Изобретение относится к сельскому хозяйству, в частности к устройствам для механизации животноводства, и может быть использовано для доения коров.
Известен манипулятор доильной установки SU 1750511 С1, 30.07.1992, включающий четыре датчика потока молока и механизмы додаивания, выполненные на каждом доильном стакане, а также доильный аппарат, который содержит двухкамерные доильные стаканы с регуляторами вакуума, коллектор с камерами, содержащими молоколовушки.
Известен переносной манипулятор линейной доильной установки RU 2151499 С1, 27.06.2000, который состоит из доильного аппарата, тросом связанного с пневмоцилиндром, который посредством шарнира прикреплен к датчику потока молока, а датчик, в свою очередь, посредством разъемного соединения прикреплен к вакуумпроводу и молокопроводу линейной доильной установки типа АДМ-8.
Однако данные устройства не обеспечивают повышения эффективности машинного доения на линейных доильных установках.
Наиболее близким к изобретению является переносной манипулятор линейной доильной установки RU 2221417 С2, 20.01.2004, который состоит из доильного аппарата, тросом соединенного с пневмоцилиндром и посредством молочного шланга и патрубка с блоком управления - с источником электрической энергии.
Однако данный манипулятор также не обеспечивает повышения эффективности машинного доения на линейных доильных установках.
Задача изобретения - повышение эффективности машинного доения на линейных доильных установках.
Для достижения этого электроклапан, а также впускной, выпускной и обратный клапаны клапанной коробки регулятора вакуума снабжены взаимодействующим с ними пружинным механизмом, выполненным в виде двух пружин, установленных симметрично и под углом к штоку клапана, причем зависимость усилия F1 на клапане от его перемещения x описывается выражением

где k - коэффициент жесткости пружины, Н/м;
а - расстояние от штока клапана до точки крепления пружины, м;
l - отклонение пружин от вертикали в исходном положении, м.
Предлагаемое изобретение будет понятно из следующего описания и приложенных чертежей.
На фиг.1 приведен переносной манипулятор для доения коров, общий вид; на фиг.2 - доильный стакан; на фиг.3 - камера управления регулятора вакуума; на фиг.4 - пружинный механизм клапана; на фиг.5 - графическая зависимость усилия на клапане от величины перемещения.
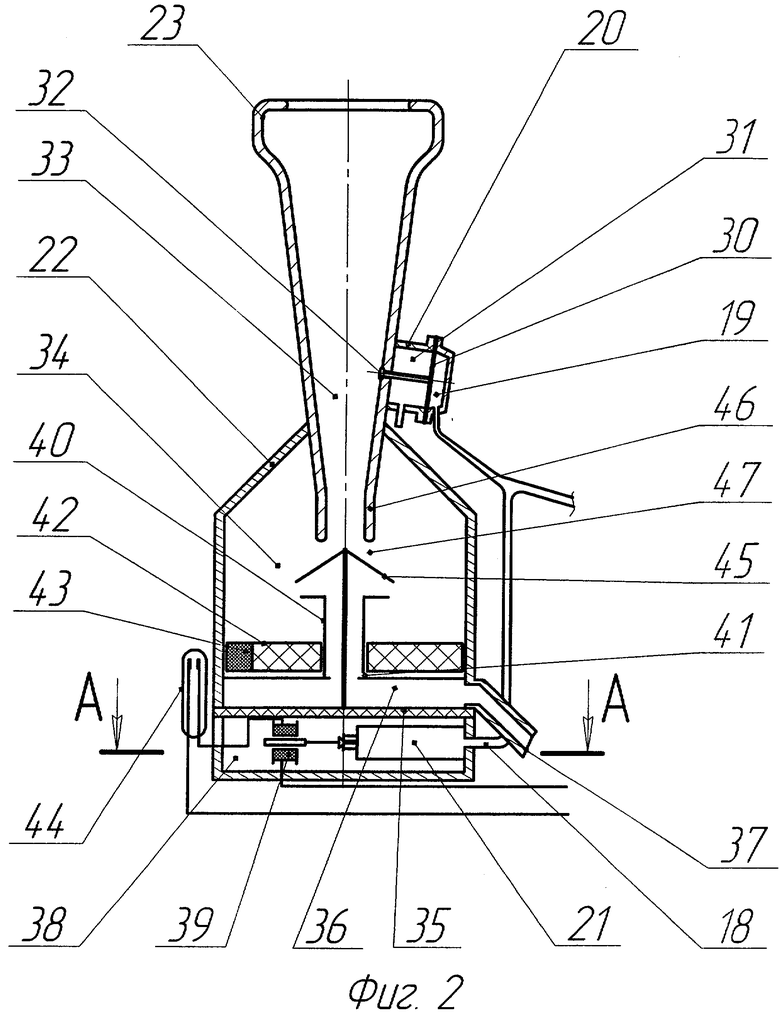
Переносной манипулятор линейной доильной установки (фиг.1) состоит из доильного аппарата 1, тросом 2 связанного с пневмоцилиндром 3, который посредством скобы 4 (с возможностью качания) прикреплен к стойке 5, и блока управления 6, который посредством разъема 7 прикреплен к молокопроводу 8 и вакуумпроводу 9 доильной установки АДМ-8. Блок управления 6 содержит молоколовушку 10 с поплавком (на схеме не показан), обладающую пороговой интенсивностью потока молока начала всплытия поплавка - 50 мл/мин, сообщающуюся с молокопроводом 8 и посредством молочной трубки 11 - с молокоприемной камерой 12 коллектора 13, а также снабженный электрогенератором 14 двухполупериодный пульсатор 15, входным патрубком сообщающийся с вакуумпроводом 9, а двумя выходными - посредством спаренной вакуумной трубки 16 с распределительной камерой 17 коллектора 13 и далее патрубком 18 с камерой управления 19 пневмоклапана 20 и клапанной коробкой 21 регулятора вакуума 22 однокамерного доильного стакана 23. Электрогенератор 14 электрической цепью через геркон 24, установленный на молоколовушке 10 и управляемый постоянным магнитом, смонтированным в поплавке молоколовушки 10, соединен с электропневмоклапаном 25, включенным в разрыв трубопровода 26, предназначенным для сообщения пневмоцилиндра 3 в открытом положении с вакуумпроводом 9, а в закрытом - с атмосферой. Для установки поплавка в стартовое положение молоколовушка 10 снабжена рычагом 27, связанным с поплавком. Трос 2 пневмоцилиндра 3 соединен со свободным концом рычага 28, соединенного с клапаном 29 отключения доильного аппарата. Пневмоклапан 20 (фиг.2) однокамерного доильного стакана 23 выполнен в виде разделенных гибкой мембраной 30 камеры управления 19 и камеры 31 атмосферного давления. Мембрана 30 соединена с клапаном 32, предназначенным для перекрытия сообщения между камерой 31 атмосферного давления и подсосковой камерой 33 доильного стакана 23 и обеспечения дозированного поступления атмосферного воздуха в подсосковую камеру 33 в открытом своем положении. Регулятор вакуума 22 доильного стакана 23 выполнен в виде молоколовушки 34 и разделенных гибкой мембраной 35 молокоотводной камеры 36, патрубком 37 сообщающейся с молокоприемной камерой 12 коллектора 13, и камеры управления 38 с клапанной коробкой 21 и электроклапаном 39. В центре молоколовушка 34 содержит соосно и свободно установленную переливную трубку 40 с выступом в верхней части и с вырезом в нижней для образования с дном молоколовушки 34 калиброванной щели 41 для истечения молока с определенной интенсивностью, например 50 мл/мин, и коаксиально установленный поплавок 42 с магнитом 43. Магнит 43 предназначен для взаимодействия с герконом 44, установленным на молоколовушке 34. В центре мембрана 35 содержит клапан 45, образующий с выпускной трубкой 46 калиброванную щель 47.
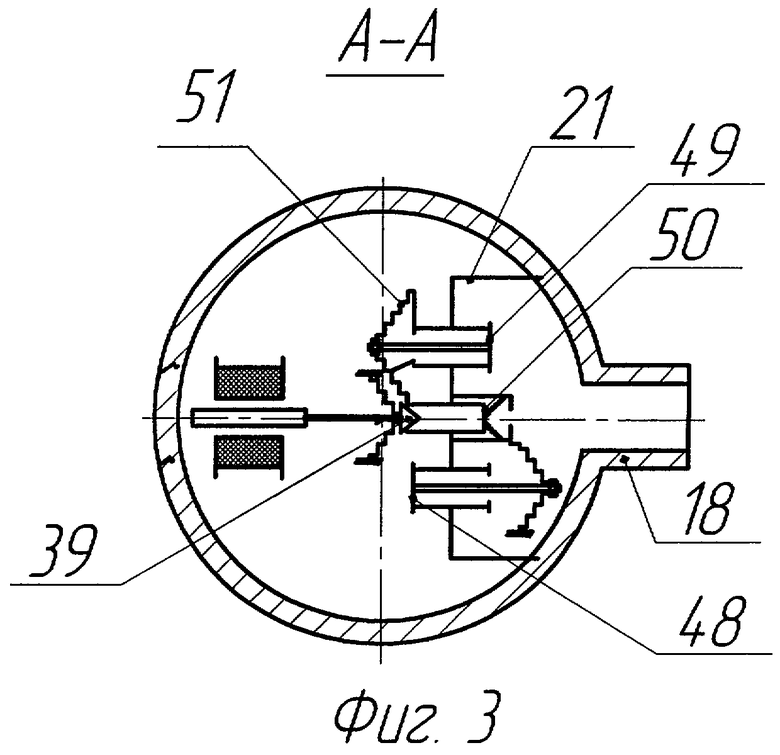
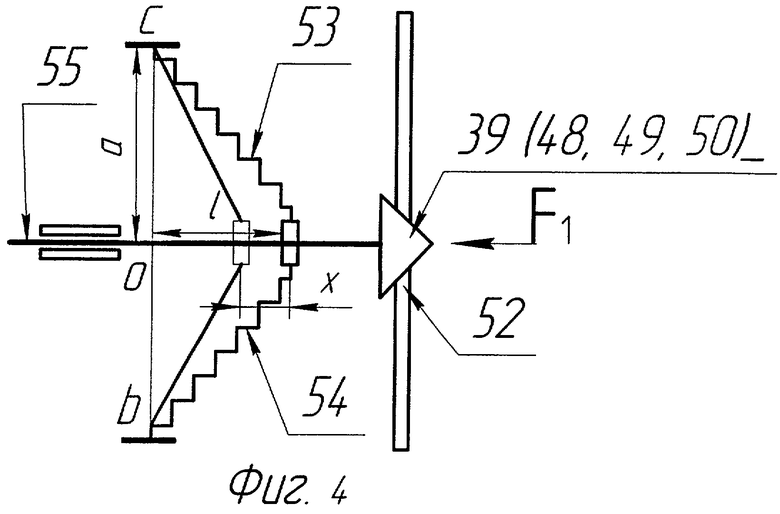
Клапанная коробка 21 (фиг.2, 3) регулятора вакуума 22 содержит впускной 48 и выпускной 49 клапаны (фиг.3), а также обратный клапан 50, закрываемый электроклапаном 39, электрической цепью через геркон 44 связанным с электрогенератором 14. Клапаны 39, 48, 49 и 50 снабжены пружинными механизмами 51, взаимодействующими с ними. Особенность пружинного механизма - обеспечение увеличения, а затем уменьшения до нуля усилия прижатия клапана 39 (48, 49, 50) (фиг.4) по мере его удаления от посадочного гнезда 52. Это стало возможным в результате того, что пружинный механизм 51 выполнен в виде двух пружин 53 и 54, установленных симметрично и под углом к штоку 55 клапана 39 (48, 49, 50). Этим достигается более полное открытие клапанов, а значит, и увеличение его пропускной способности, что, в конечном счете, приводит к ускорению смены режимов работы доильного аппарата, а значит, и к повышению его эффективности.
Зависимость усилия F1 на клапане 39 от его перемещения x (фиг.4) описывается выражением

где k - коэффициент жесткости пружины, Н/м;
а - расстояние от штока 55 клапана 39 до точки b (c) крепления
пружины 53 (54), м;
l - отклонение пружин 53 и 54 от вертикали в исходном положении, м.
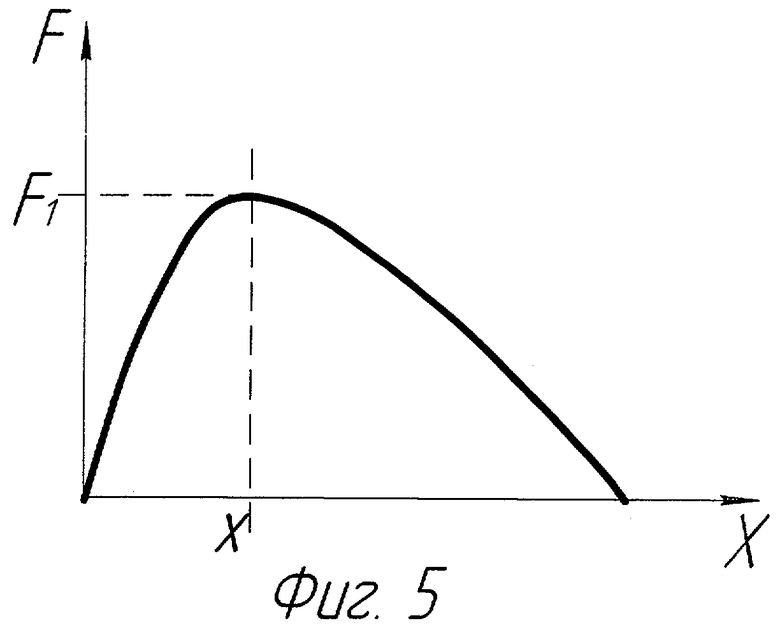
Характер этой зависимости представлен на фиг.5. Приведенное уравнение, а также характеристика, построенная по примеру, приведенному на фиг.5, предназначены для выбора необходимого режима работы пружинного механизма, а также необходимого предварительного сжатия пружин 53 и 54 на величину x, при котором обеспечивается усилие F1 на клапане 39 (фиг 4.), соответствующее заданному давлению его открытия.
Переносной манипулятор работает следующим образом.
Пневмоцилиндр 3 (фиг.1) манипулятора скобой 4 устанавливают на стойку 5, а его блок управления 6 посредством разъемного соединения 7 соединяют с молокопроводом 8 и вакуумпроводом 9 доильной установки (на схеме не показана). При этом вакуумметрическое давление из вакуумпровода 9 распространяется в двухполупериодный пульсатор 15, и далее уже чередующееся с атмосферным вакуумметрическое давление по спаренной вакуумной трубке 16 через распределительную камеру 17 и трубку 18 поступает в камеру управления 19 (фиг.2) пневмоклапана 20 и клапанную коробку 21 регулятора вакуума 22 однокамерного стакана 23. При этом в пневмоклапане 20 мембрана 30, прогнувшись под воздействием разности давлений в сторону камеры управления 19, закрывает клапан 32, тем самым перекрыв сообщение между камерой 31 атмосферного давления и подсосковой камерой 33 доильного стакана 23, а в камере управления 38 регулятора вакуума 22, в результате откачки воздуха через подпружиненный пружинным механизмом 51 с пружинами 53 и 54 (фиг.4.) клапан 49 (фиг.3), устанавливается пониженное вакуумметрическое давление (33 кПа). При смене такта в пульсаторе 15 (фиг.1) атмосферное давление по той же цепочке: трубка 16, распределительная камера 17, патрубок 18 поступает в камеру управления 19 (фиг.1, 2) пневмоклапана 20 и клапанную коробку 21 регулятора вакуума 22. В результате мембрана 30 выравнивается и освобождает клапан 32, который открывает сообщение между камерой 31 атмосферного давления и подсосковой камерой 33 доильного стакана 23, а в камере управления 38 (фиг.2, 3) регулятора вакуума 22, за счет впуска атмосферного воздуха через впускной подпружиненный пружинным механизмом 51 с пружинами 53 и 54 (фиг.4.) клапан 48 (фиг.3), устанавливается остаточное вакуумметрическое давление (10 кПа). Причем характеристика пружинного механизма 51 прижатия клапанов подобрана таким образом, что предварительное значение сжатия пружин x соответствует максимальному значению F1 для этого механизма (фиг.5), тем самым обеспечив уменьшение усилия по мере открытия клапана, а значит, увеличение его пропускной способности, что обеспечивает сокращение времени смены режимов доильного аппарата. Этим обеспечивается повышение его эффективности.
В процессе работы пульсатора 15 (фиг.1) электрогенератор вырабатывает электроэнергию, подводимую по электрической цепи к электроклапану 39 регулятора вакуума и к электропневмоклапану 25. В начальный момент при отсутствии молока в молоколовушке 34 (фиг.2, 3) регулятора вакуума 22 доильного стакана 23 поплавок 42 расположен внизу, и под воздействием магнитного поля магнита 43 геркон 44 разомкнут. В результате этого электроклапан 39 обесточен и пружинным механизмом 51 с пружинами 53 и 54 (фиг.4) прижат к посадочному гнезду. Обратный клапан 50 закрыт. При отсутствии молока в молоколовушке 10 ее поплавок также находится в нижнем положении, и под воздействием магнитного поля магнита, установленного в поплавке, геркон 24 разомкнут и электропневмоклапан 25 обесточен. При этом вакуумметрическое давление из вакуумпровода 9 через электропневмоклапан 25 по трубопроводу 26 поступает в пневмоцилиндр 3, под воздействием которого его поршень втягивает трос 2, удерживая тем самым доильный аппарат 1 в исходном положении.
Одновременно с этим вакууметрическое давление из молокопровода 8 поступает в молоколовушку 10 и далее по молочной трубке 11 к коллектору 13 доильного аппарата 1. Клапан 29 отключения доильного аппарата при этом закрыт.
Рычагом 27 устанавливают поплавок молоколовушки 10 в стартовое положение. При этом магнит поплавка удаляется от геркона 24, и он замыкается, включив питание электропневмоклапана 25, который отключает пневмоцилиндр 3 от вакуумпровода 9 и соединяет его с атмосферой. В результате трос 2 свободно вытягивают из пневмоцилиндра 3, освобождая доильный аппарат 2. Затем открывают клапан 29, и вакуумметрическое давление распространяется в молокоприемную камеру 12 коллектора 13 и далее по патрубку 37 в молокоотводную камеру 36 регулятора вакуума 22, откуда по переливной трубке 40 поступает в молоколовушку 34 и через калиброванную щель 47, образованную установленным в центре мембраны 35 клапаном 45 и выпускной трубкой 46, - в подсосковую камеру 33 доильного стакана 23. Причем, так как в камере управления 38 регулятора вакуума 22 вакуумметрическое давление ниже, чем в молокоотводной камере 36, то мембрана 35, прогибаясь вверх, прижимает клапан 45 к выпускной трубке 46, тем самым затрудняя откачку воздуха из подсосковой камеры 33 доильного стакана 23. В результате в подсосковой камере 33 устанавливается вакуумметрическое давление, зависящее от давления в камере управления 38 регулятора вакуума 22, изменяющегося в соответствии с переключением пульсатора 15. При этом при подаче в клапанную коробку 21 регулятора вакуума 22 и камеру управления 19 пневмоклапана 20 атмосферного давления клапан 32 открыт, и атмосферный воздух дозированным потоком поступает в подсосковую камеру 33 доильного стакана 23, способствуя установлению в ней пониженного вакуумметрического давления, а также, при наличии, транспортировке молока.
Доильный аппарат 1 устанавливают на вымя коровы и начинают процесс доения.
В такте сосания молоко поступает в выпускную трубку 46 доильного стакана 23 и через калиброванную щель 47 стекает в молоколовушку 34, откуда через калиброванную щель 41, образованную переливной трубкой 40 с дном молоколовушки 34, поступает в молокоотводную камеру 36 и далее по патрубку 37 в молокоприемную камеру 12 коллектора 13, откуда через открытый клапан 29 по молочной трубке 11 поступает в молоколовушку 10 и далее в молокопровод 8. При смене такта в пульсаторе 15 (фиг.1) атмосферное давление по цепочке: трубка 16, распределительная камера 17, патрубок 18 поступает в камеру управления 19 (фиг.1, 2) пневмоклапана 20 и клапанную коробку 21 регулятора вакуума 22. В результате мембрана 30 выравнивается и освобождает клапан 32, который открывает сообщение между камерой 31 атмосферного давления и подсосковой камерой 33 доильного стакана 23, а в камере управления 38 (фиг.2, 3) регулятора вакуума 22, за счет впуска атмосферного воздуха через впускной подпружиненный пружинным механизмом 51 с пружинами 53 и 54 (фиг.4.) клапан 48, устанавливается остаточное вакуумметрическое давление (10 кПа). Снижение вакуумметрического давления в камере управления 38 приводит к возрастанию усилия прижатия мембраной 35 клапана 44 к выпускной трубке 46, что при одновременном впуске атмосферного воздуха через клапан 32 приводит к снижению вакуумметрического давления в подсосковой камере 33 доильного стакана 23 и, за счет впуска воздуха, активизации процесса транспортировки молока по указанной цепочке в молокопровод 8. При этом при интенсивности выведения молока из доли вымени не более 50 мл/мин оно не накапливается в молоколовушке 34, и поплавок 42 с магнитом 43 сохраняет свое нижнее положение. При этом геркон 44 разомкнут, и электроклапан 39 обесточен.
Так осуществляют доение каждой доли вымени коровы в отдельности в щадящем режиме.
При возрастании интенсивности потока молока выше 50 мл/мин происходит его накопление в молоколовушке 34, что приводит к всплытию поплавка 42. В результате удаления магнита поплавка 42 геркон 44 замыкается и подается напряжение от электрогенератора 14 к электроклапану 39, который открывает обратный клапан 50, что обеспечивает беспрепятственную откачку воздуха из камеры управления 38, минуя клапан 49, и в то же время исключает поступление атмосферного воздуха из клапанной коробки 21 в камеру управления 38, кроме как через клапан 48. При этом в такте сосания вакуумметрическое давление в камере управления 38 и молокоотводной камере 36 устанавливается одинаковым, что приводит к выравниванию мембраны 35 и, в результате этого, возрастанию вакуумметрического давления в подсосковой камере 33 доильного стакана 23 до номинального значения. В такте сжатия в камере управления 38, а значит, и в подсосковой камере 33 доильного стакана 23, как и при доении в щадящем режиме, сохраняется остаточное вакуумметрическое давление, обеспечивающее удержание доильного стакана на соске. При существенном увеличении интенсивности потока молока в молоколовушке 34 поплавок 42 всплывает выше своего хода. При этом, взаимодействуя с выступом переливной трубки 40, поплавок приподнимает ее, тем самым увеличив щель 41, что приводит к увеличению ее пропускной способности и снижению уровня молока в молоколовушке 34.
Одновременно происходит накопление молока и в молоколовушке 10, поплавок всплывает и освобождает рычаг 27, что приводит к переводу поплавка в следящий режим.
Так проводят доение коровы в номинальном режиме.
При снижении интенсивности потока молока в доильном стакане 23 ниже 50 мл/мин поплавок 42 опускается, и геркон 44 размыкается, обесточив электроклапан 39, тем самым закрыв обратный клапан 50. Снова начинается доение в щадящем режиме.
При снижении общего потока молока от всех доильных стаканов доильного аппарата 1 ниже 50 мл/мин поплавок с магнитом в молоколовушке 10 опускается вниз, геркон 24 замыкается, подключив тем самым электропневмоклапан 25 к электрогенератору. При этом вакуумметрическое давление из вакуумпровода 9 через электропневмоклапан 25 по трубопроводу 26 поступает в пневмоцилиндр 3, под воздействием которого его поршень втягивает трос 2, который за свободный конец рычага 28 закрывает клапан 29, отключает доильный аппарат 1 и снимает его с вымени коровы, зафиксировав в исходном положении. Таким образом, осуществляют доение коров с управляемым режимом доения по каждой доле вымени коров в отдельности и снимают доильный аппарат по завершению доения.
Применение данного переносного манипулятора доения коров на доильных установках типа АДМ-8 позволит повысить производительность труда на 35-40% и снизить заболеваемость вымени коров маститом на 12-14%.
Источники информации
1. SU 1750511 С1, 5 A01J 7/00, 30.07.1992.
2. RU 2151499 С1, 7 А01J 7/00, 5/007, 27.06.2000.
3. RU 2221417 C2, 7 A01J 5/007, 20.01.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2008 |
|
RU2348149C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2005 |
|
RU2288577C1 |
| Переносной манипулятор для доения коров | 2018 |
|
RU2695868C1 |
| Переносной манипулятор для доения коров | 2017 |
|
RU2649668C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2008 |
|
RU2367148C1 |
| Доильный аппарат адаптивного действия | 2022 |
|
RU2787704C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ПОДГОТОВКИ КОРОВ К ЗАПУСКУ В ПРОЦЕССЕ ДОЕНИЯ | 2009 |
|
RU2388216C1 |
| АДАПТИВНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2008 |
|
RU2367147C1 |
| ДОИЛЬНЫЙ АППАРАТ | 2009 |
|
RU2410872C1 |
Изобретение относится к механизации животноводства и может быть использовано при доении коров. Манипулятор включает связанный тросом с пневмоцилиндром доильный аппарат, блок управления и снабженный электрогенератором двухполупериодный пульсатор. Пневмоцилиндр прикреплен скобой с возможностью качания к стойке. Блок управления содержит молоколовушку с поплавком и прикреплен к молокопроводу и вакуумпроводу доильной установки. Молоколовушка молочной трубкой соединена с молокоприемной камерой коллектора. Двухполупериодный пульсатор сообщается с клапанной коробкой регулятора вакуума однокамерного доильного стакана. Клапанная коробка регулятора вакуума содержит впускной, выпускной и обратный клапаны. Обратный клапан закрывается электроклапаном. Впускной, выпускной и обратный клапаны, а также электроклапан имеют пружинные механизмы. Пружинный механизм каждого клапана выполнен в виде установленных симметрично и под углом к штоку клапана двух пружин, что обеспечивает более полное открытие клапанов, ускорение смены режимов работы доильного аппарата и повышение эффективности машинного доения. 5 ил.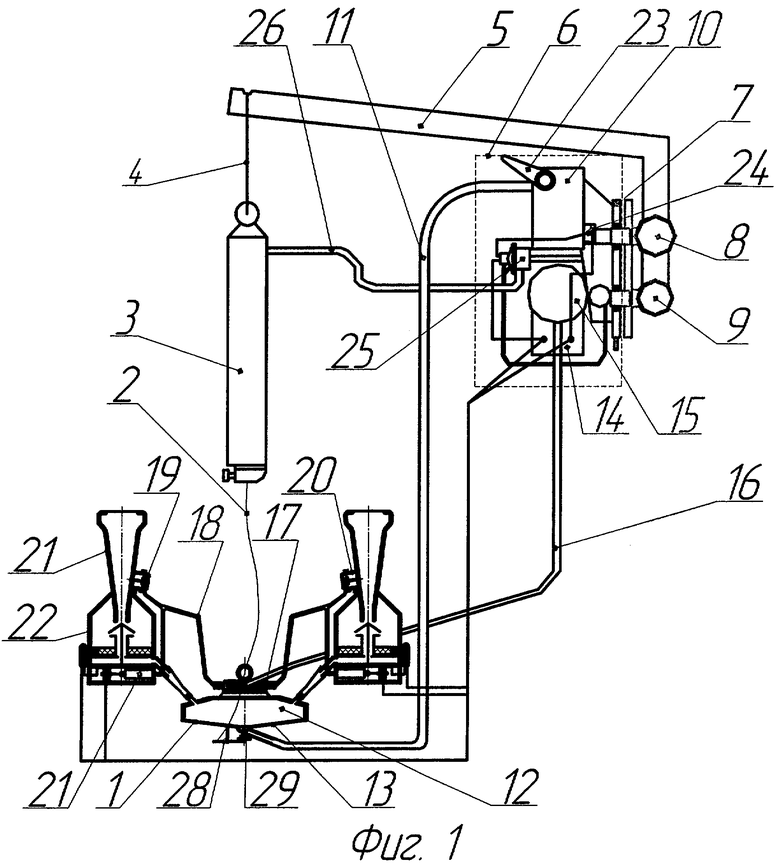
Переносной манипулятор линейной доильной установки, включающий доильный аппарат, тросом связанный с пневмоцилиндром, который посредством скобы с возможностью качания прикреплен к стойке, блок управления, который посредством разъема прикреплен к молокопроводу и вакуумпроводу доильной установки, включающий молоколовушку с поплавком, посредством молочной трубки соединяемой с молокоприемной камерой коллектора, регулятор вакуума с камерой управления и пульсатор с электрогенератором, отличающийся тем, что пульсатор выполнен двухполупериодным, а камера управления регулятора вакуума имеет клапанную коробку с электроклапаном, а также впускным, выпускным и обратным клапанами, снабженными взаимодействующим с ними пружинным механизмом, выполненным в виде двух пружин, установленных симметрично и под углом к штоку клапана, причем зависимость усилия F1 на клапане от его перемещения x, описывается выражением

где k - коэффициент жесткости пружины, Н/м;
а - расстояние от штока клапана до точки крепления пружины, м;
l - отклонение пружин от вертикали в исходном положении, м.
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2001 |
|
RU2221417C2 |
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
| МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ | 1999 |
|
RU2160526C1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 1998 |
|
RU2127972C1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 1991 |
|
RU2036580C1 |
| Манипулятор для доения | 1985 |
|
SU1273038A1 |
| Манипулятор доильной установки | 1990 |
|
SU1750511A1 |
| Манипулятор доильной установки | 1989 |
|
SU1699385A1 |
| US 5606932 A, 04.03.1997. | |||

