Изобретение относится к сельскому хозяйству, в частности к устройствам для механизации животноводства, и может быть использовано для повышения эффективности подготовки коров к запуску в процессе доения.
Известен манипулятор доильной установки SU 1750511 С1, 30.07.1992, включающий четыре датчика потока молока и механизмы додаивания, выполненные на каждом доильном стакане, а также доильный аппарат, который содержит двухкамерные доильные стаканы с регуляторами вакуума, коллектор с камерами, содержащими молоколовушки.
Известен переносной манипулятор линейной доильной установки RU 2151499 С1, 27.06.2000, который состоит из доильного аппарата, тросом связанного с пневмоцилиндром, который посредством шарнира прикреплен к датчику потока молока, а датчик, в свою очередь, посредством разъемного соединения прикреплен к вакуум-проводу и молокопроводу линейной доильной установки типа АДМ-8.
Однако данные устройства не обеспечивают повышение эффективности подготовки коров к запуску в процессе доения.
Наиболее близким к изобретению является переносной манипулятор линейной доильной установки RU 2221417 С2, 20.01.2004, который состоит из доильного аппарата, тросом соединенного с пневмоцилиндром и посредством молочного шланга и патрубка с блоком управления с источником электрической энергии.
Однако данный манипулятор также не обеспечивает повышения эффективности подготовки коров к запуску в процессе доения.
Задача изобретения - повышение эффективности подготовки коров к запуску в процессе доения.
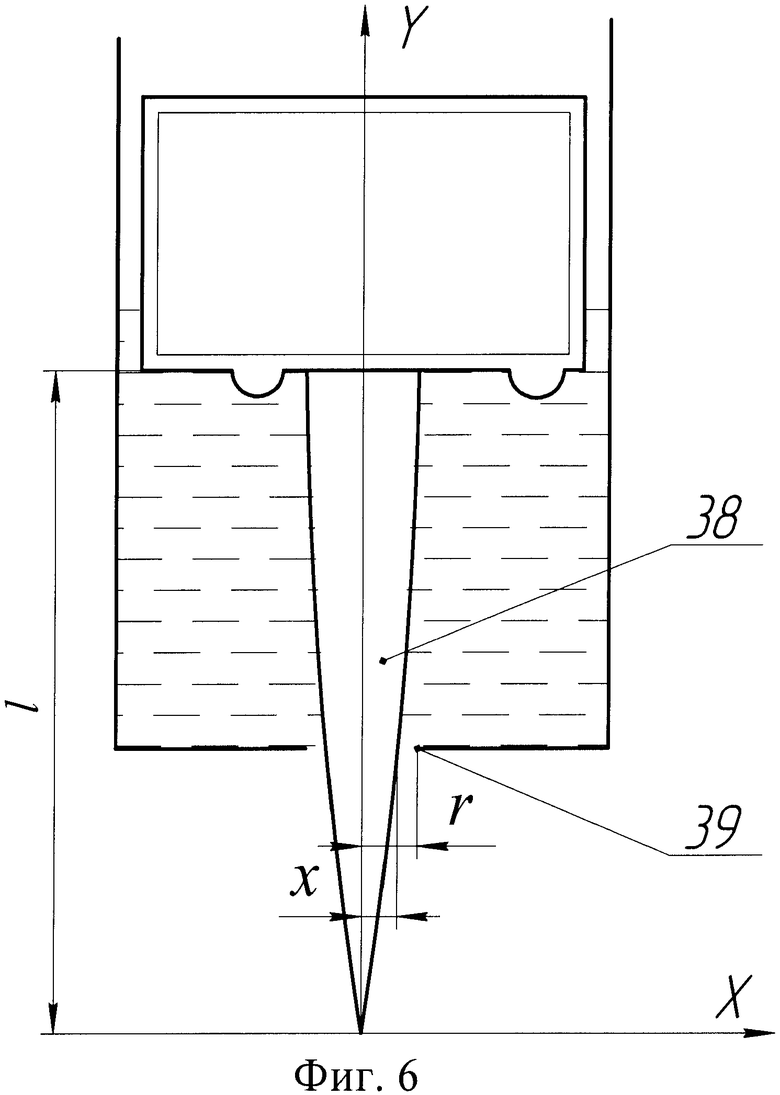
Для достижения этого коллектор содержит рычаг, одним концом взаимодействующий с клапаном отключения доильного аппарата, к свободному концу которого прикреплен трос пневмоцилиндра; полость пневмоцилиндра с вакуум-проводом соединена через пневмоусилитель, камеру управления которого с атмосферой или вакуум-проводом сообщает электрически управляемый трехходовой кран; датчик потока молока выполнен в виде молоколовушки, которая снабжена электродным датчиком уровня молока, протарированным в единицах интенсивности истечения потока молока из молоколовушки поплавком с иглой и магнитом, взаимодействующим с герконом при нижнем его положении в молоколовушке, и установленным с возможностью вертикального перемещения по мере накопления молока в ней на высоту, равную длине иглы, причем для обеспечения линейной зависимости между перемещением иглы в отверстии и расходом молока через отверстие, поверхность иглы выполняют по форме, описываемой уравнением вида
 ,
,
где r - радиус сливного отверстия, м; х, z - текущее значение радиуса иглы по оси X и Z соответственно, м; l - длина иглы, м; гасителем потока молока, выполненным в виде винтового канала, образуемого корпусом молоколовушки, коаксиально установленным с ним цилиндром и спиральной лентой, причем патрубок для подвода молока в молоколовушку установлен тангенциально к ее корпусу, и регулятором вакуумметрического давления в подсосковой камере доильного стакана, камера управления которого через жиклер сообщена с вакуум-проводом, а через калиброванный электроклапан - с атмосферой; трехходовой кран, калиброванный электроклапан, геркон и электродный датчик электрически связаны с электронным блоком с интегратором, реализующим алгоритм подготовки коровы к запуску в процессе доения путем управления режимом доения в зависимости от интенсивности потока молока, контроля удоя и снятия доильного аппарата с вымени коровы при достижении заданного уровня выдоенности в соответствии со сроком подготовки к запуску.
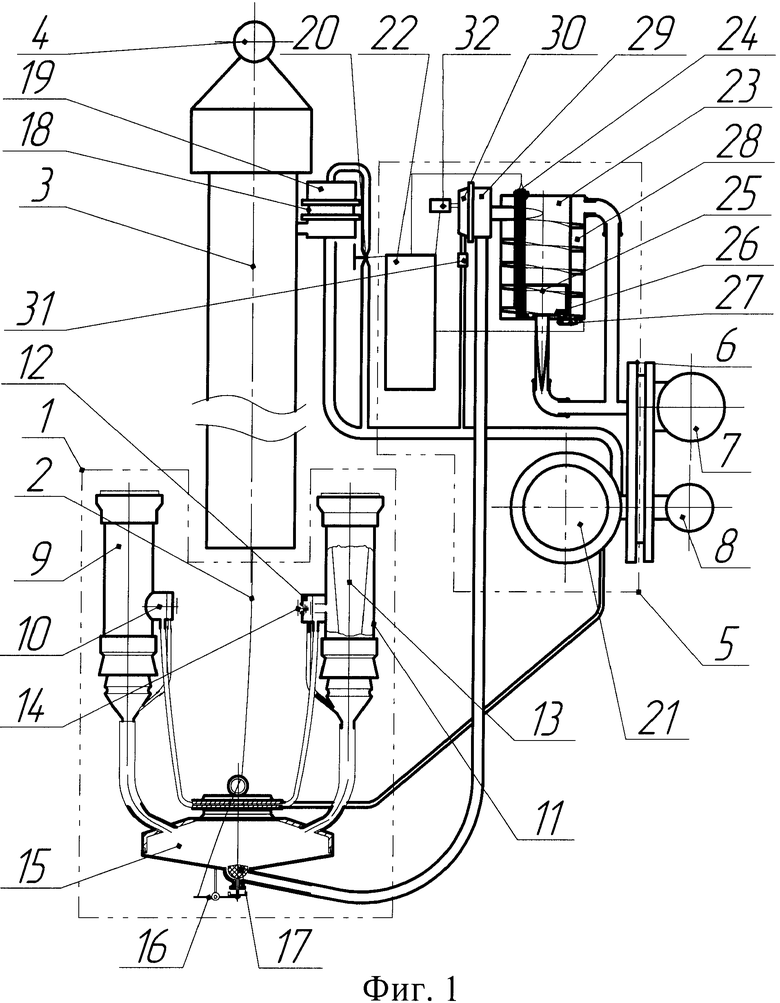
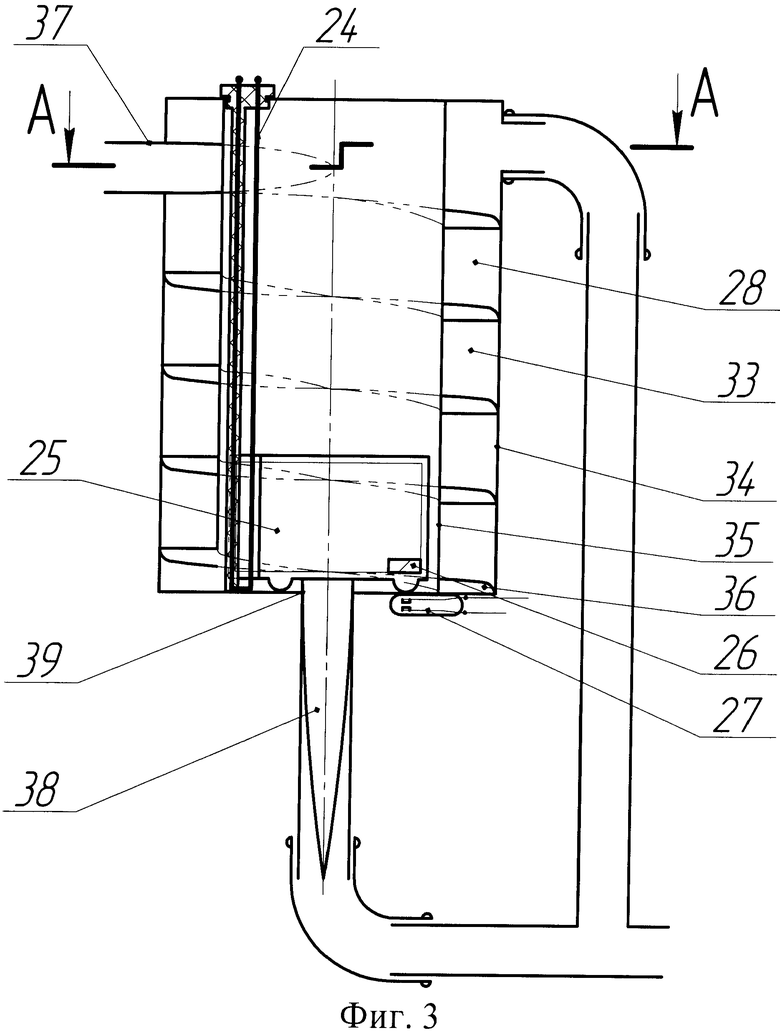
Предлагаемое изобретение будет понято из следующего описания и приложенных чертежей. На фиг.1 приведен переносной манипулятор для подготовки коров к запуску в процессе доения, общий вид; на фиг.2 - алгоритм управления подготовки коров к запуску в процессе доения; на фиг.3 - молоколовушка; на фиг.4 - сечение молоколовушки; на фиг.5 - перемещение поплавка при заполнении молоком молоколовушки; на фиг.6 - к расчету формы поверхности иглы.
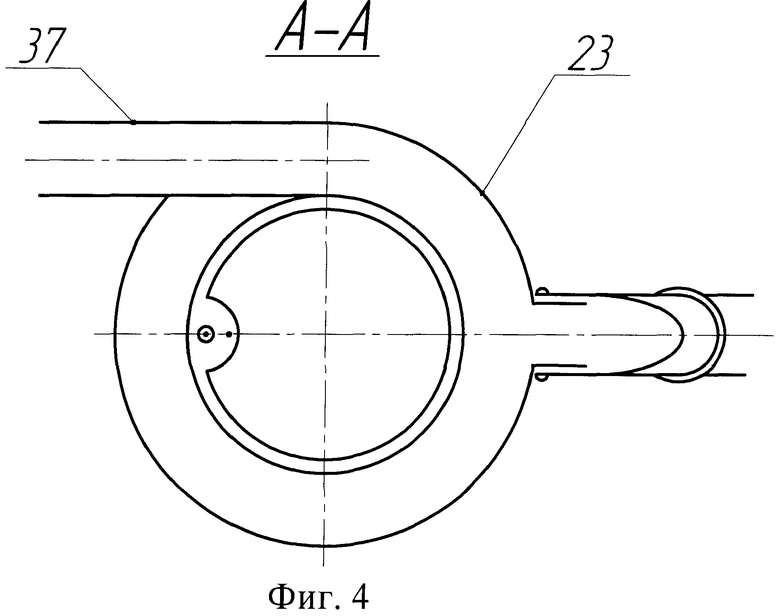
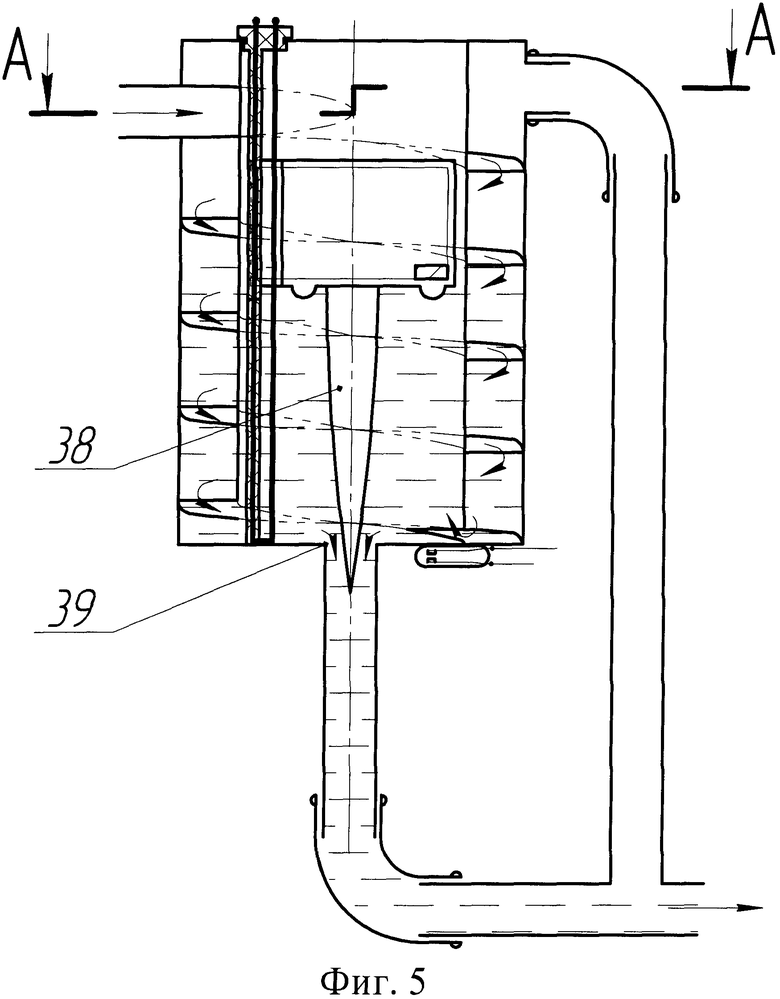
Переносной манипулятор линейной доильной установки (фиг.1) состоит из доильного аппарата 1, тросом 2 связанного с пневмоцилиндром 3, который посредством петли 4 (с возможностью качания) прикреплен к стойке (не показана), и блока управления 5, который посредством разъема 6 подключен к молокопроводу 7 и вакуум-проводу 8 доильной установки, например АДМ-8. Доильные стаканы 9 содержат регуляторы вакуумметрического давления 10 в межстенных камерах 11, управляющие камеры 12 которых сообщены с подсосковыми камерам 13 доильных стаканов 9 и снабжены клапанами 14 для впуска воздуха в подсосоковую камеру 13 в такте сжатия. Коллектор 15 содержит рычаг 16, одним концом взаимодействующий с клапаном 17 отключения доильного аппарата 1, а к свободному концу которого прикреплен трос 2 пневмоцилиндра 3. Полость пневмоцилиндра 3 с вакуум-проводом 8 соединена через пневмоусилитель 18, камеру управления 19 которого с атмосферой или вакуумпроводом 8 сообщает электрически управляемый трехходовой кран 20. Блок управления 5 содержит кнопку «Старт» (не показана), пульсатор 21, электронный блок 22 с интегратором и датчик потока молока, выполненный в виде молоколовушки 23, которая снабжена электродным датчиком 24 уровня молока, протарированным в единицах интенсивности потока молока истечения из молоколовушки 23 поплавком 25 с магнитом 26, взаимодействующим с герконом 27 при нижнем его положении в молоколовушке 23, гасителем потока молока 28 и регулятором вакуумметрического давления 29 в подсосковой камере 13 доильного стакана 9, камера управления 30 которого через жиклер 31 сообщена с вакуум-проводом 8, а через калиброванный электроклапан 32 - с атмосферой. Трехходовой кран 20, калиброванный электроклапан 32, геркон 27 и электродный датчик 24 электрически связаны с электронным блоком 22, реализующим алгоритм подготовки коровы к запуску в процессе доения путем управления режимом доения в зависимости от интенсивности потока молока, контроля удоя и снятия доильного аппарата с вымени коровы при достижении заданного уровня выдоенности (фиг.2) в соответствии со сроком подготовки к запуску. Причем глубина затопления электродного датчика 24 протарирована в единицах измерения интенсивности истечения потока молока из молоколовушки 23. Гаситель потока молока 28 молоколовушки 23 (фиг.1, фиг.3) выполнен в виде винтового канала 33, образуемого корпусом молоколовушки 34, коаксиально установленным с ним цилиндром 35 и спиральной лентой 36, причем патрубок 37 для подвода молока в молоколовушку 23 установлен тангенциально к ее корпусу (фиг.4). Поплавок 25 (фиг.3) в нижней своей части содержит иглу 38. В дне молоколовушки 23 выполнено сливное отверстие 39, перекрываемое иглой 38. Поплавок 25 установлен в молоколовушке 23 с возможностью вертикального перемещения по мере накопления молока в ней (фиг.5) на высоту, равную длине иглы 38, причем для обеспечения линейной зависимости между перемещением иглы 38 в отверстии 39 (поплавка 25 в молоколовушке 23) и расходом молока через отверстие 39, поверхность иглы выполняют по форме, описываемой уравнением вида (фиг.6)
,
где r - радиус сливного отверстия, м; х, z - текущее значение радиуса иглы по оси X и Z соответственно, м; l - длина иглы, м.
Работает манипулятор следующим образом. Манипулятор (фиг.1) посредством петли 4 (с возможностью качания) прикрепляют к стойке (не показана), а посредством разъема 6 подключают к молокопроводу 7 и вакуум-проводу 8 блок управления 5, и согласно алгоритму работы (фиг.2) идентифицируют корову. При этом в электронном блоке 22 активизируется информация о данном животном. Вакуумметрическое давление из вакуум-провода 8 поступает к пульсатору 21 и далее через коллектор 15, регуляторы вакуумметрического давления 10 доильных стаканов 9 - в межстенные камеры 11, а с молокопровода 7 вакуумметрическое давление поступает в молоколовушку 23 и далее через регулятор вакуумметрического давления 29 - к клапану 17 коллектора 15. Нажимают кнопку «Старт» (не показана) на блоке управления 5. При этом электронный блок 22 посредством трехходового крана 20 соединяет камеру управления 19 пульсоусилителя 18 с атмосферой, тем самым обеспечив доступ атмосферного воздуха в полость пневмоцилиндра 3, что приводит к освобождению троса 2. Вытянув трос 2 из пневмоцилиндра 3 и открыв клапан 17 доильный аппарат 1 устанавливают на вымя коровы. При этом вакуумметрическое давление через открытый клапан 17 поступает в коллектор 15 и далее в подсосоковые камеры 13 доильных стаканов 9. Так как в начальный момент при отсутствии молока в молоколовушке 23 поплавок 25 занимает нижнее положение, то магнит 26 поплавка взаимодействует с герконом 27, сигнал от которого поступает в электронный блок 22, который при этом открывает калиброванный электроклапан 32, тем самым сообщив камеру управления 30 регулятора вакуумметрического давления 29 с атмосферой, которая одновременно через жиклер 31 сообщена с вакуум-проводом 8. В результате в камере управления 30, а значит и после регулятора вакуумметрического давления 29 в коллекторе 15 и далее в подсосковых камерах 13 доильных стаканов 9 устанавливается стимулирующее вакуумметрическое давление, например 33 кПа, которое из подсосковых камер 13 также поступает и в камеры управления 12 регуляторов вакуумметрического давления 10 доильных стаканов 9, тем самым ограничив пульсирующее вакуумметрическое давление в межстенных камерах 11, поступающее от пульсатора 21.
Так осуществляют доение в стимулирующем режиме до припуска молока.
Молоко из доильных стаканов 9 (фиг.1) поступает в коллектор 15 и далее через регулятор вакуумметрического давления 29 по установленному тангенциально к корпусу молоколовушки 34 патрубку 37 (фиг.3, 4) и гасителю потока молока 28, выполненному в виде винтового канала 33, образуемого корпусом молоколовушки 34, коаксиально установленным с ним цилиндром 35 и спиральной лентой 36, плавно стекает в молоколовушку 23, заполняя ее. При этом поплавок 25, всплывая в молоке (фиг.5), перемещает иглу 38 в отверстии 39, тем самым образуя щель для слива молока. Так как форма поверхности иглы 38, описываемая приведенным уравнением (фиг.6), такова, что обеспечивает линейную зависимость между перемещением иглы 38 (поплавка) в отверстии 39 интенсивностью потока молока, истекаемого через образуемую щель, то очевидно, что с увеличением интенсивности поступления молока в молоколовушку 23 из доильного аппарата 1 поплавок 25 изменяет свое положение в молоколовушке 23 (фиг.5), тем самым изменяя степень затопления электродного датчика 24, и тем самым изменяя сигнал, поступающий от него к электронному блоку 22 (фиг.1) и отражающий интенсивность истечения потока молока из молоколовушки 23 через щель, образуемую в отверстии 39 иглой 38. Поплавок 25, всплывая в молоке, удаляет магнит 26 от геркона 27 (фиг.5), который при этом подает сигнал электронному блоку 22 о начале процесса поступления молока. В результате в соответствии с алгоритмом управления (фиг.2) электронный блок 22 включает интегратор, осуществляющий контроль интенсивности потока молока через молоколовушку 23, учет текущего надоя, а также осуществляет счет и запоминание числа дней текущего режима доения, сравнивает текущий удой с базовым, осуществляет смену режимов доения и степени выдоенности, выдает сигнал о переводе коровы в запуск по завершению процесса подготовки к запуску в процессе доения.
В процессе доения стимулирующий режим доения (33 кПа) манипулятор сохраняет до интенсивности потока молока - 200 мл/мин (фиг.2). При дальнейшем увеличении интенсивности молоковыведения доильный аппарат 1 переходит на доение в номинальном режиме - 48 кПа. Если время задержки переключения режима доения из стимулирующего в номинальный превышает 1 мин, переключение на номинальный режим осуществляет принудительно электронный блок 22. Для включения номинального режима электронный блок 22 подает сигнал на калиброванный электроклапан 32 (фиг.1), тем самым перекрыв доступ атмосферного воздуха в камеру управления 30 регулятора вакуумметрического давления 29. В результате в камере управления 30 вакуумметрическое давление возрастает до номинального давления, что вызывает синхронное увеличение вакуумметрического давления в подсосковых камерах 13 доильных стаканов 9, управляющие камеры 12 регуляторов вакуумметрического давления 10 доильных стаканов 9, а значит и в межстенных камерах 11. В процессе доения в такте «Сжатие» клапан 14 обеспечивает впуск атмосферного воздуха в подсосковую камеру 13 доильного стакана 9, тем самым повышая эффективность транспортировки молока в молокопровод 7.
Так осуществляют доение в номинальном режиме.
В процессе доения электронный блок 22 (фиг.1) осуществляет контроль текущего удоя и при достижении соответствующей сроку подготовки к запуску степени недодоя в соответствии с алгоритмом (фиг.2) по команде электронного блока 22 трехходовой кран 20 соединяет камеру управления 19 пульсоусилителя 18 с вакуум-проводом 8, в результате чего пульсоусилитель 18 соединяет полость пневмоцилиндра 3 с вакуум-проводом 8. При этом пневмоцилиндр 3 втягивает трос 2, который воздействуя на рычаг 16 коллектора 15 закрывает клапан 17, тем самым отключая доильный аппарат 1, и снимает доильный аппарат 1 с вымени коровы.
Электронный блок 22 сохраняет в памяти информацию о стадии режима подготовки коровы к запуску с учетом текущей дойки.
Манипулятор отключают от молокопровода 7 и вакуум-провода 8. Процесс доения завершен.
Применение данного переносного манипулятора доения коров на доильных установках типа АДМ-8 позволяет повысить эффективность подготовки коровы к запуску, повысить производительность труда на 35-40% и снизить заболеваемость вымени коров маститом на 12-14%.
Источники информации
1. SU 1750511 С1, 5 А01J 7/00, 30.07.1992.
2. RU 2151499 С1, 7 А01J 7/00, 5/007, 27.06.2000.
3. RU 2221417 С2, 7 А01J 5/007, 20.01.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2005 |
|
RU2288577C1 |
| Переносной манипулятор для доения коров | 2017 |
|
RU2649668C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2005 |
|
RU2313937C2 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2008 |
|
RU2367148C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2008 |
|
RU2348149C1 |
| Переносной манипулятор для доения коров | 2018 |
|
RU2695868C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2001 |
|
RU2221417C2 |
| Доильный аппарат адаптивного действия | 2022 |
|
RU2787704C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2801542C1 |

Изобретение относится к сельскому хозяйству, в частности к устройствам для механизации животноводства. Переносной манипулятор линейной доильной установки включает доильный аппарат, тросом связанный с пневмоцилиндром, который посредством петли прикреплен к стойке, и блок управления, который посредством разъема прикреплен к молокопроводу и вакуум-проводу доильной установки, например АДМ-8. Коллектор содержит рычаг, одним концом взаимодействующий с клапаном отключения доильного аппарата, а к свободному концу которого прикреплен трос пневмоцилиндра. Изобретение повышает эффективность подготовки коров к запуску в процессе доения, повышает производительность труда и позволяет снизить заболеваемость коров маститом. 3 з.п. ф-лы, 6 ил.
1. Переносной манипулятор линейной доильной установки, включающий доильный аппарат, тросом связанный с пневмоцилиндром, который посредством петли прикреплен к стойке, и блок управления, который посредством разъема прикреплен к молокопроводу и вакуумпроводу доильной установки, например АДМ-8, отличающийся тем, что коллектор содержит рычаг, одним концом взаимодействующий с клапаном отключения доильного аппарата, а к свободному концу которого прикреплен трос пневмоцилиндра.
2. Переносной манипулятор по п.1, отличающийся тем, что полость пневмоцилиндра с вакуумпроводом соединена через пневмоусилитель, камеру управления которого с атмосферой или вакуумпроводом сообщает электрически управляемый трехходовой кран.
3. Переносной манипулятор по п.1, отличающийся тем, что датчик потока молока выполнен в виде молоколовушки, которая снабжена электродным датчиком уровня молока, протарированным в единицах интенсивности потока молока истечения из молоколовушки, поплавком с иглой и магнитом, взаимодействующим с герконом при нижнем его положении в молоколовушке, и установленным с возможностью вертикального перемещения по мере накопления молока в ней на высоту, равную длине иглы, причем для обеспечения линейной зависимости между перемещением иглы в отверстии и расходом молока через отверстие поверхность иглы выполнена по форме, описываемой уравнением вида
 ,
,
где r - радиус сливного отверстия, м; х, z - текущее значение радиуса иглы по оси Х и Z соответственно, м; l - длина иглы, м;
гасителем потока молока, выполненным в виде винтового канала, образуемого корпусом молоколовушки, коаксиально установленным с ним цилиндром и спиральной лентой, причем патрубок для подвода молока в молоколовушку установлен тангенциально к ее корпусу, и регулятором вакуумметрического давления в подсосковой камере доильного стакана, камера управления которого через жиклер сообщена с вакуумпроводом, а через калиброванный электроклапан - с атмосферой.
4. Переносной манипулятор по п.1, отличающийся тем, что трехходовой кран, калиброванный электроклапан, геркон и электродный датчик электрически связаны с электронным блоком с интегратором, реализующим алгоритм подготовки коровы к запуску в процессе доения путем управления режимом доения в зависимости от интенсивности потока молока, контроля удоя и снятия доильного аппарата с вымени коровы при достижении заданного уровня выдоенности в соответствии со сроком подготовки к запуску.
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2001 |
|
RU2221417C2 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ | 1992 |
|
RU2041622C1 |
| Способ подготовки сухостойных коров к отелу и лактации | 1985 |
|
SU1373384A1 |
| US 5842436 А, 01.12.1998. | |||

