигналов, частотные компоненты которого распределены во времени так, как показано на фиг. 4, без учета преобразования частоты.
Схема анализатора, которая осуществляет преобразование Фурье сигнала полосы модулирующих сигналов, формирует спектр, состоящий из спектральных линий, каждой из которых соответствует ее частота ri и ее амплитуда hi, причем i изменяется от 0 до n.
Основная спектральная линия, соответствующая кратчайшему пути, соответствует также наивысшей частоте r0 спектра.
Следующая спектральная линия соответствует пути, характеризуемому временной задержкой τ1 и частотой r1. Зная r0 и r1, τ1 определяется следующим образом:
i-я спектральная линия соответствует пути распространения с временной задержкой τi и частотой ri. Зная r0 и r1, τi можно определить следующим образом:
Амплитуды hi различных линий пропорциональны коэффициентам ai, и простая нормировка достаточна для получения этих коэффициентов.
Поэтому канал хорошо определяется посредством множества пар (τi, ai) для всех значений i от 0 до n.
Следующие количественные примеры приведены только для информации:
- диапазон качания по частоте: f2 - f1 = 200 кГц,
- длительность пакета сигнализации: T = 577 мкс,
- наклон частотной характеристики опорного сигнала: -μ = 346 мГц/c,
- разрешение или минимальное значение τi+1-τi: 2 мкс.
Под "разрешением" понимается разрешение во времени, обеспечивающее различение двух соседних трасс распространения ti+1 и ti. Оно обычно меньше, чем период повторения символов.
В этом случае минимальный частотный сдвиг Δr между соседними двумя последовательными спектральными линиями имеет значение
Δr = ri - ri+1 = 693 Гц
При использовании быстрого преобразования Фурье для N выборок с частотой дискретизации F и при обеспечении требуемого разрешения применимо следующее условие:
Если частота дискретизации равна 400 кГц, то число N выборок предпочтительно равно 1024.
Независимо от рассматриваемого устройства опорный сигнал может иметь множество форм, иных, чем показанныe на фиг. 1. Закон изменения частоты может быть нелинейным, и частота может быть возрастающей и затем убывающей и наоборот. Преимущество данного решения состоит в том, что различные из вышеприведенных операций обработки могут быть выполнены с использованием одного пакета сигнализации. Если несущая модулируется в цифровом виде, то при осуществлении изобретения может быть использована фазовая модуляция. В этом случае известный закон изменения фазы естественным образом применим к опорному сигналу.
Из вышеприведенного описания явным образом следует, что изобретение применимо к системам множественного доступа с временным разделением каналов, но специалист в данной области техники не будет испытывать никаких затруднений в использовании этого изобретения применительно к системе множественного доступа с кодовым разделением каналов.
Применение пакета сигнализации в соответствии с изобретением описывалось до сих пор в применении к технике радиосвязи. Другие возможные области техники включают оптическую передачу сигналов.
В случае передачи по оптическим волокнам с высокими скоростями передачи данных необходимо использовать регенераторы сигналов, которые должны синхронизироваться с сигналом, который они принимают. Эта проблема обычно решается путем размещения заголовка в начале пакета передаваемых символов. Однако символ расширяется при передаче, и это приводит к межсимвольной интерференции. Это затрудняет обнаружение заголовка.
Вышеописанный опорный сигнал может использоваться вместо заголовка. Помимо преимуществ, уже упомянутых ранее, этот сигнал более устойчив по отношению к эффекту расширения символов.
Далее будет описан другой вариант пакета сигнализации, описанного ранее, используемый в случае, когда опорный сигнал модулируется в двух каналах в фазовой квадратуре, т.е. в синфазном (1) и в квадратурном (Q) каналах.
Этот вариант особенно пригоден для использования в системе GLORALSTAR.
Пакетный сигнал управления частотой FCH стандарта GSM в этом случае заменяется пакетным сигналом FCCHd, определяемым следующим образом с помощью его компонентов SI(t), SQ(t).
В 1-канале обычного передатчика:
где t - переменная времени, которая изменяется от момента t=0, соответствующего началу пакетного сигнала FFCHd, до момента t = TB, соответствующего концу этого пакетного сигнала; 2fI - мгновенная частота в конце этого пакетного сигнала в 1-канале.
В Q-канале передатчика:
где 2fQ - мгновенная частота в конце пакетного сигнала в Q-канале.
Мгновенная частота, которая, как известно, пропорциональна производной фазового члена, т.е. составляющей для 1-канала
для 1-канала
и для Q-канала,
для Q-канала,
изменяется как линейная функция времени t при тех же значениях для t = 0 (начало пакетного сигнала) и различных значениях (2fI и 2fQ соответственно) в конце пакетного сигнала (t = ТB).
В графическом представлении изменение по времени мгновенной частоты fi в течение пакетного сигнала FCCHd показано на фиг. 5, для общего случая, прямолинейным сегментом 6 для 1-канала и прямолинейным сегментом 7 для Q-канала передатчика.
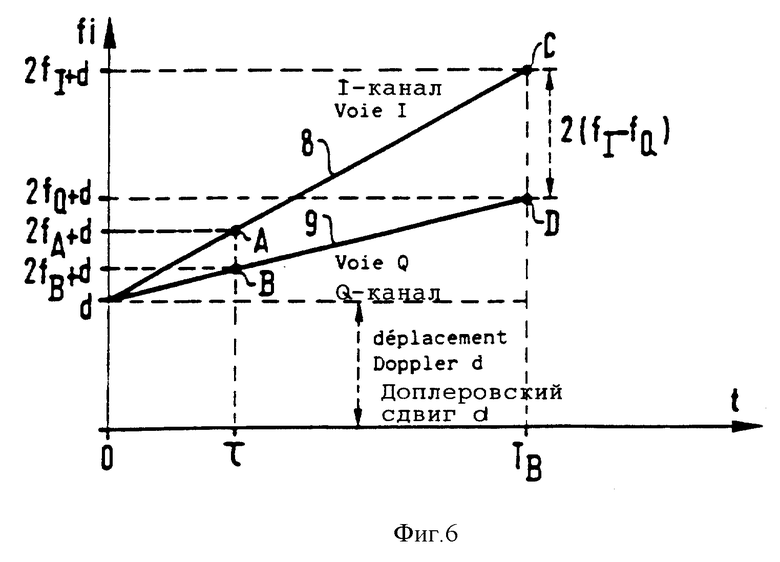
Мгновенные частоты сигналов, связанных с 1- и Q-каналами приемника, полученные после демодуляции пакетного сигнала FCCHd, принятой в предварительно определенное время, претерпевают доплеровский сдвиг d, как соответственно показано графиками 8 и 9 на фиг. 6.
Графики на фиг. 5 и 6 соответствуют наиболее общему случаю, и это обстоятельство будет объяснено ниже.
Практичной и полезной особенностью изобретения является то, что один из двух угловых коэффициентов, соответственно связанных с двумя прямолинейными сегментами, представляющих изменение мгновенной частоты, может равняться нулю на протяжении длительности пакетного сигнала FCCHd.
Это упрощает установку и будет детально описано ниже после описания предпочтительной формы обработки для общего случая, представленного на фиг. 5 и 6.
На фиг. 7 представлена диаграмма, показывающая состав во времени многокадрового пакета сигнализации, передаваемого базовой станцией во временном интервале ("слоте") TN0 на несущей частоте BCH.
Многокадровый пакет (сверхцикл) такого рода состоит из 51 кадра по 8 пакетных сигналов. Логические каналы FCCHd и SCH введены следующим образом:
- пакетный сигнал FCCHd всегда предшествует пакетному сигналу SCH, и они разделены восемью последовательными пакетами, т.е. одним кадром;
- пакетный сигнал FCCHd отделен от следующего пакетного сигнала FCCHd 80 последовательными пакетами, т.е. десятью кадрами;
- пакетный сигнал SCH также отделен от следующего пакетного сигнала FCCHd 80 последовательными пакетами, т.е. десятью кадрами.
Таким образом, каждый из этих двух логических каналов использует пять пакетов в сверхцикле.
Каждый пакетный сигнал имеет в типовом случае длительность 0,577 мс, так что полный сверхцикл имеет длительность 235,365 мс.
Первая операция, которую терминал должен выполнять для получения доступа к сети через спутники, состоит в приеме пакетного сигнала FCCHd на несущей BCH, которую он выделил. Отслеживание пакетного сигнала FCCHd также позволяет ему удостовериться, что несущая BCH присутствует в выделенной несущей частоте.
Первая операция, которую выполняет подвижный терминал после селекции несущей, которую он считает несущей BCH, состоит в проверке наличия пакетного сигнала FCCHd (поз.10 на фиг. 7) среди первых 80 пакетов, передаваемых на этой несущей.
Ниже поясняется, каким образом присутствие пакета этого вида может быть обнаружено среди других, но в любом случае каждое исследование выполняется путем получения достаточного числа N выборок в двух квадратурных каналах - 1 и Q, например 30 выборок.
N выборок, требуемых для этого процесса, получают за время tA (фиг.7.). На фиг. 7 прием пакетного сигнала показан затенением, этот пакетный сигнал предполагается искомым пакетным сигналом FCCHd 10.
Однако, если даже пакетный сигнал FCCHd 10 обнаружен, как показано на фиг. 7, очевидно, что прием осуществляется в случайный момент времени относительно действительного начала 0 пакетного сигнала FCCHd (фиг. 6).
Для получения доступа к сети терминал должен иметь возможность точной синхронизации в момент начала 0 пакетного сигнала FCCHd.
Для достижения такой синхронизации поэтому необходимо точно определить временной интервал τ, который отделяет начало приема N выборок от реального момента начала 0 пакетного сигнала FCCHd.
В соответствии с изобретением этот временной интервал τ определяется простым расчетом подобных треугольников по правилу нахождения неизвестного члена пропорции следующим образом (см. фиг. 6).
Рассматривая фиг. 6 исключительно с точки зрения геометрии на плоскости, можно получить следующее простое геометрическое соотношение
Длина сегмента OTB известна, она соответствует длительности TB пакетного сигнала. Аналогично сегмент CD, соответствующий разности между (известными) мгновенными частотами в конце пакетного сигнала, соответственно 2fI и 2fQ, также известен. Сегмент AB есть разность мгновенных частот 2fA и 2fB в 1-канале и Q-канале приемника в момент начала приема N выборок. Эта разность просто определяется путем спектрального анализа.
Требуемая длина сегмента Oτ затем просто рассчитывается из уравнения
или, иными словами, по правилу нахождения неизвестного члена пропорции
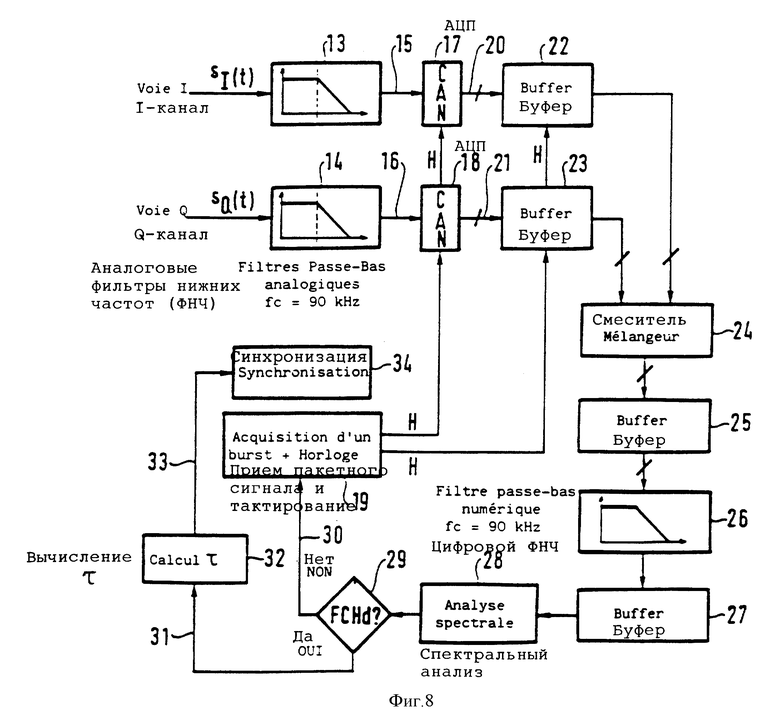
На фиг. 8 показана обобщенная архитектура программных средств, обеспечивающая возможность осуществления всей этой последовательности операций, т. е. прием пакетного сигнала BDHd 10 и синхронизация терминала с этим пакетным сигналом. Эта архитектура будет теперь объяснена более детально.
Как показано на фиг. 8, соответствующий аналоговый сигнал, принятый в полосе модулирующих сигналов в квадратурных каналах 1 и Q, в случае пакетного сигнала FCCHd имеет вид
в 1-канале:
в Q-канале:
где d - вышеупомянутое значение доплеровского сдвига и l - фазовый сдвиг.
Два сигнала SI(t) и SQ(t) прикладываются к соответствующим аналоговым фильтрам нижних частот 13 и 14, частота отсечки fс которых равна рабочей ширине полосы, в данном примере 90 кГц.
Обычной функцией фильтров 13 и 14 является исключение нежелательных интермодуляционных продуктов.
Отфильтрованные сигналы на выходах 15 и 16 аналоговых фильтров 13 и 14 преобразуются в цифровую форму в соответствующих аналого-цифровых преобразователях (АЦП) 17 и 18, которые синхронизированы с частотой дискретизации с помощью тактового сигнала H от блока 19, который является составной частью центрального логического блока терминала.
Две шины 20 и 21 8-битового формата соответственно связывают АЦП 17 и 18 с соответствующими буферами 22 и 23, также синхронизированными тактовым сигналом H.
Обе последовательности операций обработки включают осуществление под контролем блока 19 приема N последовательных выборок каждого из оцифрованных сигналов SI(t) и SQ(t). Этот прием показан схематически на фиг. 7 затененной частью пакетного сигнала FCCHd 10.
Последовательные выборки, принятые буферами 22 и 23, смешиваются попарно в цифровом смесителе или перемножителе 24.
Цифровой сигнал, сформированный в результате этого перемножения, без учета ранее упомянутых коэффициентов пропорциональности, определяется следующим образом:
т.е. после разложения SI(t)•SQ(t)=  в случае пакетного сигнала FCCHd (на этом этапе не известно, является ли принятый сигнал пакетным сигналом FCCHd или нет).
в случае пакетного сигнала FCCHd (на этом этапе не известно, является ли принятый сигнал пакетным сигналом FCCHd или нет).
Этот сигнал SI(t)•SQ(t) затем запоминается в другом буфере 25.
Если принятый пакетный сигнал является не пакетным сигналом FCCHd, а некоторым другим пакетом, например 11 или 12, или пакетом на несущей, не являющейся требуемой несущей BCH, принятый аналоговый сигнал без учета коэффициента пропорциональности будет иметь вид
в 1-канале:
в Q-канале:
где φ(t) - информационный сигнал, передаваемый этим пакетным сигналом.
Произведение SI(t)•SQ(t), сформированное цифровым перемножителем 24 и запомненное по выборкам в буфере 25 равно:
SI(t)•SQ(t) = sin(4πdt+2φ(t)+2l)
В соответствии с изобретением различные выборки произведения SI(t)•SQ(t), запомненные в этом буфере, проходят на цифровой фильтр нижних частот 26, частота отсечки fс которого равна ширине полосы системы, которая в данном примере равна 90 кГц.
Результирующий отфильтрованный сигнал запоминается по выборкам в другом буфере 27 для осуществления спектрального анализа в блоке 28 для определения того, имеется ли в запомненном сигнале спектральная линия на частоте, соответствующей чистой синусоиде в частотном диапазоне, соответствующем полосе модулирующих сигналов (в данном примере от 0 до 90 кГц) или эта спектральная линия отсутствует.
Если отселектированный пакетный сигнал не является пакетным сигналом FCCHd, то полученное вышеупомянутое произведение
соответствует компоненте с частотой, превышающей максимальную частоту (90 кГц) полосы модулирующих сигналов. Эта "высокочастотная компонента" исключается с помощью фильтра нижних частот 26 с тем результатом, что спектральный анализ 28 не обнаруживает какой-либо спектральной линии, а только шум.
Ответ на вопрос "это пакетный сигнал FCCHd?", показанный символически ромбом 29, отрицателен, и блок вычислений 19 получает соответствующую информацию 30, которая подтверждает получение следующего пакетного сигнала.
Если спустя 80 последовательных проверок при данном типе обработки всех пакетов сверхцикла ответ на вопрос, содержащийся в ромбе 29, все еще отрицателен, это означает, что выделенная частота несущей не является несущей частотой BCH базовой станции, и поэтому терминал селектирует другую несущую и вновь пытается обнаружить пакетный сигнал FCCHd.
Если выделенный пакетный сигнал является пакетным сигналом FCCHd, как показано на фиг. 7, высокочастотная составляющая уравнения, приведенного выше, полученная в результате вычисления произведения SI(t)•SQ(t), исключается с помощью фильтра нижних частот 26, в результате чего в буфере 27 запоминается только следующая составляющая:
вновь без учета коэффициента пропорциональности.
Мгновенная частота fi сигнала данного типа представлена производной члена
и поэтому равна
fi = 2(fI - fQ)t/TВ
Точный спектральный анализ, выполненный анализатором 28, обязательно выявит наличие спектральной линии на частоте, соответствующей синусоиде частоты fi, а ответ на вышеупомянутый вопрос в ромбе 29 будет тогда утвердительным: это пакетный сигнал FCCHd.
По линии 31 управляющая информация затем подается в блок 32 для расчета вышеупомянутого времени τ между временем обнаружения и первой выборкой от начала этого пакетного сигнала FCCHd, этот расчет, естественно, выполняется с использованием ранее упомянутого правила нахождения неизвестного члена пропорции.
Как только это время τ определено, блок 32 передает эту информацию по линии 33 на блок синхронизации 34, который синхронизирует соответственно терминал с началом пакетного сигнала FCCHd. На этом этапе терминал синхронизирован по времени, т.е. в нем известно, как определить начало каждого пакетного сигнала.
Описание, изложенное со ссылками на фиг. 7 и 8, равным образом применимо для общего случая (фиг. 6) и довольно предпочтительного частного случая, когда один из двух угловых коэффициентов одного из двух прямолинейных сегментов, представляющих изменение мгновенной частоты передаваемого сигнала, равен нулю, а исходная точка обоих законов изменения частоты совпадает с началом координатных осей, как показано на фиг. 6.
Вторым этапом последовательности действий, выполняемых терминалом, является определение значения доплеровского сдвига частоты d.
Этот второй этап поясняется со ссылками на фиг. 9 в общем случае (фиг. 6) и со ссылками на фиг. 10 в вышеупомянутом частном случае, если один из двух угловых коэффициентов, связанных с соответствующими прямолинейными сегментами, представляющими изменение мгновенной частоты fi, равен нулю.
Для одного квадратурного канала, например 1-канала на фиг. 9, процедура заключается в следующем.
- Дискретизированный прием полного пакетного сигнала FCCHd после фильтрации (ранее описанный фильтр нижних частот 13) и оцифровки (ранее описанный АЦП 17) аналогового сигнала
Например, M= 156 выборок полного пакетного сигнала принимаются таким образом.
Эти M выборок запоминаются в буфере 22, описанном выше (см. фиг. 8)
- Разделение каждой из этих M выборок, принимаемых из буфера 22, между двумя каналами 36 и 37.
- Введение фазового сдвига +90o в сигнал в канале 37 посредством фазовращателя 35.
- Умножение сигнала в канале 36, в котором отсутствует сдвиг фазы +90o, на другой сигнал 39 в первом перемножителе 38; причем другой сигнал 39 синтезирован, оцифрован и дискретизирован центральным блоком терминала и равен без учета коэффициента пропорциональности величине
и соответствует компоненте сигнала FCCHd, как он передан наземной базовой станцией.
- В другом канале 37 умножение сигнала 62, сдвинутого по фазе на +90o в фазовращателе 35, на сигнал 63 во втором перемножителе 40; причем сигнал 63 получают из сигнала 39 сдвигом его по фазе на +90o в другом фазовращателе 64.
В конкретной форме представления сигнал на выходе 62 фазовращателя 35 имеет вид
а сигнал на выходе 63 фазовращателя 64 имеет вид
причем коэффициенты пропорциональности здесь вновь не учитываются, как и в приведенных ниже случаях.
Таким образом, после соответствующих операций перемножения в перемножителях 38 и 40 сигнал на выходе перемножителя 38 имеет вид
а сигнал на выходе 66 перемножителя 60 имеет вид
Остальная часть обработки тогда состоит в следующем.
- Сложение двух только что упомянутых сигналов, присутствующих в линиях 65 и 66, в цифровом сумматоре.
После раскрытия формул и упрощения получаем, что сигнал, полученный на выходе 68 сумматора 67, имеет простую форму
cos(2πdt+l)
- В анализаторе 69, подобном анализатору 38 на фиг. 5, например, осуществляющем быстрое преобразование Фурье, осуществляется спектральный анализ полученного в линии 68 сигнала, причем этот спектральный анализ достаточно точен для исключения аддитивных гауссовых белых шумов.
Это позволяет выделить требуемое абсолютное значение доплеровского сдвига d.
В вышеизложенном описании, разумеется, предполагалось, что доплеровский сдвиг d не изменяется практически в той степени, чтобы повлиять на результаты вышеуказанной обработки в течение времени конкретного пакетного сигнала FCCHd.
Рассмотрим теперь конкретный случай, также представляющий интерес ввиду его относительной простоты, когда пакетный сигнал FCCHd создается базовой станцией таким образом, что характеристика 7 на фиг. 5 является горизонтальным прямолинейным сегментом, совпадающим с временной осью 0t, мгновенная частота fi постоянна и равна нулю на протяжении пакетного сигнала FCCHd, синтезированного базовой станцией, и определение доплеровского сдвига d в некоторой степени упрощается (фиг. 10).
Сигнал полосы модулирующих частот Q-канала упомянутого приемника имеет тогда вид
SQ(t) = sin(2πdt+l)
Как и в случае, показанном на фиг. 9, M выборок полного пакетного сигнала FCCHd принимаются в Q-канале и заносятся в буфер 23, уже описанный со ссылками на фиг. 8. При этом используются фильтр нижних частот 14 и АЦП 18, уже описанные со ссылками на фиг. 8.
Доплеровский сдвиг d затем просто определяется путем спектрального анализа запомненного сигнала. Анализатор 69 с фиг. 9 может быть также использован в данном случае.
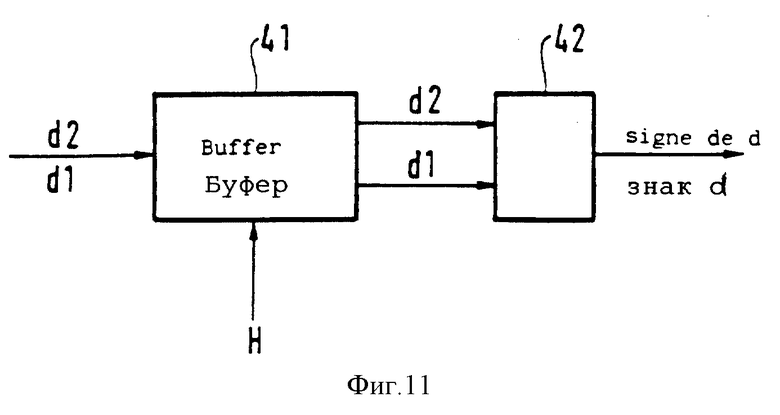
Следующим этапом является определение знака доплеровского сдвига D.
Знак получается определением абсолютного значения двух последовательных доплеровских сдвигов d1 и d2, разделенных временным интервалом от одной до нескольких секунд, достаточным для того, чтобы имелось достаточное время для существенного изменения доплеровского сдвига. Абсолютные значения определяются, как объяснено выше со ссылками на фиг. 9 или фиг. 10.
Оцифрованные абсолютные значения [d1] и [d2] двух доплеровских сдвигов запоминаются в буфере 41 и затем сравниваются в цифровом компараторе 42.
Если результат этого сравнения показывает, что [d2] больше, чем [d1], то спутник движется в направлении от терминала, и, следовательно знак доплеровского сдвига отрицательный.
Если результат этого сравнения показывает, что [d2] меньше, чем [d1], то спутник перемещается в направлении к терминалу, и, следовательно, знак доплеровского сдвига положителен.
Если сравнение показывает, что [d2] фактически равно [d1], что может произойти чрезвычайно редко, то спутник как раз проходит зенит и поэтому будет перемещаться в направлении от терминала. Знак, который должен быть принят во внимание для доплеровского сдвига d, поэтому реально будет отрицательным.
Конечным этапом является компенсация доплеровского сдвига d для сигнала, принятого терминалом, для обеспечения работы терминала.
Доплеровский сдвиг d должен быть скомпенсирован на протяжении всего цикла использования спутника для текущего телефонного разговора. При заданном интервале времени, в течение которого спутник указанного вида находится в зоне видимости, этот интервал составит порядка 10 мин.
Спутник затем выходит из зоны видимости, уходя за горизонт, и проходит передача выполняемой им функции другому спутнику и т.д.
Для обеспечения возможности коррекции непрерывно, и не только в заданное время, доплеровский сдвиг должен отслеживаться на протяжении времени нахождения в зоне видимости и реального использования спутника.
Первый метод, простейший с интеллектуальной точки зрения, но более дорогостоящий при реализации, состоит в измерении терминалом доплеровского сдвига с квазирегулярными интервалами, например каждые 10 с.
Для каждого измерения терминал корректирует частоту гетеродина демодулятора соответственно измеренному доплеровскому сдвигу и настраивает временной интервал между двумя последовательными измерениями соответственно величине измеренного изменения частоты между двумя последовательными измерениями.
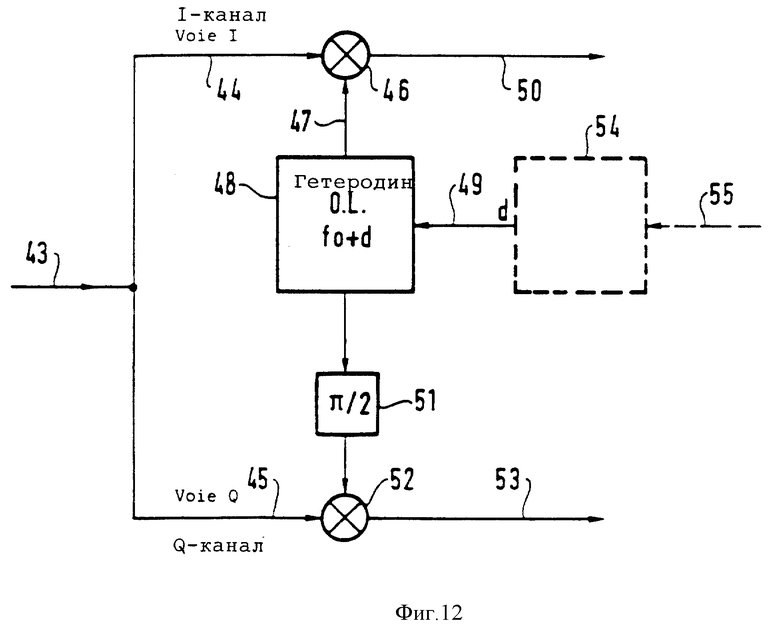
Общая схема системы компенсации или коррекции доплеровского сдвига d показана на фиг. 12.
На фиг. 12 представлена обычная схема для фазовой квадратурной демодуляции аналогового сигнала, принятого терминалом.
Модулированный аналоговый сигнал приемной линии обычным образом разделяется на два канала: 1-канал в линии 44 и Q-канал в линии 45.
Сигнал 1-канала поступает на первый аналоговый смеситель 46, который принимает на своем другом входе 47 сигнал фиксированной частоты от гетеродина 48.
Однако гетеродин является не генератором фиксированной частоты f0, а генератором, управляемым напряжением, получающим на своем управляющем входе напряжение, представляющее доплеровский сдвиг d, определенный терминалом вышеописанным образом.
Частота гетеродина 48 поэтому равна не присущей ему частоте f0, которая бы имела место в отсутствие коррекции доплеровского сдвига, а алгебраической сумме (f0+d) этой частоты f0 и доплеровского сдвига d.
Демодулированный сигнал 1-канала на выходе 50 смесителя 46 поэтому представляет собой демодулированный сигнал, в котором скомпенсирован доплеровский сдвиг.
Аналогично в полном соответствии с общепринятым способом этот сигнал на частоте (f0+d), генерируемый гетеродином 48, прикладывается через обычный фазовращатель 51 на 90o к смесителю 52, на который также поступает сигнал Q-канала и на выходе которого формируется демодулированный сигнал Q-канала.
При этом первом методе сигнал на управляющем входе 49 гетеродина 48, таким образом, формируется непосредственно из значения доплеровского сдвига d, измеренного в процессе коррекции.
Данное решение, однако, связано с относительно высокими затратами, поскольку оно требует вычисления доплеровского сдвига относительно большое число раз.
Второе решение, которое обычно предпочтительнее (см. показанный пунктиром элемент на фиг. 12), состоит в том, что для формирования доплеровской коррекции d, прикладываемой к управляющему входу 49 гетеродина 48, обеспечивается коррекция в реальном времени с помощью логического устройства 54 для автоматического отслеживания доплеровского сдвига d в соответствии с известным смещением используемого спутника и ограниченного числа измерений доплеровского сдвига, вычисляемого, как описано выше, и вводимого в логическое устройство 54 через его входную логическую схему (ключ) 55.
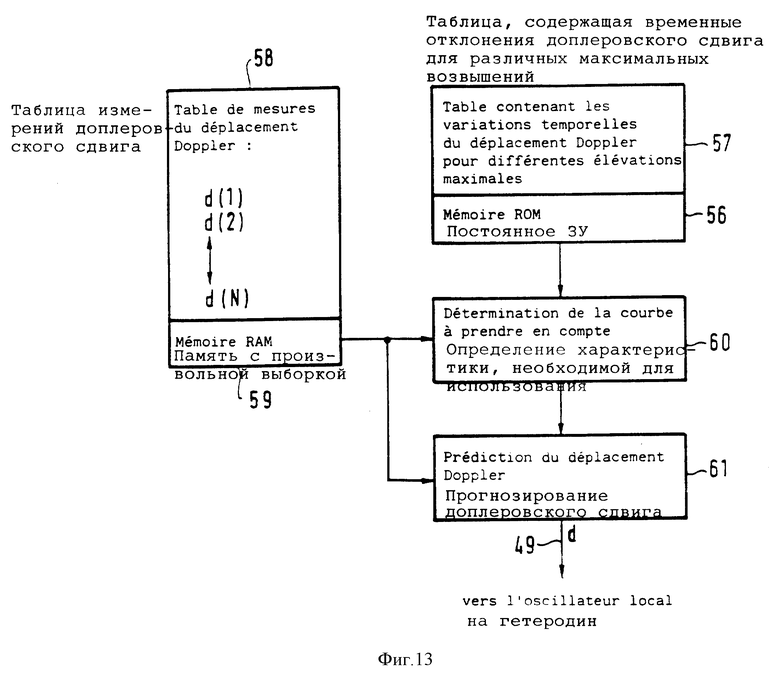
Выполнение и работа логического устройства 54 для автоматического отслеживания доплеровского сдвига будут объяснены со ссылками на фиг. 13.
Для данного подвижного терминала изменение значения доплеровского сдвига зависит от его положения относительно траектории движения спутника. При наблюдении из места расположения терминала траектория движения спутника характеризуется параметром, называемым максимальным возвышением (углом места) и определяемым максимальным углом между линией горизонта терминала и линией терминал-спутник. При корректных значениях указанного параметра это максимальное возвышение изменяется от 20 до 90o.
Энергонезависимое постоянное запоминающее устройство (ПЗУ) 56 терминала содержит таблицу 57 известных изменений доплеровского сдвига d для различных максимальных возвышений каждого спутника. Иными словами, в этом энергонезависимом ПЗУ 56 терминал имеет соответствующую характеристику зависимости изменения доплеровского сдвига для каждой конкретной траектории движения каждого спутника (и поэтому для заданного максимального возвышения).
Например, таким образом в ПЗУ могут быть запомнены 70 характеристик, причем разрешение для максимального возвышения может быть принято равным 1o.
При своем включении терминал (блок 58, включающий энергозависимую память с произвольной выборкой 59) измеряет и запоминает N значений доплеровского сдвига: d(1), d(2),... d(N). Число N равно, например, нескольким десяткам. В логическом блоке 60 эти измеренные значения сравниваются с данными, предварительно запомненными в ПЗУ 56. Это дает характеристику изменения доплеровского сдвига, необходимую для использования в данное время, если выполняемые измерения обеспечивают это.
Другой блок вычислений 61 затем прогнозирует и выдает напряжение коррекции доплеровского сдвига d, прикладываемое к гетеродину (по линии 49; сравнить с фиг. 12).
Если упомянутые исходные измерения d(1) - d(N) не позволяют логическому блоку 60 определить предварительно запомненную характеристику, необходимую для использования, терминал выполняет следующую последовательность измерений с помощью логического блока 58.
Следует отметить, что изобретение не ограничено вышеописанным примером выполнения. Напротив, оно может быть реализовано в различных других эквивалентных формах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫБОРА СПУТНИКА ДЛЯ УСТАНОВЛЕНИЯ СВЯЗИ | 1994 |
|
RU2117393C1 |
| СИСТЕМА АСИНХРОННОЙ ВРЕМЕННОЙ ОПТИЧЕСКОЙ СВЯЗИ | 1990 |
|
RU2101867C1 |
| ОПРЕДЕЛЕНИЕ СДВИГОВ ЧАСТОТЫ В СИСТЕМАХ СВЯЗИ | 1997 |
|
RU2195772C2 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ СВЯЗИ ПО ИЗМЕНЯЮЩЕМУСЯ ВО ВРЕМЕНИ КАНАЛУ СВЯЗИ, ПЕРЕДАЮЩЕЕ УСТРОЙСТВО, ПРИЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2158479C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |






Изобретение относится к системам связи и может использоваться в сотовых системах радиосвязи. Достигаемый технический результат - повышение эффективности процедуры синхронизации. Устройство содержит устройство для оценки доплеровского сдвига несущей, предназначенной для передачи пакета сигнализации, содержащего опорный сигнал, модулированный в соответствии с законом модуляции, представляющим собой заданную функцию от времени в пределах пакета сигнализации, устройства для синхронизации с сигналом несущей, устройство для оценки канала передачи с помощью сигнала несущей, терминал подвижной установки радиосвязи, предназначенный для приема пакета сигнализации. 5 с. и 12 з.п. ф-лы, 13 ил.

где fτ определяется спектральным анализом, а fI предполагается большим, чем fQ, средство для синхронизации терминала с началом данного пакета сигнализации, которое определено. этих двух сдвигов для определения направления изменения доплеровского сдвига (d) и, следовательно, его знака.
этих двух сдвигов для определения направления изменения доплеровского сдвига (d) и, следовательно, его знака.
| US 3906364 А, 16.09.75 | |||
| ТРОМБОЭЛАСТО ГРАФ | 0 |
|
SU332818A1 |
| Способ радиосвязи с подвижными объектами в системе связи сотовой структуры | 1989 |
|
SU1626412A1 |
| УСТАНОВКА ДЛЯ ПРИГОТОВЛЕНИЯ БЕТОННОЙ СМЕСИ | 0 |
|
SU337267A1 |
| Устройство для создания постоянного по величине и направлению нагружающего момента | 1974 |
|
SU504122A1 |
