Изобретение относится к области строительства и в частности к восстановлению эксплуатационной надежности зданий при их ремонте, осуществляемом путем подъема и выравнивания с последующим усилением строительных конструкций.
Известно техническое решение способа выравнивания зданий заключающийся в том, что удаляют грунт из скважин в напряженной зоне основания здания, перераспределяют нагрузки дополнительным нагруженном фундамента со стороны противоположном крену, для этой цели используют тяжи, лебедки и анкерные устройства (Гильман Я.Д., Гильман Е.Д. Усиление и восстановление зданий на лессовых просадочных грунтах. - М.: Стройиздат, 1989 г., стр. 82-83, рис. 3.14).
Наиболее близким к заявляемому является способ непрерывного подъема и выравнивания зданий (патент №2090703 РФ, Е 02 D 35/00, 1997 г.), включающий их исследование, на основе результатов которых разрабатывают проект, далее выполняют подготовку здания, в том числе изготавливают и монтируют силовые пояса, изготавливают домкратные ниши и устанавливают домкратную систему, состоящую из плоских домкратов и насосной станции, также внутреннюю систему контроля состоящую из датчиков малых перемещений, формируют внешнюю систему контроля, затем выполняют отрыв здания от фундаментов и далее осуществляют его выравнивание путем задания равномерной скорости подъема каждой домкратной ниши и управления величиной подъема фактором времени работы каждого домкрата.
Недостатком известного способа является то, что процесс подъема здания осуществляется пошагово, каждый цикл подъема разбивается на подциклы, в каждом из которых поступают таким образом, что после включения гидравлической системы контролируют перемещения всех домкратных ниш. После подъема на заданную величину всех домкратных ниш, домкраты, расположенные вдоль одной из основных осей здания (например Y), выключают, далее через заданный интервал времени отключают домкраты, находящиеся на ближайшей параллельной оси (Y1), далее, через следующий заданный интервал времени, отключают домкраты, находящиеся на следующей параллельной оси (Y2), и так далее до момента отключения домкратов, находящихся на второй коллинеарной основной оси здания. Такая методика обеспечивает пошаговое выравнивание здания при одинаковой на всех домкратах скорости подъема и управление величинами подъема фактором времени. При этом на каждой оси, вдоль которой останавливаются домкраты, происходит деформирование здания, так как данная ось является осью вращения. В соответствии с этим выравниваемые здания претерпевают дополнительные деформации и как следствие дополнительные разрушения.
Задачей заявляемого изобретения является выравнивание аварийного здания без дополнительных деформаций и разрушений путем уменьшения и устранения сверхнормативных напряжений в строительных конструкциях начиная с первого этапа его подъема и выравнивания.
Сущность изобретения заключается в том, что в способе непрерывного подъема и выравнивания зданий, включающем их исследование, на основе результатов которых разрабатывают проект, далее выполняют подготовку здания, в том числе изготавливают и монтируют силовые пояса, изготавливают домкратные ниши и устанавливают домкратную систему, состоящую из плоских домкратов и насосных станций, также внутреннюю систему контроля, состоящую из датчиков малых перемещений, формируют внешнюю систему контроля, затем путем включения домкратной системы выполняют отрыв здания от фундаментов и в последующем его последовательное поцыкловое выравнивание, при этом в каждом цикле выполняют определение скорости подъема здания для каждой домкратной ниши, для этого вначале получают полное значение подъема каждой домкратной ниши, выраженное в миллиметрах
Hi=Ix·Xi+Iy·Yi.
Затем вычисляют величину подъема в одном цикле выравнивания для наиболее удаленной домкратной ниши от точки или оси вращения здания
Δ Нk=Hk/N,
где N≥ (Hk/Kпр), N - принимают ближайшее большее целое число, полученное как частное от деления максимально необходимого вертикального перемещения здания Нк для полного его выравнивания и предельной величины перемещения одной домкратной ниши Кпр в одном цикле подъема, далее определяют величины изменения продольных и поперечных уклонов в данном цикле выравнивания здания


где n=(Ix/Iy),
затем вычисляют величины подъема в одном цикле выравнивания для всех оставшихся домкратных ниш

по величинам подъема в одном цикле для всех домкратных ниш определяют индивидуальные скорости их подъема для одного и того же интервала времени Δ t

по скорости подъема определяют необходимое количество оборотов в минуту ω κаждого электромотора насосных станций и формируют команду на подъем здания, включают домкратную систему и одновременно хронометр, при этом осуществляют контроль работы каждого электромотора тахометрами, установленными непосредственно на электромоторе, и осуществляют контроль подъема домкратной ниши внутренней системой контроля, после исчисления хронометром интервала времени Δt домкратную систему выключают. Таким образом осуществляется выравнивание здания при разных индивидуальных скоростях на всех домкратах и заданном интервале времени на данный цикл подъема. Это обеспечивает равномерное выравнивание здания без создания дополнительных деформаций и как следствие этого без дополнительных разрушений.
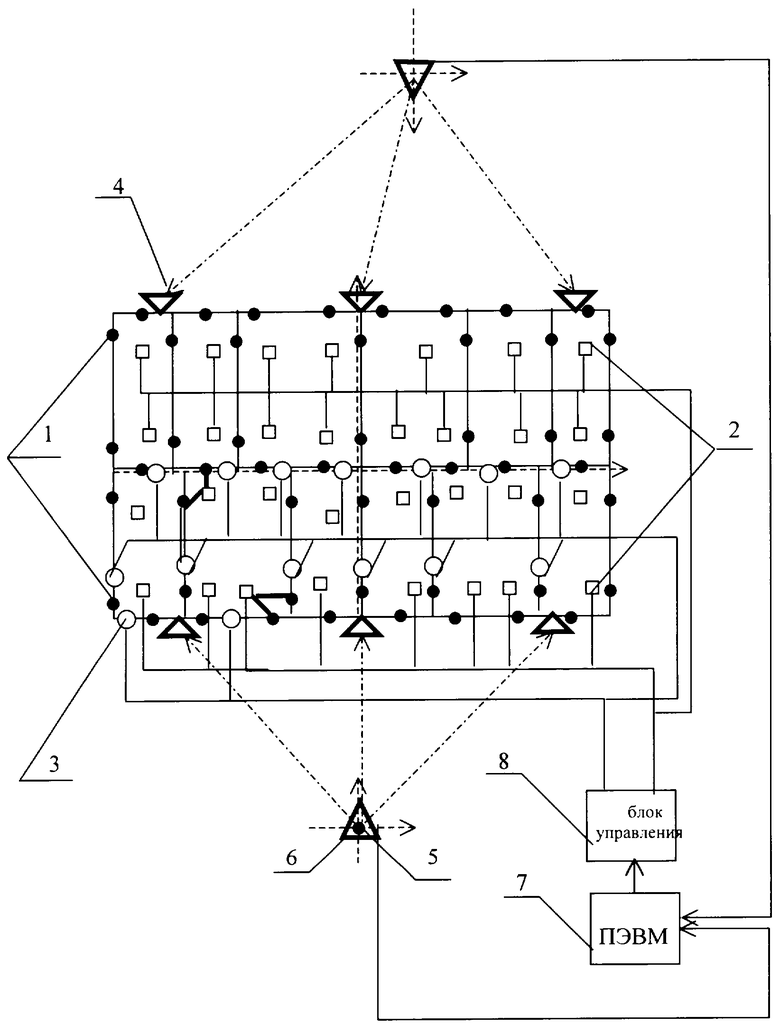
Изобретение поясняется чертежами, где на чертеже - общая схема оборудования при выравнивании зданий.
Для осуществления способа используют гидравлическую систему, включающую плоские домкраты 1 и насосные станции 2, внутреннюю систему контроля, состоящую из датчиков 3 малых перемещений, внешнюю систему контроля, состоящую из светоотражающих марок 4, геодезических центров 5 и координато определяющих средств измерений 6, а также персональный компьютер 7 и блок управления 8 гидравлической системой.
Способ непрерывного подъема и выравнивания зданий, включающий их исследование, на основе результатов которых разрабатывают проект, далее выполняют подготовку здания, в том числе изготавливают и монтируют силовые пояса, изготавливают домкратные ниши и устанавливают домкратную систему, состоящую из плоских домкратов 1 и насосных станций 2, также внутреннюю систему контроля, состоящую, например, из резисторных датчиков малых перемещений 3, формируют внешнюю систему контроля, состоящую, например, из светоотражающих марок 4, устанавливаемых на фасадах здания, геодезических пунктов 5, над которыми центрируют координато определяющие средства измерений, например лазерные электронные тахеометры 6, затем персональный компьютер 7 путем формирования управляющего воздействия на блок управления 8, включают домкратную систему 1, выполняют отрыв здания от фундаментов и далее его последовательное поцыкловое выравнивание, при этом в каждом цикле выполняют определение скорости подъема здания для каждой домкратной ниши, для этого, в случае преобразования наклонной плоскости в горизонтальную, вначале получают полное значение подъема каждой домкратной ниши, выраженное в миллиметрах
Hi=Ix·Xi+Iy·Yi,
затем определяют величину подъема в одном цикле выравнивания для наиболее удаленной домкратной ниши от точки (или оси) вращения здания
Δ Hк=Нк/N,
где N≥ (Hk/Kпр), N - принимают ближайшее большее целое число, полученное как частное от деления максимально необходимого вертикального перемещения здания Нк для полного его выравнивания и предельной величины перемещения одной домкратной ниши Кпр в одном цикле подъема, далее получают величины изменения продольных и поперечных уклонов в данном цикле выравнивания здания


где n=(Ix, /Iy),
затем определяют величины подъема в одном цикле выравнивания для всех оставшихся домкратных ниш

по величинам подъема в одном цикле для всех домкратных ниш определяют индивидуальные скорости их подъема для одного и того же интервала времени Δ t

по скорости подъема определяют необходимое количество оборотов в минуту ω каждого электромотора (позицией на чертеже не обозначен) насосных станций 2 и формируют команду на подъем здания, включают домкратную систему 1 и одновременно хронометр (позицией на чертеже не обозначен), при этом осуществляют контроль работы каждого электромотора тахометрами (позицией на чертеже не обозначен), установленными непосредственно на электромоторе, и осуществляют контроль подъема домкратной ниши внутренней системой контроля 3, после исчисления хронометром интервала времени Δ t домкратную систему выключают. Таким образом осуществляется выравнивание здания при разных индивидуальных скоростях на всех домкратах 1 и заданном интервале времени на данный цикл подъема. Это обеспечивает равномерное выравнивание здания без создания дополнительных деформаций и как следствие этого без дополнительных разрушений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2003 |
|
RU2230164C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2005 |
|
RU2303107C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2420631C1 |
| СИСТЕМА ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2425926C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ, СООРУЖЕНИЙ | 2002 |
|
RU2211896C1 |
| Система подъёма и выравнивания здания, сооружения | 2003 |
|
RU2224845C1 |
| СПОСОБ ПОДЪЕМА ЗДАНИЯ С ВЫНОСОМ ВИРТУАЛЬНОЙ ОСИ ПОВОРОТА ЗА ЕГО ПЯТНО | 2018 |
|
RU2683469C1 |
| СПОСОБ СИНХРОННОГО ПОДЪЕМА И ОПУСКАНИЯ ЧАСТИ КОНСТРУКЦИИ ЗДАНИЯ | 2018 |
|
RU2682414C1 |
| СПОСОБ ВЫРАВНИВАНИЯ ЗДАНИЯ, СООРУЖЕНИЯ | 2014 |
|
RU2575193C1 |
| СПОСОБ ВЫРАВНИВАНИЯ МОНОЛИТНЫХ ЖЕЛЕЗОБЕТОННЫХ СООРУЖЕНИЙ | 2010 |
|
RU2426837C1 |
Способ относится к области строительства, в частности к восстановлению эксплуатационной надежности зданий при их ремонте, осуществляемом путем подъема и выравнивания с последующим усилением строительных конструкций. Способ непрерывного подъема и выравнивания зданий включает их исследование, подготовку здания, в том числе изготовление и монтирование силовых поясов, домкратных ниш и установку домкратной системы, состоящей из плоских домкратов и насосных станций, также внутренней системы контроля, состоящей из резисторных датчиков малых перемещений, формирование внешней системы контроля, затем путем включения домкратной системы выполняют отрыв здания от фундаментов и в последующем его последовательное поцикловое выравнивание. Новым является то, что в каждом цикле определяют скорость подъема здания для каждой домкратной ниши, по приведенным зависимостям, по скорости подъема определяют количество оборотов в минуту ω каждого электромотора насосных станций и формируют команду на подъем здания, включают домкратную систему и хронометр, при этом осуществляют контроль работы каждого электромотора тахометрами, установленными непосредственно на электромоторе, и осуществляют контроль подъема домкратной ниши внутренней системой контроля, после исчисления интервала времени Δt домкратную систему выключают. Технический результат, обеспечиваемый изобретением, состоит в обеспечении равномерного выравнивания здания без создания дополнительных деформаций и без дополнительных разрушений. 1 ил.
Способ непрерывного подъема и выравнивания зданий, включающий их исследование, подготовку здания, в том числе, изготовление и монтирование силовых поясов, домкратных ниш и установку домкратной системы, состоящей из плоских домкратов и насосных станций, так же внутренней системы контроля, состоящей из резисторных датчиков малых перемещений, формирование внешней системы контроля, затем путем включения домкратной системы выполнение отрыва здания от фундаментов и в последующем его последовательное поцикловое выравнивание, отличающийся тем, что в каждом цикле определяют скорость подъема здания для каждой домкратной ниши, для этого вначале получают полное значение подъема каждой домкратной ниши

где Ix, Iy - продольный и поперечный уклоны здания;
Xi, Yi - координаты домкратных ниш,
затем получают величину подъема в одном цикле выравнивания для наиболее удаленной домкратной ниши от точки или оси вращения здания

где N≥(Hк/Kпр), N - ближайшее большее целое число, полученное как частное от деления максимально необходимого вертикального перемещения здания Нк для полного его выравнивания и величины перемещения одной домкратной ниши Кпр в одном цикле подъема,
далее определяют величины изменения продольных Δix и поперечных Δiy уклонов в данном цикле выравнивания здания


где n = (Ix /Iy),
затем вычисляют величины подъема в одном цикле выравнивания для всех оставшихся домкратных ниш

по величинам подъема в одном цикле для всех домкратных ниш определяют скорости их подъема для одного и того же интервала времени Δt


по скорости подъема определяют количество оборотов в минуту ω каждого электромотора насосных станций и формируют команду на подъем здания, включают домкратную систему и хронометр, при этом осуществляют контроль работы каждого электромотора тахометрами, установленными непосредственно на электромоторе и осуществляют контроль подъема домкратной ниши внутренней системой контроля, после исчисления интервала времени Δt домкратную систему выключают.
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ, СООРУЖЕНИЙ | 1996 |
|
RU2090703C1 |

