Текст описания в факсимильном виде (см. графическую часть)о
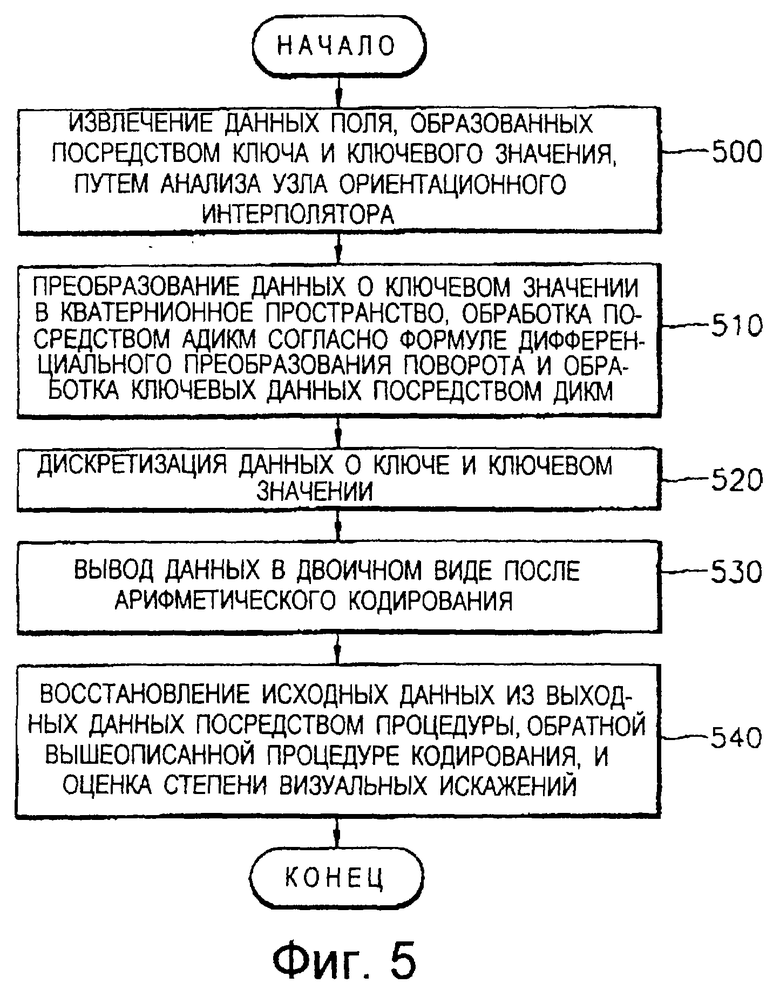
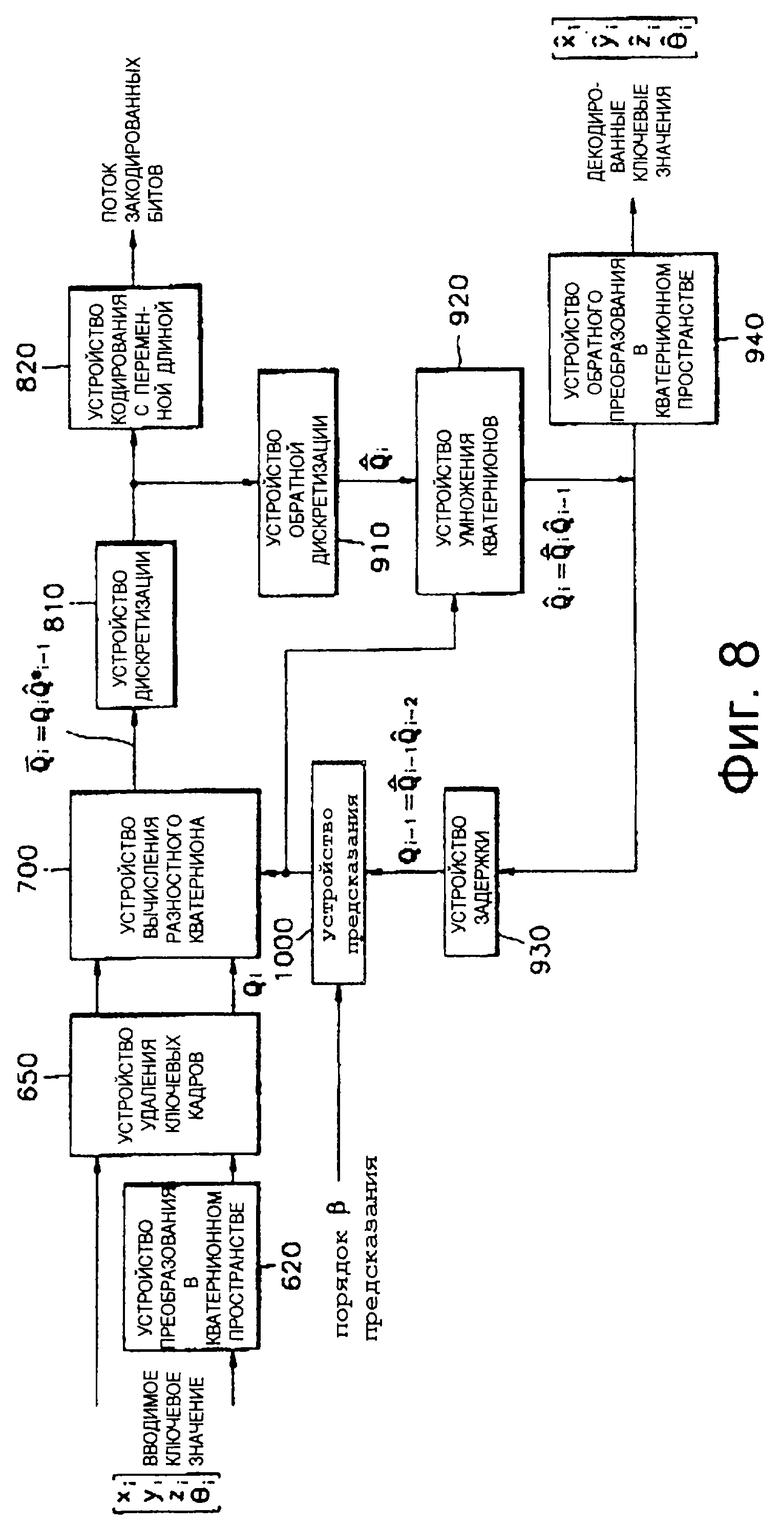
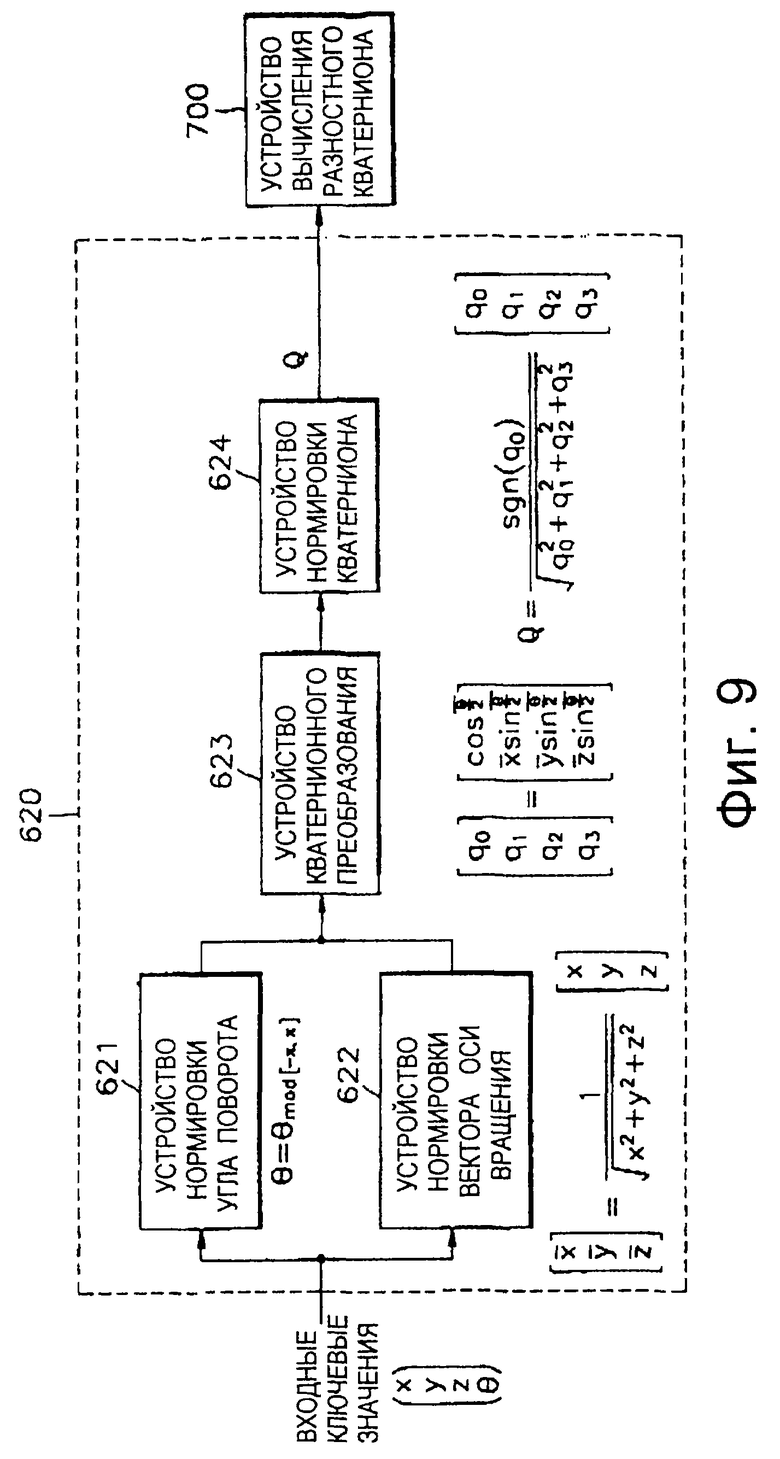
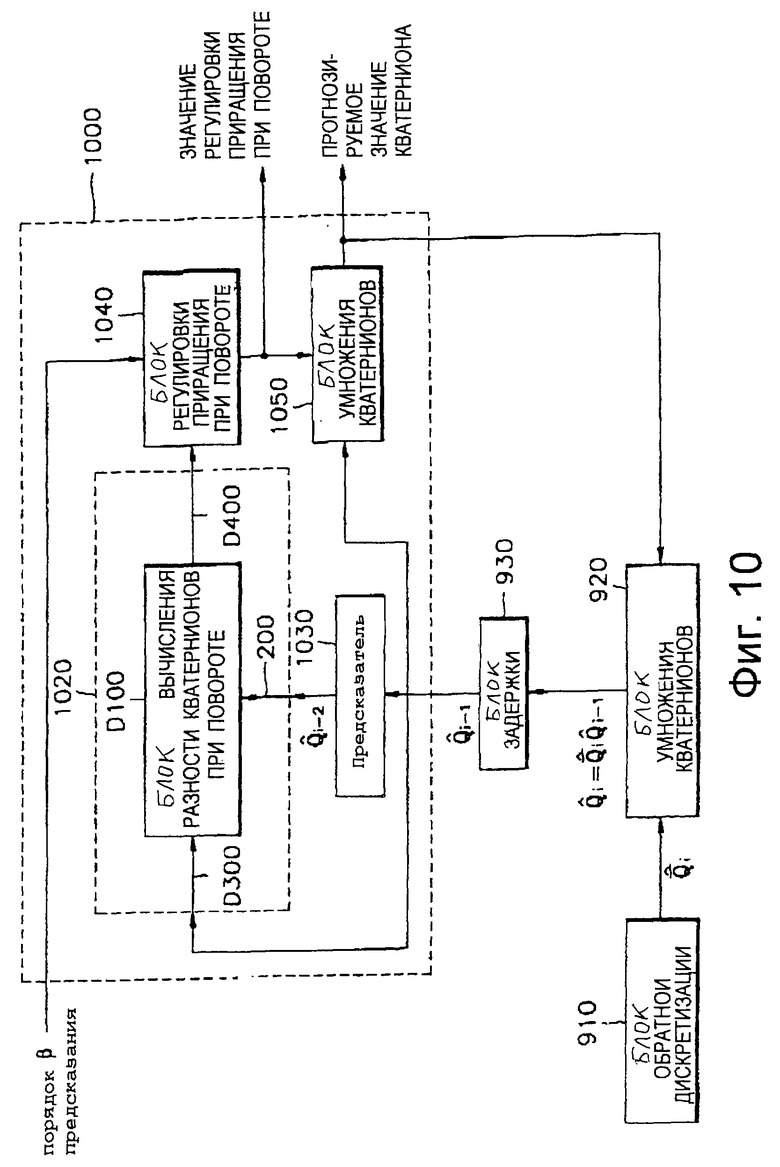
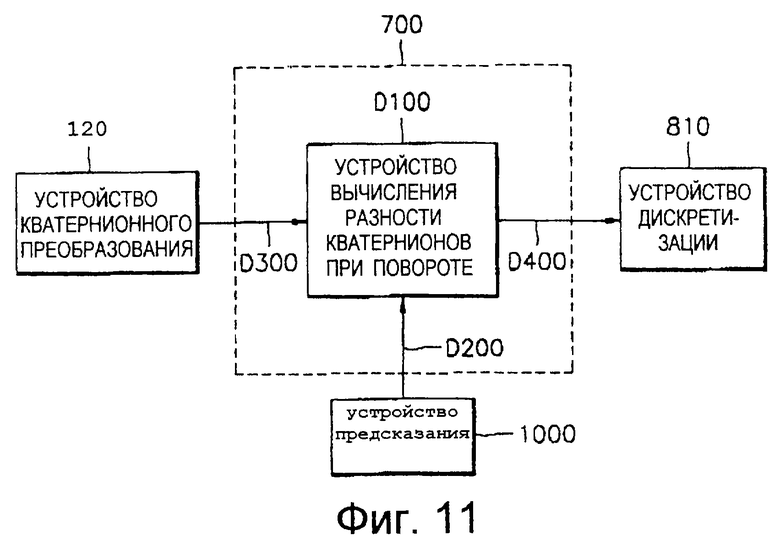
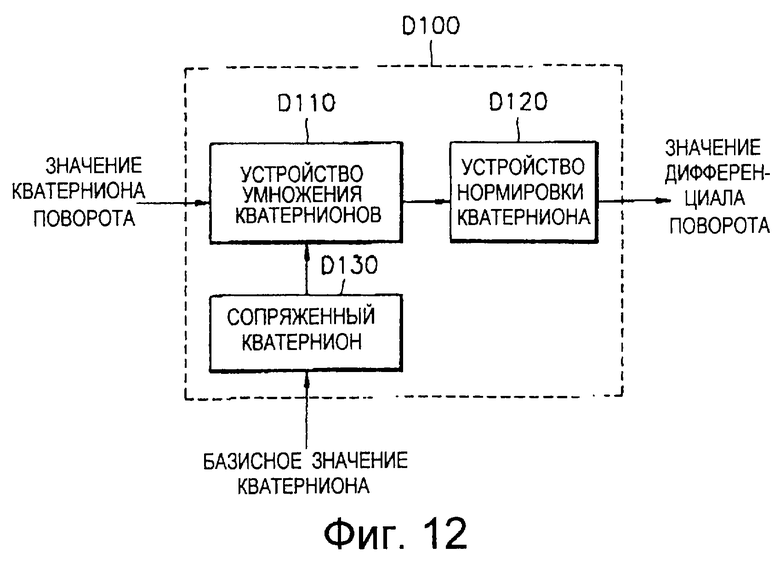
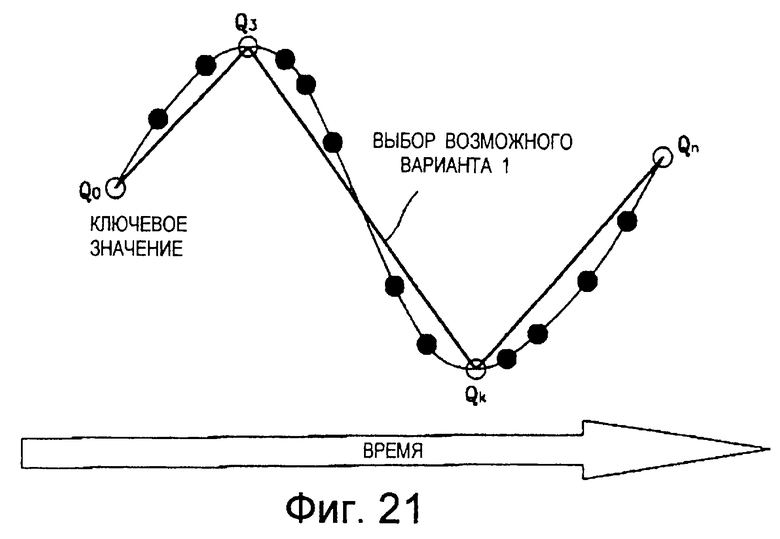
Изобретение относится к кодированию синтезированных изображений. Его использование для кодирования узла ориентационного интерполятора позволяет обеспечить технический результат в виде снижения ошибки кодирования. Этот технический результат достигается в устройстве кодирования/декодирования узла ориентационного интерполятора, которое содержит блок обработки посредством дифференциальной модуляции для преобразования значений ключа в данных поля, когда имеет место вращательное движение, в кватернионную форму; блок дискретизации для дискретизации обработанных посредством ДИКМ данных о значениях ключа; блок кодирования с переменной длиной для кодирования с переменной длиной дискретизированных разностных данных о значениях ключа; блок обратной дискретизации для обратной дискретизации дискретизированных разностных данных о значениях ключа; блок умножения кватернионов для кватернионного умножения разностных данных о значениях ключа, над которыми выполнена операция обратной дискретизации, и для умножения результата на предыдущее декодированное значение ключа; блок задержки для задержки выходного сигнала блока умножения кватернионов и блок предсказания с функцией управления порядком предсказания, который получает выходной сигнал блока задержки, осуществляет предсказание входного значения, подлежащего кодированию, и осуществляет регулируемое управление порядком предсказания. 2 с. и 4 з.п. ф-лы, 21 ил.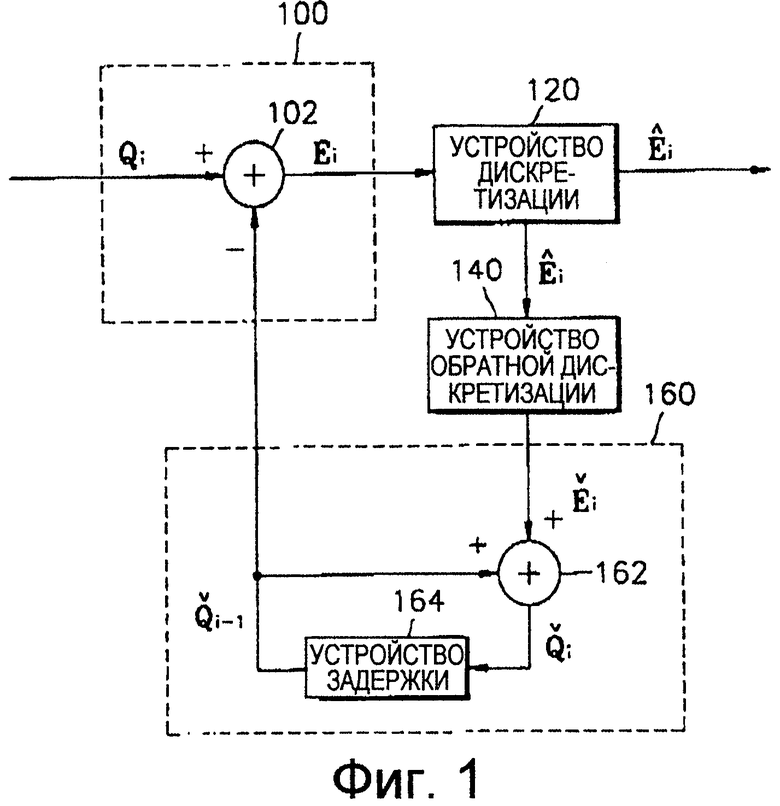
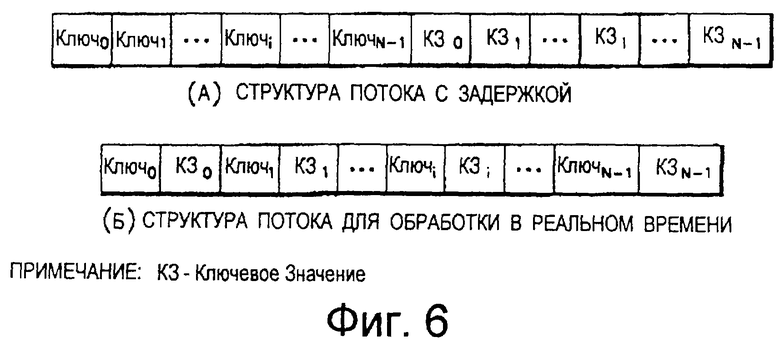
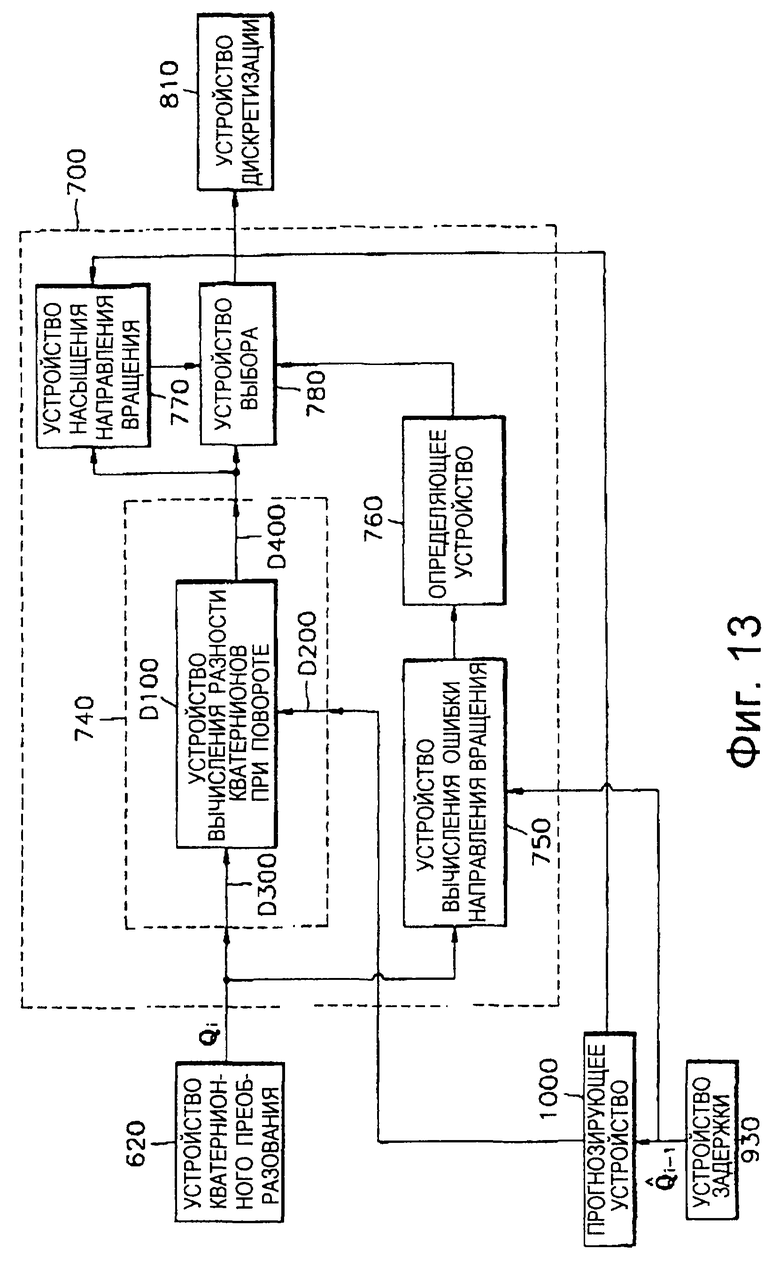
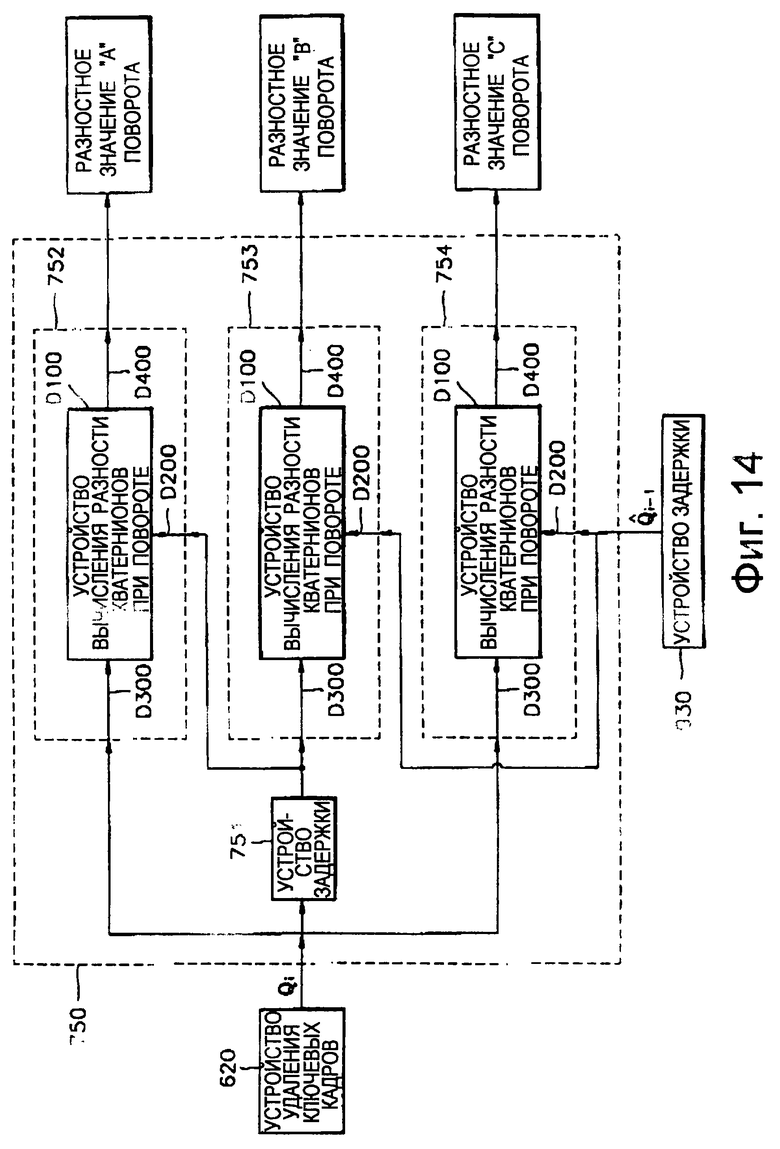
1. Устройство кодирования/декодирования узла ориентационного интерполятора, которое обеспечивает информацию о повороте объекта в трехмерном пространстве, причем устройство кодирования/декодирования содержит блок обработки посредством дифференциальной модуляции, осуществляющий дифференциальную импульсно-кодовую модуляцию (ДИКМ) посредством преобразования значения ключа в данных поля, имеющих ключ, представляющий собой информацию о позиции на временной оси, когда имеет место вращательное движение, и значения ключа, представляющие собой информацию о вращении, соответствующую информации о позиции на временной оси, в кватернионную форму, блок дискретизации, осуществляющий дискретизацию обработанных посредством ДИКМ данных о значениях ключа и вывод дискретизированных данных о значениях ключа, блок кодирования с переменной длиной, осуществляющий кодирование с переменной длиной дискретизированных разностных данных о значениях ключа, блок обратной дискретизации, осуществляющий операцию обратной дискретизации дискретизированных разностных данных о значениях ключа и вывод разностных данных о значениях ключа, над которыми выполнена операция обратной дискретизации, блок умножения кватернионов, осуществляющий кватернионное умножение разностных данных о значениях ключа, над которыми выполнена операция обратной дискретизации, и умножение результата на предыдущее декодированное значение ключа; блок задержки, осуществляющий задержку выходного сигнала блока умножения кватернионов, и блок предсказания, имеющий функцию управления порядком предсказания, который получает выходной сигнал блока задержки, осуществляет предсказание входного значения, подлежащего кодированию, и осуществляет регулируемое управление порядком предсказания.2. Устройство кодирования/декодирования узла ориентационного интерполятора по п.1, в котором блок предсказания содержит блок умножения кватернионов, осуществляющий генерацию значения, которое является произведением всех разностных значений поворота, восстановленных до момента времени, указанного посредством вводимой в данный момент времени информации в виде кватерниона, блок задержки, осуществляющий генерацию информации о временной последовательности посредством многоступенчатой задержки сигналов с выхода блока умножения кватернионов, блок умножения, выполняющий генерацию значения предсказания текущего положения при повороте, генерацию которого осуществляют посредством линейной комбинации значений, полученных с выхода блока задержки, в кватернионном пространстве, и предсказатель, осуществляющий прием сигнала с выхода блока умножения и сигнала порядка предсказания, который определяет взвешенное значение между значениями предсказания, и выполняет операцию предсказания с изменяемым порядком посредством линейной комбинации выходного сигнала блока умножения и взвешенного значения между значениями предсказания.3. Устройство кодирования/декодирования узла ориентационного интерполятора по п.1 или 2, дополнительно содержащее блок корректировки направления вращения, осуществляющий функцию корректировки направления вращения, которая при генерации значения разностного кватерниона в предсказателе и в блоке обработки посредством дифференциальной импульсно-кодовой модуляции обеспечивает вращение объекта в том же самом направлении, что и направление вращения, указанное посредством исходной информации о повороте.4. Устройство кодирования/декодирования узла ориентационного интерполятора по п.1, в котором при операции удаления ключа и соответствующей ключу информации о значении ключа блок удаления ключевых кадров осуществляет удаление ключа и соответствующей ключу информации о значении ключа в том случае, если разность между анимационной траекторией после удаления ключа и информации о значении ключа и анимационной траекторией до удаления ключа и информации о значении ключа меньше заранее заданного опорного значения.5. Способ кодирования/декодирования данных узла ориентационного интерполятора, который обеспечивает информацию о повороте объекта в трехмерном пространстве, причем способ кодирования/декодирования содержит этапы: выполняют дифференциальную импульсно-кодовую модуляцию (ДИКМ) посредством преобразования значения ключа в данных, имеющих ключ, представляющий собой информацию о позиции на временной оси, когда имеет место вращательное движение, и значение ключа, представляющее собой информацию о вращении, соответствующую информации о позиции на временной оси, в кватернионную форму, дискретизируют обработанные с помощью ДИКМ данные значений ключа и выдают дискретизированные данные значений ключа, осуществляют кодирование с переменной длиной дискретизированных разностных данных о значениях ключа, осуществляют обратную дискретизацию дискретизированных разностных данных о значениях ключа и выдают разностные данные о значениях ключа, над которыми выполнена операция обратной дискретизации, выполняют умножение кватернионов обратно дискретизированных разностных данных о значениях ключа и умножают результат на предыдущее декодированное значение ключа, осуществляют задержку выходного сигнала блока умножения кватернионов, и принимают задержанный выходной сигнал, осуществляют предсказание входного значения, подлежащее кодированию следующим, и регулируют порядок предсказания.6. Способ кодирования/декодирования данных узла ориентационного интерполятора по п.5, в котором этап (g) дополнительно содержит этапы: (g1) формируют значение, которое является произведением всех разностных значений поворота, восстановленных до момента времени, указанного посредством вводимой в данный момент времени информации, в виде кватерниона, (g2) формируют информацию о временной последовательности посредством многоступенчатой задержки сигналов с выхода блока умножения кватернионов, (g3) формируют значение предсказания текущей информации о повороте, которая сформирована линейной комбинацией на кватернионном пространстве сформированной информации о временной последовательности, и (g4) принимают перемноженное значение и порядок предсказания, которое определяет взвешенное значение между значениями предсказания, и выполняют операцию предсказания с переменным порядком предсказания посредством линейной комбинации, имеющей перемноженное значение и взвешенное значение между значениями предсказания.