Изобретение относится к строительству и, в частности, предназначено для выравнивания зданий и сооружений, получивших крен.
Известен способ выравнивания крена сооружения, заключающийся в том, что в гидравлические домкраты, установленные между фундаментом и цокольной частью здания и объединенные между собой общей гидросистемой, подается рабочая жидкость до момента выравнивания рабочего давления в каждом домкрате, после чего с помощью запорных вентелей домкраты со стороны, противоположной крену, отключают, а подачу рабочей среды осуществляют в единую гидросистему, где устанавливается общее для всех домкратов давление, и ведут дальнейшее выравнивание здания домкратами, представляющими собой сообщающиеся сосуды [1]
Недостатком известного способа является относительная равномерность нагрузки на поднимаемую часть сооружения при неравномерной жесткости последней по всему полю приложения нагрузки, что применимо для абсолютно жестких тел и на практике не достигается, а ведет к перегрузке в узлах сооружения, к недопустимым деформациям сооружения, а, значит, к вынужденным остановкам для коррекции нагрузок в перенапряженных местах.
Наиболее близким к заявленному способу является способ устранения крена здания или его части с применением гидравлических цилиндро-поршневых блоков, согласно которому сначала вычисляется осадка здания, как исходное значение перемещения, затем определяется нагрузка на каждый цилиндро-поршневой блок в месте его расположения и вычисленное значение заносится в центральное устройство управления, затем исходное значение перемещения сравнивается с фактическим, и каждый цилиндро-поршневой блок индивидуально или группами приводится в действие в соответствии с этой разницей до достижения предельной для него нагрузки [2]
Недостатком известного способа являются большие габариты цилиндро-поршневых блоков, требующие выполнение больших проемов между фундаментом и цокольным поясом здания для их монтажа. Высокое давление рабочей жидкости в цилиндро-поршневых блоках и большое удельное давление на опорные поверхности фундамента требуют повышенной прочности несущих частей здания или применения распределительных опор, что повышает материалоемкость и удорожает способ.
Кроме того, известны способ имеет ограниченный ресурс подъема здания, обусловленный быстрым исчерпанием рабочего хода цилиндро-поршневых блоков, что не позволяет применять его для выравнивания сильно накрененных зданий.
Целью изобретения является снижение трудоемкости, металлоемкости, стоимости, сокращения времени выравнивания и увеличение ресурсов грузоподъемных устройств.
Это достигается тем, что в способе выравнивания здания, сооружения, включающем определение величины подъема здания в каждом проеме, расчетной массы здания, определения среднего усилия, приходящегося на одно грузоподъемное устройство, количество грузоподъемных устройств, выполнение заданного количества проемов между фундаментом и цокольным поясом здания с последующим монтажем в них грузоподъемных устройств, подключение грузоподъемных устройств к гидросистеме, осуществление подъема здания путем подачи рабочей жидкости под давлением до достижения выравнивания здания и установления в зазор жестких прокладок, грузоподъемное устройство выполняют в виде плоских домкратов с опорными вкладышами и гидроопорами, причем при монтаже на нижнюю плоскость каждого проема устанавливают гидроопору, на которой размещают плоские домкраты с опорными вкладышами, при подъеме сравнивают величину линейного перемещения здания в каждом проеме с расчетной и с помощью ограничителя хода плоских домкратов, после исчерпания ими рабочего хода, их полости соединяют со сливом, одновременно подают рабочую жидкость под давлением в рабочую полость гидроопоры для восстановления плоских домкратов до исходного состояния и фиксируют гидроопору на новом уровне, подают рабочую жидкость в полости восстановленных домкратов до исчерпания ими рабочего хода с последующим восстановлением или для достижения необходимой величины линейного перемещения здания в этом проеме.
Данная совокупность признаков способа позволяет применять его и для устранения крена многоэтажных сооружений независимо от величины крена с малыми энерго-, трудо- и материалозатратами.
Известна система для устранения крена здания или его части, содержащая цилиндро-поршневые блоки в качестве грузоподъемных устройств с узлами управления, центральное устройство управления, насосную станцию с вентелями и несколькими узлами управления для обеспечения плавного и непрерывного функционирования цилиндро-поршневых блоков [2]
Недостатком этой системы являются большие габариты цилиндро-поршневых блоков, что ведет к высокой материалоемкости системы. При этом утечки рабочей жидкости в трущихся парах исключают длительное поддержание давления на заданном уровне без постоянной подачи рабочей жидкости, что повышает энергозатраты и увеличивает стоимость системы.
Наиболее близкой по технической сущности к заявленной является система для подъема сооружений, содержащая соединенное между собой трубопроводами плоские домкраты, центрированные друг относительно друга и снабженные ограничителями хода, между домкратами помещены опорные прокладки с размещенным на них наполнителем, система содержит также насосную станцию с коммуникациями и узел управления [3]
Недостатки известной системы заключаются в большой трудоемкости и длительности выравнивания здания, сооружения, связанные с необходимостью многократного демонтажа плоских домкратов, исчерпавших рабочий ход, для восстановления их на прессе, повторного монтажа домкратов со всем набором элементов, новое подключение к гидросистеме и т.п.
Целью изобретения является снижение трудоемкости, сокращение времени выравнивания здания и увеличение ресурса плоских домкратов.
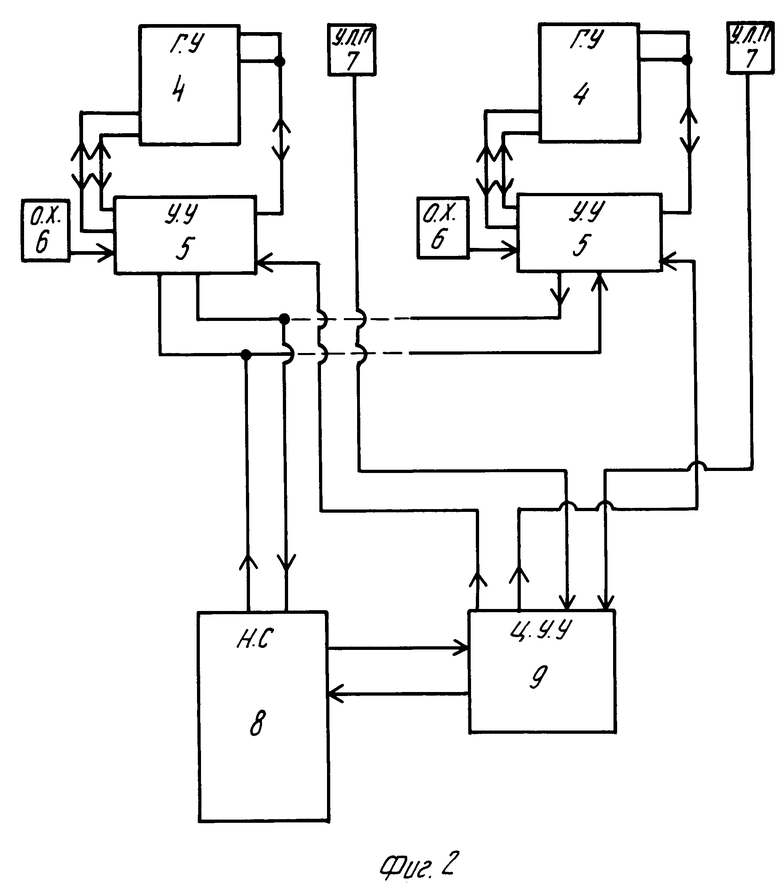
Это достигается тем, что устройство для непрерывного подъема и выравнивания зданий, сооружений, включающее грузоподъемные устройства в виде нескольких центрированных относительно общей оси соединенных между собой трубопроводами плоских домкратов, каждый из которых снабжен сверху и снизу опорными прокладками, указатели линейных перемещений, насосную станцию и узел управления, дополнительно содержит ограничители хода плоских домкратов, центральное устройство управления, при этом гидравлические входы-выходы узлов управления соединены с входами-выходами насосной станции через систему гидравлических коммуникаций, а электрические входы с соответствующими выходами центрального устройства управления, причем каждое грузоподъемное устройство дополнительно снабжено фиксируемой на разных уровнях гидроопорой, на которую соосно устанавливают плоские домкраты с опорными прокладками, выполненными из жесткого материала, при этом гидроопора состоит из корпуса с уплотнительным кольцом и размещенного в нем полого плунжера, внутри которого равномерно по окружности горизонтально расположены гидроцилиндры, поршни-штоки которых являются стопорными пальцами с возможностью вертикального перемещения и с фиксацией их в гнездах корпуса гидроопоры, поршневые полости гидроцилиндров сообщены с рабочей полостью гидроопоры и с ее входным отверстием, а штоковые полости гидроцилиндров посредством трубопроводов и коммутирующей коробки соединены с выходным отверстием гидроопоры, входное и выходное отверстия гидроопоры соединены с вторыми гидравлическими входами-выходами соответствующего узла управления, третий гидравлический вход-выход узла управления соединен с входами-выходами плоских домкратов, при этом каждый узел управления содержит два гидрораспределителя с электроуправлением, реле давления и гидрозамок, входы электромагнитов гидрораспределителей узла управления соединены с выходом соответствующего ограничителя хода, выходы датчиков линейных перемещений здания соединены соответственно со входами центрального устройства управления.
Применение раздвижных гидроопор, выполняющих также функции силовых устройств для восстановления плоских домкратов, исчерпавших рабочий ход, непосредственно в домкратных проемах обеспечивает непрерывный процесс выравнивания зданий плоскими домкратами без остатовок на перемонтаж домкратов, исключает применение разгрузочных приспособлений и большого количества прокладок для расклинки здания во время остановок.
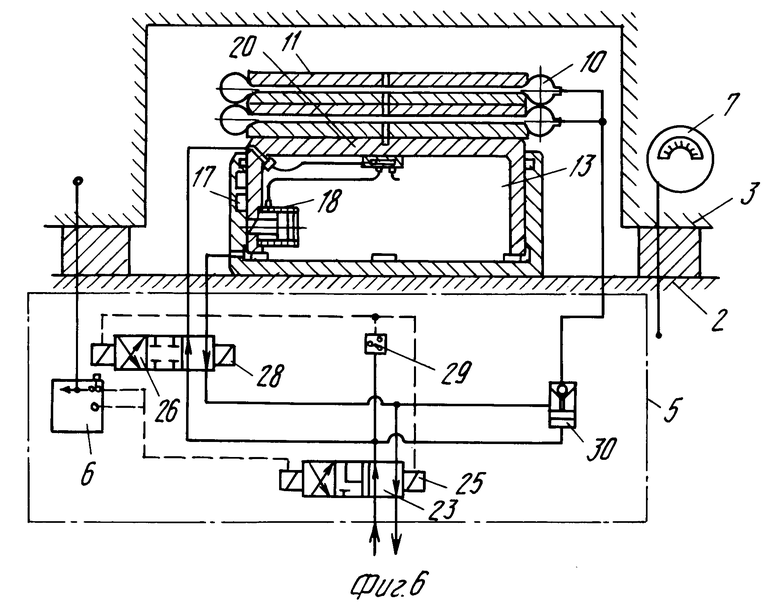
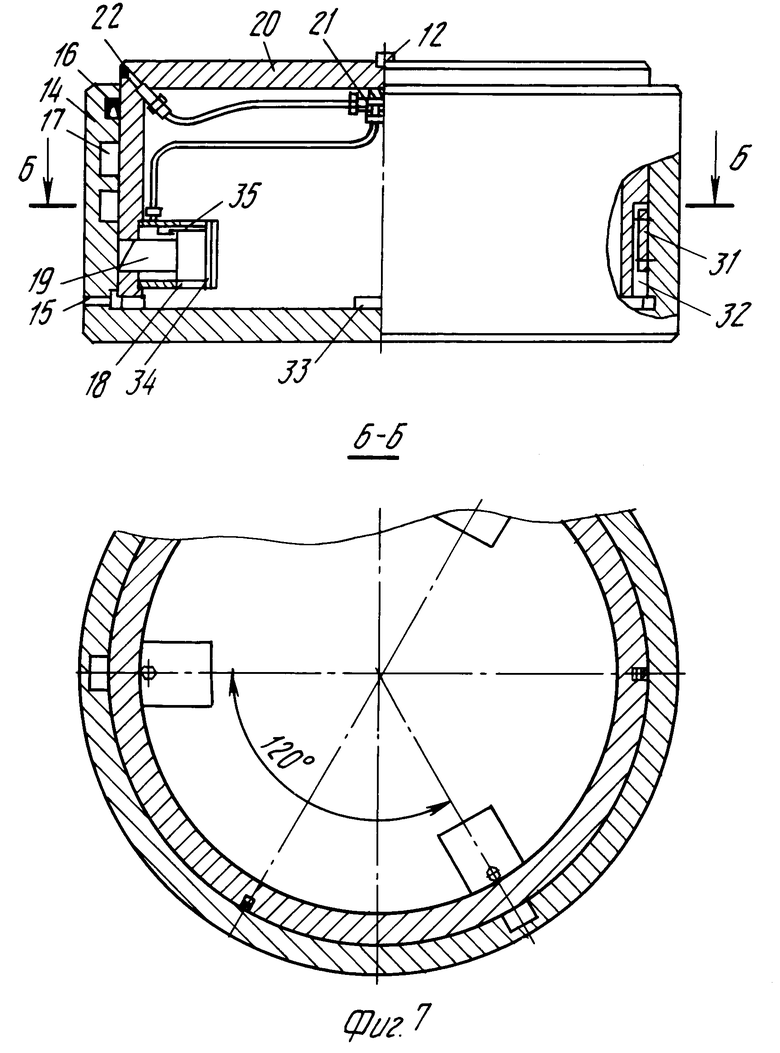
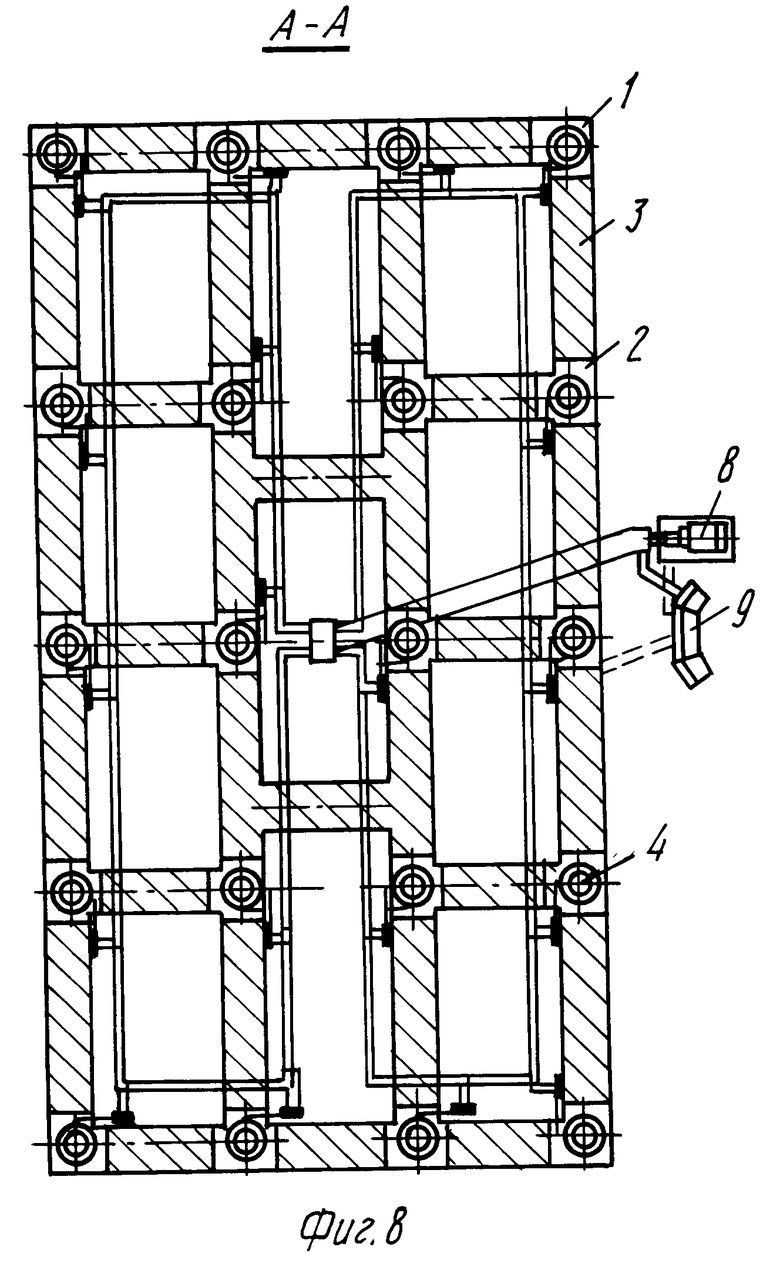
На фиг. 1 представлен общий вид здания с вырывом цоколя, на котором схематически изображены проемы для размещения грузоподъемных устройств между фундаментом и цокольным поясом здания; на фиг. 2 функциональная схема устройства для осуществления предлагаемого способа; на фиг. 3 схема грузоподъемного устройства и его узла управления в исходном положении; на фиг. 4 схема грузоподъемного устройства во время работы плоских домкратов по подъему здания; на фиг. 5 схема грузоподъемного устройства во время работы гидроопоры по восстановлению плоских домкратов и перехода на следующую ступень опирания; на фиг. 6 схема грузоподъемного устройства при возврате грузоподъемного устройства в исходное положение после окончания подъема; на фиг. 7 принципиальная схема гидроопоры; на фиг. 8 разрез А-А на фиг. 1.
Устройство для непрерывного выравнивания зданий, сооружений монтируется в подвальной части здания, где в проемах 1 (фиг. 1 и 8), выполненных между фундаментом 2 и цокольным поясом 3, размещается грузоподъемное устройство 4, а рядом с ними узлы управления 5, ограничители хода 6, указатели 7 линейных перемещений здания, связанные линиями электрической или гидравлической связи соответственно с насосной станцией 8 и центральным устройством 9 управления, вынесенными за пределы здания.
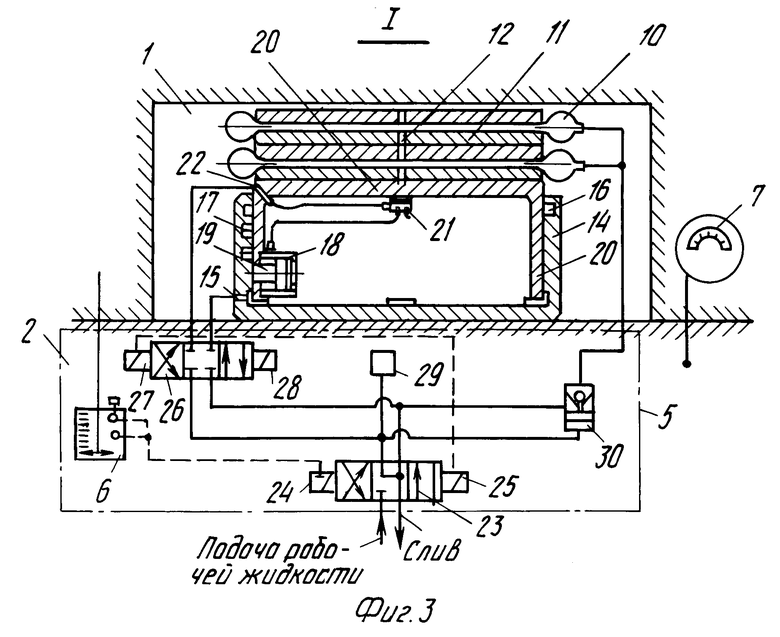
Грузоподъемное устройство 4 (фиг. 3) содержит плоские домкраты 10, опорные вкладыши 11 с центрирующими их стержнями 12, гидроопору 13, состоящую из корпуса 14 с входным отверстием 15, уплотнительным кольцом 16 и с выполненными в корпусе цилиндрическими гнездами 17, гидроцилиндров 18 с поршнями-штоками 19 и сопряженного с корпусом полого плунжера 20 с коммутирующей коробкой 21 и выходным отверстием 22.
Выравнивание здания предлагаемым способом осуществляют в несколько этапов.
Для подготовки здания к выравниванию нивелируют марки, заложенные в цокольную часть здания, и вычисляют высоту подъема конструкции в точках установки грузоподъемных устройств.
Осуществляют мероприятия по предотвращению повреждения инженерных коммуникаций, определяют количество грузоподъемных устройств по зависимости n к1•к2•Q/Рcр
где n количество грузоподъемных устройств (целое число);
к1 среднестатистический коэффициент, учитывающий дополнительную нагрузку при одновременном переопирании нескольких грузоподъемных устройств (к1 1,1-1,3);
к2 среднестатистический коэффициент, учитывающий дополнительную нагрузку при неравномерном отрыве здания от фундамента (к2 1-1.2);
Q масса здания;
Рcр среднее усилие одного грузоподъемного устройства, при котором следует ожидать подъема здания.
Выполняют проемы 1 между фундаментом 2 и цокольным поясом 3, освобождая при необходимости его снаружи от грунта.
Далее в каждый проем 1 устанавливают гидроопору 4, на верхнюю плоскость которой устанавливают плоские гидродомкраты 10 с двумя жесткими опорными вкладышами 11 каждый, центрируя их между собой стержнями 12. Рядом с проемами или под ними укрепляют узлы управления, соединяя их соответственно с устройствами 4 посредством гибких рукавов.
Ограничители хода плоских домкратов 6 посредством стальной струны соединяют с цокольной частью здания. Насосную станцию 8 и центральное устройство управления 9 размещают на расстоянии 8-10 м от здания, монтируют систему гидравлических коммуникаций и обеспечивают все необходимые связи в соответствии с функциональной схемой (фиг. 2).
Устройство управления 9 включает насосную станцию 8 и инициирует узлы управления 5, и рабочая жидкость поступает в полости плоских домкратов. При наращивании давления до получения соответствующего усилия в домкрате начинают подъем здания. Величина подъема контролируется с помощью указателей линейных перемещений 7. При исчерпании рабочего хода плоскими домкратами в каком-нибудь проеме (замкнутый контакт ограничителя хода 6) включается режим автоматического восстановления плоских домкратов в данном проеме, гидроопора 14 совершает рабочий ход, фиксируется на следующем уровне, и снова включается рабочий ход плоских домкратов, при этом режим работы других грузоподъемных устройств не меняется. Ослабленное усилие при восстановлении домкратов кратковременно компенсируется соседними грузоподъемными устройствами, при размещении которых учитывается эта работа и жесткость цоколя здания.
Подъем идет непрерывно. После достижения заданной величины подъема в образовавшиеся между фундаментом и цоколем зазоры устанавливают жесткие прокладки, являющиеся частью окончательной заделки зазоров, и независимо от величины деформации плоских домкратов устройство 9 через узлы 5 задает режим возврата всех устройств 4 в исходное состояние. После этого систему демонтируют и окончательно заделывают зазоры.
Предложенный способ реализуется устройством для непрерывного выравнивания зданий (фиг. 2), содержащем грузоподъемные устройства 4, узлы управления 5, ограничители хода 6, указатели линейного перемещения здания 7, насосную станцию 8 и центральное устройство управления 9.
Грузоподъемное устройство 4 (фиг. 3) содержит плоские домкраты 10, опорные вкладыши 11 со стержнями 12, гидроопору 13, состоящую из корпуса 14 с входным отверстием 15, уплотнительным кольцом 16, и с выполненными в корпусе гнездами 17 гидроцилиндров 18, в которые входят поршни-штоки 19, и сопряженного с корпусом плунжера 20 с коммутирующей коробкой 21 и выходным отверстием 22.
Расстояние между осью цилиндра и осью нижнего гнезда, а также между осями гнезд по вертикали равны 80% или 90% рабочего хода плоских домкратов (для увеличения ресурса последних).
Узел управления 5 (фиг. 3) содержит гидрораспределитель 23 с электромагнитами 24 и 25, гидрораспределитель 26 с электромагнитами 27 и 28, реле давления 29, гидрозамок 30, запирающий рабочую жидкость в полостях плоских домкратов во время остановок. Гидравлические элементы узла связаны между собой гидравлическими коммуникациями. Выходы контактной группы ограничителя хода 6 соединены с электромагнитом 24 гидрораспределителя 23, работа которого обеспечивает подачу рабочей жидкости в плоские домкраты. Выходы контактов реле давления 29 связаны с электромагнитом 25 гидрораспределителя 23 и с электромагнитом 27 гидрораспределителя 26, обеспечивающих подачу рабочей жидкости в полость гидроопоры 13 с одновременным сливом из штоковых полостей гидроцилиндров 18 и плоских домкратов 10.
Гидроопора 13 (фиг. 6) состоит из корпуса 14 с входным отверстием 15, уплотнительным кольцом 16 и цилиндрическими гнездами 17 гидроцилиндров 18, в которые входят поршни-штоки 1(, из полого плунжера 20 с коммутирующей коробкой 21 и выходным отверстием 22. Кроме того, в корпусе установлены скользящие шпонки 31, входящие в пазы 32 плунжера, в нижней кромке которого выполнены окна 33, гидроцилиндры снабжены стопорными кольцами 34 и скользящими шпонками 35.
Шпонки 31, входящие в пазы 32, препятствуют вращению плунжера вокруг оси. Выполненные в нижней кромке полого плунжера окна 33 предназначены для пропуска рабочей жидкости от входного отверстия в корпусе 14 гидроопоры. Количество гидроцилиндров 18 может быть любым, но не менее трех, определяющих плоскость фиксации плунжера. Шпонки 35, установленные на внутренних поверхностях корпусов гидроцилиндров 18, препятствуют проворачиванию поршней-штоков 19 вокруг оси, обеспечивая возможность свободно выходить из гнезд при движении плунжера 20 вверх благодаря скошенным торцам.
Насосная станция 8 состоит из маслобака, насоса с электроприводом, датчиков давления, распределительной и управляющей аппаратуры, контрольных манометров с кранами-демпферами и служит для подачи рабочей жидкости в систему гидравлических коммуникаций, состоящую из рукавов высокого давления и коммутирующих устройств.
Центральное устройство управления 9, анализируя показания датчиков давления и указателей линейных перемещений здания, инициирует работу насосной станции и узлов давления и, как вариант реализации, выполнено в виде пульта управления (с оператором).
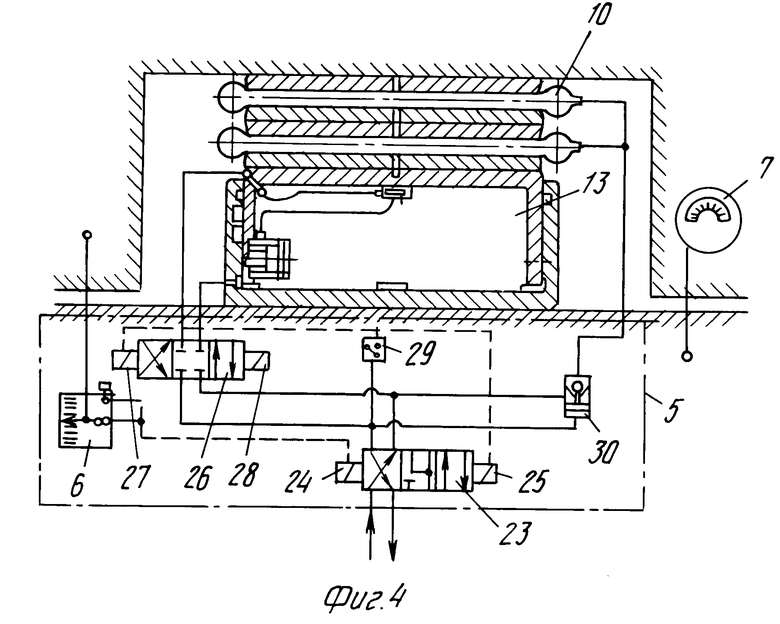
Устройство для непрерывного выравнивания зданий работает следующим образом. С пульта управления центрального управляющего устройства 9 включают насосную станцию 8, электромагнит 24 гидрораспределителя 23, и рабочая жидкость по рукавам гидрокоммуникаций через гидрораспределитель 23 и гидрозамок 30 поступает в полости плоских домкратов 10. Затем давление рабочей жидкости постепенно повышают до достижения усилия подъема здания, увеличивают подачу и начинают подъем. Величина зазора между фундаментом 2 и цоколем 3 контролируется ограничителем хода плоских домкратов 6.
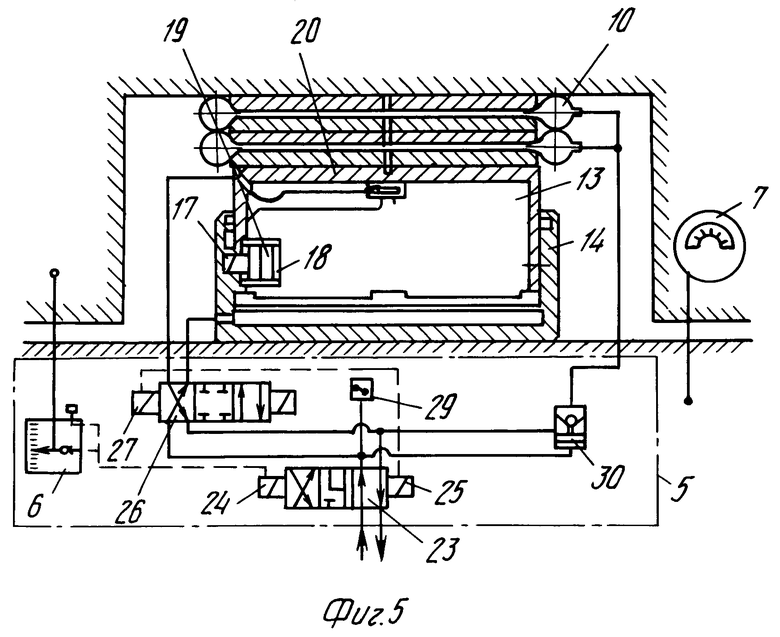
В момент исчерпания плоскими домкратами рабочего хода замыкается контакт ограничителя хода 6, и электромагнит 24 гидрораспределителя 23 отключается, переводя последний в нейтральное положение. Одновременно сигнал о прекращении рабочего хода этим грузоподъемным устройством поступает на пульт управления, и оператор включает автоматический режим восстановления плоских домкратов в этом проеме и включения их снова в работу. Общий подъем здания при этом не останавливается, а нагрузку от сниженного усилия кратковременно воспринимают соседние грузоподъемные устройства. Режим восстановления плоских домкратов осуществляется в следующей последовательности. Включается электромагнит 25 гидрораспределителя 23 и электромагнит 27 гидрораспределителя 26. Рабочая жидкость по трубопроводам поступает в полость гидроопоры и под управляющий поршень гидрозамка 30, открывая его. При этом сливается рабочая жидкость по трубопроводам из штоковых полостей гидроцилиндров 19 и из плоских домкратов, не препятствуя их восстановлению. В момент окончания восстановления плоских домкратов 10 их плоскости смыкаются, и давление в гидросистеме скачкообразно поднимается, срабатывает реле давления 29, электромагниты 27 и 26 отключаются, переводя гидрораспределители в нейтральное положение. Одновременно поршни-штоки 19 гидроцилиндров под воздействием давления в полости гидроопоры входят в гнезда 17, фиксируя гидроопору в этом положении для дальнейшего подъема. Включают электромагнит 24 гидрораспределителя 23 и продолжают подъем вплоть до его завершения.
В окончательно сформировавшийся зазор между фундаментом и цоколем здания устанавливает жесткие прокладки и, независимо от величины деформации плоских домкратов, с пульта управления включают режим автоматического восстановления плоских домкратов, описанных выше, а затем электромагниты 25 и 28 гидрораспределителей 23 и 26. При этом рабочая жидкость поступает в штоковые полости гидроцилиндров 18, возвращая поршни-штоки 19 в исходное положение до упора в стопорные кольца 34, расстопоривая плунжер, а из полости гидроопоры рабочая жидкость сливается. Плунжер под воздействием собственного веса и веса домкратов опускается, приводя грузоподъемное устройство в исходное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система подъёма и выравнивания здания, сооружения | 2003 |
|
RU2224845C1 |
| СПОСОБ СИНХРОННОГО ПОДЪЕМА И ОПУСКАНИЯ ЧАСТИ КОНСТРУКЦИИ ЗДАНИЯ | 2018 |
|
RU2682414C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ ЗДАНИЯ, СООРУЖЕНИЯ | 2002 |
|
RU2195532C1 |
| СПОСОБ ПОДЪЕМА ЗДАНИЯ С ВЫНОСОМ ВИРТУАЛЬНОЙ ОСИ ПОВОРОТА ЗА ЕГО ПЯТНО | 2018 |
|
RU2683469C1 |
| ЛИФТ | 1997 |
|
RU2114044C1 |
| СПОСОБ ВЫРАВНИВАНИЯ МОНОЛИТНЫХ ЖЕЛЕЗОБЕТОННЫХ СООРУЖЕНИЙ | 2010 |
|
RU2426837C1 |
| ЛИФТ | 1996 |
|
RU2094356C1 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА СВАЙНЫХ КОНСТРУКЦИЙ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1998 |
|
RU2133313C1 |
| ГОРНОПРОХОДЧЕСКАЯ МАШИНА С ГИДРОМЕХАНИЧЕСКИМ РАБОЧИМ ОРГАНОМ | 1995 |
|
RU2100598C1 |
| ГИДРОСИСТЕМА ПРИВОДА ПОДАЧИ СТАВА БУРОВОГО СТАНКА | 1997 |
|
RU2127796C1 |
Способ и устройство для непрерывного подъема и выравнивания зданий, сооружений относятся к строительству и предназначены для выравнивания зданий и сооружений, получивших крен. Изобретение за счет обеспечения непрерывного процесса подъема и увеличения ресурса плоских домкратов позволяет значительно снизить трудоемкость, стоимость и время выравнивания зданий, сооружений. Это достигается тем, что способ содержит операции, позволяющие производить восстановление плоских домкратов, исчерпывавших рабочий ход, непосредственно в домкратных проемах, не прерывая подъема здания, а устройство для осуществления данного способа содержит грузоподъемные устройства 4, узлы 5 управления, ограничители хода 6, указатели 7 линейных перемещений здания, насосную станцию 8 и центральное устройство 9 управления, причем грузоподъемное устройство состоит из плоских домкратов 10, опорных вкладышей 11 и гидроопоры 13, самоустанавливающейся на новом уровне каждый раз после восстановления плоских домкратов. 2 с.п.ф-лы, 8 ил.
| SU, авторское свидетельство, 1590512, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EР, заявка, 0043078, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| DE, заявка, 2734550, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
