Область технического применения
Изобретение относится к способу электропитания в пусковом и установившемся режимах синхронного двигателя с постоянными магнитами, в частности, предназначенного для приведения в движение гидравлического насоса центробежного типа.
Предпосылки для создания изобретения
Синхронные двигатели с постоянными магнитами весьма предпочтительны, поскольку они высокоэффективны в работе.
Однако проблемой, которая, в частности, возникает в отношении двигателей высокой мощности, приводящих в движение нагрузки, имеющие значительную инерцию, является пусковая стадия.
Согласно известному уровню техники для решения этой проблемы используют механические средства или процессы электронного управления.
Механические средства, в частности, предполагают отсоединение рабочих колес насосов, приводимых в движение, так что ротор может свободно начать движение на протяжении угла, составляющего менее 360o, а затем войти в зацепление с рабочим колесом и продолжить свое движение.
Очевидно, что это решение может быть использовано, когда ротор обладает невысокой механической инерцией, которая в любом случае позволяет ему достичь установившегося режима за полупериод, если, что обычно имеет место, ротор имеет два полюса.
На практике это означает, что невозможно использовать эти механические устройства, чтобы иметь насос средней и высокой мощности, включающий в себя ротор, размеры, а следовательно и инерция которого, являются функцией упомянутой мощности.
Также известны процессы электронного пуска, при которых управление ротором осуществляют по его положению и синусоидальный ток сети "усекают" статическими переключателями, так что он находится в фазе, которая не противоположна перемещению ротора.
Такое решение, при котором используют ток без модификации частоты сети, не позволяет достичь высоких статических крутящих моментов, а следовательно не позволяет обеспечить электропитание двигателей средней и высокой мощности.
При других способах используют инвертор, генерирующий форму волны, частота которой постепенно повышается, причем режим этой частоты заблаговременно запоминается в цепи электропитания.
Это решение также приводит к значительным проблемам, поскольку все электромоторы с постоянными магнитами отличаются друг от друга, в частности, в отношении магнитных характеристик ротора, несмотря на изготовление с идентичными размерами.
Двигатели этого типа также отличаются в отношении пакета статора.
В отношении статора проблему можно считать умеренной, поскольку различия могут иметь место только из-за пластинчатого пакета и обмоток катушки.
Однако эти различия не имеют особого значения и не важны в смысле влияния на магнитную цепь.
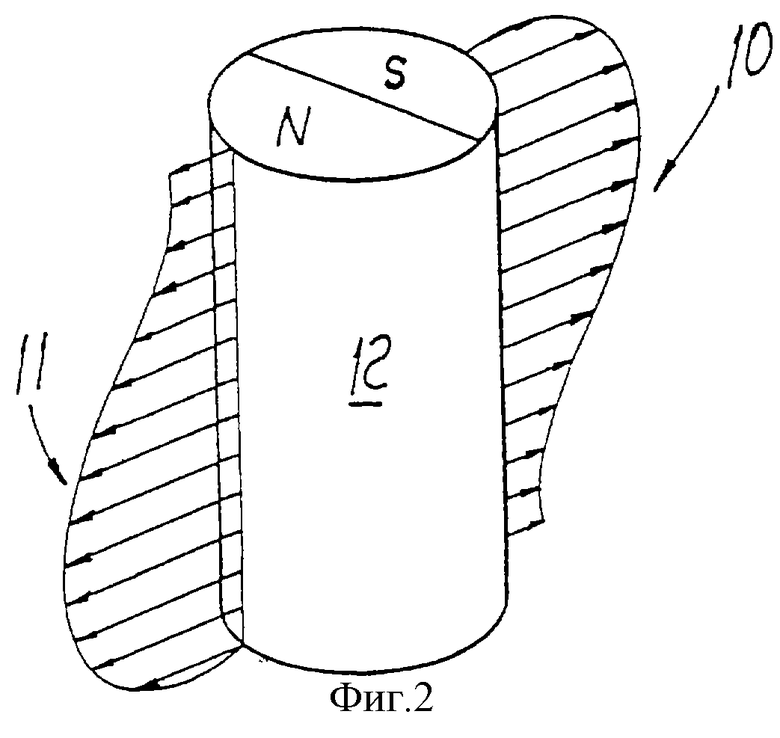
Наибольшие различия встречаются в роторах, поскольку они не идентичны и, в частности, никогда не имеют одинаковое и постоянное направление северного и южного полей.
Всегда имеется север и юг, но в отношении геометрии ротора, формы полей обычно представляют собой формы, обозначенные на фиг.2 позициями 10 и 11 применительно к цилиндрическому ротору с постоянными магнитами, обозначенному позицией 12.
Это прежде всего влечет за собой асимметрию движения ротора, так что двигатель работает неравномерно.
Типичный двигатель, имеющий ротор с постоянными магнитами, на фиг.1 в общем обозначен позицией 13, при этом ротор обозначен позицией 14 и наводится между двумя полюсами, изготовленными из пластин 15 и 16, представляющими собой концы статорного пакета 17, на которых установлены две катушки 18 и 19, возбуждающие поле статора.
Чтобы обеспечить преимущество для одного направления вращения ротора, полюсы имеют углубления 20 и 21, которые определяют ось симметрии 22 ротора 14 под углом по отношению к срединной оси полюсов 15 и 16.
Также имеется датчик 23 положения, который установлен в промежуточной зоне между полюсами 15 и 16.
Эта обычная конструкция создает дополнительную проблему вследствие смещения нейтральной оси ротора по отношению к положению датчика 23.
Все эти проблемы препятствуют получению точных сведений о магнитной структуре двигателя и о его действительных характеристиках.
Другая проблема возникает вследствие того, что предлагаемый способ пуска связан с сочетанием синхронного двигателя с постоянными магнитами и центробежного гидравлического насоса.
Механические-гидравлические характеристики насоса также составляют проблему пуска, поскольку они тоже неизвестны и не могут быть точно предсказаны.
В пуск гидравлического насоса по существу вовлечены многие факторы.
Например, если насос длительное время находится в неподвижном состоянии, могут возникнуть проблемы в отношении осаждения продуктов, транспортируемых водой, которые создают неизвестные начальные нагрузки.
Эта проблема также может иметь место в течение вращения, когда транспортируемые объекты располагаются в камере рабочего колеса, а иногда в месте заклинивания и стопорения вращения насоса.
Сущность изобретения
Цель настоящего изобретения заключается в создании способа электропитания при пусковом и установившемся режимах синхронного двигателя с постоянными магнитами, в частности предназначенного для приведения в движение центробежного гидравлического насоса, который позволяет устранить все упомянутые проблемы и, в частности, пригоден для решения проблем каждого отдельного двигателя.
Следующая основная цель заключается в создании способа, который обеспечивает пуск синхронных электродвигателей с постоянными магнитами даже средней мощности и от средней до высокой мощности и в заданном направлении.
Следующая основная цель заключается в создании способа пускового и последующего электропитания синхронных двигателей с постоянными магнитами, который сводит к минимуму поглощение энергии в течение пуска и в установившемся режиме.
Другая важная цель заключается в создании способа электропитания в установившемся режиме синхронного двигателя с постоянными магнитами, при котором соsФ практически равен 1.
Эти и другие цели, которые будут очевидны из нижеуказанного, достигаются способом электропитания в пусковом и установившемся режимах синхронного двигателя с постоянными магнитами, в частности предназначенного для приведения в движение центробежного гидравлического насоса, отличающимся тем, что он содержит следующие стадии:
1) стадию изучения, в течение которой ротор совершает два последовательных оборота, охватывающих 180o, с подачей к статору постоянного пускового тока для первых 180o, его преобразованием для вторых 180o после того, как ротор достиг первые 180o, и запоминанием посредством памяти, которая находится в цепи электропитания, в сочетании с линейным магнитным датчиком положения рабочих характеристик в определенном количестве отдельных точек, которые соответствуют заданным угловым положениям ротора, и определением в течение этой стадии пускового тока и реального нулевого положения ротора;
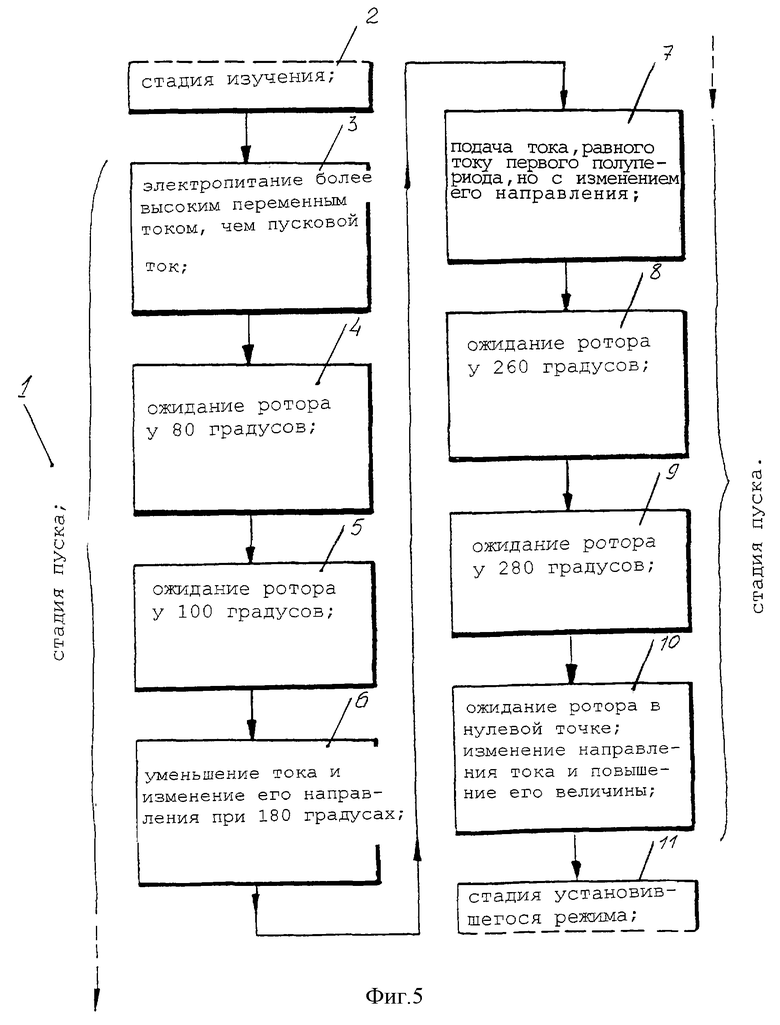
2) пусковую стадию, в течение которой более сильный ток, чем пусковой ток, определенный в течение первой стадии, подают с первоначально низкой частотой, которая затем постепенно увеличивается, при этом обеспечиваются ожидание и проверка посредством линейного датчика прохождения ротора 80 и 100o и далее 260 и 280o;
3) стадию установившегося режима, в течение которой как только достигается частота установившегося режима, а следовательно и скорость установившегося режима, подаваемый ток практически представляет собой синусоидальный ток и ротор ожидается у перехода через нулевые точки перед инвертированием направления тока;
обеспечиваются функции управления, которые, если ротор замедляется в течение стадии установившегося режима, возвращают процесс к пусковой стадии, и которые в случае стопорения ротора, изменения направления вращения на обратное, отказа линейного датчика или непоследовательностей, возвращают процесс к стадии изучения.
Краткое описание фигур
Другие характеристики и преимущества настоящего изобретения будут более очевидны из приведенного ниже подробного описания предпочтительного варианта осуществления способа, представленного на прилагаемых фигурах, на которых:
на фиг. 1, которая уже описана, представлено примерное схематическое изображение конструкции синхронного двигателя с постоянными магнитами, к которому применен способ;
на фиг. 2, которая уже описана, представлено неправильное расположение магнитного поля ротора с постоянными магнитами;
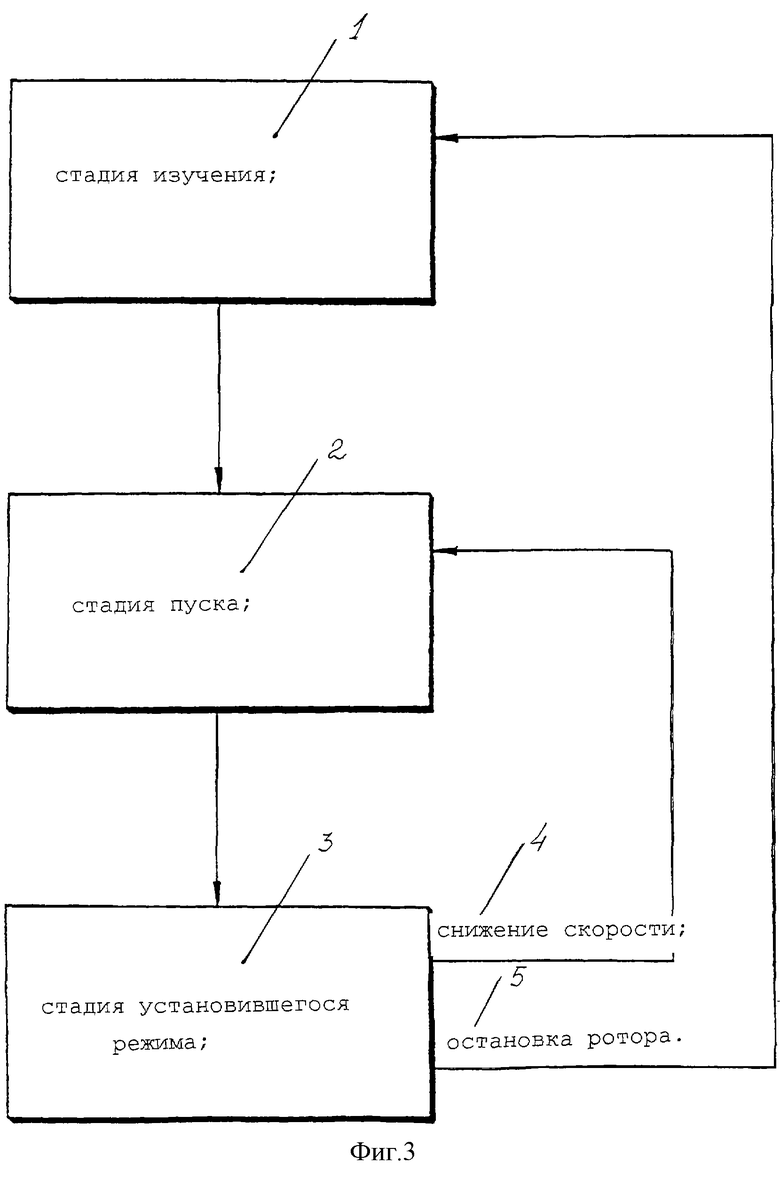
на фиг. 3 представлена схема прохождения трех стадий способа и их взаимосвязь;
на фиг.4 представлена схема прохождения стадии изучения;
на фиг.5 представлена схема прохождения пусковой стадии;
на фиг.6 представлена схема прохождения стадии установившегося режима;
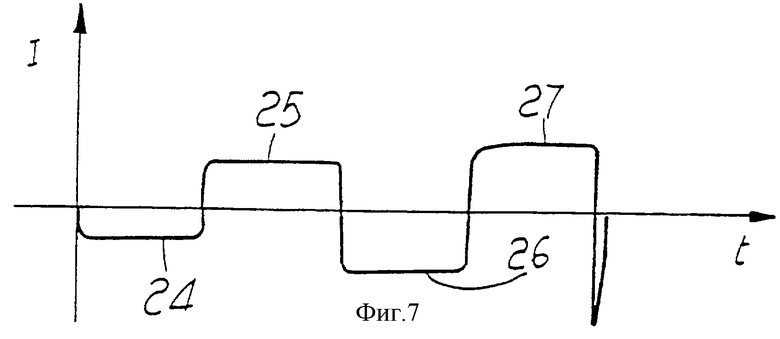
на фиг. 7 представлена кривая тока в течение стадии изучения, пока не произойдет первое перемещение ротора;
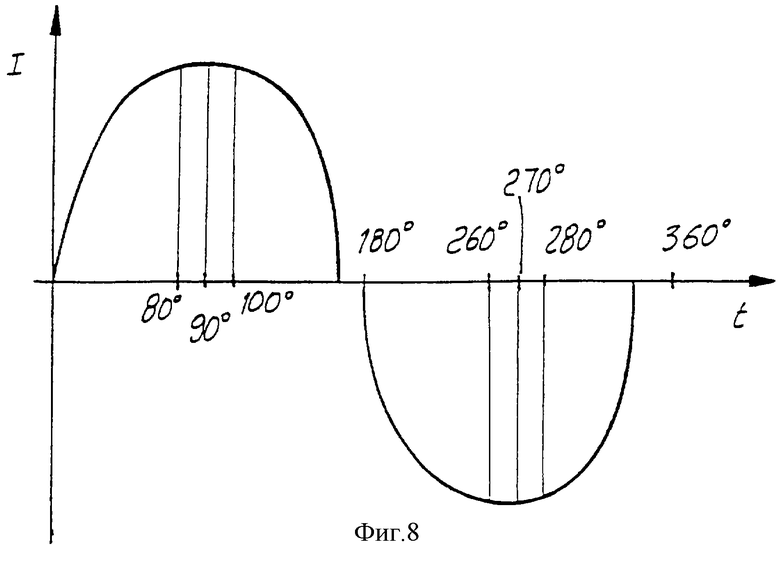
на фиг.8 представлена кривая тока при первых двух поворотах на 180o;
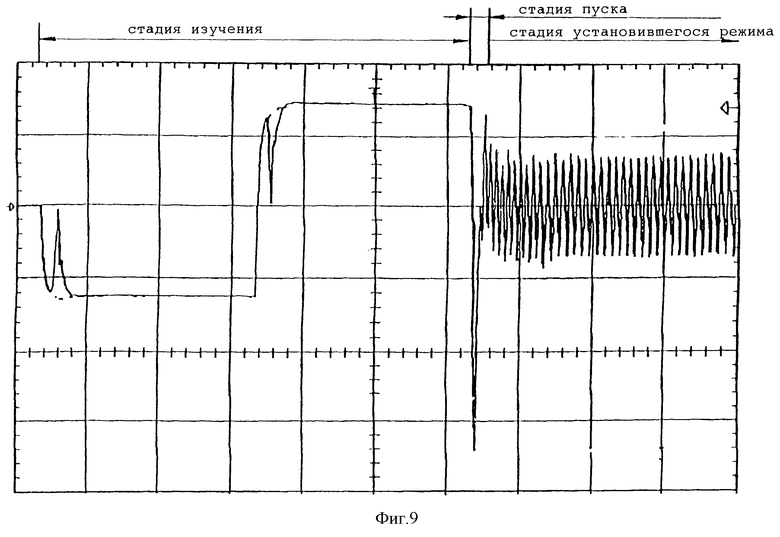
на фиг.9 представлена кривая тока от стадии изучения до пусковой стадии и далее до стадии установившегося режима.
Варианты осуществления изобретения
Способ согласно изобретению состоит из трех стадий, что схематически представлено на фиг.3:
1) стадии изучения;
2) пусковой стадии;
3) стадии установившегося режима.
Схема согласно фиг.3 иллюстрирует прохождение обратной связи, более подробно описанной ниже, при этом на ней показано, что если ротор замедляется в течение стадии установившегося режима, процесс возвращается к пусковой стадии, при этом, если ротор останавливается или в течение стадии установившегося режима происходят другие аномалии, процесс возвращается к стадии изучения.
В течение стадии изучения (фиг. 4) ротор поворачивается на 180o посредством подачи к полю статора постоянного тока малой величины.
Эта стадия более четко представлена на фиг.1, где показано, что производится подача постоянного тока, при этом он изменяется с постепенным повышением сил, которые в интервалах 24 и 25 не обеспечивают движение ротора, в то время как интервал 26 характеризует ток, при котором ротор поворачивается так, чтобы после вращения на 180o достичь положения, которое соответствует положению, определяемому магнитным полем полюсов 15 и 16, при этом дальнейшее вращение на 180o происходит в последующем интервале, поскольку поле меняется на обратное.
Причина изменения тока за периоды, которые могут составлять порядка 200 мс, состоит в том, что даже если ротор находился в положении согласования с магнитным полем, в последующем интервале он подвергается вращению на 180o.
Таким образом прежде всего процесс определяет, какой минимальный ток перемещает ротор в течение первых 180o и какой ток перемещает его в течение вторых 180o.
Эти две величины как правило фактически неодинаковы из-за неоднообразия и асимметрии ротора и статора.
Эти две величины тока считаются пусковыми величинами: наивысшая из этих двух величин запоминается в памяти, находящейся в процессоре, который входит в состав устройства, обеспечивающего электропитание, причем такая наивысшая величина при всех предназначениях считается величиной пускового тока двигателя.
При подаче тока такой величины можно быть уверенным, что при указанных условиях двигатель, подсоединенный к гидравлическому насосу, в любом случае будет приведен в движение.
В течение стадий вращения линейный магнитный датчик 23 положения обеспечивает запоминание, причем вновь в процессоре, ряда величин, которые соответствуют угловому положению ротора и относятся к первым 180o вращения и к последующим 180o вращения, которые в целом формируют полный поворот.
Поскольку линейный датчик 23 расположен в промежуточной зоне между полюсами статора, величина магнитного поля, которую он выявляет, не равна нулю, как должно быть теоретически, когда ротор не движется, поскольку, как упомянуто, для пуска ротора в заданном направлении полюсы 15 и 16 статора асимметричны и им придана такая форма, что ротор сам по себе расположен с углом осевого смещения, приблизительно равным 5o, а это обеспечивает при пуске уже заданное отсутствие равновесия, которое помимо возможности более легкого пуска ротора также определяет направление его вращения.
Вследствие запоминания линейным датчиком двух значений поля, которые имеют место при 180 и 360o, можно определить точное положение ротора, причем эти данные хранятся в процессоре.
Следовательно, в течение стадии изучения определяется не только пусковой ток, но и реальная нулевая точка ротора, а также параметры при 90 и 270o, причем это выполняется путем экстраполяции величин, выявленных в течение движения.
Стадия самоизучения происходит за весьма короткое время, которое может составлять приблизительно 400 мс.
Эта стадия самоизучения выполняется каждый раз при повторном пуске двигателя, так что обеспечивается компенсация, взаимосвязанная с какими-либо изменениями или новыми ситуациями, касающимися двигателя.
Новые ситуации, например, нагрузка на рабочее колесо, которая отличается от обычной, могут приводить к подаче при каждом пуске разного пускового тока; вот почему стадия изучения выполняется каждый раз.
Кроме того следует заметить, что каждый раз электропитание двигателя осуществляется минимальным током, который согласуется с его движением, что позволяет понизить затраты и избежать ненужных напряжений на статоре.
Как упомянуто, изученные данные содержат значения, имеющие место при 90o; путем вычитания из них примерно 20-25% получают величину, касающуюся охвата ротором при его вращении первых 80o, причем эта величина повторяется приблизительно при 100o вращения.
Когда ротор совершает поворот на первые 100o, он больше не может двигаться в обратном направлении и поэтому поворачивается до тех пор, пока не достигнет 180o (фиг.8).
Оба этих данных - для поворота на 80 и 100o, также выявляются микропроцессором, который позже использует их для проверки функций.
Как только эти данные накоплены, стадия изучения завершается и процесс перемещается к пусковой стадии (фиг.5).
Пусковая стадия начинается тогда, когда ротор приходит в нулевую точку второго полуповорота, с подачи тока, который равен пусковому току, определенному в течение стадии изучения, с увеличением приблизительно на 25%, причем он подается синусоидально с модернизацией посредством цепи электропитания, управляемой микропроцессором.
Этот ток подают и сохраняют до тех пор, пока ротор не достигнет первых 180o, где процесс обеспечивает его ожидание, если он задерживается по отношению к заданному теоретическому времени.
Ожидание сверх теоретического времени обычно может составлять приблизительно 1,5 с.
Если ротор в течение этого времени не достиг 80o, это означает, что по некоторой причине он или блокирован, или самоизучение не было проведено надлежащим образом, и поэтому пусковая стадия автоматически прерывается и возобновляется стадия самоизучения.
Если вместо этого ротор достигает 80o, ток сохраняется до достижения ротором 100o и затем следует убывание синусоидальной формы.
Эта операция выполняется на первом завершающем периоде, при этом, когда имеет место время ожидания, можно быть уверенным в возможности пуска даже высокоинерционных роторов, поскольку процесс всегда обеспечивает ожидание ротора на его переходе в заданных угловых положениях.
После первого законченного цикла, когда выяснено, что ротор не заклинен, процесс обеспечивает ожидание ротора исключительно на его переходе через нулевую точку и ожидание на промежуточных углах более не выполняется.
Затем увеличивается частота, вновь проверяется точка перехода ротора через ноль и при этом путем увеличения или уменьшения заданной частоты при обороте за оборотом в соответствии с большим или меньшим ожиданием ротора на точке перехода через ноль ротор постепенно приводят к заданной скорости установившегося режима.
На практике работа происходит так, как если бы фактически имелся стартер, который постепенно доводил бы ротор до скорости установившегося режима.
Удобно ожидать ротор на нулевой точке также и потому, что, как установлено, неравномерные или асимметричные роторы, ожидаемые в точках, отличающихся от нулевых точек, могут привести к усложнениям и ложному считыванию, а также к насыщению статорного пакета.
Если в двух полупериодах были заданы разные величины, то были бы созданы компоненты постоянного тока, которые бы насытили статорный пакет, к которому могут быть приложены только относительно низкие значения В индукции.
В этой ситуации источник электропитания, который представляет собой инвертор, ведет себя как синхронизирующее устройство, то есть он представляет собой источник электропитания, который способствует движению ротора, а не мешает ему.
Эта ситуация также имеет место на стадии установившегося режима (фиг.6), на которой процесс подачи электроэнергии продолжается контролируемым способом.
Это означает, что если ротор, например, по какой-либо причине замедляется, процесс возвращается к пусковой стадии, то есть инвертор уменьшает частоту подаваемой электроэнергии, поскольку он не может подать отрицательную полуволну, если положительная полуволна не закончена, или если не ожидается достижение ротором нулевой точки.
В этой ситуации уменьшения частоты инвертор постепенно увеличивает ток согласно возврату ротора к частоте, которая соответствует заданной скорости, хотя и при разных режимах тока,
На стадии установившегося режима, если по какой-либо причине ротор рано приходит в нулевую точку, то в этой ситуации происходит уменьшение подаваемого тока, с тем, чтобы вернуть ротор к условиям, которые обеспечивают надлежащий переход через ноль; на практике это означает, что подача тока всегда осуществляется надлежащим образом и в фазе, обеспечивающей соsФ равным 1.
В качестве меры безопасности в том случае, когда происходит заклинивание или выходит из строя датчик, либо направление вращения меняется на обратное, электропитание двигателя немедленно отключается.
В этом случае процесс изучения повторяется до перезапуска двигателя; если двигатель не может быть запущен повторно ввиду заклинивания, налагается ограничение тока, которое задают при определении пускового тока.
В таком случае можно обеспечить полное или временное прекращение процесса пуска.
Изменение направления синусоидальной кривой на обратное может быть выполнено для того, чтобы имелось короткое время перед достижением ротором фактической нулевой точки.
При этом на короткий период времени синхронный двигатель становится генератором переменного тока.
При таком процессе ротор конечно же фазирован в конце каждого периода.
Это позволяет увеличить частоту выше номинальных 50 Гц частоты сети с достижением, например, 60 Гц.
При этом, поскольку напор, развиваемый насосом, является функцией квадрата скорости, и поскольку расход также изменяется соответствующим образом, можно достичь более высоких расходов без существенного повышения потребления тока.
В этом случае соsФ также остается равным 1 и обеспечивается значительная выгода в отношении получаемой мощности.
Из приведенного выше описания и из фигур очевидно, что достигаются все предлагаемые цели, и что, в частности, создан способ пуска и сохранения устойчивого режима, который обеспечивает гарантированный пуск даже двигателей средней и высокой мощности с учетом инерции как ротора, так и рабочего колеса насоса.
Кроме того, поскольку соsФ всегда практически равен 1, достигается максимальная эффективность двигателя и поэтому потребление тока всегда минимально, что предполагает значительные выгоды в отношении затрат на энергию.
Безусловно, при сохранении той же самой последовательности рабочих стадий и работы в пределах каждой стадии может быть осуществлен способ, при котором используют источники электропитания с другими типами цепей, а также с компонентами различных видов, которые предназначены для выполнения требуемых операций.
Итальянская заявка на патент N М198А001876, по отношению к которой пункты формулы изобретения данной заявки на патент обладают приоритетом, упомянута здесь в качестве ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУСКОВОЕ УСТРОЙСТВО БЕСКОНТАКТНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2461117C1 |
| АВТОНОМНАЯ СТАРТЕР-ГЕНЕРАТОРНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2011 |
|
RU2460204C1 |
| ДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ И ПРЯМЫМ ПУСКОМ ОТ СЕТИ И СПОСОБ ЕГО ВКЛЮЧЕНИЯ | 2016 |
|
RU2739874C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ И РЕГУЛИРОВАНИЯ АВТОРЕЗОНАНСНЫХ КОЛЕБАНИЙ В ЭЛЕКТРОПРИВОДЕ ВОЗВРАТНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2410826C1 |
| СПОСОБ И УСТРОЙСТВО ПУСКА ГАЗОТУРБИННОГО АГРЕГАТА | 2003 |
|
RU2251625C1 |
| Способ пуска гистерезисного электродвигателя | 1980 |
|
SU997214A1 |
| САМОЗАПУСКАЮЩИЙСЯ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1969 |
|
SU251674A1 |
| УСТРОЙСТВО АВАРИЙНОГО ОХЛАЖДЕНИЯ РЕАКТОРНОЙ УСТАНОВКИ ПРИ ЕЕ ОБЕСТОЧИВАНИИ | 2013 |
|
RU2539862C1 |
| Электрическая машина (варианты) | 1982 |
|
SU1124404A1 |
| СПОСОБ ПУСКА СИНХРОННЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096902C1 |


Изобретение относится к области электротехники и может быть использовано для питания синхронного двигателя с постоянными магнитами, приводящего в движение гидравлический насос центробежного типа. Способ электропитания в пусковом и установившемся режимах синхронного двигателя с постоянными магнитами, предназначенного для приведения в движение гидравлического насоса, содержит стадию изучения, стадию пуска и стадию установившегося режима. В течение стадии изучения ротор совершает поворот на два угла по 180o в одном направлении, при этом обеспечивается запоминание параметров ротора и, в частности, определение начального тока и механической нулевой точки ротора. В течение стадии пуска путем генерирования источником электропитания (инвертором) волн тока практически синусоидальной формы происходит пуск ротора более сильным током, чем пусковой ток, при низкой частоте, которая постепенно увеличивается, с ожиданием ротора на переходе 80, 100, 260 и 280o. Как только достигнута предполагаемая скорость установившегося режима, подают практически синусоидальный ток, и происходит ожидание ротора на переходе через нулевые точки. Положение ротора контролируют линейным магнитным датчиком положения. 14 з.п. ф-лы, 9 ил.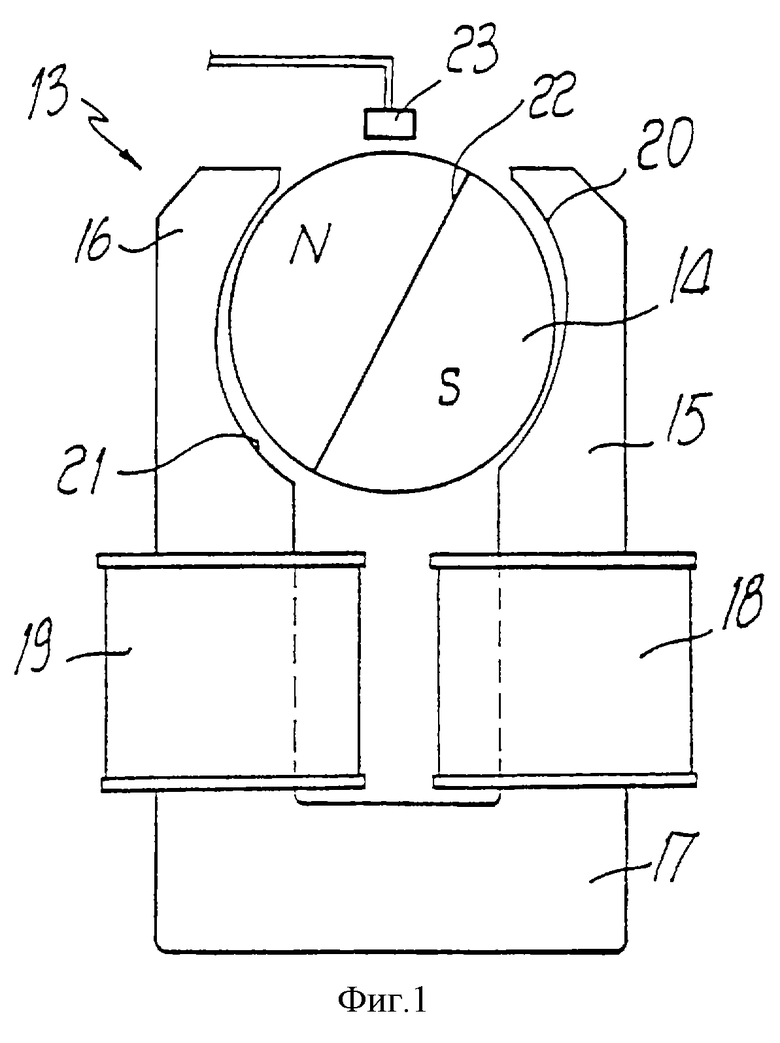
| US 5323094 А, 21.06.1994 | |||
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ИНДУКТОРНОГО ТИПА | 1993 |
|
RU2079950C1 |
| СХЕМА ПУСКА ОДНОФАЗНОГО ИНДУКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1994 |
|
RU2084074C1 |
| Способ аварийного пуска вентильного электродвигателя в заданном направлении | 1983 |
|
SU1124416A1 |
| Устройство для пуска вентильного электродвигателя | 1987 |
|
SU1539950A1 |
| US 5327052 A, 05.07.1994. | |||

