Известны самозапускающиеся синхронные электродвигатели, коммутация обмотки якоря в которых осуществляется в функции положения полюсов ротора относительно обмотки.
Такие двигатели обладают рядом преимуществ, свойственных коллекторным электродвигателям, и отличаются хороши.ми пусковыми характеристиками. Однако наличие щеточно-коллекторного узла делает конструкцию сложной и имеющей низкую надежность, что затрудняет ее практическое использование.
Цель предлагаемого изобретения - упрощение конструкции и повышение надежности синхронного самозапускающегося электродвигателя.
Это достигается тем, что последовательно с каждой фазой обмотки включены вентили, например тиристоры, управляемые датчиком положения ротора, а вершины треугольника, образованного фазными обмотками, подключены непосредственно к трехфазной сети.
На фиг. 1 и 2 показаны два варианта выполнения электродвигателя.
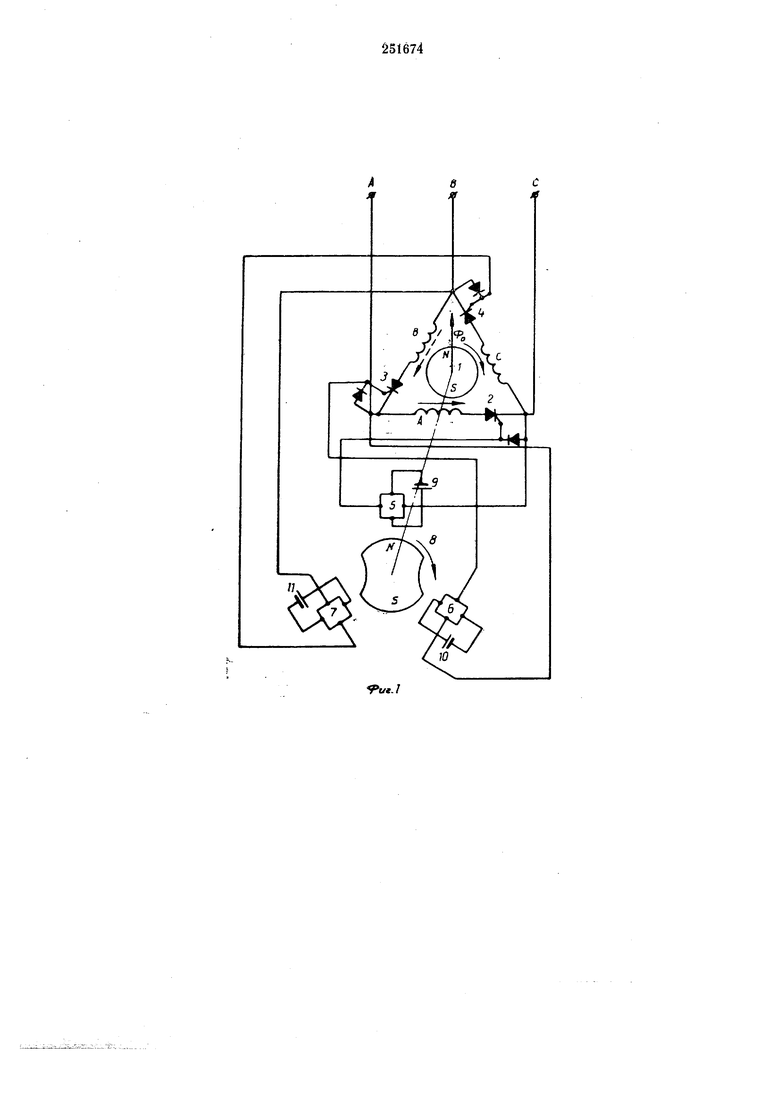
На фиг. 1 в качестве примера приведена принципиальная схема трехфазного самозапускающегося синхронного двигателя с возбуждением от постоянного магнита, расположенного на роторе /. Последовательно с каждой из фаз А, В и С обмотки статора, соединенных в треугольник, включены тиристоры 2, 3 и 4, управляемые сигналами с чувствительных элементов 5, 6 и 7 датчика пологкения ротора. Ротор 8 датчика полол ен11я, выполненный в виде постоянного магнита, закреплен на общему валу с ротором / двигателя. В качестве чувствительных элементов, неподвижных относительно статора, использованы датчики Холла, которые равномерно расположены по окружности и возбуждаются дополнительными источниками 9, 10 и И.
Величина и полярность сигнала на выходе каждого датчика Холла зависит от положения полюсов ротора /. К обмотке двигателя
подведено переменное напряжение от трехфазной сети.
В момент включення ротор двигателя, создающий магнитный поток Фо, находится в положении, показанном на фиг. 1. При этом с
чувствительного элемента 5 поступает сигнал на открывание тиристора 2. Тиристоры 3 4 остаются в закрытом состоянии вследствие отсутствия отпирающего сигнала на управляющих электродах. Таким образом, по фазе /1
начинает протекать выпрямленный ток, создающий НС статора. По фазам В и С ток не протекает. Под воздействием возпикшего вращающего момента ротор / поворачпвается и вместе с ним па такой же угол поворачиваетто момент времени нропадает отпирающий сигнал на управляющем электроде тиристора 2, и этот тиристор закрывается при изменении полярности напряжения в фазе А. Сигналом с чувствительного элемента 6 открывается тиристор 5 и по фазе В нащнает протекать выпрямленный ток, создающий НС статора. Возросший момент вызывает дальнейщий поворот ротора и т. д. Таким образом, пуск и разгон двигателя происходит подобно обычному вентильному двигателю.
Скорость вращения ротора увеличивается до тех нор, пока частота управляющих сигналов с датчика положения не станет равной частоте тока в сети. При этом частота тока в обмотке будет также равна частоте тока сети.
Дальнейщее новыщение частоты тока в обмотке происходить не будет, так как открытое состояние тиристора будет сохраняться в течение всего полунериода тока в обмотке независимо от длительности сигналов с датчика полол ения.
Таким образом частота тока в обмотке стабилизируется, и двигатель переходит в синхронный режим работы.
При работе в синхронном режиме двигателя (см. фиг. 1) по фазам протекают импульсы тока в виде полуволн синусоиды.
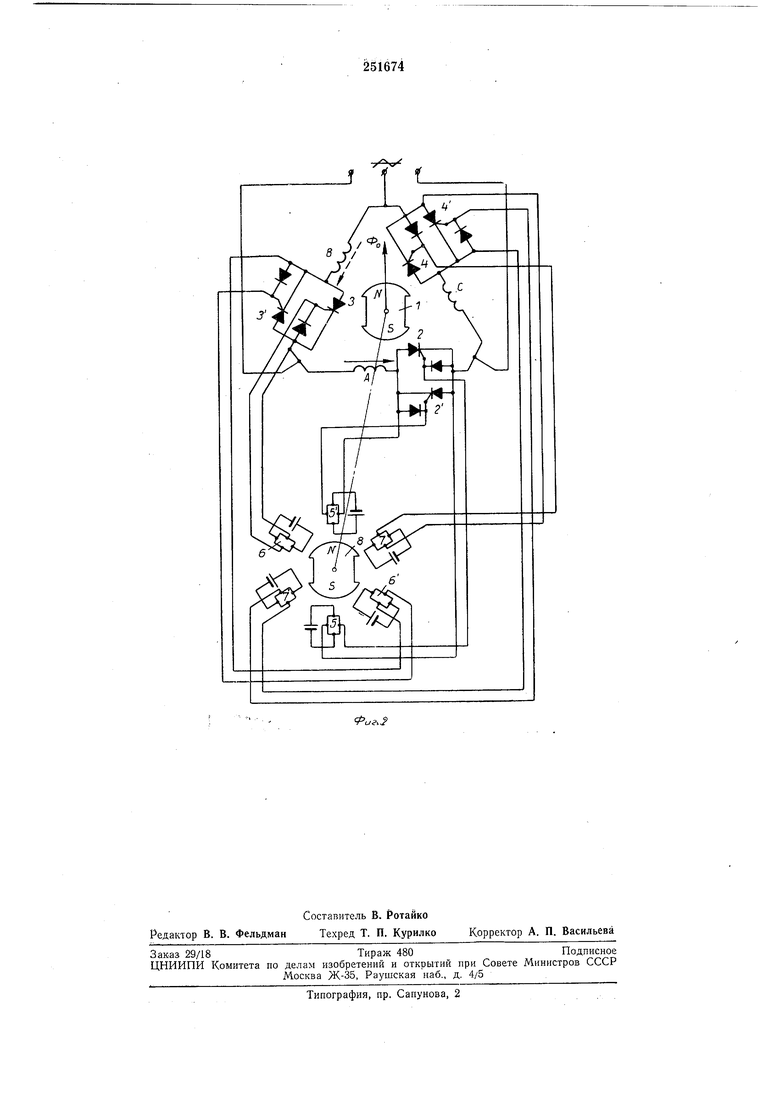
Для улучшения рабочих характеристик двигателя необходимо обеспечить в синхронном режиме протекание в обмотке синусоидального тока. С этой целью соединение и коммутация обмотки должна быть выполнена, как показана на фиг. 2.
Схема на фиг. 1 от схемы на фиг. 2 отличается тем, что последовательно с каждой фазой обмотки, соединенной в треугольник, включены два тиристора, которые соединены между собой параллельно-встречно.
Управление двумя тиристорами, например 2 и 21, осуществляется сигналами, сдвинутыми во времени на 180 эл. град, и снимаемыми с чувствительных элементов 2 и 6 датчика
положения. Положительный полупериод toKa протекает через тиристор 2, а отрицательный- через 2. Включение синхронного электродвигателя по такой схеме позволит получить от него оптимальные электромеханические и энергетические характеристики.
Таким образом, соединение обмотки трехфазного синхронного электродвигателя в треугольник и включение последовательно с
каждой фазой обмотки тиристоров, управляемых в функции положения ротора специальным датчиком положения, позволяет осуществить самозапуск и обеспечить устойчивую работу двигателя в сиихронизме.
По сравнению с обычными синхронными двигателями предлагаемый двигатель имеет улучшенные нусковые характеристики, подобные пусковым характеристикам вентильного двигателя. По сравнению с известными вентильными двигателями скорость вращения предлагаемого двигателя синхронная и определяется его полюсностью с частотой тока в сети. В предлагаемом двигателе могут быть применены различные типы датчиков положения: магнитодиоды, трансформаторные, индуктивные, лучевые и т. п.
Двигатель может быть построен с возбуждением от постоянных магнитов, с электромагнитным возбуждением, с реактивным ротором и т. п.
Предмет изобретения
Самозапускающийся синхронный электродвигатель с трехфазной обмоткой на статоре, включенной по схеме треугольника и коммутируемой в функции угла поворота ротора, отличающийся тем, что, с целью повышения надежности, последовательно с каждой фазой обмотки включены вентили, например тиристоры, управляемые датчиком положения ротора, а вершины треугольника, образованного фазными обмотками, непосредственно подключены к трехфазной сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ САМОЗАПУСКАЮЩИЙСЯ ЭЛЕКТРОДВИГАТЕЛЬ | 2007 |
|
RU2342764C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| МНОГОПОЛЮСНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2597993C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| Вентильный управляемый двигатель | 1981 |
|
SU1029346A1 |
| Универсальный бесконтактный электродвигатель | 1972 |
|
SU468337A1 |
| Устройство для пуска синхронной машины, преимущественно асинхронизированной | 1986 |
|
SU1494183A1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |