Данное изобретение касается двигателя с возбуждением от постоянных магнитов и прямым пуском от сети, в дальнейшем называемого также двигателем с постоянными магнитами и прямым пуском от сети, и способа его включения.
Предназначенный для привода центробежного насоса от трехфазной сети двигатель с постоянными магнитами и прямым пуском от сети (иногда альтернативно называемый также двигателем с возбуждением от постоянных магнитов и прямым пуском от сети, двигателем на постоянных магнитах и прямым пуском от сети или LSPM-двигателем) представляет собой трехфазный асинхронный двигатель с короткозамкнутым ротором, который содержит в роторе дополнительные постоянные магниты. После асинхронного пуска он синхронизируется с питающей частотой и дальше работает в синхронном режиме. Благодаря такому принципу работы он имеет минимальные потери в роторе и потери на возбуждение, вследствие чего достигается высокий КПД. Таким образом, он объединяет в себе преимущества надежной в эксплуатации асинхронной электрической машины с преимуществами синхронного двигателя с низкими потерями.
Двигатель такого рода обладает способностью асинхронного двигателя создавать асинхронный начальный пусковой момент, а также способностью синхронного двигателя работать со скоростью, синхронной скорости вращения вращающегося магнитного поля.
Из статьи Aliakbar Damaki Aliabad et al: «Line-Start Permanent-Magnet Motors: Significant Improvements in Starting Torque, Synchronization, and Steady-State Performance», IEEE TRANSACTIONS ON MAGNETICS, Vol. 46, No. 12, 01.12.2010, ISSN: 0018-94 64; стр. 4066 колонка 2 - стр. 4067 колонка 1, фиг. 1, стр. 4068 колонка 1 параграф А, фиг. 7, стр. 4071 таблица 1) известна концепция улучшения начального пускового момента и способности к вхождению в синхронизацию двигателей на постоянных магнитах и прямым пуском от сети, базирующаяся на полюснопереключаемой обмотке. При этом двигатель с постоянными магнитами и прямым пуском от сети включается через статорную обмотку, переключаемую на разное число полюсов, причем сначала запускается в двухполюсной схеме обмотки, а затем переключается на соответствующую режиму четырехполюсную схему обмотки. Этот способ подходит, однако, только для двигателей, которые соответственно рабочему режиму являются четырехполюсными или имеют большее число полюсов. Для двухполюсных двигателей в этой публикации не предлагается, однако, никакого решения, но насосные приводы очень часто выполняются с двухполюсными двигателями из-за необходимой частоты вращения.
Из статьи “Analytic modellina and dynamic analysis of pole-changing line-start permanent-magnet motors, IET ELECTRIC POWER APPLICATION. IET, UK. Bd. 6. Nr. 3. 8.  2012 (2012-03-08). Seiten 149-155. XP006041293. ISSN: 1751-8660, DPI: 10.1049/IET-EPA.2011.0146”, Aliakbar Damaki Aliabad, Moitaba Mirsalim, которая по содержанию является продолжением вышеупомянутой статьи, Здесь описывается принципиальная схемная реализация логических функций, при которой в качестве входных величин используются напряжение сети и индуцированное напряжение. В этой публикации в основном описываются предпочтительные условия коммутации для осуществления указанного способа. Техническое осуществление решения не рассматривается.
2012 (2012-03-08). Seiten 149-155. XP006041293. ISSN: 1751-8660, DPI: 10.1049/IET-EPA.2011.0146”, Aliakbar Damaki Aliabad, Moitaba Mirsalim, которая по содержанию является продолжением вышеупомянутой статьи, Здесь описывается принципиальная схемная реализация логических функций, при которой в качестве входных величин используются напряжение сети и индуцированное напряжение. В этой публикации в основном описываются предпочтительные условия коммутации для осуществления указанного способа. Техническое осуществление решения не рассматривается.
В заявке US 5,859,513 А описана пусковая схема, которая должна предотвращать большие знакопеременные моменты при включении двигателей с постоянными магнитами и прямым пуском от сети и после разгона при вхождении в синхронизм. Описанная в указанном документе схема может применяться только при двухфазном двигателе с двумя разделенными системами обмоток. При этом энергоснабжение осуществляется от однофазной сети.
Двигатели с постоянными магнитами и прямым пуском от сети с номинальной мощностью примерно от 4-5 кВт для снижения толчков тока при включении в сеть и в цепь валов должны подключаться к трехфазной сети подходящим для этого способом включения.
Известные до сих пор для двигателей с ротором в виде беличьей клетки способы включения, например, пуск «звезда-треугольник», пусковой трансформатор или устройство плавного пуска, представляют собой способы, которые при включении сначала понижают напряжение двигателя. Эти способы нецелесообразно применять для двигателей с постоянными магнитами и прямым пуском от сети. Причина этому лежит в физике двигателя с постоянными магнитами и прямым пуском от сети.
Двигатели с постоянными магнитами и прямым пуском от сети представляют собой комбинацию из двигателя с ротором в виде беличьей клетки и синхронного двигателя на постоянных магнитах. После включения двигатель с постоянными магнитами и прямым пуском от сети сначала разгоняется пусковой короткозамкнутой обмоткой как двигатель с ротором в виде беличьей клетки. За процессом разгона следует окончательное вхождение в синхронизм по скорости вращения, и двигатель с постоянными магнитами и прямым пуском от сети с этого момента работает в режиме синхронного двигателя с постоянными магнитами с соответствующим высоким КПД.
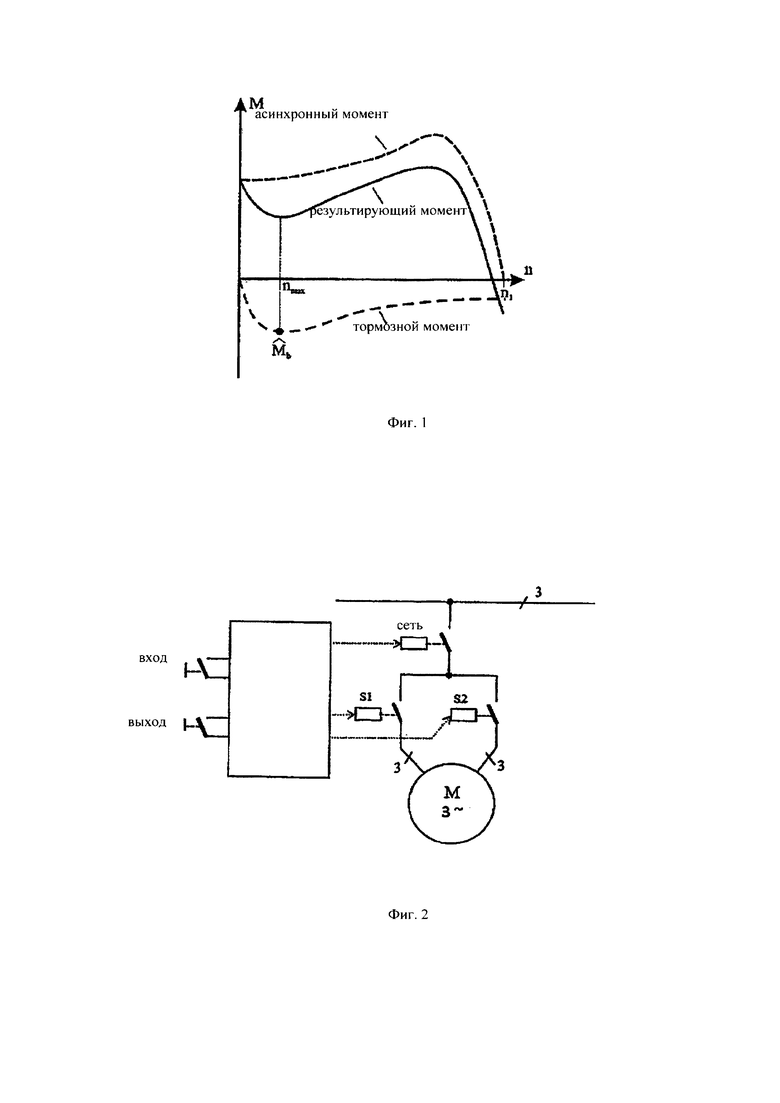
При асинхронном процессе разгона ротор с постоянными магнитами индуцирует в статорной обмотке систему напряжения с повышенным скольжением, для которой трехфазная сеть представляет собой практически короткое замыкание. В результате помимо желаемого асинхронного вращающего момента пусковой клетки присутствует дополнительный динамический (с помощью генератора) тормозной момент, который в основном препятствует процессу разгона. Наложение обеих составляющих вращающего момента схематично показано на Фиг. 1.
График динамического тормозного момента имеет выраженную седловину кривой торможения. Эта седловина кривой динамического торможения, на величину которой можно конструктивно повлиять лишь очень условно, и которая к тому же не зависит от напряжения сети, представляет собой отдельную проблему в процессе включения и разгона при пониженном напряжении.
Поскольку асинхронный крутящий момент снижается в квадратичной зависимости от снижения напряжения, а седловина кривой динамического торможения остается неизменной по своей высоте, то процесс разгона при соответственно сниженном напряжении мажет заканчиваться уже на седловине кривой динамического торможения. Асинхронный приводной момент при пониженном напряжении недостаточно велик для того, чтобы преодолеть седловину кривой динамического торможения. Поэтому при определенных обстоятельствах это ведет к подсинхронному предельному циклу (колебание относительно точки в подсинхронном диапазоне скорости вращения) двигателя на этапе включения при пониженном напряжении. На практике это зависание на седловине кривой динамического торможения имеет место уже со снижения напряжения до 80-85%. Таким образом, способы включения только с пониженным напряжением неприменимы для двигателей с постоянными магнитами и прямым пуском от сети. Поэтому ставится задача создания эффективно применяемых способов включения двигателей с постоянными магнитами и прямым пуском от сети, которые преодолеют вышеуказанные недостатки.
До сих пор такую задачу решать не требовалось, так как двигатели с постоянными магнитами и прямым пуском от сети, вопреки указанию в их названии на «прямой пуск» (Line-Start), сначала разрабатывались для работы в режиме с изменяемой скоростью вращения с помощью преобразователя напряжения и частоты вращения (U/f-Umrichter). И лишь в последние годы были заново открыты функциональные возможности такого прямого пуска в связи с потребностью в двигателях с высокой энергоэффективностью. Однако, до сих пор имеющиеся на рынке двигатели с постоянными магнитами и прямым пуском от сети покрывают лишь нижний диапазон мощностей примерно до 5 кВт. Но для этого диапазона мощностей еще не требуется никаких особых способов включения, так что в таких двигателях не возникает рассмотренная выше проблема.
Данное изобретение решает эту проблему посредством двигателя с постоянными магнитами и прямым пуском от сети, охарактеризованным признаками независимого пункта 1 формулы изобретения.
Сообразно с этим двигатель с постоянными магнитами и прямым пуском от сети, мощность которого составляет предпочтительно по меньшей мере 5 кВт, содержит ротор и статор со статорной обмоткой, причем статорная обмотка выполнена как полюснопереключаемая обмотка, индуцирующая вращающееся магнитное поле.
Благодаря этому при таком способе включения можно избежать седловины кривой динамического торможения, замедляющей разгон двигателя.
Согласно изобретению, такая полюснопереключаемая обмотка, индуцирующая вращающееся магнитное поле, содержит первую ступень обмотки и вторую ступень обмотки, которые могут работать отдельно друг от друга, причем первая ступень обмотки имеет число пар полюсов, обозначаемое ниже как число p1 пар полюсов для пуска, которое не равно числу пар полюсов второй ступени обмотки, называемому далее числом р2 рабочих пар полюсов.
Обычно первая ступень обмотки служит для асинхронного разгона двигателя, а вторая ступень обмотки - для работы двигателя в синхронном режиме. При этом предпочтительно, если первая ступень обмотки имеет такие размеры, что на кривой торможения не может возникнуть динамическая седловина.
Подавление седловины кривой динамического торможения на этапе пуска возможно, если первая ступень обмотки, используемая для асинхронного разгона двигателя, имеет число p1 пар полюсов для пуска, которое не соответствует числу р3 пар полюсов ротора с постоянными магнитами. На этапе пуска, таким образом, статорная обмотка и пусковая клетка с числом p1 пар полюсов для пуска работают как чисто асинхронный двигатель. Ротор с постоянными магнитами вследствие разного числа пар полюсов выпадает из синхронизма. Благодаря этому выпадению из синхронизма предотвращается образование седловины кривой динамического торможения. Таким образом, в процессе разгона ротор с постоянными магнитами не создает тормозной момент, который противодействовал бы пусковому моменту.
После разгона происходит переключение на вторую ступень обмотки, которая предпочтительно имеет то же число р3 пар полюсов, что и ротор с постоянными магнитами. Поэтому число р2 рабочих пар полюсов второй ступени обмотки в одном предпочтительном варианте выполнения изобретения равно числу р3 пар полюсов ротора с постоянными магнитами. Специалисту понятно, что вторая ступень обмотки предназначена для синхронного режима двигателя с постоянными магнитами и прямым пуском от сети.
Согласно еще одной предпочтительной модификации изобретения число p1 пар полюсов для пуска первой ступени обмотки меньше, чем число р2 рабочих пар полюсов второй ступени обмотки. Так, например, соотношение между числами пар полюсов первой и второй ступеней статорной обмотки может составлять 1:2. Однако, это не исключает такого варианта выполнения данного изобретения, при котором число p1 пар полюсов для пуска первой ступени обмотки может быть больше, чем число р2 рабочих пар полюсов второй обмотки.
Согласно другой модификации изобретения двигатель содержит также систему автоматического программного управления, предназначенную для того, чтобы во время процесса включения двигателя осуществлять целенаправленное переключение указанной полюснопереключаемой обмотки, индуцирующей вращающееся магнитное поле. Предпочтительно при этом происходит целенаправленное переключение с первой ступени обмотки для разгона двигателя на вторую ступень обмотки для работы двигателя в синхронном режиме.
Согласно еще одному предпочтительному варианту выполнения изобретения система автоматического программного управления предназначена также для того, чтобы между переключениями с первой ступени обмотки на вторую ступень обмотки предусмотреть этап или временной интервал, когда ни первая, ни вторая ступени обмотки не снабжаются энергией, причем предпочтительно в момент переключения на вторую ступень обмотки в зависимости от положения по фазе подается напряжение сети.
Момент переключения оказывает определяющее влияние на толчок тока при повторном включении, который может возникать с учетом сдвига по фазе напряжения сети относительно индуцированного напряжения (напряжения индуктора).
При этом предлагаемый изобретением двигатель может также содержать первый переключатель, соединенный с первой ступенью обмотки, и второй переключатель, соединенный со второй ступенью обмотки, чтобы по выбору замыкать или разрывать цепь между соответствующей ступенью обмотки и питающей линией сетевого напряжения. Предпочтительно при этом первый и второй переключатели могут приводиться в действие автоматическим программным управлением. В качестве переключателей предлагаются, в частности, контакторы.
Согласно одной дополнительной модификации изобретения те концы первого и второго переключателей, которые не соединены с соответствующими обмотками, соединены друг с другом и через сетевой выключатель подключены к питающей линии. При этом и сетевой выключатель предпочтительно выполнен приводимым в действие посредством системы автоматического программного управления.
Указанный двигатель согласно одному варианту выполнения может содержать блок предвключения для понижения напряжения между питающей линией сетевого напряжения и статорной обмоткой, чтобы ограничивать ток включения или ток повторного включения, который может возникнуть, например, при переключении с первой обмотки на вторую обмотку. При этом такой блок предвключения может быть реализован за счет предвключенных добавочных сопротивлений или за счет устройства плавного пуска.
Согласно еще одному опциональному признаку статорная обмотка выполнена в форме обмотки Даландера.
Такое выполнение статорной обмотки в форме обмотки Даландера обладает тем преимуществом, что улучшается использование активной части.
В качестве альтернативы цельному выполнению статорной обмотки в форме обмотки Даландера может быть предложена статорная обмотка, содержащая две отделенные друг от друга обмотки, каждая из которых рассчитана на разное число полюсов.
Согласно одному предпочтительному варианту выполнения изобретения указанный двигатель выполнен с возможностью сверхсинхронного переключения с первой обмотки на вторую обмотку вверх от номинальной синхронной скорости вращения n1 двигателя с постоянными магнитами и прямым пуском от сети. При этом эта номинальная скорость вращения n2 представляет собой отношение частоты сети fNetz к числу р2 рабочих пар полюсов второй ступени обмотки.
Благодаря этому при переключении с первой ступени обмотки на вторую ступень обмотки получается минимальный толчок тока при повторном включении.
Кроме того, данное изобретение касается способа включения двигателя с постоянными магнитами и прямым пуском от сети, обладающего признаками одного из вышеприведенных вариантов осуществления изобретения, причем этот способ включает в себя следующие этапы:
(i) включение первой ступени обмотки для запуска этапа асинхронного разгона,
(ii) отключение первой ступени обмотки для окончания этапа асинхронного разгона, и
(iii) подключение второй ступени обмотки, предназначенной для работы двигателя в синхронном режиме.
Согласно изобретению, вышеуказанный способ включения между этапами (ii) и (iii) предусматривает постоянный контроль напряжения сети и индуцированного напряжения индуктора для определения момента переключения, который обеспечит максимально плавное подключение к сети, причем максимально плавное подключение к сети предпочтительно допускается в тот момент переключения, когда между напряжением индуктора и напряжением сети устанавливается примерное равенство частот, и разница между напряжением сети и напряжением индуктора невелика, т.е. не превышает заранее заданное пороговое значение.
Данное изобретение и его модификации будут рассмотрены ниже более подробно на примерах выполнения, проиллюстрированных на прилагаемых чертежах. На них показано следующее.
Фиг. 1 - квазистационарная кривая крутящего момента при асинхронном разгоне обычного двигателя с постоянными магнитами и прямым пуском от сети,
Фиг. 2 - блок-схема подключения предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети,
Фиг. 3 - коммутационная последовательность показанных на Фиг. 2 переключателей во время разгона двигателя,
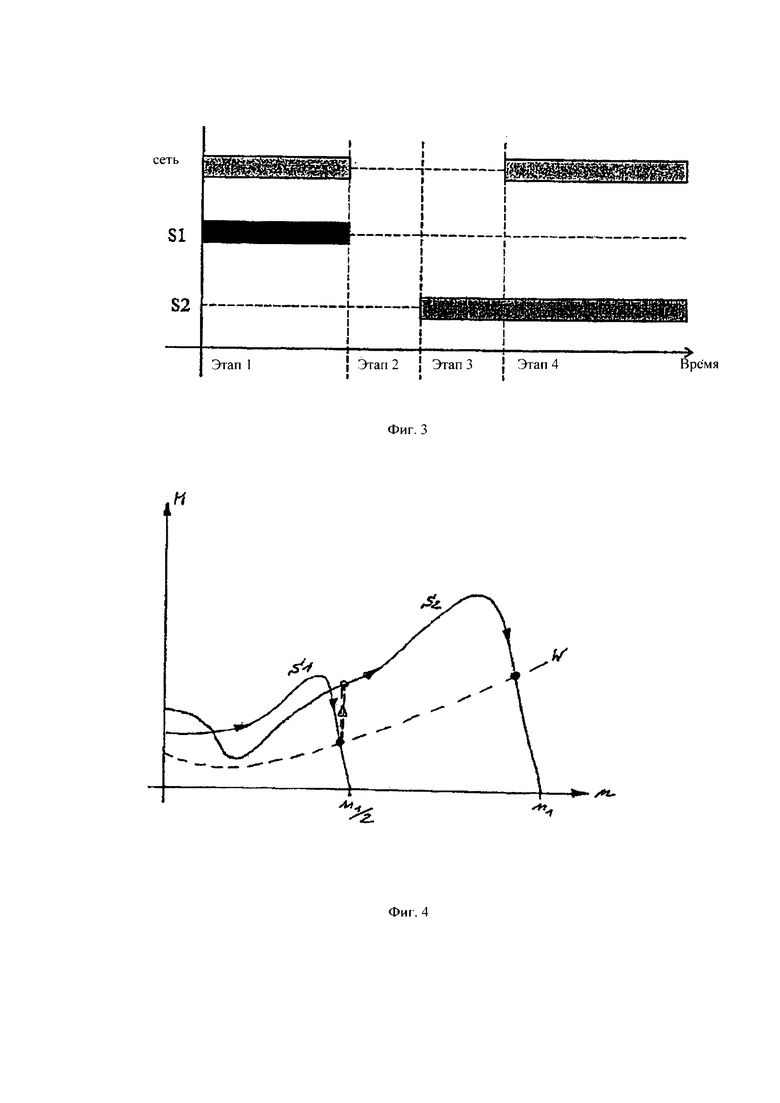
Фиг.4 - диаграмма Μ(n) процесса разгона предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети с переключением обмотки,
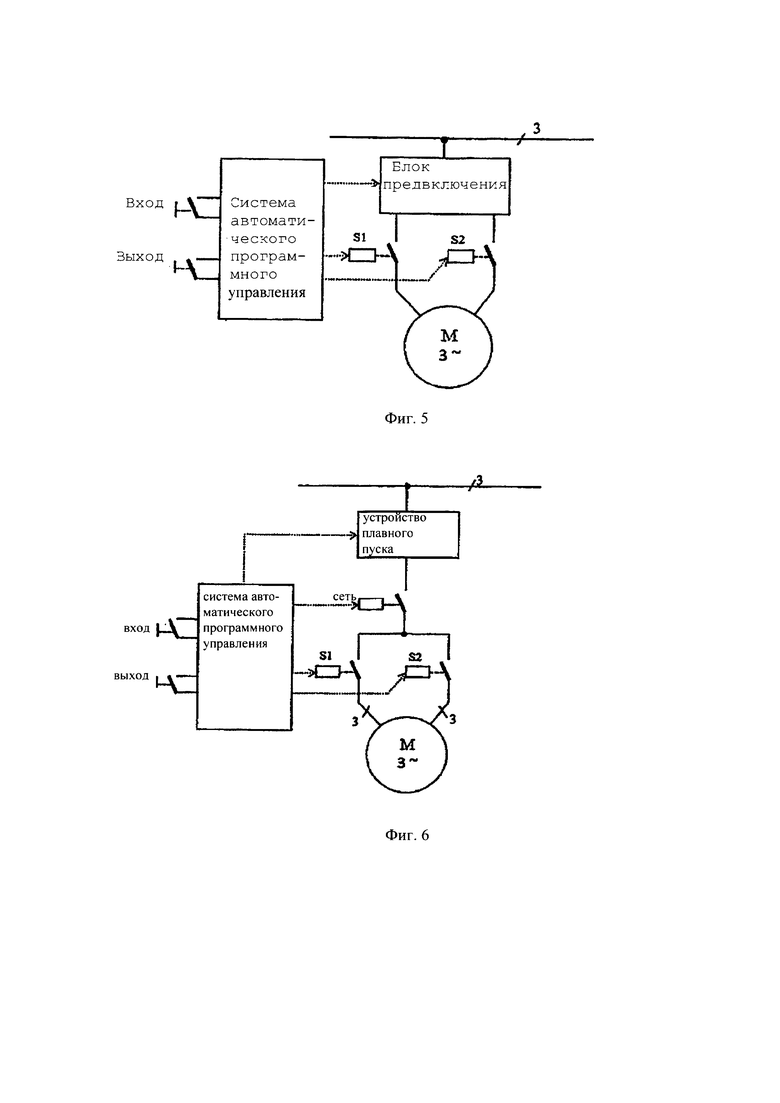
Фиг. 5 - вариант подключения предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети,
Фиг. 6 - блок-схема подключения предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети с дополнительным устройством плавного пуска,
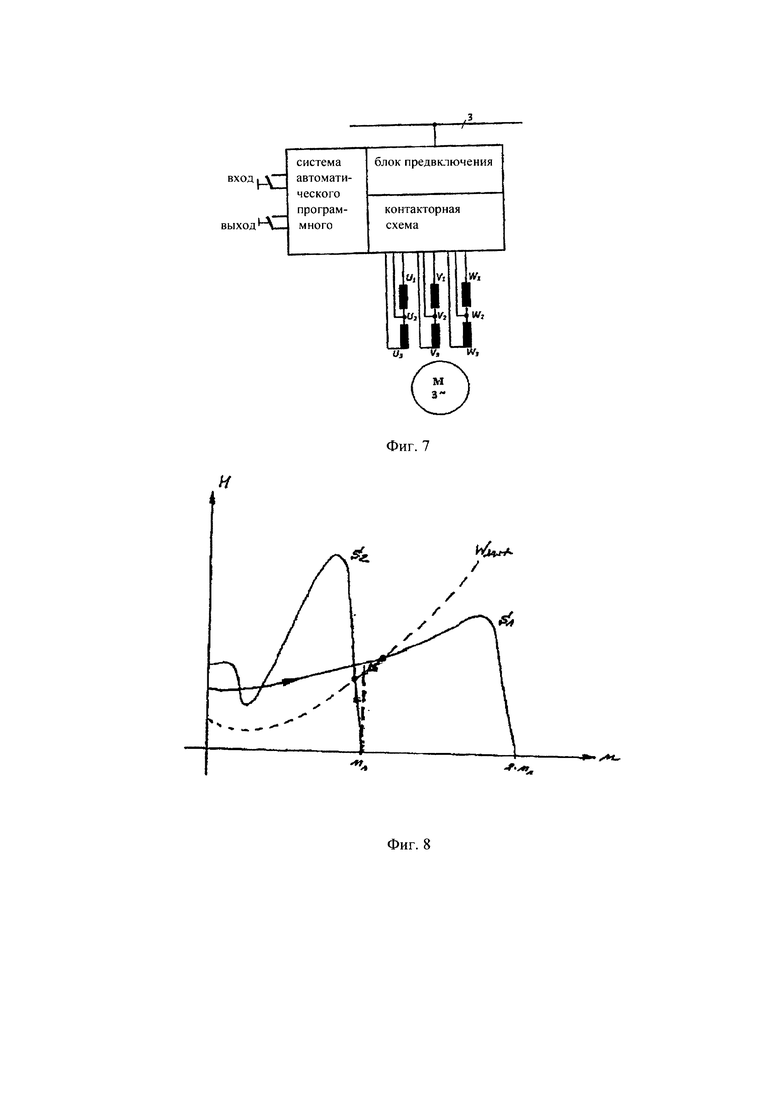
Фиг. 7 - схема подключения двигателя с постоянными магнитами и прямым пуском от сети, полюснопереключаемая статорная обмотка которого является обмоткой Даландера,
Фиг. 8 - стационарная диаграмма М(n) процесса разгона предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети со сверхсинхронным переключением обмотки, и
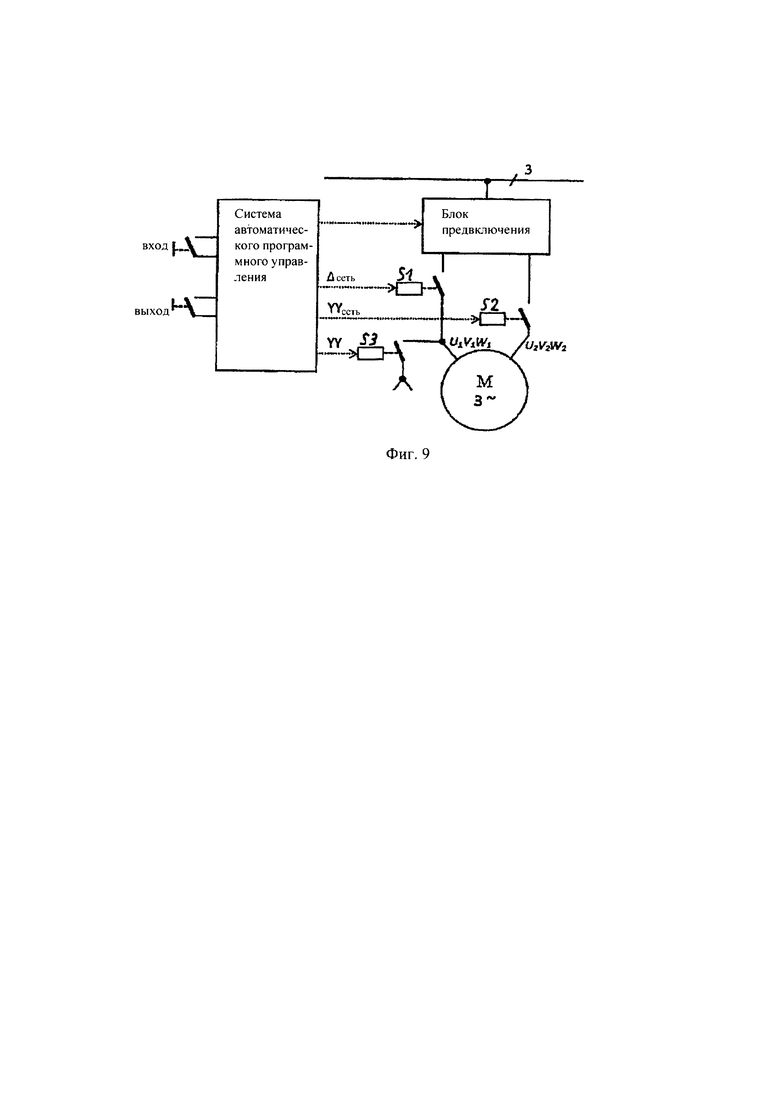
Фиг. 9 - блок-схема подключения предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети.
На Фиг. 1 представлена кривая зависимости тормозного момента от скорости вращения двигателя, подробно рассмотренная еще во вводной части описания. Проблема заключается в том, что асинхронный момент падает квадратично при снижении напряжения, а вызываемый ротором с постоянными магнитами тормозной момент остается неизменным. Таким образом, если бы потребовалось создать способ включения, при котором вначале предусматривается пониженное напряжение, то возникает опасность того, что тормозной момент будет больше, чем асинхронный момент, и он будет противодействовать ускорению ротора.
На Фиг. 2 представлена блок-схема предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети с переключением обмотки.
Всего видны три переключателя, которые выполнены как контакторы, в виде полупроводниковых контакторов и/или механических контакторов, или в виде коммутационных элементов. Переключатели S1 и S2 запитывают обмотку двигателя таким образом, что для двигателя с постоянными магнитами и прямым пуском от сети получаются две ступени обмотки. Третий переключатель, обозначаемый как «сеть», отделяет всю схему от трехфазной сети во время этапа переключения, и когда привод не работает. Первая ступень обмотки, соединенная с переключателем S1, предназначена для асинхронного разгона и имеет такие размеры, что на кривой динамического торможения не может образоваться практически никакой седловины. После асинхронного разгона происходит переключение с первой ступени обмотки на вторую ступень обмотки, которая предназначена специально для синхронного режима двигателя. При этом все переключатели, а именно S1, S2 и «сеть», соединены с системой автоматического программного управления, которая управляет срабатыванием отдельных переключателей.
На Фиг. 3 показан весь процесс включения и разгона, который разделен, по существу, на четыре коммутируемых этапа. Как уже кратко пояснялось выше, система автоматического программного управления, например, в форме программируемого контроллера с управлением от хранящейся в памяти программы или обычного релейного управления обеспечивает желаемую коммутационную последовательность переключателей. Подавление седловины на кривой динамического торможения, которая образуется обычно на коммутируемом этапе 1, возможно в том случае, если первая ступень статорной обмотки имеет число пар полюсов, отличное от числа пар полюсов ротора с постоянными магнитами. На этапе 2 статорная обмотка отключается от сети. При этом сетевой выключатель или переключатель S1 могут переводиться в разомкнутое положение одновременно или последовательно друг за другом. На этапе 3 статорная обмотка переключателем S2 переключается на вторую ступень обмотки, но сетевой выключатель все еще остается в своем разомкнутом положении. Вторая ступень обмотки при этом имеет такое же число пар полюсов, что и ротор с постоянными магнитами, чтобы реализовывать синхронный режим двигателя с постоянными магнитами и прямым пуском от сети. Для того, чтобы при включении создавался минимальный удар тока, целесообразно на этапе 3 выполнять сравнение напряжения сети и индуцированного напряжения. Даже если оба напряжения должны иметь разную частоту, переход к этапу 4, на котором сетевой выключатель замыкается, должен происходить только тогда, когда сдвиг по фазе между указанными напряжениями максимально благоприятен, т.е. когда обе системы трехфазного тока имеют максимальное совпадение по фазе.
На этапе 4 в соответствии с этим на вторую обмотку через переключатель S2 подается напряжение сети, и эта вторая обмотка, так сказать, принимает на себя ротор, запущенный с помощью первой обмотки.
На Фиг. 4 этот процесс разгона показан квазистационарным на диаграмме М(n) для того случая, когда числа пар полюсов этих двух ступеней статорной обмотки относятся друг другу как 2:1. При этом число p1 пар полюсов первой обмотки для пуска вдвое больше числа р2 рабочих пар полюсов второй обмотки. При этом показаны, по существу, две кривые, у которых по оси абсцисс показана скорость вращения двигателя, а по оси ординат показан развиваемый двигателем крутящий момент. Кривая, обозначенная как S1, при этом соответствует характеристике первой ступени обмотки, а обозначенная как S2 кривая - характеристике второй ступени обмотки. Кривая, показанная пунктиром и обозначенная как W, является при этом нагрузочной характеристикой.
При одном способе включения предлагаемого изобретением двигателя с переключением обмотки характеристика S1, начиная от скорости вращения, равной нулю, проходит до процесса переключения, обозначенной двойным пунктиром и обращенным вверх прозрачным треугольником, и сменяется на характеристику второй обмотки.
Благодаря этому совершается проход за седловину указанной характеристической кривой S2 второй ступени обмотки, которая предназначена для синхронного режима двигателя, и дальше используется та область этой характеристической кривой, на которой уже нет никакой седловины.
Описанный способ включения с переключением обмотки делает возможным дополнительное понижение напряжения на этапе включения и разгона без риска, что седловина кривой динамического торможения подавит процесс разгона, в частности, процесс разгона при пониженном напряжении.
На Фиг. 5 показано другое изображение предлагаемого изобретением варианта выполнения, при котором вместо сетевого выключателя предусмотрен блок предвключения, управляемый системой автоматического программного управления. Этот блок предвключения находится в соединении как с переключателем S1, так и с переключателем S2. Как и в показанной на Фиг. 2 схеме, задачей здесь является подавление в процессе включения седловины кривой динамического торможения, возникающей на этапе разгона. Для этого во время разгона снова обращаются к переключаемой статорной обмотке. Первая ступень обмотки включается переключателем S1, и она специально предназначена для асинхронного разгона, и имеет такие размеры, что не может образоваться никакой седловины кривой динамического торможения. Для ограничения тока включения между сетью и статорной обмоткой может быть предусмотрен понижающий напряжение блок предвключения, причем в простейшем случае речь здесь идет о предвключенных добавочных сопротивлениях или об устройстве плавного пуска.
Как пояснялось выше, после асинхронного разгона первая ступень обмотки отключается с помощью переключателя S1, и переключатель S2 включает вторую и окончательную ступень обмотки. Она специально рассчитана на синхронный режим. Для ограничения тока повторного включения при переходе на вторую ступень обмотки тоже может использоваться ограничивающий напряжение блок предвключения между сетью и статорной обмоткой.
Подавление седловины кривой динамического торможения на этапе пуска возможно, если статорная обмотка в первой ступени обмотки имеет число p1 пар полюсов для пуска, которое не совпадает с числом р3 пар полюсов ротора с постоянными магнитами. На этапе пуска статорная обмотка и пусковая клетка с числом p1 пар полюсов для пуска работают, таким образом, как чистый асинхронный двигатель. Ротор с постоянными магнитами из-за разного числа пар полюсов выпадает из синхронизма. После разгона происходит переключение на вторую ступень обмотки, на которой статорная обмотка имеет число р3 пар полюсов ротора с постоянными магнитами. В соответствии с этим статорная обмотка второй ступени обмотки имеет число р2 пар полюсов, которое предусмотрено для синхронного режима двигателя с постоянными магнитами и прямым пуском от сети. Для предотвращения седловины кривой динамического торможения статорная обмотка двигателя с постоянными магнитами и прямым пуском от сети выполнена как полюснопереключаемая обмотка, индуцирующая вращающееся магнитное поле.
При этом в основном возможен вариант выполнения, при котором имеются две отдельные статорные обмотки, которые имеют разное число пар полюсов.
На Фиг. 6 показана модификация данного изобретения с устройством плавного пуска, которое понижает напряжение двигателя и токи включения, а после периода линейно нарастающего напряжения повышает его непосредственно до напряжения сети. После разгона такое устройство плавного пуска шунтируется.
На Фиг. 7 показано подключение предлагаемого изобретением двигателя с постоянными магнитами и прямым пуском от сети, при котором статорная обмотка выполнена в форме обмотки Даландера. Преимуществом здесь является то, что лучше используется активная часть двигателя.
Согласно Фиг. 7 статорная обмотка состоит из двух частей, концы U1,2,3, V1,2,3 и W1,2,3 которых с помощью контакторной схемы могут соединяться в симметричные трехфазные схемы (звезду или треугольник, двойную звезду или двойной треугольник). На Фиг. 7 показан также ограничивающий напряжение блок предвключения между сетью и статорной обмоткой для дополнительного ограничения тока включения, соответственно, тока повторного включения. Однако, он является необязательным.
Для того, чтобы при переключении с первой ступени обмотки на вторую ступень обмотки получить минимальный толчок тока при повторном включении, такое переключение выполняется сверхсинхронным по отношению к номинальной скорости синхронного вращения n1=fNetz/р2 двигателя с постоянными магнитами и прямым пуском от сети. Такой вариант способа включения возможен, таким образом, только в том случае, если число p1 пар полюсов для пуска первой ступени обмотки меньше, чем число р2 рабочих пар полюсов второй ступени обмотки. Таким образом, такой вариант способа включения может применяться для двигателей с постоянными магнитами и прямым пуском от сети, у которых число пар полюсов р2 ≥ 2.
На Фиг. 8 показан процесс разгона в виде стационарной диаграммы М(n), на которой кривая S1 представляет собой характеристику первой ступени обмотки, кривая S2 представляет собой характеристику второй ступени обмотки, а показанная пунктиром кривая представляет собой нагрузочную характеристику.
Согласно Фиг. 8 статорная обмотка сначала в первой ступени обмотки подключается к трехфазной сети непосредственно или через опциональный блок предвключения. Статорная обмотка выполнена в отношении первой ступени обмотки таким образом, что получается стационарная рабочая точка с нагрузочной характеристикой выше синхронной номинальной скорости вращения n1=fNetz/р2. На следующем этапе статорная обмотка отключается от сети, а затем с помощью автоматического программного управления переключается на вторую ступень обмотки. Теперь статорная обмотка имеет число пар полюсов, равное числу пар полюсов ротора с постоянными магнитами, а ротор с постоянными магнитами индуцирует в статорной обмотке напряжение индуктора с частотой р2⋅n, зависящей от текущей скорости вращения.
Поскольку двигатель еще не подключен к сети, привод замедляется в соответствии с нагрузочной характеристикой. Это определяют по сползанию рабочей точки, которая находится в точке пересечения кривой S1 и нагрузочной характеристики WLast, и движется по нагрузочной характеристике WLast в сторону меньших скоростей вращения.
Обычно в этом случае задачей автоматического программного управления является контроль напряжения сети и индуцированного напряжения индуктора в смысле максимально плавного подключения к сети. Если возникает примерное равенство частот, и разница между напряжением сети и напряжением индуктора минимально мала, то статорная обмотка двигателя с постоянными магнитами и прямым пуском от сети во второй ступени обмотки подключается к трехфазной сети непосредственно или через блок предвключения. Таким образом, рабочая точка переходит с кривой S1 первой обмотки в область кривой S2 второй обмотки, и при этом седловина кривой динамического торможения не должна иметь места на кривой S2.
Если на Фиг. 8 исходят из привода центробежного насоса, и статорная обмотка подчиняется принципу Даландера, то первая ступень обмотки может быть выполнена по схеме треугольника, а вторая ступень обмотки выполнена в виде схемы двойной звезды.
На Фиг. 9 показана контакторная схема для силовой цепи. Помимо возможно используемого блока предвключения для дополнительного снижения тока включения и тока повторного включения, который опционально представлен на Фиг. 8, для реализации этого варианта включения потребуются лишь три главных контактора.
Система автоматического программного управления, которая может быть реализована, например, с помощью программируемого контроллера с управлением от хранящейся в памяти программы, (SPS), и обеспечивает необходимую коммутационную последовательность этого способа включения.
На первом этапе происходит включение статорной обмотки в первой ступени обмотки. Если необходим блок предвключения для ограничения тока включения, то он затем отключается.
На следующем за ним втором этапе происходит отключение фазы асинхронного разгона. Обычно это происходит путем прерывания подвода мощности к первой ступени обмотки.
На третьем этапе статорная обмотка переключается с первой ступени обмотки на вторую ступень обмотки. Переключатели, соответственно, контакторы S1 и S2 переключаются для этого соответствующим образом. Для второй ступени обмотки нулевая точка в электрическом соединении в звезду создается посредством переключателя, соответственно, контактора S3.
После этого напряжение сети и индуцированное напряжение индуктора контролируются, чтобы обеспечить максимально плавное повторное включение.
Затем осуществляют такое включение в благоприятный момент времени. При этом вторая ступень обмотки подключается к напряжению сети. Если необходимо использовать блок предвключения для демпфирования тока повторного включения или тока включения, то на заключительном этапе он отключается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости вращения электрической машины двойного питания | 1978 |
|
SU758455A1 |
| СПОСОБ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2498491C2 |
| Двухскоростной синхронный электро-дВигАТЕль | 1979 |
|
SU843120A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| Синхронный электродвигатель | 1976 |
|
SU758407A1 |
| УСТРОЙСТВО ДЛЯ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2502180C2 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
| СПОСОБ ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2516255C2 |
| Асинхронная машина | 1985 |
|
SU1309187A1 |
| Способ пуска синхронного компенсатора | 1940 |
|
SU73773A1 |
Изобретение относится к электротехнике, а именно к двигателю с постоянными магнитами и прямым пуском от сети, предназначенному для привода центробежного насоса от трехфазной сети, а также способу его включения, предпочтительно для двигателей мощностью по меньшей мере 5 кВт. Технический результат заключается в предотвращении динамического тормозного момента, развиваемого при асинхронном процессе разгона, путем переключения полюснопереключаемой обмотки, индуцирующей вращающееся магнитное поле, на этапе разгона. Двигатель с постоянными магнитами и прямым пуском от сети содержит ротор и статор со статорной обмоткой, причем статорная обмотка выполнена как полюснопереключаемая обмотка. При таком способе включения можно избежать седловины кривой динамического торможения, замедляющей разгон двигателя. Полюснопереключаемая обмотка содержит первую ступень обмотки и вторую ступень обмотки, которые могут работать отдельно друг от друга, причем первая ступень обмотки имеет число пар полюсов, обозначаемое ниже как число p1 пар полюсов для пуска, которое не равно числу пар полюсов второй ступени обмотки, называемому далее числом р2 рабочих пар полюсов. 2 н. и 10 з.п. ф-лы, 9 ил.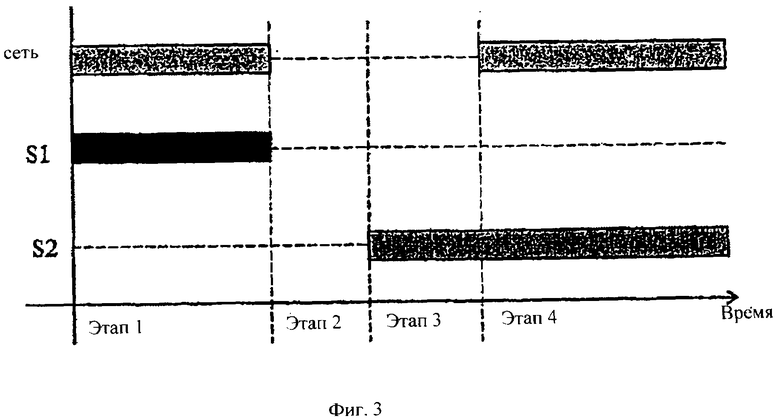
1. Двигатель с постоянными магнитами и прямым пуском от сети для привода центробежного насоса от трехфазной сети, предпочтительно мощностью по меньшей мере 5 кВт, содержащий ротор и статор со статорной обмоткой,
отличающийся тем, что статорная обмотка выполнена как полюснопереключаемая обмотка, индуцирующая вращающееся магнитное поле, причем полюснопереключаемая обмотка, индуцирующая вращающееся магнитное поле, содержит первую ступень обмотки и вторую ступень обмотки, которые выполнены с возможностью приведения в действие отдельно друг от друга, и первая ступень обмотки имеет число p1 пар полюсов для пуска, которое не равно числу р2 рабочих пар полюсов второй ступени обмотки.
2. Двигатель по п. 1, причем первая ступень обмотки предназначена для асинхронного разгона двигателя, а вторая ступень обмотки служит для работы двигателя в синхронном режиме.
3. Двигатель по п. 1 или 2, причем число p1 пар полюсов для пуска первой ступени обмотки не совпадает с числом р3 полюсов ротора с постоянными магнитами, и предпочтительно число р2 рабочих пар полюсов второй ступени обмотки равно числу р3 полюсов ротора с постоянными магнитами.
4. Двигатель по п. 1 или 2, причем число p1 пар полюсов для пуска первой ступени обмотки меньше, чем число р2 рабочих пар полюсов второй ступени обмотки.
5. Двигатель по п. 1 или 2, причем дополнительно предусмотрено автоматическое программное управление, которое выполнено с возможностью целенаправленного переключения во время процесса включения двигателя на указанную полюснопереключаемую обмотку, индуцирующую вращающееся магнитное поле, причем предпочтительно такое целенаправленное переключение происходит с первой ступени обмотки для разгона двигателя на вторую ступень обмотки для работы двигателя в синхронном режиме.
6. Двигатель по п. 5, причем система автоматического программного управления выполнена с возможностью создания между переключениями с первой ступени обмотки на вторую ступень обмотки этапа, на котором ни первая, ни вторая ступени обмотки не снабжаются энергией, причем предпочтительно момент переключения на вторую ступень обмотки зависит от сдвига фазы напряжения сети.
7. Двигатель по п. 1 или 2, причем он дополнительно содержит первый переключатель, соединенный с первой ступенью обмотки, и второй переключатель, соединенный со второй ступенью обмотки, причем предпочтительно первый и второй переключатели приводятся в действие с помощью автоматического программного управления.
8. Двигатель по п. 7, причем удаленные от обмоток концы первого и второго переключателей соединены друг с другом и через сетевой выключатель подключены к питающей линии, причем предпочтительно сетевой выключатель приводится в действие с помощью автоматического программного управления.
9. Двигатель по п. 1 или 2, причем для понижения напряжения между питающей линией сетевого напряжения и статорной обмоткой установлен блок предвключения, причем блок предвключения реализован посредством предвключенных добавочных сопротивлений.
10. Двигатель по п. 1 или 2, причем статорная обмотка выполнена в форме обмотки Даландера.
11. Двигатель по п. 1 или 2, причем этот двигатель или система автоматического программного управления выполнены с возможностью сверхсинхронного переключения по отношению к номинальной скорости синхронного вращения n1 двигателя с постоянными магнитами и прямым пуском от сети, и номинальная скорость вращения n1 равна
n1=fNetz/p2, причем
fNetz - частота сети, и
p2 - число рабочих пар полюсов второй ступени обмотки.
12. Способ включения двигателя с постоянными магнитами и прямым пуском от сети, выполненного по любому из пп. 1-11, причем этот способ включает в себя следующие этапы:
(i) включение первой ступени обмотки для запуска фазы асинхронного разгона,
(ii) отключение первой ступени обмотки для завершения фазы асинхронного разгона, и
(iii) подключение второй ступени обмотки, которая предназначена для работы двигателя в синхронном режиме, причем
постоянно осуществляют контроль напряжения сети и индуцированного напряжения индуктора, чтобы определить момент переключения, который обеспечит максимально плавное подключение к сети, причем предпочтительно момент переключения допускает максимально плавное подключение к сети тогда, когда между напряжением индуктора и напряжением сети имеет место примерное равенство частот, а разница между напряжением сети и напряжением индуктора мала, т.е. заранее заданные пороговые значения не достигаются.
| US 5859513 A, 12.01.1999 | |||
| Двухскоростной синхронный электро-дВигАТЕль | 1979 |
|
SU843120A1 |
| ИНДУКЦИОННАЯ ТИГЕЛЬНАЯ ПЕЧЬ | 1973 |
|
SU435435A1 |
| Aliakbar Damaki Aliabad et al | |||
| "Line-Start Permanent-Magnet Motors: Significant Improvements in Starting Torque, Synchronization, and Steady-State Performance", IEEE TRANSACTIONS ON MAGNETICS, Vol | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Alibad A | |||
| D | |||
| et al | |||
| "Analytic | |||

