Изобретение относится к колесным и гусеничным транспортным средствам (ТС) с распределением мощности между передними и задними ведущими осями.
Конкретно – к многоосным многоприводным автомобилям (легковым и специальным повышенной проходимости, грузовым с приводом более, чем на одну ось), сочлененным колесным и гусеничным машинам с активными секциями; автопоездам с активным прицепным звеном; гусеничным машинам с четырьмя гусеничными обводами и одним корпусом. Модификации заявляемого механизма применимы, в принципе, и на легковых автомобилях и шасси колесных роботов экстремальной проходимости (и геометрической, и опорно-сцепной).
Для грузовых автомобилей и форвардеров характерна большая разница значений нормальных реакций под колесами ведущих мостов в снаряженном состоянии и при полной загрузке ТС. Колеса более нагруженных мостов могут передать больший крутящий момент по условию сцепления с грунтом, следовательно, возникает потребность в асимметричном распределении крутящего момента между ведущими осями. В трансмиссиях грузовых автомобилей эта задача решается установкой несимметричного дифференциала в раздаточной коробке [1. Андреев А.В., Ванцевич В.В., Лефаров А.Х. Дифференциалы колесных машин. – М.: Машиностроение, 1987. – 176 с. (с. 5-8, рис. 2). – URL: http://automobile.narod.ru/ Books/differential.pdf]. Типично решение, при котором на задние ведущие мосты трехосного грузовика направляется 2/3 крутящего момента, на передний мост – 1/3.
Такое решение отличается относительной простотой, надежностью, долговечностью узла, высоким КПД. Однако, несимметричный дифференциал не допускает регулирования соотношения передаваемых на оси моментов в зависимости от распределения нормальных реакций по осям.
В ряде эксплуатационных условий используют блокировку (самоблокировку) дифференциала посредством предусмотренной для этого фрикционной муфты [1, C. 96-97, рис. 74 Конструкция несимметричного самоблокирующегося дифференциала)] (или самоблокировку – например, в дифференциалах повышенного трения).
Значительную часть времени движения ТС находится в повороте в широком диапазоне изменения сопротивления движению. Кроме того, и при прямолинейном движении ТС неодинаковое сопротивление движению под левыми и правыми бортами (гусеницами или колесами) обусловливает неустойчивость заданного режима движения.
Устойчивость, управляемость, тягово-динамические характеристики, проходимость на местности современных ТС обеспечиваются установкой на их шасси механизмов распределения мощности (МРМ) между «бортами» - левым(и) и правым(и) ведущим(и) колесом(ми), которые во многих литературных источниках (в основном в отношении к гусеничным машинам) называют механизмами передачи и поворота (МПП) [2. Расчет и конструирование гусеничных машин / Н.А. Носов и др.; под ред. проф. Н.А. Носова. – Л.: Машиностроение, 1972. – 560 с. – Гл. IX «Механизмы поворота, С. 346-398.].
Одним из примеров МРМ (МПП) может служить МРМ, содержащий двухстепенную редукторную часть, входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например через полуоси, связаны с левым и правым ведущими колесами ТС, с планетарными зубчатыми рядами - ну-левым, первым и вторым, причем нулевой, непосредственно связанный с упомянутым входным звеном, - с функцией простого дифференциала, а также содержащий тормозные элементы с возможностью выборочного, управляемого тормозного воз-действия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, при этом редукторная часть выполнена с четырьмя цилиндрическими трехзвенными планетарными зубчатыми рядами, включая дополнительный редукторный, при этом входное ее звено непосредственно со-единено со звеньями двух планетарных рядов, а система управления тормозными элементами выполнена с возможностью широтно-импульсной модуляции давления (ШИМД) во фрикционных парах тормозных элементов [3. RU 2634062 C1, B60К 17/35, F16H 48/30, F16H 37/08, 23.10.2017].
В связи с упоминанием ШИМД, следует отметить, что в области транспортного машиностроения (в том числе в системах управления поворотом гусеничных машин с использованием фрикционных тормозных элементов) рассматриваются возможности реализации ШИМД [3. К методу оценки частоты импульсного управления поворотом гусеничной машины / Бойков А.В., Григорьев А.П., Русинов Р.В. // Рабочие процессы в компрессорах и установках с ДВС: межвузовский сборник. - Л.: Изд-во ЛПИ им. М.И. Калинина, 1987. - С. 73-78].
Интересен, под углом зрения заявляемого изобретения, МРМ в трансмиссии автомобиля, содержащий редукторную часть с двумя степенями свободы («двух-степенной редуктор»), входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например через полуоси, связаны с ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с входным звеном, является простым дифференциалом, тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, связанную с рулевым механизмом с возможностью поворота управляемых колес автомобиля [4. Dr. Claus Granzov. ZV Vector Drive - better driving dynamics and diving safety through Torque Vectoring // http://www.irs.kit.edu/download/131213_GC_TorqueVectoring_ ZF_Handout. pdf. 13.12.2013].
В нем редукторная часть выполнена с простым коническим дифференциалом и двумя, слева и справа от упомянутого конического дифференциала, одинаковыми цилиндрическими трехзвенными планетарными зубчатыми рядами со ступенчатыми сателлитами, при этом входное звено редукторной части (корпус конического дифференциала) соединено с зубчатым солнцем малой ступени указанного сателлита, большая ступень последнего соединена посредством другого зубчатого солнца с одной из полуосей и, далее, с одним из ведущих колес автомобиля, а водило - с дисковыми подвижными элементами тормоза.
Этот аналог позволяет реализовывать подводимую к ведущим колесам автомобиля мощность в соответствии с условиями движения.
Однако это МРМ «межколесный» - между левым и правым колесами после главной передачи и в таком виде неприемлем для использования в качестве межосевого распределителя мощности, главным образом из-за чрезмерных для этого массогабаритных показателей и сложности конструкции.
Наиболее близким аналогом заявляемого межосевого дифференциального МРМ (выбран за прототип) является межосевой дифференциальный механизм распределения мощности, содержащий входной вал, связанный с ведущим звеном блокируемого фрикционной муфтой дифференциала, выходные звенья которого связаны с выходными валами переднего и заднего мостов, причем одного из них – непосредственно, а второго – во взаимосвязи с дополнительной зубчатой передачей [5. Андреев А.В., Ванцевич В.В., Лефаров А.Х. Дифференциалы колесных машин. – М.: Машиностроение, 1987. – 176 с. (с. 33-35, рис. 19 «Схема дифференциального межосевого привода с ограниченным передаточным отношением»). – URL: http://automobile.narod.ru/Books/differential.pdf].
В прототипе дополнительная зубчатая передача выполнена в виде цилиндрических зубчатых передач внешнего зацепления с определенным передаточным отношением, обеспечивающим упомянутое распределение мощности между передней и задней осями ТС.
Однако при всех своих положительных качествах и востребованности, прототип обладает еще недостаточно высокими массогабаритными характеристиками и возможностями: несимметричный межосевой дифференциал не допускает регулирования соотношений передаваемых на оси крутящих моментов в зависимости от распределения нормальных реакций по осям ТС (вследствие изменения условий движения и загрузки ТС); применение же для этого известных «межколесных» МРМ крайне нецелесообразно по причинам относительной конструктивной сложности, неприемлемости массогабаритных показателей; он практически не адаптирован к разным ТС.
Задача заключается в устранении указанных недостатков прототипа (с учетом упомянутых аналогов из числа МРМ) и в улучшении технико-эксплуатационных (в приложении к шасси гражданских ТС) или тактико-технических характеристик (в приложении к шасси военных и специальных ТС) за счет относительно простого конструктивно и оригинального обеспечения возможности, в дополнение к прототипу, перераспределять, в достаточно широком диапазоне соотношения, крутящий момент между ведущими осями ТС, а также повышения компактности устройства, уменьшения его массы и габаритов, адаптации к разным ТС.
Решение поставленной задачи достигается тем, что в межосевом дифференциальном механизме распределения мощности, содержащем входной вал, связанный с ведущим звеном блокируемого фрикционной муфтой дифференциала, выходные звенья которого связаны с выходными валами переднего и заднего мостов, причем одного из них – непосредственно, а второго – во взаимосвязи с дополнительной зубчатой передачей, согласно изобретению, дополнительная зубчатая передача выполнена в виде трехзвенного планетарного ряда, солнечная шестерня которого связана с входным звеном дифференциала, водило – с выходным валом заднего моста, а эпицикл – с тормозным элементом управления.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- дифференциал может быть выполнен простым симметричным, причем цилиндрическим или коническим, с кинематическим параметром k0 = -1 (это позволяет получить наиболее простые схему и конструкцию, расширить возможности использовать широко распространенные симметричные дифференциалы в качестве базового узла устройства механизма, с учетом того, что режим простого симметричного дифференциала выгоден при снаряженной массе ТС);
- при предыдущей совокупности существенных признаков, блокирующая муфта может связывать выходной вал переднего моста с водилом дифференциала (это дает дополнительные компоновочные преимущества);
- дифференциал может быть выполнен в виде трехзвенного планетарного ряда, ведущим звеном которого служит эпицикл, а выходными звеньями – соответственно водило в соединении с выходным валом переднего моста и солнечная шестерня в соединении с выходным валом заднего моста, с кинематическим пара-метром k0 = +2 (это позволяет, в качестве эквивалентной замены базового узла механизма, сохранить описанные выше преимущества простого симметричного дифференциала и расширяет возможности унификации, расширить спектр ТС для реализации проекта);
- при предыдущей совокупности существенных признаков, блокирующая муфта может связывать выходной вал переднего моста с эпициклом упомянутого трехзвенного планетарного ряда с функцией дифференциала (это дает дополнительные компоновочные преимущества).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Заявляемое устройство межосевого дифференциального МРМ в трансмиссии ТС пояснено на чертежах:
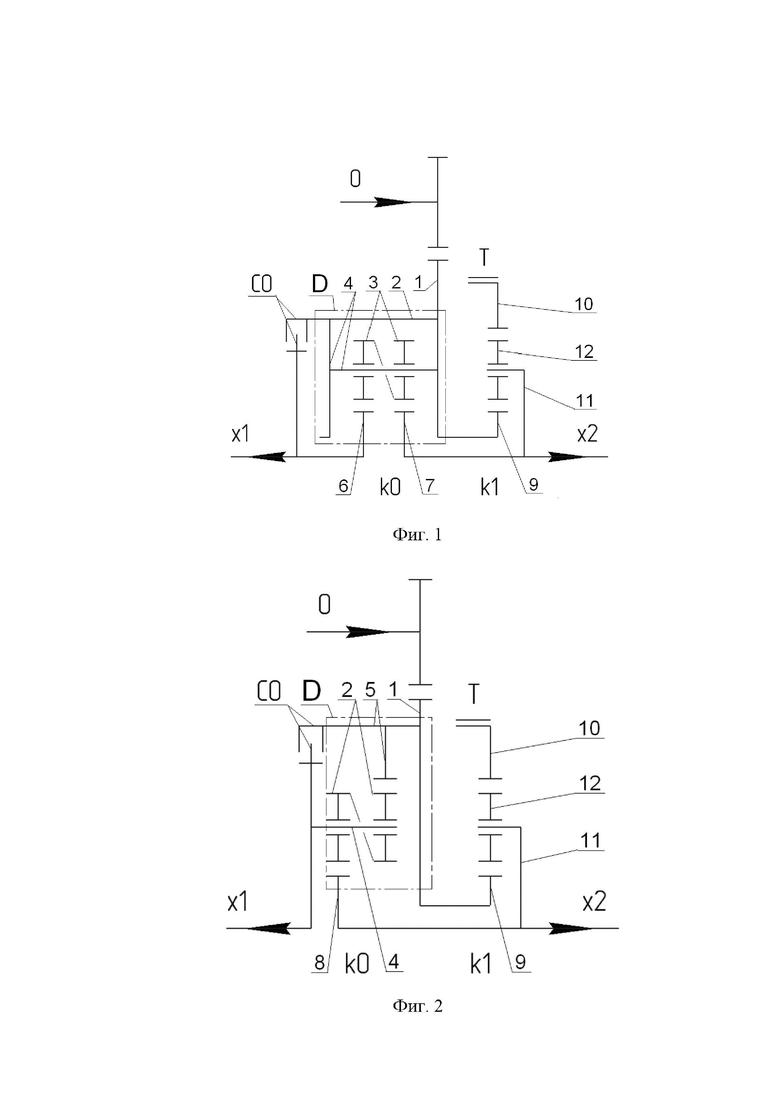
на фиг. 1 показана упрощенная кинематическая схема первого (по порядку и по авторскому рейтингу) примера (частного случая) межосевого МРМ (МРМ-1) – на основе простого дифференциала, где 0 – входной («нулевой») вал; x1 и x2 – передний (к передней оси ТС) и задний (к задней оси ТС) выходные валы механизма; Д – дифференциал; Т - тормоз (фрикционный элемент управления); C0 – дисковая фрикционная блокирующая муфта (фрикционная муфта сцепления); k0 - кинематический параметр (внутреннее передаточное отношение) «k» простого симметричного дифференциала в основе механизма; k1 - кинематический параметр (внутреннее передаточное отношение) «k» дополнительного планетарного ряда;
на фиг. 2 – упрощенная кинематическая схема второго (по порядку и по авторскому рейтингу) примера (частного случая) межосевого МРМ (МРМ-2) – на основе планетарного ряда, где обозначения аналогичны фиг. 1, при этом Д – планетарный ряд с функцией дифференциала; k0 - кинематический параметр (внутреннее передаточное отношение) «k» планетарного ряда («основного») с функцией простого симметричного дифференциала в основе механизма.
На фигурах 1 и 2, кроме того, обозначены позициями:
1 – ведущее звено дифференциала (см. фиг. 1) или «основного» планетарного ряда с функцией дифференциала (см. фиг. 2); 2 – сдвоенные сателлиты в составе дифференциала (см. фиг. 1) или «основного» планетарного ряда с функцией дифференциала (см. фиг. 2); 3 – коробка (водило) простого симметричного дифференциала; 4 – водило - ось сателлитов 2 (элементы 2 и 3 жестко соединены); 5 – эпи-цикл «основного» планетарного ряда с функцией дифференциала; 6, 7, 8 – солнечные шестерни дифференциала (см. фиг. 1) или «основного» планетарного ряда с функцией дифференциала (см. фиг. 2); 9, 10, 11 и 12 – солнечная шестерня, эпи-цикл, водило и сателлит(ы) дополнительного планетарного ряда механизма.
Межосевой дифференциальный механизм распределения мощности содержит входной вал 0, связанный с ведущим звеном 1 блокируемого фрикционной муфтой C0 дифференциала Д (или его функционального аналога Д). Выходные звенья дифференциала (или упомянутого аналога) Д связаны с выходными валами x1 и x2 переднего и заднего мостов (в общем случае - передней и задней осей), причем одного из них – непосредственно, а второго – во взаимосвязи с дополнительной зубчатой передачей.
Дополнительная зубчатая передача (на фиг. 1 и 2 – справа) выполнена в виде трехзвенного планетарного ряда, солнечная шестерня 9 которого связана с входным звеном 1 дифференциала, водило 11 – с выходным валом x2 заднего моста, а эпицикл 10 – с тормозным элементом управления Т.
Согласно первому частному примеру (см. фиг. 1), дифференциал Д выполнен простым симметричным, причем цилиндрическим или коническим (показан цилиндрический), с кинематическим параметром (внутренним передаточным отношением) k0 = -1.
При этом с выходными валами x1 и x2 связаны, соответственно, солнечные шестерни 6 и 7, а блокирующая муфта C0 связывает, предпочтительно, выходной вал x1 переднего моста с водилом 4 дифференциала Д.
Согласно второму частному примеру (см. фиг. 2), дифференциал Д выполнен в виде трехзвенного планетарного ряда («основного», поскольку ранее введено понятие «дополнительный» трехзвенный планетарный ряд), ведущим звеном которого служит эпицикл 5, а выходными звеньями – соответственно водило в соединении с выходным валом x1 переднего моста и солнечная шестерня 8 в соединении с выходным валом x2 заднего моста, с кинематическим параметром (внутренним передаточным отношением) k0 = +2.
При этом, предпочтительно, блокирующая муфта C0 связывает выходной вал x1 переднего моста с эпициклом 5 упомянутого трехзвенного планетарного ряда Д с функцией дифференциала.
Для контроля за работой механизма, на выходных его звеньях устанавливают датчики частоты вращения (например, датчики Холла или датчики индукционные) – не показаны.
Возможны другие кинематические схемы и конструкции в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Устройство по принципам функционирования близко к межколесным управляемым механизмам распределения мощности (МРМ) и работает следующим образом.
При работающем двигателе ТС его мощность поступает на входной вал 0.
При отключенном тормозе Т механизм работает, как простой симметричный дифференциал, что выгодно при снаряженной массе ТС. При полном включении тормоза Т на звене x2 складываются моменты М от полуоси дифференциала Д и дополнительного планетарного механизма 9-12:
Mx2 = (0,5 – k1)·M0.
Значение k1∈[-1,4; -4,5], что позволяет охватить широкий диапазон передаточных отношений.
Соотношение угловых скоростей выходных звеньев механизма определяется уравнением Виллиса для симметричного дифференциала:
ωx1 + ωx2 = 2·M0.
Поскольку элемент управления (тормоз) Т можно выполнить в виде дисковой фрикционной муфты, а технология контроля буксования для таких элементов управления в России успешно апробирована для гусеничных машин (см., например, работу [6. Замкнутые системы управления поворотом гусеничных машин / Галышев Ю.В., Григорьев А.П., Добрецов Р.Ю., Лозин А.В. // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. 2014. № 3 (202). С. 201-208.]), контролируемое буксование Т даст возможность управлять значением крутящего момента на звене х2, например, в зависимости от нормальной нагрузки на мосты, связанные со звеном х2.
Управление может быть цифровым (для чего потребуется создать систему управления, поддерживающую технологию CAN), или строиться по аналогии с механической системой управления регулятором давления тормозных цилиндров колес задней оси.
При управляемом буксовании элемента Т неизбежны потери, связанные с трением в буксующем пакете дисков. Известны методики расчета, позволяющие оценить мощность буксования в подобной ситуации (см., например, работы [7. Шеломов В.Б., Добрецов Р.Ю. Мощности двигателя и буксования фрикционного элемента управления поворотом гусеничной машины // Научно-технические ведомости СПбГПУ, серия «Наука и образование». – 2010. – № 2, т. 2 – С. 87-91.], [8. Дидиков Р.А. Метод определения составляющих баланса мощности механизма распределения мощности в трансмиссии автомобиля // Вестник СибАДИ. – 2016 – №4(50). – С. 61-63]).
Поскольку управляемое буксование также негативно скажется на ресурсе пакета дисков, представляется целесообразным использовать предлагаемый механизм в режиме включен/выключен, что не исключает создания механизмов с плавной регулировкой выходного крутящего момента для машин, используемых в специфических условиях эксплуатации.
При использовании системы управления с широтно-импульсной модуляцией - ШИМ (ШИМД), контроль буксования включенного тормоза Т плавно изменяет передаваемый момент (назовем это «тонким» или «доводочным» управлением в отличие от «грубого»). Иначе говоря, объектом управления является тормоз T, причем с дифференцированно изменяемыми усилием и скважностью его срабатывания.
Устройство позволяет реализовывать ШИМ (ШИМД) и, следовательно, «тонко» управлять буксованием дисков тормоза Т и за счет этого получать оптимальное в данных эксплуатационных условиях передаточное отношение, а значит - нужное распределение крутящих моментов по осям ТС.
На основании изложенного в описании, можно резюмировать, что заявляемое устройство, независимо от выбора того или иного частного варианта схемы и конструкции, позволяет устранить отмеченные выше недостатки прототипа и улучшить технико-эксплуатационные (в приложении к колесным шасси гражданских ТС) или тактико-технические характеристики (в приложении к колесным шасси военных и специальных ТС) за счет:
- относительно простого конструктивно и оригинального обеспечения возможности перераспределять, в достаточно широком диапазоне соотношения, крутящий момент между ведущими осями ТС;
- повышения компактности устройства, уменьшения его массы и габаритов;
- адаптации механизма к разным ТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Механизм распределения мощности в трансмиссии автомобиля | 2014 |
|
RU2618830C2 |
| Четырехгусеничное шасси | 2022 |
|
RU2798151C1 |
| Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач | 2022 |
|
RU2794081C1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091250C1 |
Изобретение относится к колесным и гусеничным транспортным средствам (ТС) с распределением мощности между передними и задними ведущими осями. Межосевой дифференциальный механизм распределения мощности содержит входной вал, связанный с ведущим звеном блокируемого фрикционной муфтой дифференциала, выходные звенья которого связаны с выходными валами переднего и заднего мостов, причем одного из них – непосредственно, а второго – во взаимосвязи с дополнительной зубчатой передачей. Последняя передача выполнена в виде трехзвенного планетарного ряда, солнечная шестерня которого связана с входным звеном дифференциала, водило – с выходным валом заднего моста, а эпицикл – с тормозом. Достигается повышение технико-эксплуатационных или тактико-технических характеристик. 4 з.п. ф-лы, 2 ил.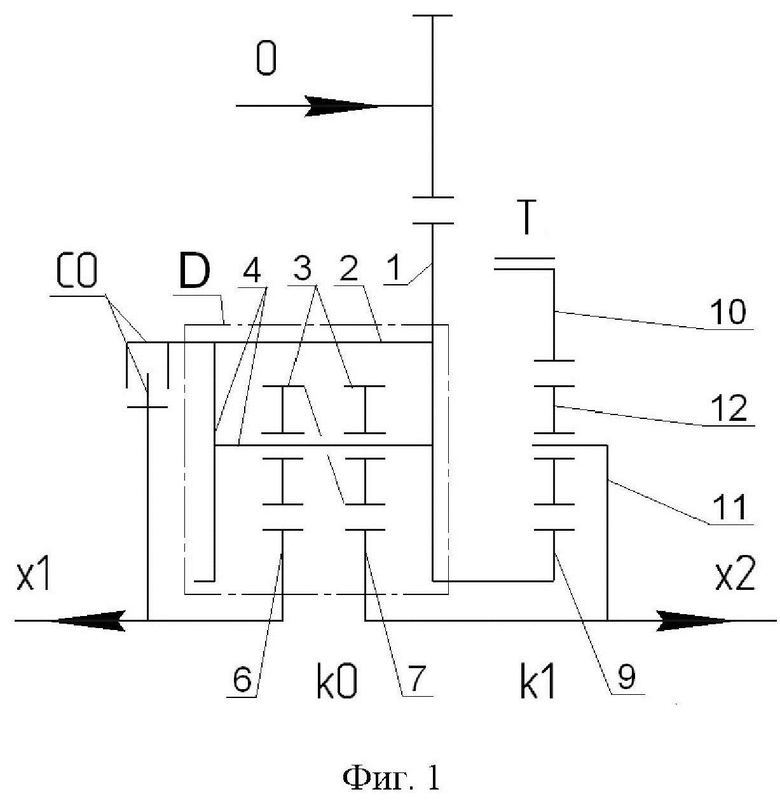
1. Межосевой дифференциальный механизм распределения мощности, содержащий входной вал, связанный с ведущим звеном блокируемого фрикционной муфтой дифференциала, выходные звенья которого связаны с выходными валами переднего и заднего мостов, причем одного из них – непосредственно, а второго – во взаимосвязи с дополнительной зубчатой передачей, отличающийся тем, что дополнительная зубчатая передача выполнена в виде трехзвенного планетарного ряда, солнечная шестерня которого связана с входным звеном дифференциала, водило – с выходным валом заднего моста, а эпицикл – с тормозным элементом управления.
2. Механизм по п. 1, отличающийся тем, что дифференциал выполнен простым симметричным, причем цилиндрическим или коническим, с кинематическим параметром k0 = -1.
3. Механизм по п. 2, отличающийся тем, что блокирующая муфта связывает выходной вал переднего моста с водилом дифференциала.
4. Механизм по п. 1, отличающийся тем, что дифференциал выполнен в виде трехзвенного планетарного ряда, ведущим звеном которого служит эпицикл, а выходными звеньями – соответственно водило в соединении с выходным валом переднего моста и солнечная шестерня в соединении с выходным валом заднего моста, с кинематическим параметром k0 = +2.
5. Механизм по п. 4, отличающийся тем, что блокирующая муфта связывает выходной вал переднего моста с эпициклом упомянутого трехзвенного планетарного ряда с функцией дифференциала.
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
| Механизм распределения мощности в трансмиссии автомобиля | 2014 |
|
RU2618830C2 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| US 6056660 A1, 02.05.2000. | |||

