Область техники
Настоящее изобретение относится к способу демпфирования вибраций в компонентах турбомашины и устройству для осуществления этого способа, в особенности к способу и устройству, использующему для такого демпфирования преобразователь механической энергии в электромагнитную.
Уровень техники
В эксплуатационных условиях компоненты турбомашины, например лопатки газовой турбины, подвержены воздействию различных сил. Некоторые силы зависят от скорости ротора, например центробежная сила, которая вызывает установившуюся (стационарную) или медленно изменяющуюся деформацию (изменение в размерах, например, растяжение или сокращение) лопатки. Другие силы дают в результате более динамично изменяющуюся деформацию, в общем случае определяемую как вибрационная деформация, и вибрацию лопатки, например вынужденную вибрацию (резонанс или бафтинг) и воздушно-упругую нестабильность (флаттер). Величины сил и результирующих деформаций зависят от условий эксплуатации двигателя и конструктивных и аэродинамических свойств летательного аппарата.
Для предотвращения повреждения лопатки величины стационарных и вибрационных деформаций не должны превышать конструкционных возможностей (пределов) лопатки. Для того чтобы обеспечивать удерживание вибрационных деформаций лопатки в определенных пределах, двигатель часто эксплуатируется при более низких чем оптимальные режимах, что дает в результате пониженное значение эксплуатационного кпд.
Существуют различные подходы для снижения вибрации элементов, имеющих аэродинамический профиль, например, крыльев, лопастей, лопаток. Некоторые из этих подходов предполагают ужесточение конструкции крыла. Эффект ужесточения состоит в изменении резонансной частоты крыла до значения, отличного от частоты вибрационной силы. Увеличенная жесткость помогает предотвратить вибрации типа флаттера. Например, крыло, выполненное с большей жесткостью, дает в результате меньшую вибрацию. Однако более жесткое крыло часто становится тяжелее (с соответствующими недостатками), кроме того, на этапе начального проектирования крыла зачастую точно неизвестно значение оптимального уровня жесткости. В другом подходе используется бандаж, расположенный в середине пролета лопатки. Установка бандажа в середине пролета дает эффект ужесточения лопатки. В дополнение, бандажи взаимодействуют друг с другом для уменьшения вибрации нескольких соседних лопаток. Однако бандаж в середине пролета затрудняет прохождение потока воздуха и тем самым снижает кпд турбомашины.
Пассивное демпфирование вибрации является другим подходом для снижения величины вибрации. Пассивное демпфирование вибрации - это форма конструкционного демпфирования, использующего рассеивание (диссипацию) энергии. Один из методов пассивного демпфирования использует устройства трения скольжения, например, установленные под платформой лопаток. Этот подход основывается на использовании трения для демпфирования вибрационного движения. Однако большая часть вибрационных движений лопатки происходит над платформой, для них расположенные под платформой устройства имеют ограниченную эффективность.
Схема активного регулирования вибраций была предложена в патенте США №4967550. Схема использует систему управления с исполнительными механизмами для противодействия вибрации лопатки. В этом патенте описываются две категории исполнительных механизмов, использующих прямой контакт с лопатками: "(i) вибраторы с электромагнитным приводом, прикрепленные к лопаткам для передачи усилий к лопаткам, и (ii) пьезоэлектрические или магнитострикционные средства внутри лопаток для деформирования их путем изменения соответствующих их характеристик, например, встроенные пьезоэлектрические кристаллы, которые могут искривить лопатку и тем самым повлиять на локальные структурные свойства лопаток, например, путем увеличения конструкционного демпфирования". Пьезоэлектрические материалы преобразуют электрическую энергию в механическую и наоборот. В отличие от пассивных способов активная система управления, иногда называемая системой с обратной связью, является сложной, требует наличия датчиков, схем обработки сигнала, исполнительных механизмов и источника питания. Внедрение пьезоэлектрических кристаллов в лопатку требует использования сложного процесса изготовления. Сочетание системы активного управления и внедренных пьезоэлектрических кристаллов является непрактичным с точки зрения стоимости и сложности.
Сущность изобретения
Задачей настоящего изобретения является создание способа и устройства пассивного демпфирования вибрационных деформаций в компоненте турбомашины, подвергающемся высокой установившейся деформации в стационарных режимах, за счет преобразования механической энергии в электромагнитную без использования активной системы управления.
Другой задачей настоящего изобретения является создание способа и устройства демпфирования вибрации компонента, имеющего аэродинамический профиль, например, лопатки или лопасти с использованием преобразования механической энергии в электромагнитную без использования встроенных исполнительных механизмов.
Настоящее изобретение уменьшает величину вибрационных деформаций в компоненте турбомашины, испытывающем высокую деформацию в стационарном режиме посредством, в случае пассивного варианта выполнения, установки преобразователя, преобразующего механическую энергию в электромагнитную, на внутреннюю и/или внешнюю поверхность компонента, и/или встраивания преобразователя энергии внутрь указанного компонента, и, в случае активного варианта выполнения, посредством установки преобразователя механической энергии в электромагнитную на внутреннюю и/или внешнюю поверхность компонента. Таким образом, при использовании настоящего изобретения в активном варианте выполнения устраняется необходимость во внедренных пьезоэлектрических кристаллах.
Согласно изобретению устройство для демпфирования вибрационных деформаций в компоненте турбомашины, подвергающемся высоким установившимся деформациям, причем вибрационные деформации имеют связанную с ними механическую энергию, содержит преобразователь механической энергии в электрическую, механически связанный с компонентом. Этот преобразователь получает механическую энергию, связанную с вибрационной деформацией компонента, и производит из указанной механической энергии электромагнитную энергию. Устройство содержит также электромагнитную схему, электромагнитным образом связанную с преобразователем энергии и получающую электромагнитную энергию от указанного преобразователя энергии, которая затем рассеивается.
Компонент может иметь поверхность, на которой может быть установлен указанный преобразователь энергии.
Компонентом, в котором осуществляется демпфирование, предпочтительно, является лопасть или лопатка, например вращающаяся лопатка. Лопатка может быть снабжена бандажом и указанный преобразователь механической энергии в электромагнитную может быть прикреплен к этому бандажу.
Преобразователь механической энергии в электромагнитную, предпочтительно, содержит пьезоэлектрический материал, а указанная электромагнитная схема содержит электрическую схему и указанную электромагнитную связь преобразователя механической энергии в электромагнитную, а указанная электрическая схема содержит электрическое соединение.
Компонент, в котором осуществляется демпфирование, может быть снабжен выполненным в виде единого целого держателем и преобразователь механической энергии в электромагнитную может быть расположен в пределах этого держателя.
Предпочтительно, концы держателя прикреплены к компоненту и держатель получает механическую энергию преимущественно через указанные концы.
Преобразователь механической энергии в электромагнитную может содержать преобразующий компонент в виде листа или несколько преобразующих компонентов, расположенных в виде стопки. Он может содержать вязкоупругий материал и получать механическую энергию от компонента через этот вязкоупругий материал.
Преобразователь механической энергии в электромагнитную прикреплен к компоненту способом, обеспечивающим приложение сил сжатия и/или изгиба к указанному преобразователю энергии, для создания предварительно напряженного состояния преобразующего компонента или для приложения сил сжатия, когда компонент подвержен высоким нагрузкам установившегося режима.
Согласно изобретению предложен также способ демпфирования вибрационных деформаций в компоненте турбомашины, подвергающемся высоким установившимся деформациям, включающий преобразование механической энергии, связанной с вибрационными деформациями компонента в электромагнитную, посредством преобразователя, который, будучи механически связанным с компонентом, получает указанную механическую энергию от компонента и преобразует ее в электромагнитную энергию. Затем эта полученная электромагнитная энергия рассеивается с помощью электромагнитной схемы, которая электромагнитным образом связана с указанным преобразователем энергии. Компонент может иметь поверхность, а преобразователь энергии может быть связан с этой поверхностью.
Демпфирование, как оно здесь понимается, определяется как уменьшение вибрационной деформации компонента независимо от того, осуществляется ли оно путем диссипации (рассеивания энергии) или путем ужесточения.
Хотя демпферы пассивной вибрации, использующие преобразование механической энергии в электромагнитную, известны, до сих пор они не использовались для демпфирования вибрации компонентов турбомашины, испытывающих высокие стационарные деформации. Например, применительно к вращающейся лопатке, материалы, в общем случае используемые для пассивного демпфирования, например пьезоэлектрический материал, не рассматривались способными к обеспечению значительного по величине демпфирования, т.е. рассеивания энергии, чтобы представлять практическую ценность для пассивного демпфирования вибрации. Однако в соответствии с настоящим изобретением было установлено, что применительно к некоторым типам вибрации лопатки турбомашины, например, к флаттеру, высокочастотным формам вибрации, необходима лишь небольшая величина демпфирования. Было далее установлено, что пассивное демпфирование вибрации с использованием преобразования механической энергии в электрическую может часто обеспечивать достаточное демпфирование, чтобы такое демпфирование считалось эффективным. В некоторых вариантах выполнения, например, такое демпфирование обеспечивает значительное снижение величины воздействия на лопатку, что дает возможность работать двигателю в условиях, близких к оптимальным, и тем самым достичь большего значения кпд турбомашины.
Несмотря на то, что системы, использующие преобразование механической энергии в электромагнитную, известны, до сих пор преобразователи механической энергии в электрическую в таких системах не прикреплялись к поверхности компонента турбомашины, испытывающего высокие нагрузки в стационарных режимах. Например, применительно к вращающейся лопатке преобразователи механической энергии в электромагнитную, предложенные для таких систем, содержали пьезоэлектрические или магнитострикционные средства внутри лопаток, например встроенные пьезоэлектрические кристаллы. Имеется много причин для того, чтобы не прикреплять преобразователь механической энергии в электрическую к поверхности лопатки. Например, во время работы машины лопатка испытывает в стационарных режимах очень высокие деформации растяжения. Пьезоэлектрические материалы обычно содержат керамические типы материалов, и таким образом, они подвержены разрушению, например образованию трещин (перелому), или отсоединению (отрыву) от лопатки, под воздействием этой высокой стационарной деформации растяжения. Более того, величины вибрационных деформаций на наружной поверхности лопатки считаются экстремальными для пьезоэлектрических материалов. Другая причина заключается в необходимости расположения преобразователей механической энергии в электрическую в стороне от воздушного потока, с тем чтобы не нарушать аэродинамическую форму лопатки. Встроенные кристаллы также могут рассматриваться как необходимые для эффективного демпфирования. Однако было установлено, что такие материалы могут быть подходящим образом расположены на лопатках турбомашины или прикреплены к указанным лопаткам для достижения эффективного демпфирования без внедрения этих материалов, в форме кристаллов, в структуру лопатки. Более того, было установлено, что так как вибрационные деформации больше на внешней стороне лопатки, то более эффективное демпфирование вибрации часто возможно, если преобразователи механической энергии в электрическую установлены на внешней поверхности лопатки, а не внедрены внутрь лопатки.
Настоящее изобретение может быть использовано для демпфирования любого типа (формы) вибрации компонента, включая, но без ограничения, флаттер (неустойчивость, вызванная действием аэроупругости), резонанс и тряску (бафтинг) лопаток. Путем уменьшения флаттера, например, лопатка может надежно работать при более высоком давлении, тем самым обеспечивая в результате достижение более высокого кпд.
Краткое описание чертежей
Фиг. 1 изображает в изометрии один тип пьезоэлектрического компонента и электрических проводников, которые могут быть использованы в настоящем изобретении;
Фиг. 2 изображает в изометрии другой тип пьезоэлектрического компонента и электрических проводников, которые могут быть использованы в настоящем изобретении;
Фиг. 3 изображает стопку пьезоэлектрических компонентов типа, изображенного на фиг. 2;
Фиг. 4 изображает в изометрии другой тип пьезоэлектрического компонента и электрических проводников, которые могут быть использованы в настоящем изобретении;
Фиг. 5А изображает в изометрии с частичным разрезом газотурбинный двигатель, в котором может быть использовано настоящее изобретение;
Фиг. 5В изображает в изометрии часть сечения вентилятора, содержащего лопатку вентилятора, с которой может быть использован демпфер в одном или большем количестве вариантов выполнения согласно настоящему изобретению;
Фиг. 6А изображает в виде сбоку возможную форму вибрации лопатки, изображенной на фиг. 5В;
Фиг. 6В изображает в изометрии изгиб лопатки;
Фиг. 6с изображает в изометрии кручение лопатки;
Фиг. 7 изображает в стилизованном виде лопатку, изображенную на фиг. 5В и первый вариант выполнения демпфера согласно настоящему изобретению;
Фиг. 8 изображает в поперечном сечении по линии 8-8 часть лопатки и преобразователь энергии демпфера, изображенного на фиг. 7;
Фиг. 9 изображает в схематичном виде электрические компоненты и соединения демпфера, изображенного на фиг. 7;
Фиг. 10 изображает в поперечном сечении по линии 8-8 часть лопатки, изображенной на фиг. 7, и другой вариант выполнения преобразователя энергии согласно фиг. 7;
Фиг. 11 изображает в поперечном сечении часть преобразователя энергии, показанного на фиг. 10;
Фиг. 12 изображает в изометрии гибкий проводник, который может быть использован в преобразователе энергии, показанном на фиг. 10;
Фиг. 13 изображает в поперечном сечении часть другого варианта выполнения преобразователя энергии, показанного на фиг. 7;
Фиг. 14 изображает в изометрии лопатку, показанную на фиг. 5В, и с другим вариантом выполнения преобразователя энергии согласно фиг. 7;
Фиг. 15 изображает в изометрии лопатку, показанную на фиг. 5В, и с другим вариантом выполнения преобразователя энергии согласно фиг. 7;
Фиг. 16 изображает в плане часть преобразователя энергии, изображенного на фиг. 15;
Фиг. 17 изображает в поперечном сечении в направлении 17-17 часть лопатки и часть преобразователя энергии, изображенные на фиг. 15;
Фиг. 18 изображает в поперечном сечении в направлении 18-18 часть лопатки и часть преобразователя энергии, изображенные на фиг. 15;
Фиг. 19 изображает в поперечном сечении часть лопатки, изображенной на фиг. 5В, в другом варианте выполнения, и с преобразователем энергии согласно фиг. 7 в другом варианте выполнения;
Фиг. 20 изображает в поперечном сечении часть лопатки, изображенной на фиг. 5В, в другом варианте выполнения, и с преобразователем энергии согласно фиг. 19;
Фиг. 21 изображает в поперечном сечении часть лопатки, изображенной на фиг. 5В, в другом варианте выполнения, и с преобразователем энергии согласно фиг. 7;
Фиг. 22 изображает в изометрии пару соседних лопаток вентилятора, механически соединенных бандажом, с которым может быть использован демпфер согласно настоящему изобретению в одном или большем количестве вариантов выполнения;
Фиг. 23 изображает в поперечном сечении в направлении 23-23 часть лопаток и бандаж, изображенные на фиг. 22, и преобразователь энергии по фиг. 7 в другом варианте выполнения, показано нерабочее состояние вентилятора;
Фиг. 24 изображает в поперечном сечении лопатки, бандаж и преобразователь энергии, изображенные на фиг. 23, в рабочем состоянии вентилятора.
Сведения, подтверждающие возможность осуществления изобретения
Настоящее изобретение предназначено для применения в области турбомашин, для использования, например, при решении проблемы вибрации лопаток турбомашины, например, лопаток ротора или направляющего аппарата (лопаток статора). Для достижения этого в настоящем изобретении используется класс материалов, преобразующих механическую энергию в электромагнитную (т.е. в электрическую и/или в магнитную) энергию и наоборот. Эти материалы определяются здесь как преобразующие энергию материалы.
Некоторые характеристики пьезоэлектрических материалов, относящихся к демпфированию вибрации в лопатке турбомашины, объясняются относительно обобщенного пьезоэлектрического компонента, изображенного на фиг. 1. Как показано на фиг. 1, компонент 40 содержит блок 42 пьезоэлектрического материала. Пьезоэлектрические материалы могут преобразовывать механическую энергию (в виде деформации) в электрическую энергию (в виде электрического заряда) и наоборот. Эта характеристика часто называется "пьезоэлектрический эффект". Блок 42 имеет свою электрическую ось 44 и пару физически и электрически противоположных сторон 46, 48 у противоположных концов оси 44. Если компонент 40 соответствующим образом напряжен (деформирован), например растянут или сжат, между противоположными сторонами 46, 48 возникает разность зарядов. Аналогичным образом, если разность зарядов прикладывается между противоположными сторонами 46, 48, в компоненте 40 возникает механическое напряжение. На каждой из противоположных сторон 46, 48 расположены электропроводящие электроды 50, 51 для обеспечения электрической связи с компонентом 40.
Обычно описывают относительную ориентацию между приложенным воздействием и электрической осью 44. Это связано с тем, что величина разности заряда (или деформации), созданная пьезоэлектрическим материалом, относится к величине приложенной деформации (или заряда) через электромеханический коэффициент k связи, величина которого зависит в свою очередь от относительной ориентации между направлением деформации и электрической осью 44. Например, приложенная деформация может быть направлена перпендикулярно 52 направлению электрической оси (иногда это называется поперечный случай), или параллельно 53 направлению электрической оси (иногда это называется продольный случай). Также возможны случаи сдвига и сложные сочетания всех случаев. Поперечный и продольный случаи могут быть альтернативно определены как d31 и d33 соответственно, относительно произвольной прямоугольной системы координат 54, имеющей оси 1, 2 и 3. Первая цифра каждого нижнего индекса обозначает направление электрической оси 44 относительно системы координат. (Обычно компонент ориентируют так, что электрическая ось совпадает с направлением 3 оси). Вторая цифра обозначает направление 52, 53 приложенного воздействия относительно системы координат. Величина коэффициента связи для продольного случая (d33, направление 53 воздействия) в общем случае больше, чем для поперечного случая (d31, направление 52 воздействия).
Ориентация электрической оси конкретного пьезоэлектрического компонента обычно первоначально устанавливается частично в результате процесса, называемого поляризацией. Традиционно, поляризация включает однократное приложение выбранной разности потенциалов между сторонами, которые должны быть электрически противоположными. Относительно друг друга, одна из сторон заряжается положительно, а другая - отрицательно. Это изменяет пьезоэлектрический материал на его кристаллическом уровне (области переориентации) и тем самым устанавливается электрическая ось. На фиг. 2 показан компонент 55, имеющий похожую форму, но другую ориентацию электрической оси 56, т.е. другую поляризацию, чем та, что была применена к компоненту 40 на фиг. 1. Так же, как и с компонентом 40 на фиг. 1, деформация, приложенная к компоненту 55, может быть направлена перпендикулярно 52 (поперечный случай), или параллельно 53 (продольный случай) направлению электрической оси 56.
Процесс поляризации также вызывает изменение физических размеров пьезоэлектрического компонента. Например, при поляризации компонента, изображенного на фиг. 1, компонент увеличивается в размерах вдоль электрической оси и сжимается во всех других направлениях. В некоторых вариантах выполнения настоящего изобретения это явление используется, как описано ниже.
Важно отметить, что параллельная (продольный случай, d33) ориентация традиционно используется в виде стопки 57 электрически соединенных между собой компонентов 58 (см. фиг. 3), а не в виде одиночного компонента (как тот, что показан на фиг. 1, 2). Стопка соответствующим образом сжaта, от конца к концу, для того чтобы не допустить отделение элементов друг от друга. Это традиционно выполняется путем установки и зажима регулируемой струбцины вокруг стопки. Ориентация d33 традиционно используется для активации (например, для деформации маленьких зеркал и в пьезодинамиках) и не используется для демпфирования вибрации. Компонент 60, имеющий другой (менее эффективный) тип ориентации d33, описан в патенте США № 4491761 и изображен на фиг. 4.
Демпфер, выполненный согласно настоящему изобретению, описан применительно к вариантам выполнения для использования с лопаткой вентилятора того типа, что используется в газотурбинном двигателе, изображенном на фиг. 5А. Как показано на фиг. 5А, обычный газотурбинный двигатель 62 содержит компрессор 63, камеру сгорания 64 и турбину 65, соответственно расположенные вдоль продольной оси 66 и помещенные в корпус 67 двигателя. Газ, т.е. воздух, 68 протекает вдоль через двигатель 62, попадая в него на входном конце 69 компрессора 63 и вытекая на выходном конце 70 турбины 65.
Компрессор содержит вентилятор 71, ступень 72 низкого давления и ступень 73 высокого давления. Вентилятор 71 содержит вращающиеся лопатки 74. Каждая из ступеней 72, 73 низкого и высокого давления содержит чередующиеся ряды вращающихся лопаток 75 и неподвижных лопаток 76 (лопаток статора).
Как показано на фиг. 5В, часть 80 секции вентилятора содержит диск 82 вентилятора, имеющий наружную окружную поверхность 83 с пазом 84, в котором установлен хвостовик 86 лопатки 88 вентилятора. Лопатка 88 вентилятора имеет аэродинамический профиль 90, включающий переднюю кромку 92, заднюю кромку 94, засасывающую поверхность (сторону) 96 и нагнетающую поверхность (сторону) 98. Лопатка расположена между расположенными на некотором расстоянии по окружности платформами 100, в которых одна часть лопатки расположена радиально снаружи относительно платформ 100, а другая - радиально внутри относительно платформ 100. Часть, расположенная радиально снаружи, находится на пути газового потока, и получает кинетическую энергию от направленного вдоль оси потока 68 газа. Часть, расположенная радиально внутри, не находится на пути газового потока 68. Пунктирная линия 102 отделяет часть профиля, находящуюся на пути газового потока 68 газа от части, не находящейся на пути газового потока.
Как показано на фиг. 6А, лопатка 88 испытывает воздействие стационарных и вибрационных сил при работе двигателя. Пара пунктирных линий 103, 104 представляет упрощенную иллюстрацию некоторых подобных эффектов этих сил. Во-первых, действие стационарных сил вызывает напряжение в лопатке и растягивает ее в радиальном направлении 106 на величину, обозначенную поз. 105. Во-вторых, вибрационные силы могут вызвать изгиб лопатки и вибрацию назад и вперед в окружном направлении 107. На фиг. 6В показан изгиб в изометрии. Результатом этой вибрации является попеременное растяжение и сжатие поверхностей боковых сторон лопатки. С точки зрения поверхностей, это похоже на вибрационные деформации в радиальном направлении 106. Форма вибрации, описанная здесь, типична для формы вибрации - флаттера, хотя возможно также наличие и других форм вибрации. Лопатка может также испытывать деформации кручения, наподобие тех, что показаны на фиг. 6С. Величина деформации в общем случае изменяется от одного места до другого по сечению лопатки. При отсутствии демпфирования вибрационные деформации могут стать большими и превысить деформации от стационарных сил.
Как показано на фиг. 7, демпфер 108 содержит преобразователь энергии 110, прикрепленный к лопатке 88, и электрическую схему 112. Преобразователь энергии предпочтительно расположен на лопатке в месте, где величина вибрационной деформации значительна, но величины стационарной и вибрационной деформаций не столь велики, чтобы вызвать повреждение преобразователя энергии. В данном варианте преобразователь энергии прикреплен к области на нагнетающей поверхности, над хвостовиком, но за пределами газового тракта. Было установлено, что эта область испытывает значительные стационарные и вибрационные деформации в радиальном направлении 106. Деформация в осевом направлении 114 является относительно небольшой. Однако в зависимости от величины и формы (например, изгиб или кручение, относительные деформации на каждой стороне лопатки) вибрации лопатки в конкретном варианте выполнения может быть желательно альтернативное расположение преобразователя энергии на засасывающей поверхности или расположение трансформаторов энергии на засасывающей поверхности и нагнетающей поверхности лопатки. Следует отметить, что нагнетающая поверхность 98 в общем случае сталкивается с меньшим количеством частиц грязи, чем засасывающая поверхность.
Преобразователь энергии 110 включает а себя один или большее количество преобразующих компонентов 116, каждый из которых содержит преобразующий энергию материал, предпочтительно цирконат и титанат свинца, или композит из пьезоэлектрического керамического материала типа цирконат и титанат свинца. Преобразователи 116 могут быть по существу выполнены в форме блока. В одном варианте выполнения преобразователи имеют форму с размерами порядка 50 мм в длину (в радиальном направлении) и 2,5 - 5 мм толщиной (фиг. 8) (в окружном направлении), однако оптимальная форма (и количество) преобразователей будет меняться в зависимости от размера и формы лопатки и нагрузок, приложенных к ней. В общем случае желательно, чтобы компоненты преобразователя имели размеры, позволяющие им повторять контур лопатки. В варианте выполнения, указанном выше, лопатка имеет размеры порядка 1000 мм длины и 457 мм ширины. Преобразующие компоненты 116 могут быть установлены в держателе 118, выполненном в форме рамы, который физически соприкасается с поверхностями компонентов 116. Держатель 118 предпочтительно выполнен из материала типа полимера.
В этом варианте выполнения преобразующие компоненты 116 расположены так, что направление их электрической оси по существу параллельно окружному направлению. Это представляет расположение d31 (перпендикулярно, поперечный случай) относительно как радиально направленных вибрационных деформаций, так и главной оси стационарной механической деформации (главное направление растяжения лопатки).
Компоненты 116 преобразователя могут быть электрически соединены друг с другом с помощью проводников 120 в пределах преобразователя 110 энергии. В этом случае для достижения большей долговечности рекомендуется использовать несколько дублирующих медных проводников 120 или гибкий листовой проводник. Так как преобразующие компоненты преобразователя обычно имеют большую жесткость, чем держатель 118, перемычки 121 проводников 120 между компонентами 116 и держателем 118 предпочтительно располагают в направлении малых деформаций (например, в осевом направлении), для того чтобы избежать разрывов проводников 120, когда преобразователь энергии 110 испытывает механические воздействия.
Компоненты 116 преобразователя электрически соединены через проводники 122а, 122b с электрической схемой 112, которая может быть расположена как вблизи, так и в отдалении от преобразователя 110 энергии. Так как лопатка 88 испытывает вибрационную деформацию, механическая энергия воздействует на преобразователь 110 энергии и передается к преобразующим компонентам 116 преобразователя. Компоненты 116 преобразуют механическую энергию в электрическую, которая может быть рассеяна в электрической схеме 112, как описано ниже.
Как показано на фиг. 8, как указано выше, в одном варианте выполнения преобразующие компоненты 116 имеют толщину, обозначенную поз. 123, предпочтительно порядка от 2,5 до 5 мм. Электропроводящие электроды 124 (например, металлизированные поверхности) расположены на противоположных сторонах компонентов 116, обеспечивая тем самым электрическую связь с компонентами 116. Преобразующие компоненты 116 обычно поляризуют перед сборкой преобразователя энергии, так что один из электродов 124 на каждом компоненте 116 поляризован положительно, а другой из электродов 124 поляризован отрицательно. Проводники 120 соединяют вместе одноименно поляризованные электроды компонентов 116 преобразователя и предпочтительно содержат проводящие полосы, прикрепленные к внутренним и наружным слоям 126, 128 полимера (как в токопроводящих полосах на печатных платах). Проводники 120 могут в альтернативном варианте содержать непрерывный электрический экран, который может быть прикреплен к слоям полимера. Слои 126, 128 полимера предпочтительно содержат изоляционный материал, например каптон, для создания электрической изоляции преобразователя энергии от лопатки 88. Слои 126, 128 полимера также обеспечивают уплотнение для защиты компонентов 116 преобразователя от окружающей среды снаружи преобразователя 110 энергии. Преобразователь энергии предпочтительно объединен вместе в единый модуль. Это может быть достигнуто путем введения адгезива 130, 131 между слоями 126, 128 полимера и преобразующими компонентами 116 преобразователя. Преобразователь энергии в альтернативном варианте может быть объединен вместе путем помещения всех элементов в должном взаиморасположении в форму и подачу в нее под давлением полимера или адгезивного материала. В качестве еще одного альтернативного варианта слои полимера могут содержать материал, который может быть отформован и отвержден для скрепления преобразователя энергии.
Преобразователь энергии 110 предпочтительно прикрепляется к лопатке 88 таким образом, чтобы сделать максимальным перенос энергии механического воздействия к преобразующему компоненту 116. Для этого обычно используют слой 132 адгезива, например зпоксидного клея, который может передавать энергию механической деформации. Рекомендуется использовать тонкую пленку адгезива, которую можно резать как лист и повторять поверхность лопатки. Предпочтительный процесс для соединения преобразователя энергии с лопаткой включает нанесение слоя адгезива на поверхность лопатки, установку преобразователя энергии на слое адгезива и приложение соответствующего давления и температуры, например помещение в автоклав, для получения желаемого соединения. Может быть также использован любой другой подходящий процесс, включая процесс с использованием струбцины.
В этом варианте выполнения для того чтобы обеспечить максимальный перенос энергии расстояние между компонентами 116 преобразователя и лопаткой вентилятора делают насколько возможно меньшим. Таким образом, слои, расположенные между компонентами 116 преобразователя и лопаткой 88, не должны быть толще, чем это необходимо. В дополнение, преобразователь 110, предпочтительно в максимально возможной практически степени, подгоняется к лопатке 88. Зазор даже в несколько сотых долей миллиметра может существенно затруднить эффективный перенос энергии. Для достижения соответствия каждый из компонентов преобразователя может быть отшлифован для соответствия местной кривизне лопатки. В альтернативном варианте, поверхность лопатки может быть выполнена или обработана так, чтобы на ней был один или большее количество в общем случае плоских участков, подходящих для размещения преобразователя энергии.
Однако в некоторых вариантах выполнения желательно наличие небольшого зазора между компонентами преобразователя и лопаткой. Желательность такого зазора зависит от толщины лопатки и толщины компонента преобразователя. Если компонент преобразователя имеет слишком большую толщину, то он не является хорошим демпфером и зазор ухудшает его работу. Тонкий компонент преобразователя может иногда работать более эффективно при наличии зазора. Зазор предпочтительно заполняется материалом, обеспечивающим увеличение эффективности компонента преобразователя, т.е. если зазор заполнен материалом, имеющим ту же жесткость, что и лопатка, то никакого увеличения эффективности компонента преобразователя не произойдет.
Вдоль кромок преобразователя энергии предпочтительно выполнена галтель 134 для предотвращения от расслоения кромок во время работы двигателя вследствие наличия напряжений растяжения. Галтель может содержать адгезив или любой другой подходящий материал. Радиус и постепенный переход, обеспечиваемые галтелью, уменьшают концентрацию напряжений у кромок преобразователя энергии. Если желательно наличие большей галтели, галтель может быть дополнена подходящим материалом, например силиконовым каучуком, таким как герметик, вулканизирующийся при комнатной температуре. Галтель может иметь каналы для прокладки через нее электрических проводников 122а, 122b. Кромки самого преобразователя 110 энергии могут быть обработаны по контуру для смягчения концентрации напряжений в его углах (не показано). Вогнутый контур в общем случае является наиболее предпочтительным, однако, любой подходящий контур, например, выпуклый, линейный и т.п., также может быть использован.
Размер и вес преобразователя энергии будут обычно зависеть от желаемой величины демпфирования вибрации и эффективности демпфера. Это в свою очередь зависит от общих задач и параметров системы, включая, например, характеристики лопатки. Это также зависит от места расположения преобразователя энергии на лопатке. Вообще говоря, небольшая величина демпфирования может обеспечить значительное улучшение в изменении границ флаттера. Например, достаточное демпфирование может быть обеспечено преобразователем энергии, имеющим вес в 2 - 3% от веса лопатки. Для того чтобы сделать использование компонентов преобразователя эффективным в общем случае желательно иметь большой процент их объема расположенным в месте, где величина воздействий является наибольшей. Однако если компоненты преобразователя имеют слишком большую толщину и/или жесткость, эффективный перенос энергии механического воздействия от лопатки к компонентам преобразователя может быть затруднен.
Как показано на электрической схеме на фиг. 9, каждый преобразующий компонент 116 в составе преобразователя 110 энергии имеет сходство с конденсатором 138, в котором электрическая энергия, наведенная в компоненте преобразователя посредством вибрации, может быть представлена как разность зарядов в конденсаторе 138. Электрическая схема 112, соединенная с преобразователем 110 энергии, может содержать компонент 144 сопротивления или любой другой подходящий элемент для рассеивания наведенной электрической энергии. Такой подход обеспечивает демпфирование в широком диапазоне частот вибрации лопатки.
В вариантах выполнения, использующих компоненты преобразователя на основе цирконата и титаната свинца, электрическая схема 112 может дополнительно содержать индуктивный компонент для создания в сочетании с емкостью 138 преобразующего компонента 116 резонансного контура. Резонансный контур является настроенным полосовым фильтром. В таком варианте выполнения преобразователь энергии имеет частотно зависимые демпфирование и жесткость. Частотная зависимость в свою очередь зависит от параметров компонентов схемы. Далее при наличии резонансного контура вся электрическая энергия не рассеивается в компоненте 144 сопротивления. Вместо этого некоторая часть электрической энергии возвращается в преобразующий компонент с рассогласованием по фазе относительно вибрационных воздействий лопатки. Возвращенная энергия вызывает воздействие в преобразующем компоненте, противодействующее вибрационной деформации лопатки. Это дает в результате изменения в жесткости преобразователя энергии в определенном диапазоне (полосе) частот и уменьшение вибрационных нагрузок в пределах этого диапазона.
Одна из ситуаций, для которой использование резонансного контура является полезным, описана ниже. Высокие вибрационные нагрузки могут возникать в вентиляторе или в другой конструкции, если частота периодической силы совпадает с собственной или основной частотой конструкции. Это называется вынужденной гармонической вибрацией. Величина нагрузок при резонансе определяется величиной силовой функции и массой, жесткостью и конструкционным демпфированием конструкции. Если частота силовой функции является постоянной, уменьшение нагрузок может быть достигнуто путем увеличенного демпфирования или путем изменения собственной частоты конструкции, т.е. путем изменения массы или жесткости, или обоих указанных параметров.
При использования резонансного контура демпфирование может быть настроено (оптимизировано с точки зрения частоты и величины) для конкретного случая применения. Таким образом, желаемое демпфирование может быть достигнуто с меньшим количеством, с меньшими по размеру и/или с меньшими по массе компонентами преобразователя по сравнению с тем же случаем без резонансного контура. Для описания характеристик резонансного контура часто используется безразмерный коэффициент Q, который определяется как: Q = (резонансная частота)/(полоса частот). Большая величина Q дает в результате большую часть электрической энергии, преобразовываемой компонентом преобразователя обратно в механическое воздействие. Следует понимать, что резонансный контур может быть предусмотрен схемной топологией, а не включен в этот вариант выполнения.
При выборе индуктора 146 важно помнить, что проницаемость железа зависит от механического воздействия окрестной области. Таким образом, индуктивный компонент может иметь одну величину индуктивности при одном значении скорости ротора и другую величину индуктивности при другом значении скорости ротора. Таким образом, индуктор 146 должен быть спроектирован так, чтобы он имел желаемое значение индуктивности при ожидаемом уровне механических воздействий. Следует отметить, что индуктор испытывает меньшее механическое воздействие, если он расположен на диске, чем в случае, когда он расположен на лопатке. Тороидальная обмотка может служить наиболее стабильным по величине индуктивности индуктором, но она не обеспечивает эффективного использования массы. Если используется Ш-образный сердечник с зазорами, следует следить за тем, чтобы величина зазора была постоянной. Для выполнения этой задачи может быть использован элемент, выполненный не из ферромагнетика, например клин из каптона.
Активная схема может быть использована на месте индуктивного компонента 146 фиксированного значения. Такая схема может иметь питание от полученной от преобразователя электрической энергии, которая иначе была бы рассеяна в компоненте сопротивления. Схема может содержать операционный усилитель или более предпочтительно высокоэффективные транзисторы в корпусе. Такая схема может иметь меньшую массу, чем индуктор с железным сердечником. Схема может также быть выполнена самонастраиваемой. То есть, она может изменять величину своей индуктивности для большего соответствия месту применения. При такой работе схема может получать информацию о частоте преобразуемой электрической энергии. Одно преимущество самонастройки состоит в том, что характеристики демпфирования могут быть настроены на величину и частоту вибрации, господствующей в данный момент. Это важно лишь отчасти, потому что амплитуда и частота вибрации лопатки зависят от частоты вращения лопатки, и во время работы могут использоваться различные значения частоты вращения.
Электрическая схема может быть расположена вблизи преобразователя энергии, например на лопатке, для того чтобы свести к минимуму длину соединительных проводников. Если схема является слишком большой, чтобы быть размещенной на лопатке, то она может быть расположена на диске или вблизи него, например на окружной наружной поверхности 83 диска. Может быть желательно выбрать преобразователь энергии, обеспечивающий наличие наибольшей возможной емкости, для того чтобы величина индуктора оставалась небольшой. При этом есть выбор из несколько вариантов, описанных ниже.
Следует понимать, что в зависимости от места применения может быть желательна установка более чем одной электрической схемы. Например, в наилучшем по форме варианте выполнения используется одна электрическая схема для демпфирования одной или двух форм вибрации. Однако, если имеется большее число форм вибраций, например десять форм, требующих демпфирования, то может быть уместно использование дополнительных схем рассеивания.
Как показано на фиг. 10, альтернативный вариант выполнения преобразователя 150 энергии содержит преобразующие компоненты 152, функции которых по существу те же самые, что и у компонентов 116 преобразователя 110 энергии в первом варианте выполнения, но эти преобразующие компоненты 152 имеют меньшую толщину, чем компоненты 116. Эти компоненты 152 предпочтительно выполнены в форме листа и определены как имеющие длину (радиальное направление) и ширину (осевое направление), которые существенно больше, чем толщина (окружное направление). В одном варианте выполнения размеры компонентов составляют порядка 50 мм длины (радиальное направление), 50 мм ширины (осевое направление) и 0,5 мм толщины (окружное направление), однако, оптимальная форма (и количество) преобразователей будет меняться в зависимости от размера, формы и деформаций лопатки. Компоненты 152 преобразователя расположены в виде одного или большего количества "слоев" в держателе 154, таком как, например, отформованная заготовка из полимера или из подходящего альтернативного типа материала.
Как показано на фиг. 11, соседние слои компонента 152 преобразователя могут быть расположены так, что их поляризованные направления направлены противоположно (разность в 180°) друг от друга, т.е. положительно поляризованные электроды в одном слое обращены к положительно поляризованным электродам в соседнем слое, отрицательно поляризованные электроды в одном слое обращены к отрицательно поляризованным электродам в соседнем слое. Это расположение компонента 152 облегчает выполнение электрических соединений одноименно поляризованных электродов. Например, непрерывный гибкий электрический проводник 156, такой как показанный на фиг. 12, может быть использован для соединения одноименно поляризованных терминалов, расположенных в соседних слоях. В гибком проводнике могут быть выполнены отверстия 157 для улучшения связи между слоями компонентов 152 преобразователя. В альтернативном варианте преобразующие компоненты 152 могут быть расположены с их поляризованными направлениями, совмещенными друг с другом, как показано на фиг. 13. Однако такое расположение требует наличия слоя 158 электрического изолятора между слоями компонентов 152 для предотвращения электрического контакта между разноименно поляризованными электродами.
Возвращаясь вновь к фиг. 10, преобразователь 150 энергии дополнительно содержит слои 160, 162 полимера, которые выполнены по существу похожими на соответствующие слои 126, 128 полимера (фиг. 8) в преобразователе 110 энергии. Преобразователь может содержать дополнительно слой 164 адгезива и галтели 166, выполненные по существу так же, как и соответствующий слой 132 адгезива (фиг. 8) и галтели 134 (фиг. 8) преобразователя 110 энергии. Кромки преобразователя 150 энергии могут быть обработаны по контуру для смягчения концентрации напряжений в его углах. Как и преобразователь 110 энергии (фиг. 8) в первом варианте выполнения, преобразователь 150 предпочтительно объединен в единый модуль. Для этой цели обычно используются слои адгезива (не показаны) между слоями преобразующих компонентов 152. Размер и вес преобразователя энергии будут обычно зависеть от желаемой величины демпфирования вибрации.
В предпочтительном варианте процесса прикрепления преобразователя 150 энергии на лопатке вначале устанавливают компоненты 152 слоями в держателе 154. Держатель 154 предпочтительно выполнен из термореактивного или химически активизируемого полимерного материала и имеет в начальном виде гибкую форму. Давление прикладывают либо с помощью пресс-формы, выполненной той же формы, что и соответствующая часть лопатки вентилятора, либо путем создания давления газа в камере, как это выполняется при обработке в автоклаве. В результате приложения давления держатель повторяет форму лопатки вентилятора. Во время этого процесса каждый индивидуальный преобразующий компонент 152 может незначительно изгибаться, для того чтобы в большей степени повторять форму лопатки 88 вентилятора. Держатель 154 затвердевает в своей окончательной форме. При необходимости между пакетом элементов преобразователя и лопаткой 88 добавляют слой 164 адгезива. В альтернативном варианте держатель может быть выполнен в окончательной форме без лопатки, например, с использованием вышеописанного процесса и затем с прикреплением к лопатке.
Этот вариант выполнения имеет несколько преимуществ по сравнению с первым вариантом. Элементы преобразующих компонентов 152 имеют меньшую толщину и, как установлено на практике, зачастую более высокого качества, т.е. имеют меньшие размеры и меньшее количество дефектов на единицу объема, чем компоненты 116 (фиг. 8) в первом варианте. Это дает в результате большую прочность на единицу площади. Эти преобразующие компоненты 152 являются также более гибкими, чем компоненты первого варианта, и таким образом их легче приспосабливать к форме лопатки. Таким образом, здесь необязательно осуществлять индивидуальную шлифовку компонентов, или выполнять плоские участки на поверхности лопатки. Далее, более тонкие преобразующие компоненты 152 могут связываться с механическим воздействием более эффективно, чем преобразующие компоненты 116 большей толщины и могут в большей степени воспринимать высокие стационарные деформации. Однако этот вариант может давать в результате меньшее значение общего коэффициента переноса деформации для преобразователя 150 энергии, чем для преобразователя 110 энергии (фиг. 8), ввиду наличия дополнительных слоев клея между слоями преобразующих компонентов 152. Такие слои потенциально препятствуют переносу механических деформаций от лопатки к компонентам 152 преобразователя. Как в первом варианте, следует обратить внимание на выбор и ориентацию материалов. На чертеже показано расположение компонентов 152 в шахматном порядке, однако в альтернативном варианте эти компоненты могут располагаться по существу совмещенными друг с другом.
Преобразователь 150 энергии может быть сконфигурирован для обеспечения любого из различных значений емкости путем попеременного соединения преобразующих компонентов 152 друг с другом параллельно, последовательно, или в сочетании этих двух видов. Следует понимать, что для данного объема преобразователь энергии с компонентами преобразователя толщиной 0,25 мм может обеспечить величину емкости в 100 раз больше, чем емкость, создаваемая преобразователем энергии с толщиной компонентов в 2,5 мм. (Это объясняется тем, что более тонкие компоненты обеспечивают в десять раз меньшие зазоры между электродами компонентов и также позволяют в тот же объем упаковать в десять раз большее количество компонентов, что потенциально дает в результате в десять раз большую совокупную площадь поверхности электрода.) Большая величина емкости позволяет иметь меньший по величине индуктор 146 (фиг. 9) с очевидными преимуществами по весу и расположению.
Работа демпфера, имеющего преобразователь энергии, похожий на преобразователь 150 энергии, была продемонстрирована на лопатке вентилятора размером в 432 мм для предотвращения флаттера. Демпфер имеет следующие параметры:
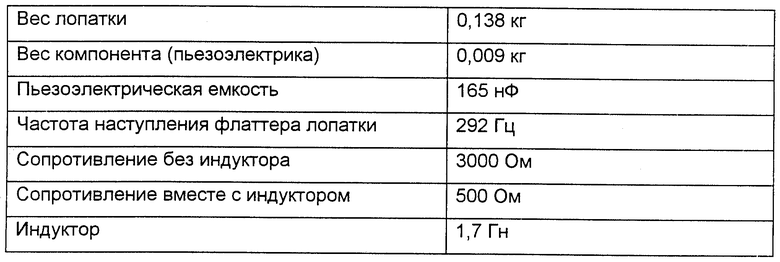
Как показано на фиг. 14, в другом варианте выполнения преобразователь 170 энергии может быть выполнен по существу похожим на преобразователи 110 (фиг. 8), 150 (фиг. 10), описанные выше, но он может быть снабжен пазами 172 в держателе 174. Такие пазы 172 сообщают преобразователю 170 энергии большую гибкость, облегчая тем самым лучшее соответствие форме лопатки 88. Хотя на чертеже компоненты 176 преобразователя изображены больших размеров, чем компоненты 116 (фиг. 8), 152 (фиг. 10), компоненты преобразователя большего размера не требуются.
Как указано выше, при выборе конструкции и места установки преобразователя энергии должна учитываться величина стационарных деформаций. Чрезмерно высокие величины стационарных деформаций в направлении d31 могут ухудшить значение коэффициента электромеханической связи пьезоэлектрического материала. Такие деформации могут также вызывать трещины в пьезоэлектрических компонентах. Следует отметить, что в серийно производимом пьезоэлектрическом материале трещины обычно появляются при деформации в 1000 - 1500 мд (после поляризации). Пьезоэлектрик более высокого качества выдерживает величины деформации до уровня 2000 мд. Однако участок титановой лопатки, расположенный вблизи хвостовика, может испытывать стационарные деформации растяжения уровня 3000 - 4000 мд. Стационарные деформации растяжения могут таким образом превышать предел прочности при растяжении керамического пьезоэлектрика на основе цирконата и титаната свинца приблизительно в 2,5 раза (следует отметить, что титан обычно выдерживает напряжение в 345 МН/м2, в то время как пьезоэлектрический материал на основе цирконата и титаната свинца выдерживает 138 МН/м2).
Для предотвращения образования трещин в пьезоэлектрических компонентах вследствие чрезмерно высоких стационарных деформаций могут использоваться различные подходы. Например, может быть увеличена масса титановой лопатки для уменьшения величины стационарных деформаций. Однако здесь имеется очевидный проигрыш в весе. В альтернативном варианте пьезоэлектрические компоненты могут находиться под действием сил сжатия, которые будут противодействовать постоянным силам растяжения. Один процесс для достижения этого использует силу растяжения лопатки в том же направлении, как и ожидаемая сила постоянного растяжения. Пьезоэлектрические компоненты затем прикрепляют к лопатке. После этого нагрузка устраняется и лопатка возвращается к своей первоначальной (ненагруженной) форме, что дает в результате приложение сжимающей силы к преобразователю 180 энергии и к преобразующим компонентам 182. Величину деформации сжатия предпочтительно выбирают достаточно большой, с тем чтобы сочетание деформации сжатия и стационарной деформации растяжения не превышало возможности пьезоэлектрических компонентов.
Другой подход состоит в использовании зазора, упомянутого выше применительно к фиг. 8, между компонентами преобразователя и лопаткой. Заполнение зазора материалом меньшей жесткости, чем жесткость самой лопатки, может дать в результате меньшую величину стационарной деформации растяжения, передаваемой компонентам преобразователя, но при этом по-прежнему обеспечивать приемлемую передачу вибрационных деформаций.
Как показано на фиг. 15, в другом варианте выполнения демпфера в соответствии с настоящим изобретением преобразователь 180 энергии содержит множество преобразующих компонентов 182. Компоненты 182 преобразователя предпочтительно выполнены в форме блока, но имеют меньшие размеры и толщину (обеспечивая большую величину емкости, как было объяснено выше применительно к преобразователю 150 энергии (фиг. 10)). Компоненты 182 предпочтительно расположены в виде стопок 184, что в некотором роде похоже на стопку 57 на фиг. 3. Стопки 184 могут располагаться в держателе 186. Компоненты 182 в стопке обычно электрически соединены друг с другом. Такое соединение может быть отчасти обеспечено проводниками 188а, 188b.
Стопки 184 предпочтительно расположены так, что направление электрической оси преобразующих компонентов 182 по существу параллельно радиальному направлению. Это соответствует расположению d33 как относительно радиально направленных вибрационных воздействий, так и относительно главной оси стационарного воздействия. Расположение d33 дает в результате небольшое ухудшение или отсутствие ухудшения значения коэффициента электромеханической связи пьезоэлектрика даже в условиях высоких значений стационарных деформаций. Такое расположение также дает в результате более высокое значение коэффициента связи, чем получаемое при расположении d31. Было установлено двукратное улучшение и в идеале возможно и дальнейшее улучшение. В дополнение, модуль (механическая жесткость), обеспечиваемый расположением d33, больше, чем модуль при расположении d31.
К крайним элементам 190 стопок 184 компонентов 182 преобразователя должна быть приложена сила сжатия, так как компоненты в стопке могут отделиться, т.е. отслоиться друг от друга под воздействием значительных по величине деформаций растяжения. Сила сжатия должна быть приложена к каждой стопке, предпочтительно таким образом, чтобы избежать появления любых противоположных (неуравновешенных) воздействий, которые бы могли привести к растрескиванию стопки 184.
Одним способом обеспечения сжатия стопки является во-первых поляризация компонентов, затем растяжение лопатки и прикрепление к ней компонентов. Такой процесс описан выше применительно к расположению d31. В альтернативном варианте стопка 184 из компонентов 182 может быть подвергнута сжатию посредством поляризации ее после того, как преобразователь 180 будет прикреплен к лопатке 88. Как описано выше применительно к фиг. 1, пьезоэлектрический материал обычно расширяется при поляризации. Если преобразователь энергии прикреплен к лопатке до поляризации, компоненты 182 преобразователя не могут расширяться и вместо этого они приобретают состояние сжатия. Напряжение поляризации предпочтительно подбирается для обеспечения желаемых пьезоэлектрических характеристик.
Механическая деформация от лопатки предпочтительно передается стопкам главным образом через концы стопок, а не через их боковые стороны. Это необходимо для того, чтобы избежать противоположных воздействий изгиба стопки. Держатель 186 может обеспечить передачу усилий через концы стопки. При этом держатель должен быть выполнен несколько более жестким, чем держатели 118, 154, 174, используемые в вышеописанных вариантах выполнения, предпочтительно выполненных, например, из такого материала, как титан или жесткий пластик, например графитоэпоксидный композит.
Как показано на фиг. 16, компоненты предпочтительно расположены так, что соседние компоненты имеют противоположные направления поляризации, наподобие расположения соседних слоев компонентов преобразователя в преобразователе 150 энергии, изображенном на фиг. 15.
Это облегчает электрическое соединение компонентов 182 преобразователя в стопке 184. Проводящий слой 192 с электродом 194 в форме лапки может быть расположен между каждой парой соседних компонентов преобразователя в стопке. Проводящий слой 192 электрически соединяет одноименно поляризованные электроды соседних компонентов 182. Выполненные в виде лапок электроды 194, соединенные с положительно поляризованными электродами преобразователя, выступают с одной стороны 196 стопки, тогда как выполненные в виде лапок электроды 194, соединенные с отрицательно поляризованными электродами преобразователя, выступают с противоположной стороны 198 стопки. Лапки на одной стороне 196 электрически соединены с помощью проводника 188а. Лапки на противоположной стороне 198 электрически соединены с помощью проводника 188b.
Тонкие слои адгезива (не показаны) могут быть использованы между компонентами для соединения стопки вместе. В альтернативном варианте стопка может быть образована путем расположения компонентов преобразователя должным образом и их обжига вместе.
Как показано на фиг. 17, 18, обращенная к лопатке сторона 200 преобразователя 180 энергии и стопка 184 могут иметь контур наподобие поверхности лопатки, которая, как показано, может иметь сложный контур (например, кривизну в нескольких направлениях). Между преобразователем 180 и лопаткой 88 может быть нанесен слой 202 адгезива. Однако, как описано выше, для того чтобы избежать противоположных нагрузок в стопке 184, механическое воздействие предпочтительно передается к стопкам 184 главным образом через их концы 190 (фиг. 15), а не через обращенную к лопатке сторону 200 стопки 184. Преобразователь 180 энергии может дополнительно содержать наружный слой 204 полимера для обеспечения защиты компонентов преобразователя 180. Преобразователь 180 предпочтительно выполнен объединенным вместе как единый модуль с использованием, например, одного или большего количества способов, предложенных применительно к описанным выше преобразователям 110, 150, 170 энергии. Преобразователь 180 может содержать дополнительно галтели 206, которые по существу аналогичны галтелям 134 преобразователя 110 энергии (фиг. 8). Кромки преобразователя 180 энергии могут быть обработаны по контуру для смягчения концентрации напряжений в его углах.
Как показано на фиг. 19, в другом варианте демпфера, выполненного в соответствии с настоящим изобретением, лопатка 88 содержит дополнительно держатель 210, выступающий в окружном направлении 107 (фиг. 6А) от поверхности. Держатель 210 предпочтительно имеет одну или большее количество внутренних сторон 212, через которые может быть обеспечена радиальная опора для расположенного вблизи преобразователя 220 энергии. Держатель 210 может иметь форму наподобие формы держателя 186 (фиг. 15, 18), благодаря чему он полностью охватывает преобразователь 220 энергии, хотя это и не требуется. Держатель 210 может быть выполнен как фланец заодно с лопаткой, как показано на чертеже, или в альтернативном варианте может быть выполнен отдельно и прикреплен к лопатке.
Несмотря на то что держатель может быть использован с преобразователем энергии, который по существу является таким же, как и преобразователь 180 энергии (фиг. 15 - 18), этот преобразователь 220 энергии предпочтительно содержит одну или большее количество стопок 222 преобразующих компонентов 224, но без держателя. Стопки 222 выполнены по существу такими же, как и стопки 184 в трансформаторе 180 (фиг. 15 - 18), за исключением того, что преобразующие компоненты 226 на конце стопки могут не иметь электрического соединения с другими компонентами в стопке 222, так что они могут электрически изолировать стопку 222 от держателя 210.
Так же, как и стопки 184 в трансформаторе 180 (фиг. 15-18), стопки 222 предпочтительно располагают в состоянии сжатия, и механическое воздействие предпочтительно передается к стопке через концы 232. Держатель 210 может обеспечить передачу усилий через концы стопки 222. Между внутренними сторонами 229 держателя 210 и преобразователем 220 энергии могут быть установлены прокладки 228. Прокладки 228 должны быть способны к передаче вибрационного воздействия и должны быть выполнены из адгезивного материала, предпочтительно такого типа материала, который расширяется при отвердении.
Преобразователь 220 энергии предпочтительно не находится в контакте с радиально направленной 106 поверхностью лопатки (т.е. дном полости). Слой 230 адгезива может быть нанесен между преобразователем 180 энергии и лопаткой 88, однако, так же как и для стопки 184 преобразователя 180, механическое воздействие предпочтительно передается к стопке 222 главным образом через ее концы 232, а не через обращенную к лопатке боковую сторону 234 стопки 184. Преобразователь 180 энергии может дополнительно содержать наружный слой 236 полимера, который по существу подобен наружному слою 204 полимера преобразователя 180 энергии. Для обеспечения защиты преобразователя энергии во время операций с лопаткой может быть предусмотрен закрывающий элемент 238.
Как показано на фиг. 20, в другом варианте выполнения лопатка содержит держатель 240, выполненный наподобие держателя 210 (фиг. 19), за исключением того, что держатель 240 выполнен в углублении, а не выступая от поверхности лопатки. Держатель 240 имеет внутренние стороны 242, которые по существу такие же, как внутренние стороны 212 держателя 210 (фиг. 19). Такой утопленный держатель 240 особенно хорошо подходит для использования там, где преобразователь 220 энергии в противном случае находился бы на пути потока 68 газа (фиг. 5А, 5В, 7, 15).
Как показано на фиг. 21, в другом варианте выполнения, преобразователь 250 энергии содержит один или большее количество преобразующих компонентов 252 и передатчик 254 вибрации, расположенный внутри держателя 256, прикрепленного к лопатке 88. Компоненты преобразователя, предпочтительно, расположены радиально наружу от передатчика вибрации. Оба указанных элемента имеют возможность перемещения в пределах держателя по меньшей мере в одном направлении. Держатель 256 выполнен предпочтительно в виде контейнера или сосуда, который может быть по существу закрыт.
Компоненты 252 преобразователя могут быть выполнены наподобие любых преобразующих компонентов, описанных выше, но предпочтительно содержат стопку 258, выполненную по существу подобно стопке 184 компонентов 182 преобразователя в преобразователе 180 энергии (фиг. 15 -18). Так же, как и стопки 184 в преобразователе 180 (фиг. 15 - 18), стопка 158 предпочтительно установлена в состоянии сжатия, и механическое воздействие предпочтительно передается к стопке через ее концы 260. Коммуникаторы 262, расположенные на каждом конце 260 стопки 258, могут обеспечить передачу сил к стопке 258 без появления противоположных воздействий, например, изгиба в стопке 258.
Передатчик 254 вибрации предпочтительно содержит внутреннюю структуру 264 и слой 266 вязкоупругого материала, расположенного между внутренней структурой 264 и держателем 256. Вязкоупругие материалы имеют свойство гибкости при деформациях низкой частоты, например стационарных деформациях, но жесткости при деформациях высокой частоты, например вибрационных деформациях. Внутренняя структура может содержать скользящий барьер 268, имеющий наружное уплотнение 270, для того чтобы обеспечивать нахождение вязкоупругого материала внутри передатчика 254 вибрации. Наружное уплотнение может быть выполнено в виде различных типов уплотнений, включая, но не ограничиваясь этими типами, гибкое металлическое сильфонное уплотнение, уплотнительное кольцо, или порог.
Преобразователь 250 энергии электрически соединен с электрической схемой 272. Электрическая схема 272 выполнена по существу такой же, как и электрическая схема 112 (фиг. 7), и может быть расположена на преобразователе 250 энергии или внутри него, например в частично углубленной внутренней части внутренней структуры 264, как показано на чертеже, или в альтернативном варианте, в удаленном за пределы преобразователя 250 месте.
При работе вибрационные и стационарные деформации от лопатки передаются на держатель. Эти воздействия передаются к вязкоупругому слою, который в свою очередь передает только вибрационные деформации к внутренней структуре. Центробежная сила вызывает перемещение внутренней структуры радиально наружу для взаимодействия со стопкой 258. Находясь в контакте со стопкой 258, внутренняя структура передает действие центробежной силы на стопку, обеспечивая тем самым ее состояние сжатия. Масса внутренней структуры предпочтительно выбирается так, чтобы обеспечивать желаемую величину сжатия. Вибрационные деформации передаются от внутренней структуры 264 к преобразующим компонентам 252. Как и в вышеописанных вариантах выполнения, компоненты 252 преобразуют энергию механических воздействий в электрическую энергию, которая может быть рассеяна в электрической схеме 272.
Имеется по меньшей мере два преимущества этого варианта выполнения по сравнению с вышеописанными вариантами. Во-первых, основная установившаяся (стационарная) деформация лопатки не передается компонентам 252 преобразователя (оно разъединено от компонентов 252). Таким образом, деформация растяжения, как результат главной установившейся нагрузке на лопатке, преобразующим компонентам не передается, либо передается лишь небольшая часть воздействия растяжения. Во-вторых, для обеспечения силы сжатия на компонентах преобразователя может быть использована центробежная сила. Это особенно полезно в ситуациях, где желательно нулевое значение деформации растяжения на компонентах преобразователя.
Как показано на фиг. 22, в другом варианте выполнения демпфера согласно настоящему изобретению, бандаж 280 (соединительный элемент) соединяет (связывает) пару соседних лопаток 282, 284 вентилятора. Элементы бандажа в общем случае используются для обеспечения конструкционного ужесточения лопаток, для того чтобы обеспечить уменьшение вибраций лопатки, например вибрации в окружном направлении 107 наподобие описанной применительно к фиг. 6А. Однако в отличие от бандажа 280 по этому варианту выполнения элементы бандажа, используемые в общем случае в настоящее время, не соединяют соседние лопатки, а каждая лопатка имеет свой собственный бандаж и бандажи соседних лопаток касаются друг друга посередине между лопатками. Конструкция с контактом элементов бандажа соседних лопаток дает в результате наличие трения скольжения, уменьшающего вибрацию. При наличии бандажа частота вибрации лопатки становится выше, чем без него, более высокочастотные вибрации вызывают меньше проблем, чем вибрации более низкой частоты. Однако использование бандажа в общем случае дает в результате меньший кпд двигателя. Это снижение кпд может быть обычно уменьшено, если бандаж расположить в месте, обозначенном поз. 286 ближе к хвостовику лопатки, но бандаж, расположенный в месте 286, обычно работает менее эффективно в смысле гашения вибрации, чем бандаж 280.
Как показано на фиг. 23, бандаж 280 имеет радиально внутреннюю поверхность 288 с одним или большим количеством углубленных держателей 290, в каждый из которых может быть установлен один или большее количество преобразователей 292 энергии. Держатели 290 выполнены по существу такими же, как и держатель 240 (фиг. 20), за исключением того, что держатель 290 утоплен в поверхности 288 бандажа 280, а не в поверхности лопатки. Держатель 290 имеет внутренние стороны 294, выполненные по существу такими же, как и внутренние стороны 242 держателя 240 (фиг. 20).
Каждый из преобразователей 292 энергии предпочтительно выполнен по существу таким же, как и преобразователь 220 (фиг. 19) и содержит стопку 296 преобразующих компонентов 298, выполненных по существу наподобие стопок 222 преобразующих компонентов 224. Компоненты 300 преобразователя на концах 302 стопки 296 могут не иметь электрической связи с другими компонентами стопки 296, так что они могут обеспечивать электрическую изоляцию стопки 296 от держателя 290.
Так же, как и стопки 222 в преобразователе 220 (фиг. 19), стопка 296 предпочтительно находится в состоянии сжатия и механическое воздействие предпочтительно передается к стопке через концы 302. Держатель 290 может способствовать передаче усилий к концам 302 стопки 296. Прокладки 304, выполненные по существу таким же, как прокладки 228 (фиг. 19), могут быть установлены между внутренними сторонами 294 держателя 290 и преобразователем 292 энергии.
Преобразователь 292 энергии предпочтительно не имеет контакта с радиально направленной 106 поверхностью лопатки (т.е. с дном выемки). Слой 306, выполненный наподобие слоя 202 в преобразователе 180 энергии (фиг. 15 - 18), может быть расположен между преобразователем 292 энергии и лопаткой 88, но механическая деформация предпочтительно передается к стопке 296 преимущественно через ее концы 302, а не через обращенную к лопатке сторону 308 стопки 296. Преобразователь 292 энергии может дополнительно содержать наружный слой 310 полимера, выполненный по существу таким же, как и наружный слой 204 полимера преобразователя 180 (фиг. 15 - 18). Может быть также предусмотрен закрывающий элемент, наподобие закрывающего элемента 238 (фиг. 19), для обеспечения защиты преобразователя 292 энергии.
Как показано на фиг. 24, во время работы вентилятора вибрация в окружном направлении 107 лопаток 282, 284 вызывает деформации на бандаже 280 в окружном направлении 107. Эта деформация в свою очередь передается, в расположении d33, к преобразующим компонентам 298 преобразователя. Как и в вышеописанных вариантах выполнения, компоненты 298 преобразуют механическую энергию в электрическую энергию.
Центростремительная сила вызывает изгиб бандажа 280 радиально 106 наружу. Так как бандаж 280 соединяет соседние лопатки, изгиб бандажа радиально наружу дает в результате сжатие радиально внутренней поверхности 288 в окружном направлении 117, т.е. в направлении продольной оси бандажа, что тем самым дает в результате возникновение сжимающей силы на стопках 296 компонентов 298 в преобразователе 292 энергии.
Соответствующие подходы могут быть использованы для создания силы сжатия на преобразующих компонентах в других вариантах выполнения. Например, сила сжатия может быть создана путем установки преобразующих компонентов в такое место на лопатке, которое испытывает соответствующий изгиб в условиях установившегося режима.
В любой из вышеописанных вариантов выполнения может быть включена система мониторинга для подтверждения того, что демпфер работает должным образом в течение всего срока службы турбомашины. Система мониторинга может, например, осуществлять контроль за вибрацией, например, флаттером, и определять, не является ли величина вибрации чрезмерной. Система мониторинга может также осуществлять контроль за электрическим импедансом компонентов преобразователя для определения их состояния.
Несмотря на то, что демпфер, выполненный в соответствии с настоящим изобретением, описан как содержащий преобразователь энергии, прикрепленный к наружной поверхности лопатки, очевидно, что преобразователь энергии может в альтернативном варианте находиться на внутренней поверхности пустотелой лопатки, или может быть встроен в лопатку, например в пакет слоев композитного аэродинамического крыла. Следует понимать, что демпфер, выполненный согласно настоящему изобретению, может быть приспособлен для использования с любым типом аэродинамического профиля турбомашины, включая, но не ограничиваясь этим, любой тип лопатки (вращающийся аэродинамический профиль) или направляющей лопасти (не вращающийся аэродинамический профиль). Следует понимать, что для любого конкретного места применения необходимо знание структурной динамики аэродинамического профиля и конкретных сил, вызывающих вибрацию, для того чтобы выбрать лучшую конструкцию и лучшее место установки компонентов демпфера относительно крыла.
Ниже описан предпочтительный вариант способа определения величин и места установки компонентов преобразователя и значения сопротивления и индуктивности электрической схемы 112 (фиг. 19). Определяют распределение энергии деформации в лопатке для подлежащей демпфированию формы вибрации. Это определение, обычно называемое анализ с помощью метода конечных элементов, обычно требует наличия компьютерной программы анализа вибрации, например, NASTRAN.
Идентифицируют участки лопатки, имеющие самый высокий уровень плотности энергии деформации, и компоненты преобразователя помещают в эти области с тем, чтобы сделать максимальным передачу энергии деформации. В некоторых вариантах может быть необходимым несколько другие расположения в связи с другими факторами, а не вибрацией, например аэродинамика, вес. Преобразующие компоненты должны иметь толщину, удовлетворяющую весовые требования варианта выполнения. При расположенных таким образом элементах преобразователя определяют распределение энергии деформации в лопатке для подлежащей демпфированию формы вибрации. Эти операции повторяют с определением для каждого преобразующего компонента общего веса, длины, ширины и толщины. Для каждого шага итерации собирают данные по общей энергии деформации в лопатке. Собранные данные используют для выполнения расчетов, описанных ниже для выполнения оценки, для каждого вышеописанного шага итерации, оптимальных значений для индуктора и сопротивления и эффекта установки компонентов преобразователя на лопатке. Несмотря на то, что в определениях и уравнениях ниже присутствует термин "цирконат и титанат свинца", эти уравнения и определения не ограничивают преобразующие компоненты применением лишь материалов типа цирконат и титанат свинца. Определения:
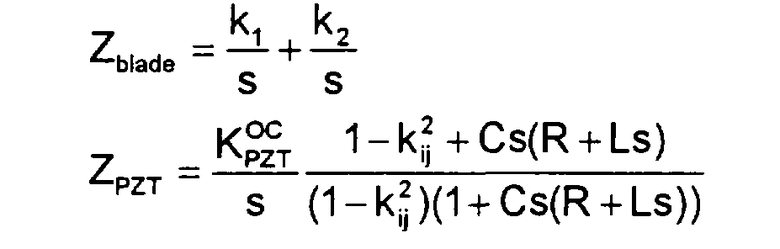
где Zblade - механический импеданс лопатки;
k1 - жесткость лопатки параллельно элементу из цирконата и титаната свинца;
k2 - жесткость лопатки, на которую элемент из цирконата и титаната свинца в общем и целом не оказывает влияния;
ZPZT - механический импеданс элемента из цирконата и титаната свинца для шунтированного элемента (R соединен последовательно с L);
 - жесткость элемента из цирконата и титаката свинца в открытой
- жесткость элемента из цирконата и титаката свинца в открытой
схеме;
kij - коэффициент электромеханической связи элемента из цирконата и титаната свинца;
С - емкость элемента из цирконата и титаната свинца в сжатом состоянии;
L - величина индуктивности схемы;
R - величина демпфирующего сопротивления;
S - параметр Лапласа, jω.
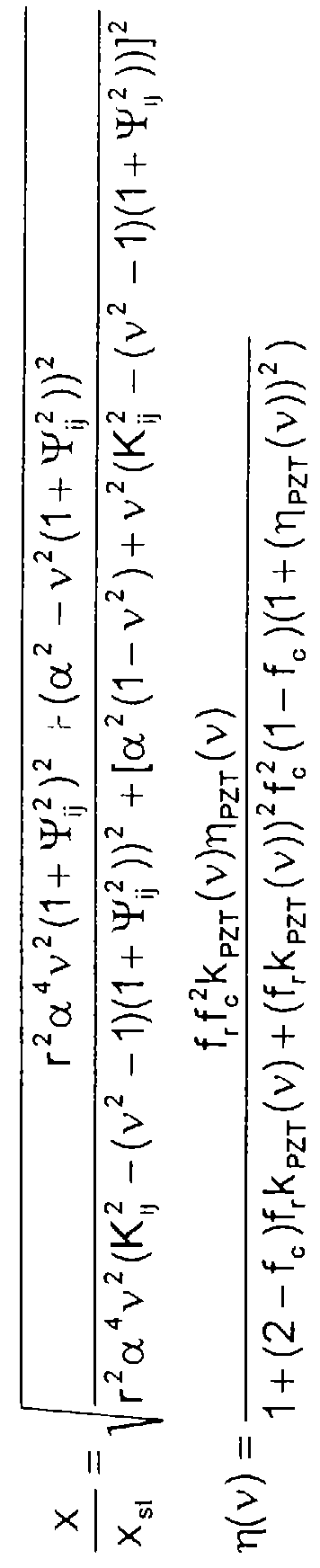
где X/Xst - функция динамического усиления, и
η - функция демпфирования лопатки.
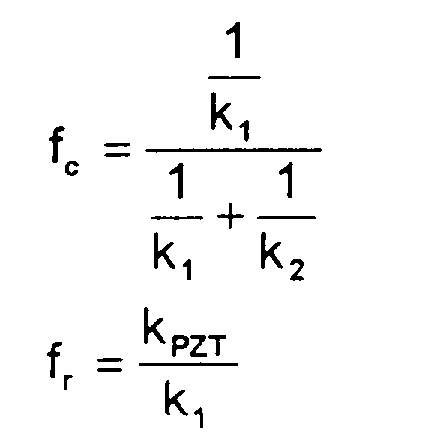
где fc - часть податливости лопатки параллельно элементу из цирконата и титаната свинца, полученная из результатов анализа с помощью метода конечных элементов, выполненного выше, для каждой из итераций метода конечных элементов, выполненной выше;
fr - коэффициент отношения жесткости элемента из цирконата и титаната свинца к жесткости лопатки, на которую оказывает влияние элемент из цирконата и титаната свинца, указанный коэффициент получен из результатов анализа с помощью метода конечных элементов, выполненного выше, для каждой из итераций метода конечных элементов, выполненной выше.
Каждая итерация анализа посредством метода конечных элементов, выполненного выше, дает в результате одно сочетание значений fc и fr. Для каждого сочетания значений fc и fr вычисляют значения  и
и  , где
, где

 - это мера того, какая часть всей энергии воздействия системы была преобразована в электрическую энергию.
- это мера того, какая часть всей энергии воздействия системы была преобразована в электрическую энергию.
 - это мера того, какая часть воздействия лопатки потеряна вследствие того, что элемент из цирконата и титаната свинца оказывает влияние только на часть лопатки. Следует отметить, что обычно желательно, чтобы значение
- это мера того, какая часть воздействия лопатки потеряна вследствие того, что элемент из цирконата и титаната свинца оказывает влияние только на часть лопатки. Следует отметить, что обычно желательно, чтобы значение  было максимальным, тогда как значение
было максимальным, тогда как значение  и общий вес лопатки должны быть минимальными.
и общий вес лопатки должны быть минимальными.
Для каждого сочетания значений  и
и  вычисляют оптимальные значения R и L , используя уравнения ниже:
вычисляют оптимальные значения R и L , используя уравнения ниже:
Оптимальные значения для r и α равны:

где ν- отношение частоты вынужденных вибрационных колебаний, ωs, к собственной модальной частоте ωn лопатки с элементом из цирконата и титаната свинца в открытой цепи;
r - параметр настройки демпфирования, RCωn (R - сопротивление, С - емкость элемента из цирконата и титаната свинца в сжатом состоянии и ωn - собственная модальная частота;
α - отношение частоты электрической резонансной частоты,
 , к собственной модальной частоте ωn.
, к собственной модальной частоте ωn.
Затем, используя уравнение для нахождения X/Xst, т.е. функции динамического усиления, вычисляют величину уменьшения вибрационных воздействий, обеспечиваемую сочетанием значений  и
и  и связанными с ними оптимальными значениями R и L. Функция динамического усиления представляет итоговое воздействие на лопатку как функцию частоты для данного возбужденного состояния.
и связанными с ними оптимальными значениями R и L. Функция динамического усиления представляет итоговое воздействие на лопатку как функцию частоты для данного возбужденного состояния.
Предпочтительный вышеописанный способ был использован для получения оптимальных расчетных значений параметров для варианта выполнения, содержащего экспериментальную лопатку вентилятора и демпфер на основе компонентов из цирконата и титаната свинца, прикрепленный к лопатке. Затем были проведены испытания для эмпирического определения оптимальных значений, и прогнозируемые значения и эмпирически определенные значения приведены ниже.
Данные, полученные в результате анализа с помощью метода конечных элементов с использованием программы NASTRAN:
fc=0,536
fr=0,633
Соответствующее значение постоянной связи kij для материала - цирконата и титаната свинца 5А, используемого в этом варианте выполнения:
К31 = -0,34
Прогнозируемые оптимальные значения, полученные с использованием вышеописанного предпочтительного способа:
L=3,84 Гн
R=825 Ом
η(ν=1)=0,070
Эмпирически определенные оптимальные значения
R=708 Ом
L=3,78 - 3,85 Гн
Демпфирование лопатки (фактор потерь): 0,08 - 0,09
Близость прогнозируемых и эмпирически определенных значений показывает, что демпфирование может быть очень хорошо спрогнозировано с помощью аналитического и компьютерного моделирования, и что оптимизация демпфирования может быть получена посредством сведения к минимуму веса компонентов из цирконата и титаната свинца, размеров и толщины при выполнении процедур правильного расположения указанных компонентов.
Причина, по которой демпфирование на практике оказалось немного выше, чем прогнозируемое, состоит в том, что компоненты из цирконата и титаната свинца растянуты как в продольном направлении, так и в меньшей степени, в поперечном. Таким образом, имеются компоненты как d31, так и d32, которые могут эффективно увеличить значение постоянной связи к31. Это может привести к увеличению демпфирующего эффекта.
Несмотря на то, что описанные варианты выполнения относятся к пассивному демпфированию, демпфер, выполненный согласно настоящему изобретению, может быть также использован в схемах активного регулирования, в которых, например, датчик вибрации обнаруживает вибрацию и управляющая схема подает напряжение к компонентам преобразователя для создания воздействия, противодействующего выявленной вибрации. Схема активного регулирования в общем случае требует наличия датчика, процессора обработки сигналов, исполнительного механизма и источника питания. Однако для активного варианта выполнения может не требоваться такого большого количества материала компонентов преобразователя, которое требуется в пассивном варианте выполнения.
Наконец, для специалистов очевидно, что преобразователь энергии в обязательном порядке должен содержать только преобразующие компоненты.
Преобразующие компоненты могут содержать любой подходящий материал. Тип материала включает, но без ограничения, класс материалов, в общем случае обозначаемых как пьезоэлектрики, пьезомагнетики, сегнетоэлектрики и магнитострикционные материалы. Особенно следует отметить класс пьезоэлектриков и пьезоэлектрической керамики, включая цирконат и титанат свинца, и композиты на его основе, кварц, органические соединения, tormeline, поливинилиденфторид.
Несмотря на то, что настоящее изобретение описано в связи с вариантами выполнения для использования с лопаткой вентилятора, настоящее изобретение может быть в общем случае применимо к любому компоненту турбомашины, испытывающему вибрационные воздействия, и оно обеспечивает конкретные преимущества для использования с компонентами, которые должны выдерживать высокие стационарные деформации. Компоненты, испытывающие высокие стационарные деформации, содержат, но без ограничения, не только вращающиеся аэродинамические профили, но также направляющие лопасти, которые испытывают высокие воздействия вследствие скорости потока газа, и компоненты кабины (гондолы) и другие компоненты, содержащие поверхности управления воздухом в двигателе.
Несмотря на то, что настоящее изобретение описано в виде конкретных вариантов выполнения, это описание не рассматривается как ограничивающее рамки изобретения. Следует понимать, что для специалистов в данной области при рассмотрении настоящего описания очевидна возможность существования различных модификаций вышеописанных вариантов выполнения, а также дополнительных вариантов выполнения, без отступления от духа изобретения, как изложено в прилагаемой формуле изобретения. Таким образом предполагается, что прилагаемая формула изобретения будет охватывать любые такие модификации или варианты выполнения, как лежащие в действительных рамках изобретения.
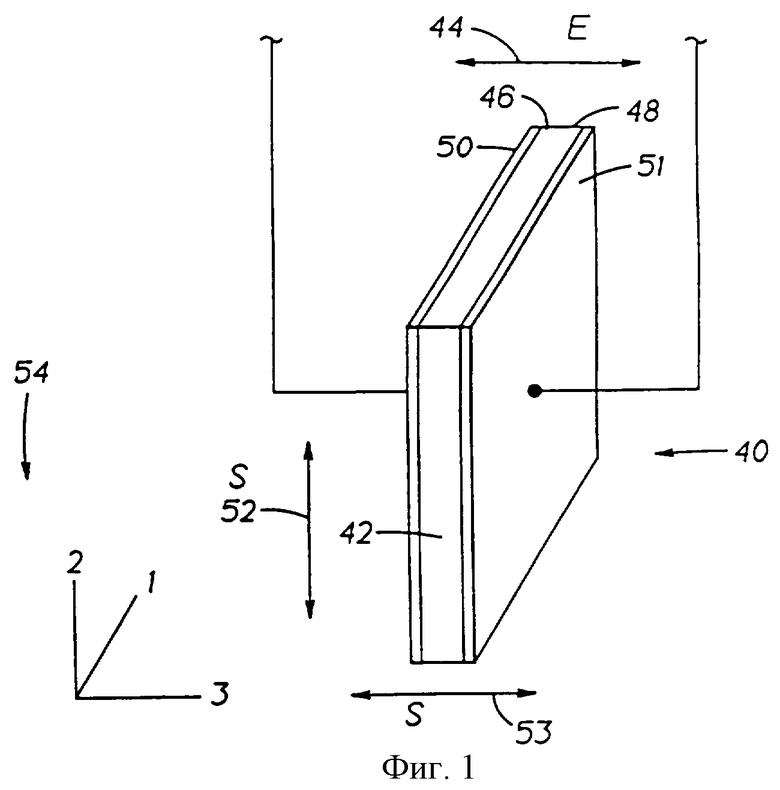

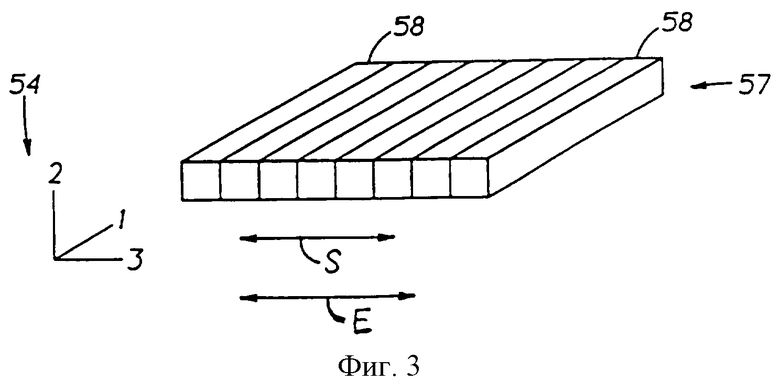




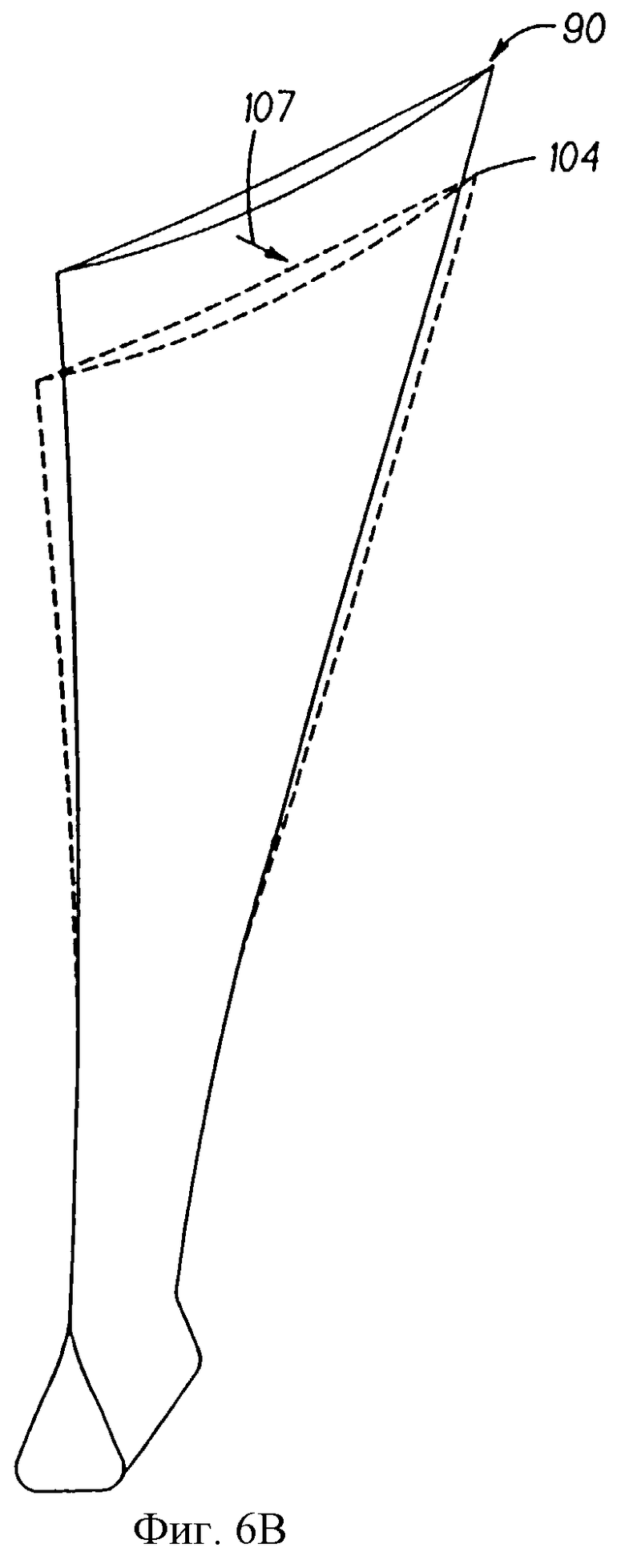
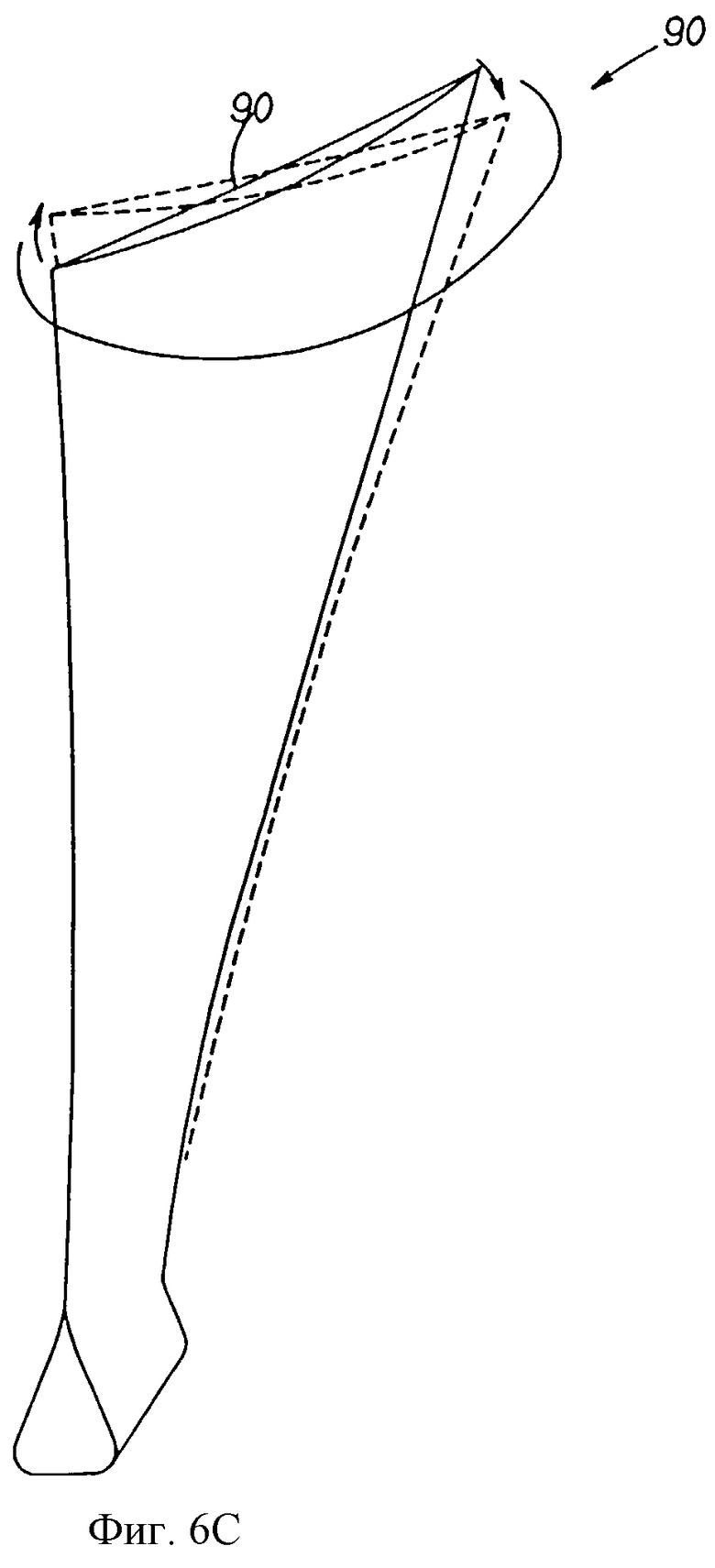
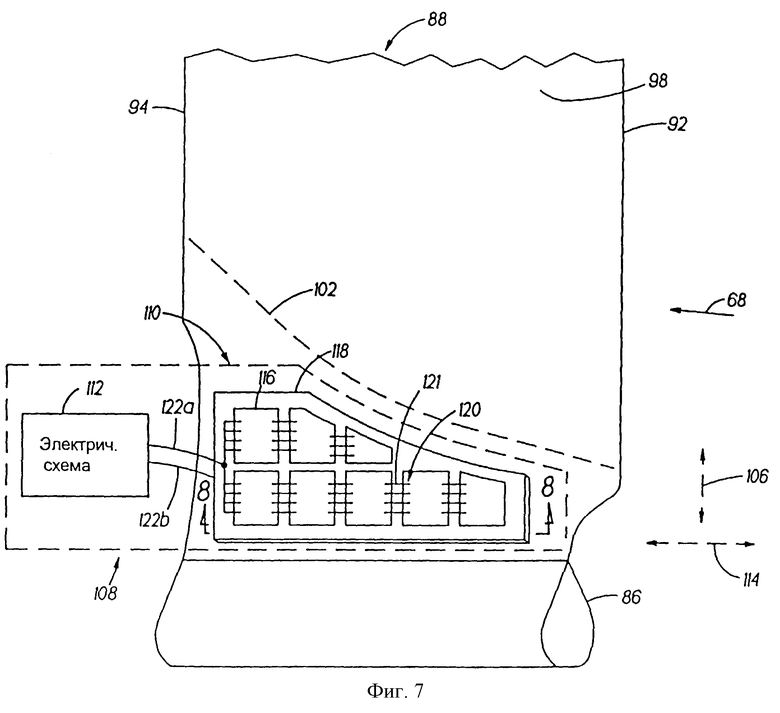


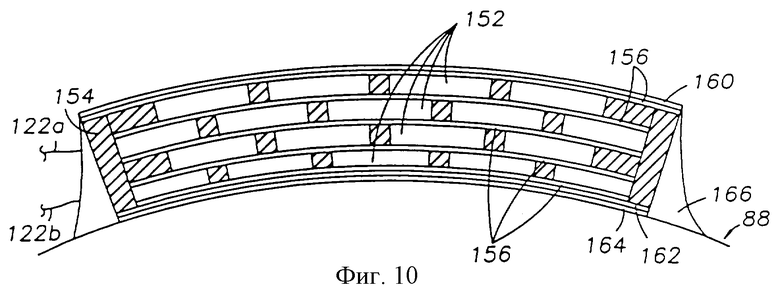
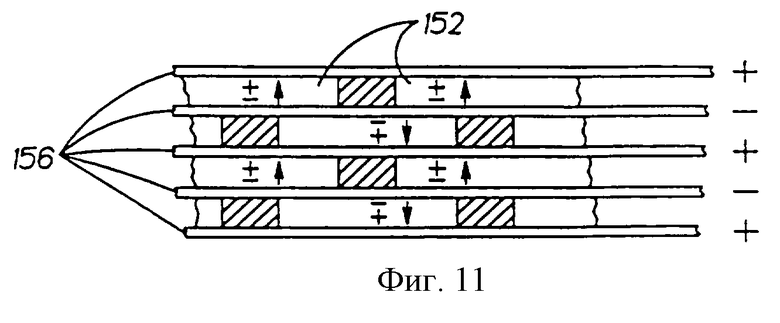
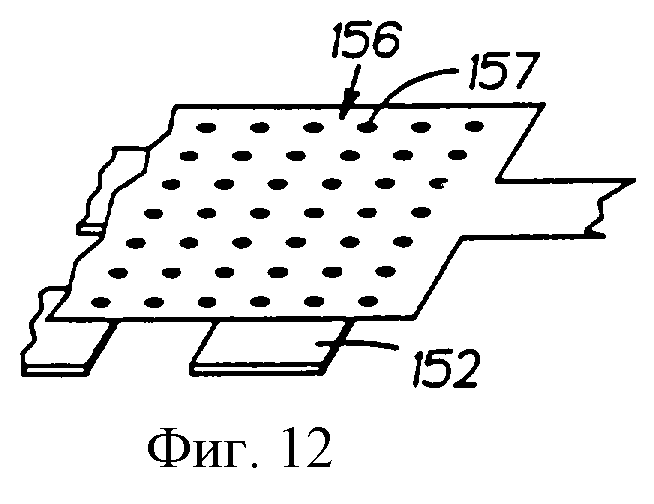
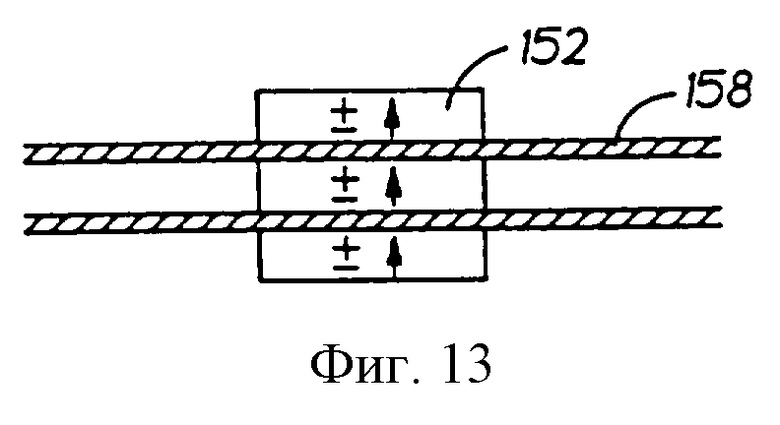



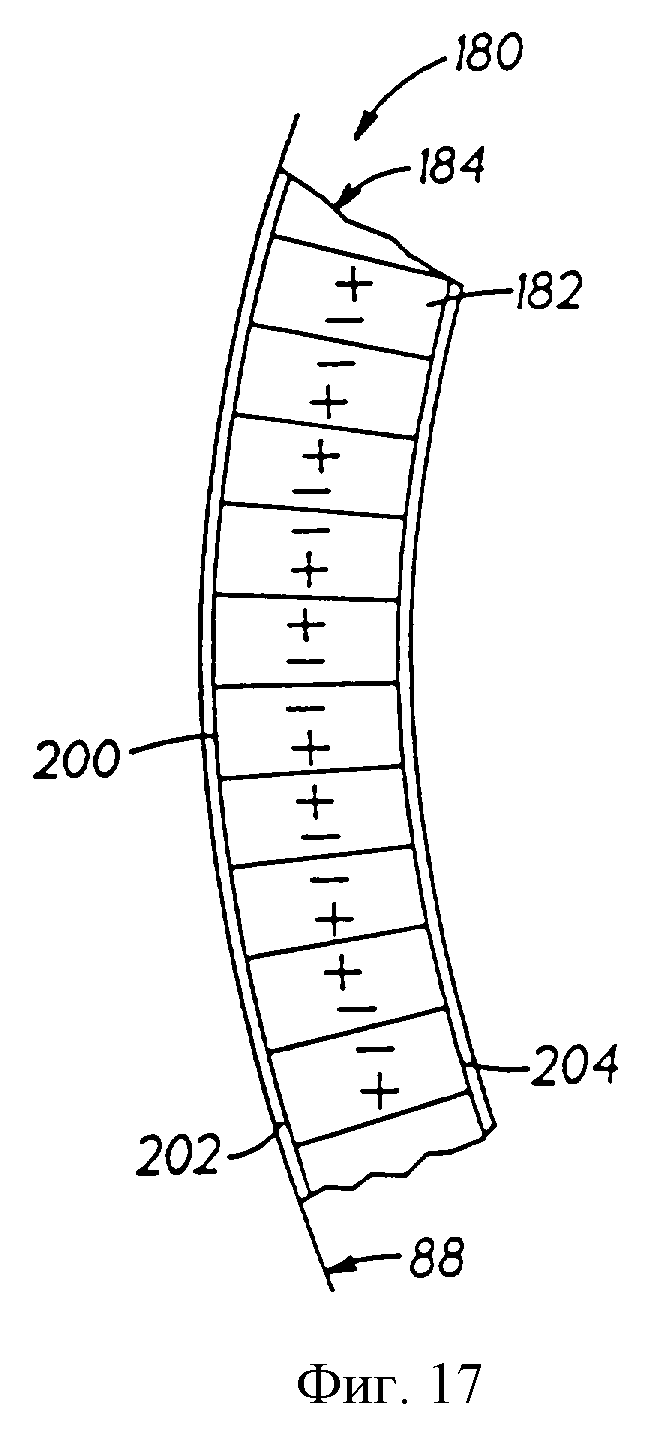
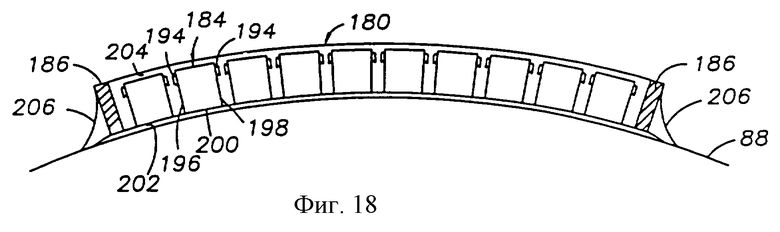
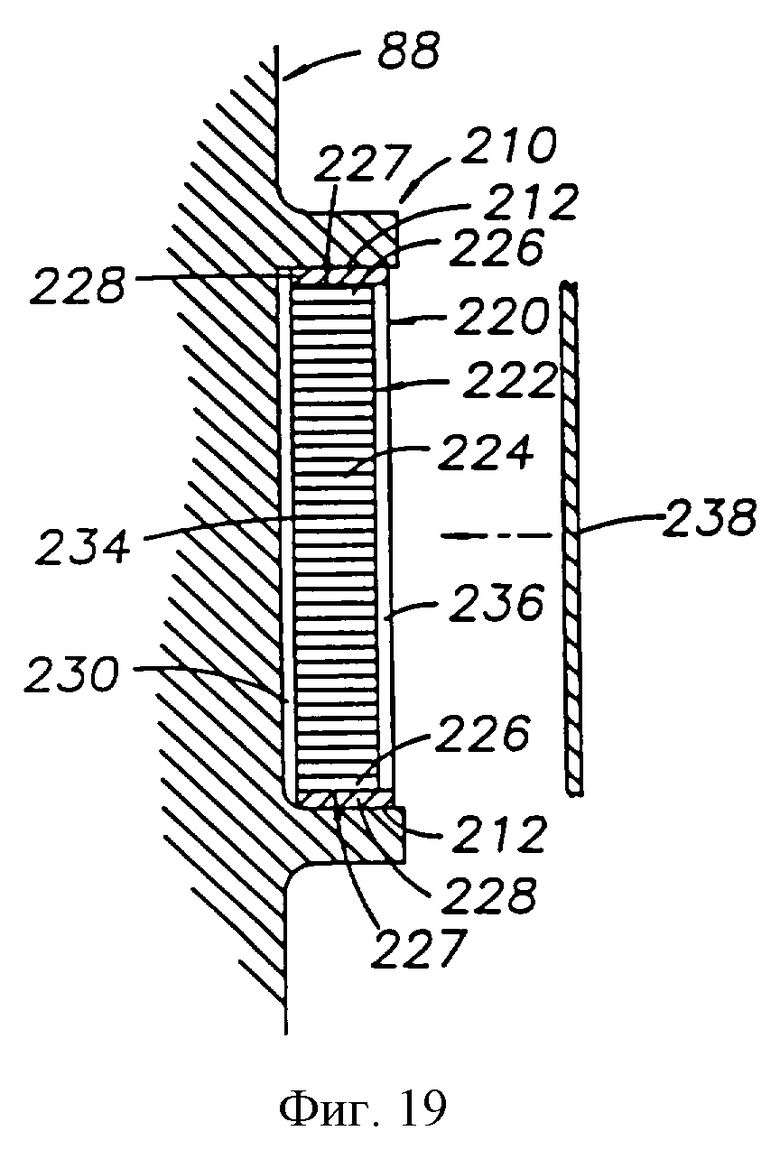

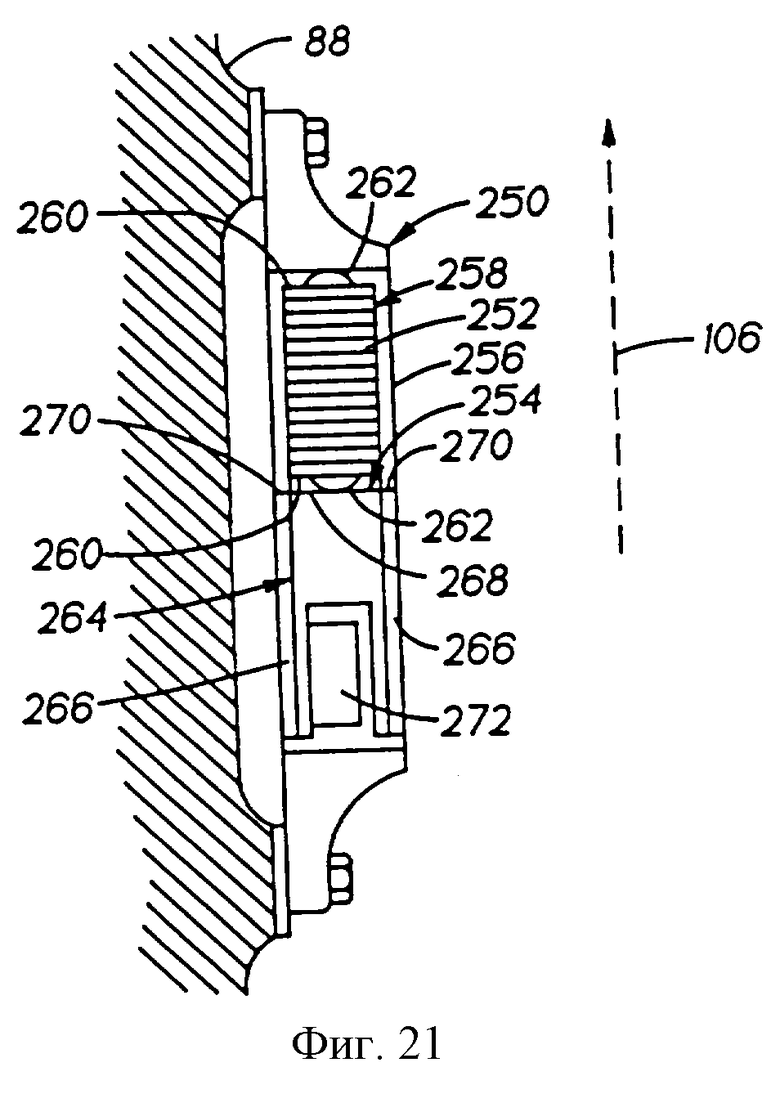
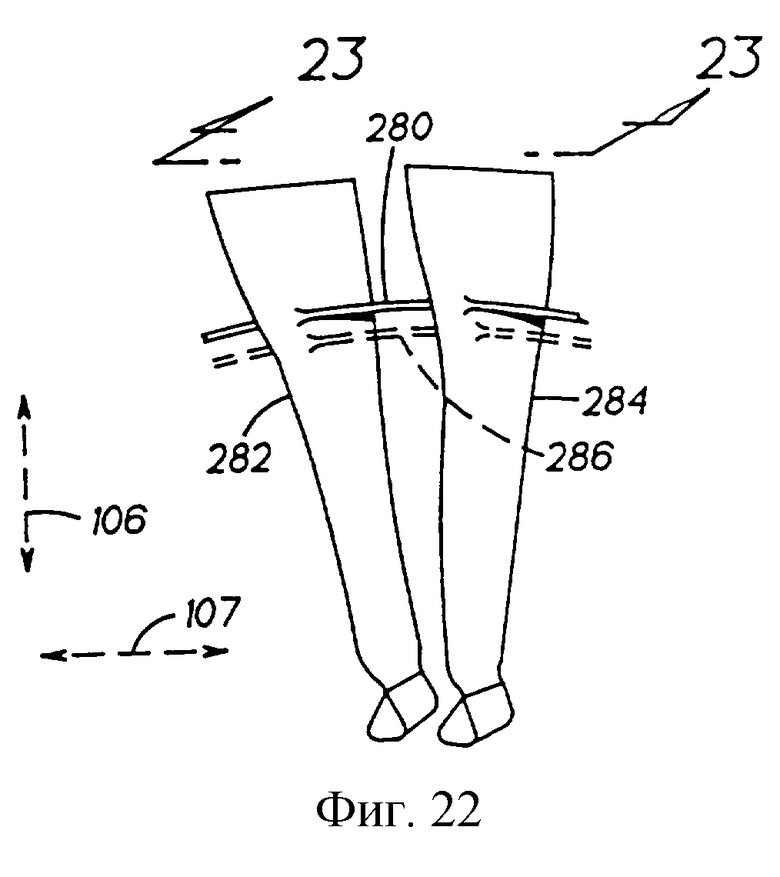
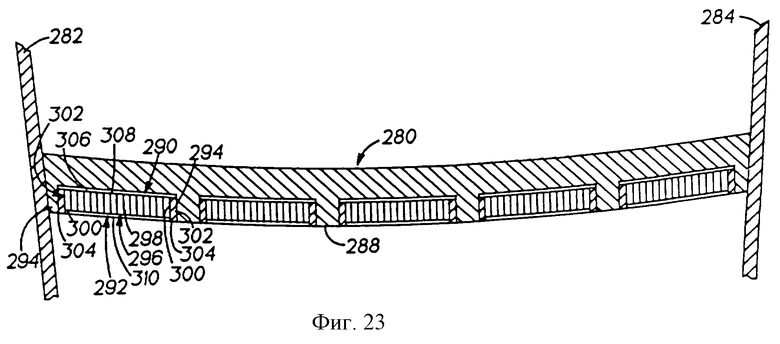
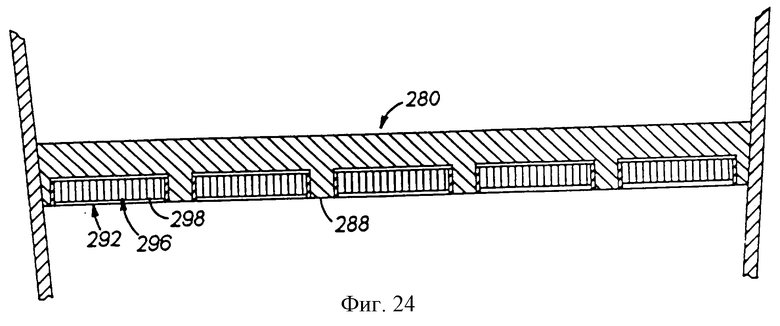
Изобретение относится к способу демпфирования вибраций в компонентах турбомашин и устройству для осуществления этого способа. Предложены способ и устройство для уменьшения величины вибрационных деформаций в компоненте турбомашины, испытывающем высокие стационарные деформации, посредством, в случае пассивного варианта выполнения, связывания преобразователя механической энергии в электромагнитную с внутренней и/или наружной поверхностью компонента и/или внедрения преобразователя энергии в компонент и посредством, в случае активного варианта выполнения, связывания преобразователя механической энергии в электромагнитную с внутренней и/или наружной поверхностью компонента. Изобретение позволяет обеспечить преобразование механической энергии в электромагнитную в компонентах турбомашины без использования активной системы управления. 4 с. и 42 з.п. ф-лы, 27 ил.
| US 4967550 A, 06.11.1990 | |||
| US 4626730 A, 02.12.1986 | |||
| US 5315203 A, 24.05.1994 | |||
| US 5348124 A, 20.09.1994 | |||
| СПОСОБ ДИАГНОСТИКИ АВТОКОЛЕБАНИЙ РАБОЧЕГО КОЛЕСА ОСЕВОЙ ТУРБОМАШИНЫ | 1994 |
|
RU2076307C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ АВТОКОЛЕБАНИЙ РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ | 1995 |
|
RU2094618C1 |

