Изобретение относится к строительству и может быть применено для подъема и выравнивания многоэтажных зданий и различных сооружений, получивших сверхнормативные крены, в частности, из-за осадки грунтов.
Известны различные системы подъема и выравнивания многоэтажных зданий и сооружений. Например, известна система подъема и выравнивания здания, сооружения, представляющая собой собственно устройство для подъема и выравнивания положения здания, сооружения при неравномерных осадках основания (описание изобретения к авторскому свидетельству СССР №1590512, 15.06.90, МПК 7 Е 02 D 35/00. “Устройство для выравнивания положения сооружений”). Данная система подъема и выравнивания здания, сооружения включает гидравлические домкраты, установленные между фундаментом и цокольной частью здания, сооружения. Гидравлические домкраты объединены между собой общей гидросистемой. Гидросистема имеет насосную станцию, работа которой может быть осуществлена с помощью электродвигателя. Система-аналог включает также емкость для рабочей гидравлической жидкости, запорные вентили. Но эта система-аналог имеет основной недостаток - это ненадежность ее работы. Кроме того, при применении описанной системы на практике затрачивается большое количество времени на весь процесс выравнивания здания, сооружения.
Известна также система подъема и выравнивания здания, сооружения (описание изобретения к авторскому свидетельству СССР №1818418, 27.09.89, МПК 7 Е 02 D 35/00. “Устройство для регулирования положения сооружений”). Данная система частично исключила недостаток предыдущего аналога. Кроме того, при применении данной системы сокращается время выравнивания здания, сооружения за счет частичной ее автоматизации. Данная система содержит гидравлические домкраты, программное устройство, каналы управления гидравлическими домкратами, регулирующий орган подачи питания. Вместе с тем, данная система-аналог снабжена блоком включения, блоком общей защиты, переключателем, блоком датчиков контроля положения сооружения и блоком индикации каналов управления и сигнализации. Причем блок датчиков контроля положения здания, сооружения подключен через переключатель к блоку сигнализации, к первому входу блока общей защиты и первому входу программного устройства, соединенного с исполнительным механизмом регулирующего органа подачи питания. Регулирующий орган подачи питания соединен с каналами управления гидравлических домкратов и со вторым входом блока общей защиты, выход которого подключен ко второму входу программного устройства, выходы которого соединены с входами каналов управления гидравлических домкратов. Выходы гидравлических домкратов соединены с остальными входами блока защиты и программного блока, выход которого подключен ко входу блока включения. Но все же описанная система-аналог недостаточно надежна в работе. Проявляется это прежде всего в моменты, когда происходит так называемое “задавливание” домкратом фундамента или же происходит разрушение “наддомкратного” опорного участка. В результате чего неизбежна авария.
Наиболее близкой по совокупности существенных признаков к заявляемому изобретению (прототипом) является система подъема и выравнивания здания, сооружения, приведенная в описании изобретения к патенту РФ №2090703, МПК 6 Е 02 D 35/00 под названием “Способ и устройство для непрерывного подъема и выравнивания здания, сооружения.” Описанная система-прототип подъема здания, сооружения содержит грузоподъемные устройства, узлы управления, ограничители хода, указатели линейного перемещения здания, насосную станцию и центральное устройство управления. Грузоподъемное устройство системы-прототипа содержит плоские домкраты, опорные вкладыши со стержнями, гидроопору. Узел управления системы-прототипа содержит гидрораспределитель с электромагнитами, другой гидрораспределитель тоже с электромагнитами, реле давления, гидрозамок, запирающий рабочую жидкость в полостях плоских домкратов во время остановок. Гидравлические элементы узла связаны между собой гидравлическими коммуникациями. Выходы контактной группы ограничителя хода соединены с электромагнитом гидрораспределителя, работа которого обеспечивает подачу рабочей жидкости в плоские домкраты.
Выходы контактов реле давления связаны с электромагнитом гидрораспределителя и с другим электромагнитом гидрораспределителя, обеспечивающих подачу рабочей жидкости в полость гидроопоры с одновременным сливом из штоковых полостей гидроцилиндров и плоских домкратов. Гидроопора состоит из корпуса с входным отверстием, уплотнительным кольцом и цилиндрическими гнездами гидроцилиндров, в которые входят поршни-штоки, из полого плунжера с коммутирующей коробкой и выходным отверстием. Кроме того, в корпусе установлены скользящие шпонки, входящие в пазы плунжера, в нижней кромке которого выполнены окна. Гидроцилиндры снабжены стопорными кольцами и скользящими шпонками. Насосная станция состоит из маслоблока, насоса с электроприводом, датчиков давления, распределительной и управляющей аппаратуры, контрольных манометров с кранами-демпферами и служит для подачи рабочей гидравлической жидкости в систему гидравлических коммуникаций, состоящую из рукавов высокого давления и коммутирующих устройств. Центральное устройство управления, анализируя показания датчиков давления и указателей линейных перемещений здания, сооружения, инициирует работу насосной станции и узлов давления и, как вариант реализации, выполнено в виде пульта управления (с оператором).
Но описанная система-прототип подъема и выравнивания здания, сооружения имеет следующий крупный недостаток, который состоит в следующем. На практике при подъеме и выравнивании здания, сооружения часто наблюдается “задавливание” домкратом фундамента здания, сооружения или же происходит разрушение “наддомкратного” опорного участка. Но датчики перемещения фиксируют этот факт как перемещение самого здания, сооружения, то есть происходит несоответствие показаний датчиков перемещения реальным перемещениям здания, сооружения. Это на практике приводит к аварийным ситуациям. Другими словами, описанная система-прототип подъема и выравнивания здания, сооружения является недостаточно надежной системой.
Задача, которую поставили перед собой разработчики новой системы подъема и выравнивания здания, сооружения, состояла в создании такой системы, которая была бы более надежной в работе, упростила бы технологический процесс подъема и выравнивания здания, сооружения, а также дала бы более качественные показатели выравниваемого здания, сооружения по сравнению с существующими системами этого назначения. Техническим результатом, достигнутым в процессе решения поставленной перед разработчиками задачи, явилось предотвращение несоответствия показаний датчиков перемещений реальным перемещениям самого здания, сооружения, которые, как правило, происходят при “задавливании” домкратного модуля фундамента здания, сооружения или при разрушении “наддомкратного” опорного участка.
Сущность изобретения состоит в том, что в системе подъема и выравнивания здания, сооружения, включающей силовой блок, содержащий насосную станцию, электродвигатель, емкость для рабочей гидравлической жидкости, электрогидравлический модуль, обеспечивающий общую подачу рабочей жидкости к исполнительным элементам для подъема и выравнивания, исполнительно-регистрирующий блок, содержащий исполнительные элементы для подъема и выравнивания, электрогидроклапаны, датчики перемещения и блок управления, она дополнительно включает блок обратной связи, содержащий дистанционно отслеживающее устройство геометрического положения здания в пространстве, а также изменение его геометрической формы и передающее устройство, с возможностью отправки собранной информации в блок управления и корректировки управляющих команд на подъем здания, сооружения в реальном режиме времени, а исполнительно-регистрирующий блок дополнительно содержит датчики давления плоских гидравлических домкратов, причем блок управления выполнен в виде электронного информационно-вычислительного комплекса, снабженного управляющей программой с возможностью осуществления сбора информации с датчиков перемещения и давления, а также блока обратной связи, обработки этой информации и выдачи управляющих команд на электрогидроклапаны для проведения непрерывного цикла подъема в автоматическом режиме.
Вместе с тем, сущность изобретения состоит и в том, что в системе для подъема и выравнивания здания, сооружения дистанционно отслеживающее устройство представляет собой геодезически привязаные к реперу электронные тахеометры с возможностью снятия показаний о текущем геометрическом положении и форме здания, сооружения с отражателей, установленных на здании, сооружении, и передающие собранную информацию в блок управления для корректировки управляющих команд в реальном режиме времени.
Сущность изобретения состоит и в том, что в системе для подъема и выравнивания здания, сооружения дистанционно отслеживающее устройство представляет собой геодезически привязанные к реперу два электронных тахеометра с возможностью снятия показаний о текущем геометрическом положении и форме здания, сооружения с отражателей, установленных на здании, сооружении, и передающие собранную информацию в блок управления для корректировки управляющих команд в реальном режиме времени.
Сущность изобретения состоит и в том, что дистанционно отслеживающее устройство представляет собой геодезически привязанный к реперу электронный сканер с возможностью снятия показаний о текущем геометрическом положении и форме здания, сооружения с отражателей, установленных на здании, сооружении, и передающие собранную информацию в блок управления для корректировки управляющих команд в реальном режиме времени.
Сущность изобретения состоит и в том, что передающее устройство выполнено в виде кабеля связи, содержащего один или несколько изолированных проводников, заключенных в защитную оболочку.
Сущность изобретения состоит и в том, что передающее устройство выполнено в виде устройства инфракрасной (ИК) беспроводной связи и передающего информацию на ИК-порт.
Сущность изобретения состоит и в том, что передающее устройство выполнено в виде радиопередатчика, отправляющего информацию на радиоприемное устройство блока управления.
Сущность изобретения состоит также в том, что исполнительные элементы для подъема и выравнивания здания, сооружения системы подъема и выравнивания здания, сооружения выполнены в виде поршневых гидравлических домкратов, установленных в проемах здания, сооружения.
Вместе с тем, сущность изобретения состоит в том, что исполнительные элементы для подъема и выравнивания здания, сооружения выполнены в виде плоских гидравлических домкратов.
Сущность изобретения состоит и в том, что плоские гидравлические домкраты выполнены в виде нескольких плоских гидравлических модулей.
Сущность изобретения состоит и в том, что плоские гидравлические домкраты выполнены в виде двух плоских домкратных модулей.
Сущность изобретения состоит и в том, что в центре круга домкратного модуля по обе его стороны смонтированы бобышки, причем отношение диаметра (D) домкратного модуля к диаметру (F) бобышки составляет 23,5...25,6 при отношении диаметра (F) бобышки к его толщине (f) 1,9...2,2.
Вместе с тем, сущность изобретения состоит в том, что домкратный модуль содержит жестко и герметично прикрепленное с полой его стороны по периметру тора предохранительное кольцо, причем отношение толщины (d) торообразной части домкратного модуля к высоте кольца (h) составляет 2,5...3,2 при отношении диаметра (D) полого модуля к толщине его плоской части (1) 48,6...50,3.
И наконец, сущность изобретения состоит в том, что электрогидравлический модуль, обеспечивающий общую подачу рабочей жидкости к исполнительным элементам для подъема и выравнивания, представляет собой совокупность гидравлических элементов, обеспечивающих подачу рабочей жидкости к исполнительным элементам, регулировку ее расхода, давления, отключение подачи в рабочем и аварийном режимах, возможность переключения насосной станции, контроль за состоянием гидравлических параметров.
В качестве примера изобретения приведена система подъема и выравнивания здания, сооружения, которая поясняется чертежами, где
на фиг.1 схематически изображена система для подъема и выравнивания здания, сооружения;
на фиг.2 - силовой блок, входящий в систему;
на фиг.3 - исполнительно-регистрирующий блок, входящий в систему;
на фиг.4 - блок управления системой;
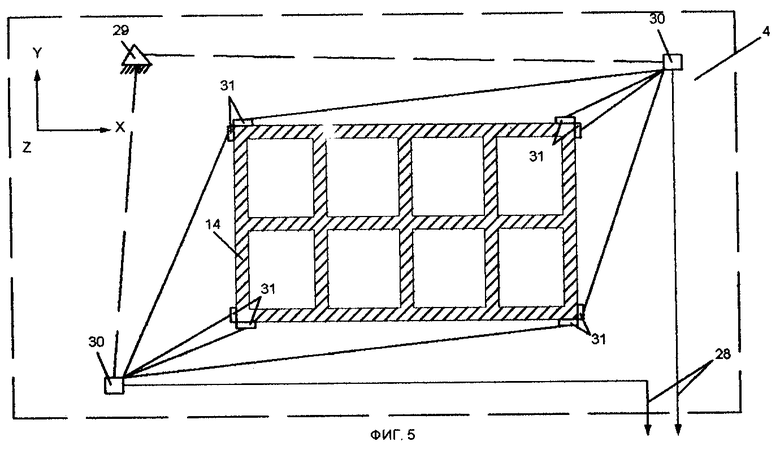
на фиг.5 - блок обратной связи;
на фиг.6 - плоский домкратный модуль в сжатом состоянии, входящий в систему;
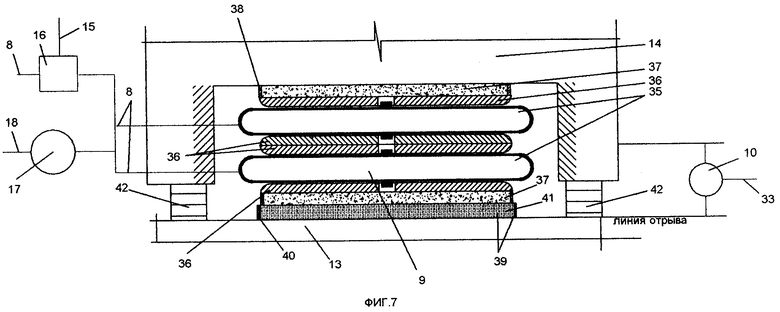
на фиг.7 - плоский домкратный модуль в раздутом состоянии, входящий в систему.
На фиг.8 - разрез домкратного модуля плоского гидравлического домкрата с соотношениями размеров.
В систему для подъема и выравнивания здания, сооружения входит силовой блок 1, исполнительно-регистрирующий блок 2, блок управления 3 и блок обратной связи 4.
Силовой блок 1 состоит из насосной станции 5, которая соединена с емкостью 6 для рабочей жидкости, в частности масла. Насосная станция 5 через электрогидравлический модуль 7 по подающей рабочую гидравлическую жидкость магистрали 8 соединена с плоскими гидравлическими домкратами 9, которые входят в состав исполнительно- регистрирующего блока 2. В исполнительно-регистрирующем блоке 2 привязанными к домкратам смонтированы датчики перемещения 10. Вместе с тем, насосная станция 5 и электрогидравлический модуль 7 смонтированы с возможностью управления с блока управления 3 посредством кабелей 11 и 12.
В состав исполнительно-регистрирующего блока 2 входят плоские гидравлические домкраты 9, установленные в домкратные проемы между фундаментом 13 здания, сооружения и собственно поднимаемым зданием, сооружением 14. Плоские гидравлические домкраты 9 с помощью подающей рабочую гидравлическую жидкость магистрали 8 функционально связаны управляющими кабелями 15 с электрогидроклапанами 16. Подающая рабочую гидравлическую жидкость магистраль 8 соединена через электрогидроклапан 16 и датчик давления 17 с плоским гидравлическим домкратом 9. Регистрирующий кабель 18 соединен с датчиком давления 17, а управляющий кабель 15 соединен с электрогидроклапаном 16.
В блок управления 3 входят аналоговые мультиплексоры 19, которые с помощью регистрирующих кабелей 18 функционально связаны с датчиками давлений 17. Кроме того, в блок управления 3 входит аналого-цифровой преобразователь информации 20, модуль управления комплексом 21, микроЭВМ 22, пульт ручного управления 23, контроллер клавиатуры и интерфейса 24, дешифратор 25, силовой модуль 26. В блок управления 3 также входят модуль управления приводами 27 и управляющие кабели 15, предназначенные для насосной станции 5 и электрогидравлического модуля 7, которые находятся в силовом блоке 1.
Блок обратной связи 4 состоит из репера 29, к которому геодезически привязаны электронные тахеометры 30. Электронных тахеометров в данном примере два, но он может быть и один. Электронные тахеометры предназначены для снятия показаний с отражателей 31, которые установлены на здании 14, с возможностью передачи информации по кабелям 28 в блок управления 3.
Необходимо отметить, что насосная станция 5, входящая в силовой блок 1, соединена с электродвигателем 32, а датчики перемещения 10 функционально связаны кабелями 33 с аналоговыми мультиплексорами 19 блока управления 3. Кроме того, в блок обратной связи 3 входит электронный ключ 34. Плоские гидравлические домкраты 9, входящие в систему подъема и выравнивания здания, сооружения, состоят из плоских гидравлических модулей 35. Плоские гидравлические модули 35 выполнены полыми с торообразным в сечении выступом по его периметру. В данном случае торообразный в сечении выступ выполняет роль сильфона, то есть гофрированной металлической оболочки, которая меняет свой геометрический объем за счет изменения радиусов кривизны гофров. Количество домкратных модулей в данном оптимальном случае два, но может быть и один, а также больше двух. В этом случае необходимо учитывать следующее обстоятельство. Поскольку круглый плоский полый домкратный модуль работает по принципу “шаровой опоры”, то при плоско-параллельном подъеме оболочки модулей 9 перемещаются вертикально относительно друг друга, сохраняя параллельность. Но при повороте поднимаемого объекта относительно какой-либо оси оболочки модулей становятся непараллельными, повторяя положение поднимаемой и опорной плоскостей. В этом случае угол между оболочками модулей равен углу устраненного крена выравниваемого объекта (принцип подобия треугольников). С каждой стороны круглого плоского полого гидравлического домкратного модуля 35 смонтированы деревянные домкратные фасонные прокладки 36, прилегающие к домкратным модулям и копирующие их форму. К каждой фасонной прокладке 36 в нижней и верхней опорных частях устройства прилегает деревянная нефасонная прокладка 37, которая выполнена с кольцом-обручем 38. Нефасонная прокладка 37 может быть выполнена и металлической, в частности, из дюралюминия. Ниже пакета домкратных модулей с прокладками установлена рамная песочница 39. Рамная песочница 39 состоит из рамы 40, которая заполнена сыпучим материалом 41, в частности песком. К каждому плоскому гидравлическому домкратному модулю 35 прикреплены штуцер для подачи жидкой рабочей среды, в частности масла, и сливной штуцер для его слива. Гидравлический домкратный модуль включает также домкратные клинья 42. Плоские оболочки домкратного модуля 35 соединены друг с другом герметично, например, с помощью сварки и представляют собой единую целую оболочку. В полой части каждого домкратного модуля жестко и герметично прикреплено предохранительное кольцо. Предохранительное кольцо может, в частности, быть присоединено к оболочке домкратного модуля с помощью сварки.
Лабораторно-экспериментальными исследованиями установлено, что оптимальное отношение толщины (d) торообразной части домкратного модуля к высоте (h) его предохранительного кольца составляет 2,5...3,2 при отношении диаметра (D) домкратного модуля к толщине его плоской части (1) 48,6...50,3. Посредине каждого круглого полого домкратного модуля с каждой его стороны смонтированы бобышки, предназначенные для центровки всего устройства. Лабораторно-экспериментальными исследованиями установлено также, что оптимальное отношение диаметра (D) домкратного модуля к диаметру (F) бобышки составляет 23,5...25,6 при отношении диаметра (F) бобышки к его толщине (f) 1,9...2,2. Плоские гидравлические домкраты 9 помещены в домкратный проем здания, сооружения 14 и установлены на его фундаментную часть 13. Верхней своей частью плоские гидравлические домкраты 9 упираются в цокольную панель здания, сооружения 14.
МикроЭВМ 22 управляющего устройства 3 функционально связана с ПЭВМ 43, в которой заложена управляющая программа.
Работает вышеописанная система подъема и выравнивания здания, сооружения следующим образом. В базу данных управляющей программы ПЭВМ 43 закладывают полную геометрическую модель выравниваемого здания, сооружения 14 как в текущем положении, так и в проектном. Кроме этого, в системе координат XY закладывают координаты расположенных в проемах под зданием, сооружением 14 плоских гидравлических домкратов 9 и порядок их работы в соответствии с заранее проведенными расчетами.
По команде оператора с ПЭВМ 43 производят включение насосной станции 5 и подачу давления рабочей гидравлической жидкости через электрогидравлический модуль 7 к электрогидроклапанам 16, управляемым по алгоритму управляющей программы. Рабочая гидравлическая жидкость по подающей магистрали 8 поступает через электрогидроклапаны 16 и датчики давления 17 ко всем домкратам 9. Согласно управляющей программе, заложенной в ПЭВМ 43 с помощью модуля управления комплексом 21, постоянно опрашивают все датчики 10 и 17. Кроме того, с помощью модуля управления комплексом 21 производят управление аналого-цифровым преобразованием информации, полученной от датчиков 10 и 17, и полученные цифровые данные передают в ПЭВМ 43. Все датчики 10 и 17, а также электронные тахеометры 30 подключены ко входам аналогового мультиплексора 19 посредством кабелей 18, 28 и 33. Согласно управляющей программе, заложенной в ПЭВМ 43 с помощью модуля управления комплексом 21, последовательно опрашивают каждый вход аналогового мультиплексора 19. Затем полученную аналоговую информацию с каждого входа аналогового мультиплексора 19 также последовательно подают на вход аналого-цифрового преобразователя 24. После этого с помощью аналого-цифрового преобразователя 24 преобразуют аналоговую информацию в цифровую и передают ее в модуль управления комплексом 21. С помощью модуля управления комплексом 21 собирают данные от всех датчиков 10 и 17 и передают эти данные в управляющую микроЭВМ 22. Затем на основании полученных данных с помощью микроЭВМ 22 формируют управляющую информацию и передают ее назад в модуль управления комплексом 21. После этого эту управляющую информацию через контроллер клавиатуры и интерфейса 24, а также через модуль управления приводами 27 передают каждому электронному ключу 34. Необходимо отметить, что модуль управления приводами 27 получает питание от силового стабилизированного модуля 26. Каждый электронный ключ 34 через кабели 15 управляет своим электрогидроклапаном 16 плоского гидравлического домкрата 9. Выбор электронных ключей 34, которые, открываясь, коммутируют ток, предназначенный для управления электрогидроклапанами 16, осуществляют с помощью дешифратора 25.
В процессе подъема и выравнивания здания, сооружения 14 с помощью электронных тахеометров 30, которые функционально связаны с репером 29, отражателями 31, установленными в заранее определенных точках здания 14, отслеживают изменение его геометрического положения и передают информацию по кабелям 28 на вход аналогового мультиплексора 19. Далее, управляющей программой, заложенной в ПЭВМ 43, с помощью микроЭВМ 22 постоянно сверяют заложенные тестовые геометрические модели с полученными от электронных тахеометров 30 и, при необходимости, производят корректировку процесса подъема.
При подъеме и выравнивании здания, сооружения 14 работу гидравлического домкрата 9 осуществляют путем подачи и спуска гидравлической жидкости, в частности масла, в каждый полый домкратный модуль 35. Под действием масла каждый полый домкратный модуль 35 передает усилие через фасонные 36 и остальные 38 прокладки, а также рамную песочницу 41 на фундамент 13 и цокольную панель здания, сооружения 14, таким образом приподнимая его в заданном управляющей программой месте. Во время раздутия каждого домкратного модуля 35 происходит увеличение в вертикальном направлении самого модуля на величину подъема. Соосность домкратного модуля обеспечена с помощью бобышек, смонтированных посредине каждого домкратного модуля. Как следствие вышесказанного, будет обеспечена четкость работы гидравлических домкратов без скольжения домкратных модулей относительно друг друга. Таким образом, при применении данной системы подъема и выравнивания здания, сооружения будет обеспечена наибольшая надежность работы как самой системы, так и собственно плоских гидравлических домкратов 9 при подъеме и выравнивании здания, сооружения 14. Другими словами, на сегодняшний день наиболее оптимальными исполнительными устройствами в комплексе с системой подъема и выравнивания здания, сооружения 14 являются плоские гидравлические домкраты 9 с двумя домкратными модулями 35. Необходимо также отметить, что в данном случае ресурс работы плоских гидравлических домкратов 9 будет максимальным. Предохранительное кольцо, жестко и герметично прикрепленное с полой стороны домкратного модуля 35, составляющего плоский гидравлический домкрат 9, ужесточает его, позволяя увеличить число циклов раздутия-сжатия модуля почти в три раза, как показали это лабораторно-экспериментальные исследования. В то же самое время определенное лабораторно-экспериментальным путем соотношение размеров кольца и домкратного модуля позволяют торообразному выступу выполнять функцию сильфона. Выше пределов указанных соотношений предохранительного кольца и домкратного модуля плоского гидравлического домкрата функции сильфона домкратный модуль выполнять не будет, а ниже этих пределов не будет наблюдаться эффект увеличения количества циклов раздутия-сжатия. Вместе с тем, благодаря бобышкам, смонтированным посредине круглого плоского модуля, не будет происходить сползания домкратных модулей относительно друг друга.
Но самое главное - это то, что описанная система подъема и выравнивания здания, сооружения благодаря обратной связи позволяет исключить несоответствие показаний датчиков перемещений реальным перемещениям здания, сооружения, которые могут иметь место в других системах аналогичного назначения. Все это связано с тем, что на практике часто происходит “задавливание” домкратом фундамента или же происходит разрушение “наддомкратного” опорного участка. В результате чего такая ситуация приводит к аварии. Поэтому применение описанной системы подъема и выравнивания здания, сооружения в народном хозяйстве позволит решить актуальнейшую проблему в этой области строительства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2425926C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2003 |
|
RU2230164C1 |
| СПОСОБ ПОДЪЕМА ЗДАНИЯ С ВЫНОСОМ ВИРТУАЛЬНОЙ ОСИ ПОВОРОТА ЗА ЕГО ПЯТНО | 2018 |
|
RU2683469C1 |
| СПОСОБ СИНХРОННОГО ПОДЪЕМА И ОПУСКАНИЯ ЧАСТИ КОНСТРУКЦИИ ЗДАНИЯ | 2018 |
|
RU2682414C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2003 |
|
RU2242564C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2005 |
|
RU2303107C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ ЗДАНИЯ, СООРУЖЕНИЯ | 2002 |
|
RU2195532C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ, СООРУЖЕНИЙ | 2002 |
|
RU2211896C1 |
| СПОСОБ ВЫРАВНИВАНИЯ ЗДАНИЯ, СООРУЖЕНИЯ | 2014 |
|
RU2575193C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2420631C1 |






Изобретение относится к строительству и может быть применено для подъема и выравнивания многоэтажных зданий и различных сооружений, получивших сверхнормативные крены, в частности, из-за осадки грунтов. Техническим результатом является предотвращение несоответствия показаний датчиков перемещений с реальными перемещениями самого здания, сооружения. Для этого система включает силовой блок, содержащий насосную станцию, электродвигатель, емкость для рабочей гидравлической жидкости, электрогидравлический модуль, обеспечивающий общую подачу рабочей жидкости к исполнительным элементам для подъема и выравнивания, исполнительно-регистрирующий блок, содержащий исполнительные элементы для подъема и выравнивания, электрогидроклапаны, датчики перемещения и блок управления. При этом система дополнительно включает блок обратной связи, содержащий дистанционно отслеживающее устройство геометрического положения здания в пространстве, а также изменение его геометрической формы и передающее устройство, с возможностью отправки собранной информации в блок управления и корректировки управляющих команд на подъем здания, сооружения в реальном режиме времени, а исполнительно-регистрирующий блок дополнительно содержит датчики давления плоских гидравлических домкратов. Причем блок управления выполнен в виде электронного информационно-вычислительного комплекса, снабженного управляющей программой с возможностью осуществления сбора информации с датчиков перемещения и давления, а также блока обратной связи, обработки этой информации и выдачи управляющих команд на электрогидроклапаны для проведения непрерывного цикла подъема в автоматическом режиме. 13 з.п. ф-лы, 8 ил.
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ, СООРУЖЕНИЙ | 1996 |
|
RU2090703C1 |

