Предлагаемое изобретение относится к устройствам для управления транспортными средствами с помощью дифференциального привода движителей, расположенных на противоположных сторонах транспортного средства, использующим гидравлический привод. Преимущественной областью применения являются гусеничные транспортные и тяговые машины.
В настоящее время механизмы бесступенчатого поворота получили широкое применение на зарубежных гусеничных тракторах John Deere, Caterpillar и др., а также на боевых гусеничных машинах.
Известные механизмы бесступенчатого поворота выполнены по различным схемам. Наиболее широкое распространение получили механизмы, которые условно можно назвать "с дифференциалами на выходе". В них ведущие элементы движителей приводятся от выходных валов одинаковых планетарных дифференциалов, а входные валы планетарных дифференциалов служат для подвода силового и управляющего потоков мощности, причем валы силового потока вращаются синхронно, а валы управляющего потока связаны между собой кинематической цепью с передаточным числом равным -1. При прямолинейном движении они неподвижны и нагружены реактивным моментом, а для осуществления поворота получают от вспомогательного привода (чаще всего от объемной гидростатической передачи) разнонаправленное вращение, в результате чего выходной вал одного дифференциала ускоряется, а другого замедляется.
В качестве аналога, выполненного по этому варианту схемы, может рассматриваться механизм бесступенчатого поворота шасси МТ-С (В.Ф.Платонов и др. Гусеничные и колесные транспортно-тяговые машины. - М.: Машиностроение, 1986 г., стр. 149, рис.52).
Фирма Caterpillar на своих тракторах (материалы фирмы Caterpillar "SENR4242", являющиеся составной частью руководства по эксплуатации трактора Challenger 65) применила другую схему механизма бесступенчатого поворота (фиг. 1), которую условно можно назвать "с дифференциалом на входе". Эта схема состоит из силового контура (включающего ведущую и ведомую шестерни главной передачи, несимметричный силовой дифференциал, промежуточный вал и согласующий планетарный редуктор) и системы управления (включающей гидромотор, шестерни привода управляющего дифференциала, управляющий дифференциал), а также полуосей. Ведомая шестерня главной передачи соединена с водилом силового дифференциала. Эпицикл силового дифференциала соединен с водилом управляющего дифференциала и левой полуосью. Промежуточный вал соединяет солнечные шестерни всех трех планетарных механизмов. Правая полуось соединена с водилом согласующего планетарного редуктора, эпицикл которого закреплен на неподвижном корпусе.
В этом механизме силовой поток через ведущую и ведомую шестерни главной передачи поступает на водило несимметричного силового дифференциала и далее через сателлиты на эпицикл и солнечную шестерню. Отношение крутящих моментов, создаваемых сателлитами на эпицикле и солнечной шестерне, равно Кс - отношению чисел зубьев эпицикла и солнечной шестерни. Поскольку при прямолинейном движении мощности, передаваемые к левому и правому борту должны быть одинаковы, такое же отношение должна иметь частота вращения солнечной шестерни к частоте вращения эпицикла. Согласующий редуктор служит для синхронизации частот вращения полуосей при прямолинейном движении.
Транспортное средство должно иметь равную возможность поворота влево и вправо, поэтому при прямолинейном движении вал гидромотора, шестерни и эпицикл должны быть неподвижны. При отношении частоты вращения солнечной шестерни силового дифференциала (а вместе с ней промежуточного вала и остальных солнечных шестерен) к частоте вращения эпицикла силового дифференциала (а вместе с ним водила управляющего дифференциала и полуоси), равного Кс, это требование может быть выполнено при отношении чисел зубьев эицикла и солнечной шестерни управляющего дифференциала Ку=Кс-1.
Для осуществления поворота забегающая гусеница должна иметь по отношению к отстающей большую скорость и большую тягу для преодоления момента сопротивления повороту. Вращение вала гидромотора вызывает вращение шестерен и эпицикла управляющего дифференциала, в результате чего происходит разнонаправленное изменение частоты вращения водила и солнечной шестерни, т.е. связанных с ними кинематически соответственно левой и правой полуосей.
Этот механизм бесступенчатого поворота наиболее близок по технической сущности к предлагаемому и выбран в качестве прототипа.
Общей особенностью приведенных выше схем механизмов бесступенчатого поворота является изменение частоты вращения выходных валов дифференциалов, передающих силовой поток, по отношению к частоте вращения входных валов, подводящих силовой поток. Поскольку указанное изменение частоты вращения осуществляется за счет взаимного вращения зубчатых колес, передающих силовой поток, оно неизбежно вызывает потери мощности при прямолинейном движении транспортного средства.
Задача предлагаемого изобретения состоит в уменьшении потерь мощности в механизме бесступенчатого поворота.
Для решения поставленной задачи в известном механизме бесступенчатого поворота, содержащем корпус, главную передачу с ведущей и ведомой шестернями, силовой дифференциал, систему управления, включающую гидромотор и управляющий планетарный дифференциал, кинематически связанный с гидромотором, а также полуоси левого и правого движителя, согласно изобретению силовой дифференциал выполнен симметричным, а система управления дополнительно снабжена опорным планетарным редуктором, расположенным соосно с управляющим планетарным дифференциалом, причем в качестве симметричного силового дифференциала использован дифференциал с коническими шестернями или дифференциал с парными цилиндрическими сателлитами. При этом два одноименных элемента (два эпицикла, два водила или две солнечные шестерни) планетарных механизмов управляющего дифференциала и опорного редуктора жестко соединяются, из двух других одноименных элементов - один соединяется с приводом от гидромотора, а другой - с корпусом механизма поворота, элементы оставшейся пары соединяются каждый со своей полуосью или один из них с полуосью, а другой - с корпусом силового дифференциала.
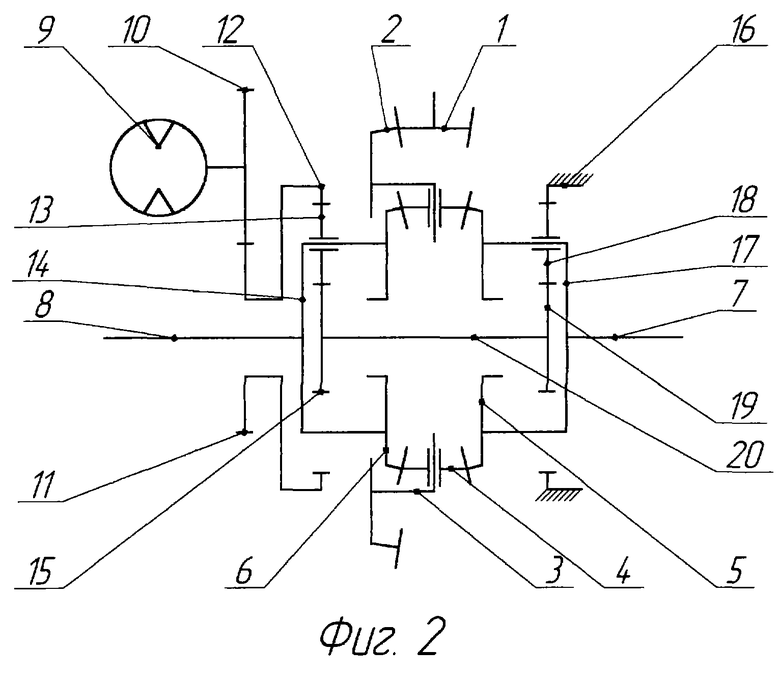
Кинематические схемы различных вариантов механизма бесступенчатого поворота, иллюстрирующие предлагаемое изобретение, по вариантам 1 и 2 приведены соответственно на фигурах 2 и 3.
Предлагаемый механизм бесступенчатого поворота по варианту 1 (фиг.2) состоит из силового контура, который включает ведущую 1 и ведомую 2 шестерни главной передачи, силовой симметричный дифференциал с корпусом (водилом) 3, сателлитами 4 и полуосевыми шестернями 5 и 6; правую 7 и левую 8 полуось, а также из системы управления, включающей гидромотор 9, шестерни 10 и 11 привода управляющего дифференциала, управляющий дифференциал с эпициклом 12, сателлитами 13 водилом 14 и солнечной шестерней 15, опорный планетарный редуктор с эпициклом 16, водилом 17 с сателлитами 18 и солнечной шестерней 19, а также вал 20. Эпицикл управляющего дифференциала 12 соединен с шестерней 11; водило управляющего дифференциала 14 соединено с полуосью 8, а солнечные шестерни 15 и 19 объединяются в блок валом 20. Отношение чисел зубьев эпициклов 12 и 16 к числам зубьев солнечных шестерен 15 и 19 соответственно должно быть одинаковым.
Силовой поток через ведущую 1 и ведомую 2 шестерни главной передачи поступает на корпус симметричного дифференциала 3 и далее через сателлиты 4 на полуосевые шестерни 5 и 6. Симметричный дифференциал разделяет подводимый к нему момент между полуосевыми шестернями поровну, поэтому ведомая шестерня 2, водило дифференциала (корпус дифференциала) 3, сателлиты 4, полуосевые шестерни 5 и 6 и полуоси 7 и 8 при прямолинейном движении вращаются как единое целое без перемещения деталей относительно друг друга, что исключает потери мощности, связанные с передачей мощности вращающимися шестернями. При прямолинейном движении сателлиты 13 и 18 обкатываются по неподвижным эпициклам 12 и 16, приводя во вращение солнечные шестерни 15 и 19 и вал 20, но при равенстве моментов на полуосях это вращение происходит без передачи мощности и, следовательно, практически без потерь мощности.
Для осуществления поворота приводится во вращение вал гидромотора 9 и через шестерни 10 и 11 эпицикл 12. Вращение эпицикла 12 относительно неподвижного эпицикла 16 вследствие синхронного вращения солнечных шестерен 15 и 19 возможно только при разных частотах вращения водила 17 и водила 14, вращающегося совместно с полуосью 8 и полуосевой шестерней 6. При этом возникает вращение другой полуосевой шестерни 5 и полуоси 7 относительно корпуса дифференциала 3, но в противоположном направлении. Это приведет к различной частоте вращения движителей левого и правого бортов и к повороту транспортного средства.
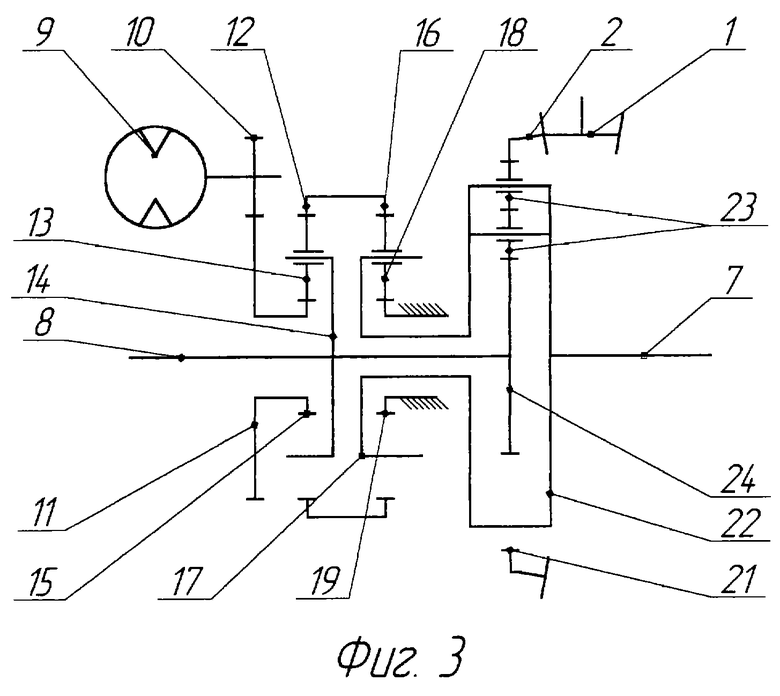
На фиг. 3. показан пример схемы механизма бесступенчатого поворота транспортной машины по второму варианту исполнения с использованием силового дифференциала с парными сателлитами. Механизм содержит ведущую 1 и ведомую 2 шестерни главной передачи, силовой дифференциал с эпициклом 21, водилом 22 с парными сателлитами 23 и солнечной шестерней 24; систему управления состоящую из гидромотора 9, управляющего дифференциала, приводимого от гидромотора шестернями 10 и 11 и включающего эпицикл 12, водило 14 с сателлитами 13 и солнечную шестерню 15, опорный редуктор включающий эпицикл 16, водило 17 с сателлитами 18 и солнечную шестерню 19, а также полуоси 7 и 8. Силовой дифференциал, выполненный по показанной схеме, будет симметричным при условии, что число зубьев эпицикла ровно вдвое больше числа зубьев его солнечной шестерни.
Ведомая шестерня главной передачи 2 жестко соединена с эпициклом силового дифференциала 21. Водило силового дифференциала 22 соединено с полуосью 7 и водилом опорного редуктора 17, а солнечная шестерня силового дифференциала 24 соединена с полуосью 8. Эпициклы управляющего дифференциала 12 и опорного редуктора 16 жестко соединены. Водило управляющего редуктора соединено с полуосью 8: солнечная шестерня опорного редуктора 19 жестко соединена с корпусом механизма поворота, а солнечная шестерня управляющего дифференциала 15 с помощью шестерен 10 и 11 кинематически связана с гидромотором 9.
Точно так же, как в механизме, кинематическая схема которого представлена на фиг. 2, при прямолинейном движении ведомая шестерня 2, эпицикл 21, водило 22, солнечная шестерня 24, полуоси 7 и 8 вращаются синхронно, как единое целое. При этом сателлиты управляющего дифференциала 13 и опорного редуктора 18 обкатываются вокруг неподвижных солнечных шестерен 15 и 19 соответственно, вращают соединенные эпициклы 12 и 16, но при равенстве моментов на полуосях управляющий дифференциал и опорный редуктор не нагружены.
Предлагаемое техническое решение является новым, имеющим изобретательский уровень и промышленно применимым. В настоящее время ведется рабочее проектирование механизма бесступенчатого поворота, использующего одну из приведенных схем. Применение предлагаемого механизма бесступенчатого поворота позволит уменьшить потери мощности при движении транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| МУЛЬТИДИФФЕРЕНЦИАЛ ВЕДУЩЕЙ ОСИ | 2018 |
|
RU2684846C1 |
| Трансмиссия гусеничного транспортного средства | 1989 |
|
SU1691207A1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2136512C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2142885C1 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2153425C2 |
Изобретение относится к устройствам для управления транспортными средствами с помощью дифференциального привода движителей, расположенных на противоположных сторонах транспортного средства, использующим гидравлический привод. Преимущественной областью применения являются гусеничные транспортные и тяговые машины. Механизм бесступенчатого поворота транспортных машин содержит корпус, главную передачу с ведущей 1 и ведомой 2 шестернями, симметричный силовой дифференциал, кинематически связанный с шестерней 2, систему управления, включающую гидромотор 9 и соосно расположенные опорный планетарный редуктор и управляющий планетарный дифференциал, кинематически связанный с гидромотором 9. В качестве симметричного силового дифференциала использован дифференциал с коническими шестернями, водило 3 которого жестко соединено с шестерней 2, а полуосевые шестерни 5 и 6 связаны каждая со своей полуосью 7, 8. У управляющего дифференциала и опорного редуктора солнечные шестерни 15, 19 жестко соединены. Эпицикл 16 соединен с корпусом механизма поворота. Эпицикл 12 кинематически связан с гидромотором 9. Водило 14 соединено с полуосевой шестерней 6 и полуосью 8. Водило 17 соединено с полуосевой шестерней 5 и полуосью 7. В качестве симметричного силового дифференциала может быть использован и дифференциал с парными сателлитами. Технический результат - уменьшение потерь мощности. 2 с.п. ф-лы, 3 ил.
| СПОСОБ ПОЛУЧЕНИЯ ГЕТЕРОГЕННЫХ ИОНИТОВЫХ МЕМБРАН | 0 |
|
SU170647A1 |
| ЭЛЕКТРОМИНИТРАКТОР | 1998 |
|
RU2138147C1 |
| Горный компас | 0 |
|
SU81A1 |
| ПЛАТОНОВ B.Ф | |||
| и др | |||
| Гусеничные и колесные транспортно-тяговые машины | |||
| - М.: Машиностроение, 1986, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |

