Изобретение относится к измерительной технике, а именно к способам измерения геометрических размеров объектов, в частности к способам измерения геометрических размеров контактного провода электрической сети железной дороги.
Известен способ измерения геометрических параметров протяженного объекта видеокамерой при относительном линейном перемещении по заявке 99119696/28 от 14.09.99 г. , в котором корпус видеокамеры ориентируют вокруг ее продольной оси относительно номинального (рабочего) положения на угол 90o, при котором линии строчной развертки в изображении видеокамеры перпендикулярны направлению перемещения объекта, а продольную ось видеокамеры - относительно плоскости горизонта на угол 20-25o объективом вверх и на объект, а результаты измерений обрабатывают на компьютере.
Недостатком способа измерения является то, что если протяженный объект представляет собой линию переменной кривизны в горизонтальной и вертикальной плоскостях, как, например, это реально имеет место для электрического контактного провода железной дороги система измерения геометрических размеров объекта не может однозначно оценить ситуацию изменения параметра по причине, либо произошло изменение расстояния между видеокамерой и объектом из-за изменения кривизны объекта при его относительном перемещении относительно измерителя, либо по причине изменения геометрического параметра объекта, либо произошло совпадение этих двух событий.
Реальная кривизна контактного провода железной дороги характеризуется следующими параметрами (см. фиг.1), где:
1 - опора контактных проводов;
2 - контактный провод;
3 - рельсы;
4 - продольная ось рельсового пути.
Высота подвески контактного провода над уровнем головки рельса на перегонах и станциях колеблется в диапазоне 5750 - 6800 мм (Железные дороги. Общий курс. М., Транспорт, 1991 г., 11.3).
Задачей, решаемой настоящим изобретением, является увеличение функциональных возможностей способа измерения геометрических параметров протяженного объекта видеоспособом, а именно высокоточное измерение параметров при криволинейном исполнении протяженного объекта.
Эта задача решается:
- путем измерений одновременно второй видеокамерой, размещенной симметрично первой относительно вертикальной плоскости, пересекающей в месте измерений середину протяженного объекта вдоль;
- путем реализации дополнительных независимых перемещений видеокамер по двум взаимно перпендикулярным направлениям (горизонтальном и вертикальном).
Для пояснения сущности предлагаемого способа рассмотрим сначала способ измерения геометрических параметров протяженного объекта, например контактного электрического провода железной дороги одной видеокамерой.
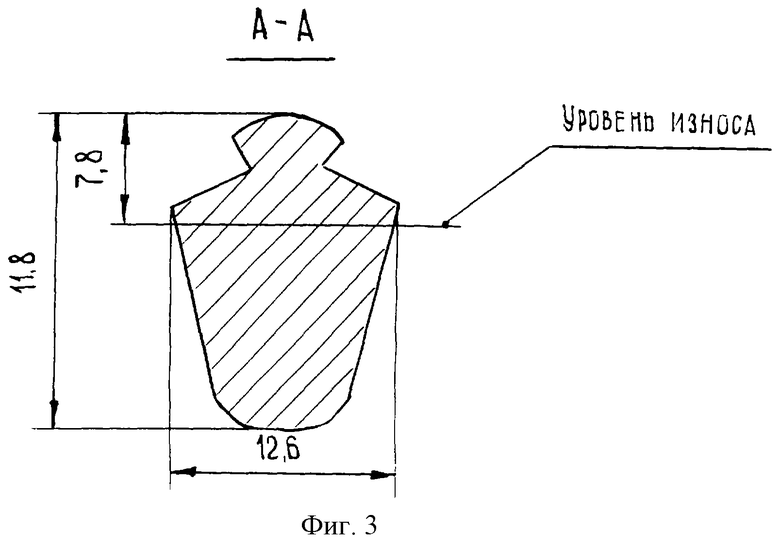
На фиг.2 представлено взаимное расположение видеокамеры 1 и контактного электропровода 2. Оптическая ось 3 видеокамеры 1 направлена на боковую поверхность контактного электропровода 2, поперечное сечение которого изображено на фиг.3.
Видеокамера 1 кинематически связана (закреплена) с движущейся платформой (вагоном) 4.
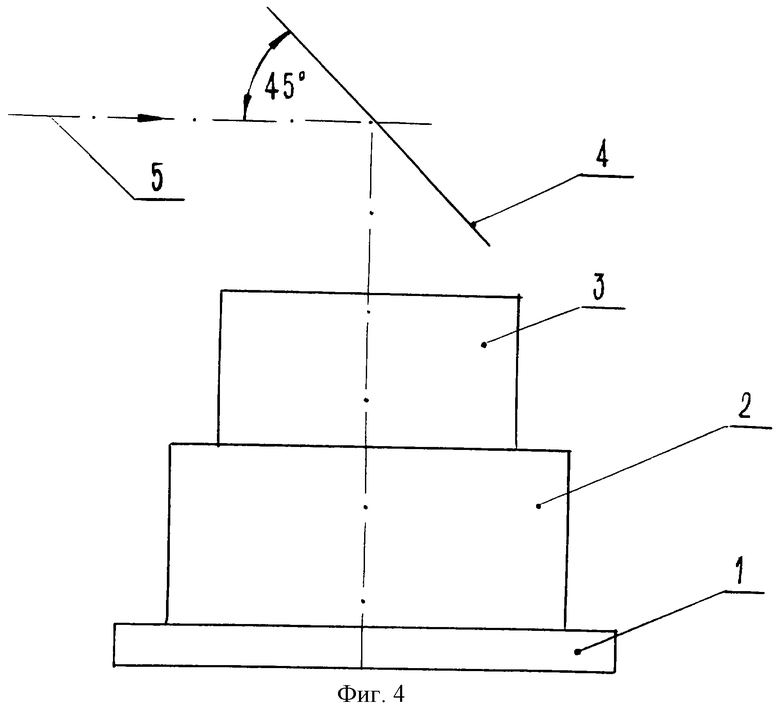
Для примера реализации способа используем телевизионную передающую камеру типа ПТК-36 с оптической приставкой ОП-19 и с видеконом ЛИ-438, работающем в видимом и инфракрасном диапазонах, что обеспечивает работу в любое время суток. Упрощенно структурная схема ПТК-36 представлена на фиг. 4, где:
1 - основание камеры;
2 - фокусирующе-отклоняющая система с передающей трубкой;
3 - оптическая головка;
4 - отклоняющее зеркало (оптическая головка совместно с отклоняющим зеркалом представляют собой оптическую приставку ОП-19);
5 - оптическая ось камеры.
Технические характеристики ПТК-36:
- скорость съемки (VK) 25 кадров/с;
- диаметр линзы оптической приставки (Д) ≈ (40 мм;
- количество строк (ПK) строчной разверстки - 625;
- длительность строчной разверстки (tn) - 64 • 10-6с.
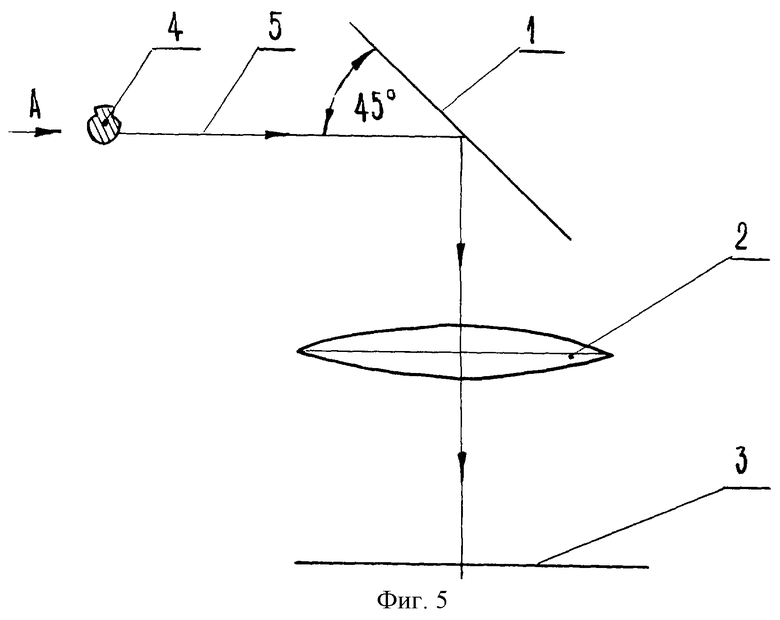
На фиг. 5, 6 показано взаимное положение контактного электропровода и видеокамеры, изображенной в упрощенном виде, с разворотом корпуса видеокамеры вокруг оптической оси на 90o, где:
1 - отклоняющее зеркало;
2 - линза оптической головки;
3 - мишень передающей телевизионной трубки;
4 - контактный электропровод;
5 - оптическая ось видеокамеры.
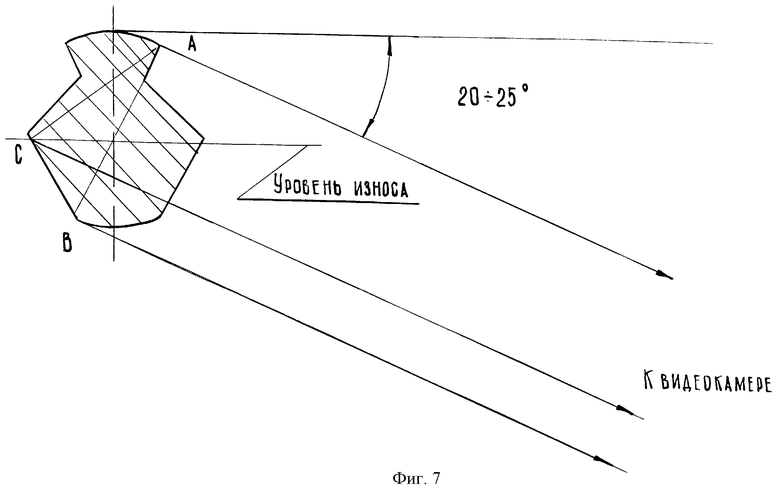
Учитывая, что контактные электропровода железной дороги имеют вертикальные подвески и горизонтальные растяжки, которые могут помешать работе движущегося измерителя - видеокамеры, последнюю ориентируют вокруг оси контактного провода на угол 20-25o относительно плоскости горизонта объективом вверх и на объект (см. фиг. 7), чего достаточно для оценки геометрического размера провода в поперечном направлении.
С целью более качественного получения изображения размера провода с помощью видеокамеры последнюю ориентируют относительно объектива таким образом, чтобы ее оптическая ось была перпендикулярна линии провода.
На фиг. 8 показано изображение 1 видеосигнала от контактного электропровода на экране приемной телевизионной трубки 2 на фоне строк 3 строчной разверстки, линии которой пересекают изображение 1.
При интервале (ΔI) измеряемой длины контактного электропровода и длительности строчной разверстки ТK=64 • 10-6 с скорость взаимного перемещения объекта и видеокамеры определяется из выражения:
W=ΔI/TK=10 (мм)/64 • 10-6=576 км/ч.
При реальной скорости движения электропоезда - W=100 км/ч расстояние между измеряемыми высотами контактного электропровода составит величину менее 2 мм.
Получение качественного изображения объекта с возможностью автоматической обработки величины его сигнала в ПТК-36, как ранее отмечали, используется оптическая приставка ОП-19, которая представляет собой оптико-механическое устройство, предназначенное для проецирования оптического изображения наблюдаемых объектов на мишень передающей трубки. ОП-19 позволяет осуществлять дистанционное управление фокусированием (ближе-дальше) и масштабированием наблюдаемых объектов. Для используемых в ОП-19 объективах типа "Гелиос-65" и "Мир" (шесть линз) минимальное фокусное расстояние составляет 0,5 м. Это, в свою очередь, при угле наклона ПТК-36 - 20-25o даст возможность размещения камеры на безопасном расстоянии от токонесущих проводов.
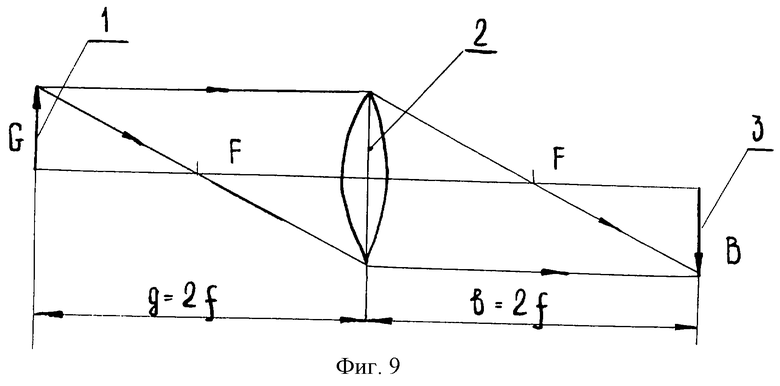
Упрощенно принцип получения изображения и оценки его размера для одной линзы показан на фиг.9, где:
1 - размер объекта G;
2 - линза;
3 - размер изображения объекта В.
При постоянных расстояниях между объектом и линзой, линзой и изображением размер B= G. Это означает, что любое изменение геометрического размера объекта приводит к пропорциональному изменению размера изображения В.
Соответственно длительность видеосигнала, снимаемого с ПТК-36, будет также пропорционально геометрическому размеру объекта.
На фиг. 10 представлена структурная схема обработки информации видеокамеры, где:
1 - видеокамера;
2 - преобразователь "длительность сигнала - код";
3 - ЭВМ;
4 - датчик скорости;
5 - преобразователь "напряжение - код".
Сигнал с видеокамеры 1 поступает на преобразователь "длительность сигнала - код" 2, представляющий собой счетчик импульсов и высокочастотный генератор.
В преобразователе 2 количество высокочастотных импульсов, поступающих на вход счетчика, пропорционально длительности сигнала с видеокамеры 1.
Ниже дана оценка параметров преобразователя "длительность сигнала - код" и связанная с этим точность измерения геометрического размера протяженного объекта.
При ширине вагона ~3 м примем расстояние между контактным электропроводом и каждой видеокамерой ~1,5 м (минимальное расстояние для видеокамер - 0,5 м). Угол зрения видеокамер в вертикальной плоскости ±3o, тогда поле зрения каждой видеокамеры составит:
а = 2х(1500 • tg3o)=2 • 75=15 (мм).
Исходя из того, что длительность строчной развертки - 64 • 10-6ceк., а максимальный геометрический размер контактного электропровода - 12,7 мм, составим соотношение:
150 мм - 64 • 10-6 с,
12,7 - Х с.
Х = 12,7 • 64 • 10-6 с/150 ≈ 5,1 • 10-6с = 5,1 мкс.
Примем требуемую точность измерения геометрического размера -0,1 мм, тогда число импульсов в преобразователе должно соответствовать отношению:
n=12,7/0,1=127 (имп).
Период следования импульсов высокочастотного генератора должен быть таким, чтобы показания заполненного счетчика за время длительности сигнала равнялось 127.
Для обеспечения этого:
Т=5,1/127=0,05 мкс,
или частота
F=1/T=1/0,05=20 МГц,
Что вполне реализуемо.
Код с преобразователя 2 поступает на ЭВМ 3, куда также поступает код скорости перемещения видеокамеры. Информацию о скорости принимают с датчика скорости 4 электровоза в виде напряжения, которое с помощью преобразователя "напряжение - код" 5, выполненное, например, на аналого-цифровом преобразователе типа К572ПВ1 или КШ3ПВ1, на выходе которого получают код скорости. ЭВМ 3 интегрирует скорость и формирует путь, осуществляя при этом временную привязку геометрического размера контактного электропровода и пути, пройденного электровозом относительно некоторого известного места (например, выходной стрелки железнодорожного вокзала).
Текущая информация о пути и геометрическом размере объекта регистрируется в ЭВМ, а затем обрабатывается в стационарных (лабораторных) условиях.
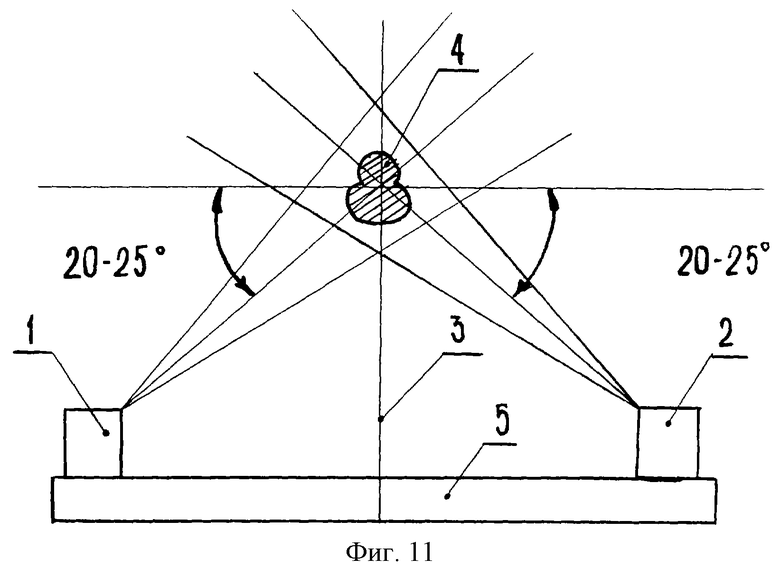
Фиг. 11 поясняет предложенный способ измерения геометрических параметров протяженного объекта, например электрического контактного провода ж/д.
В соответствии с предложенным способом размещена вторая видеокамера 2 симметрично первой видеокамеры 1 относительно вертикальной плоскости 3, пересекающей центр контактного провода 4 вдоль, при этом обе видеокамеры 1,2 размещены на общей платформе 5.
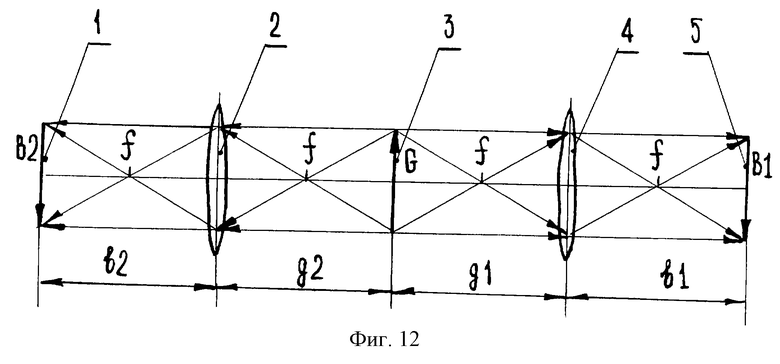
При равенстве расстояний между камерами 1, 2 и объектом 4 (плоскостью 3) и при нахождении последнего в фокусах обоих видеокамер изображения в каждой видеокамере одинаковы, одинаковы и размахи изображений. Упрощенно это показано на фиг. 12, где:
В1 и В2 - соответственно величина размахов изображений от первой и второй линз;
G - размер протяженного объекта;
q1 и q2 - соответственно расстояния от первой и второй линз до изображения;
д1 и д2 - соответственно расстояния от первой и второй линз до объекта.
Поскольку величина увеличения β одной линзы определяется зависимостью:
β=B/G=в/q,
то величина размаха изображения линзы В определяется из выражения:
B = β • G=G • (в/q)
Таким образом, между величинами размахов изображений на видеомониторах и размером объекта существует прямо пропорциональная зависимость, и увеличение или уменьшение геометрического размера объекта, находящегося в среднем положении относительно видеокамеры, приводит в к соответствующему увеличению или уменьшению размаха изображений в каждой видеокамере, однако размеры этих изображений будут одинаковы.
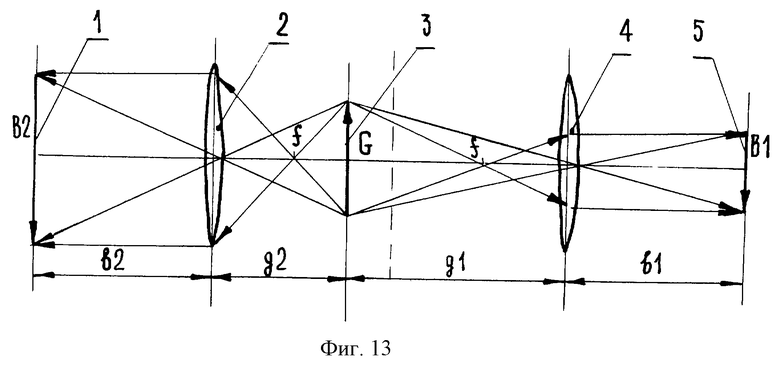
При смещении объекта, например, влево приводит к изменению размаха изображений в видеокамерах (и в видеомониторах) таким образом, что в одной из видеокамер размах изображения уменьшается, а в другой увеличивается.
Упрощенно это показано на фиг.13, где:
- В1 и В2 - соответственно размахи изображений от двух линз;
- G - размер объекта;
- в1 и в2 - соответственно расстояния от первой и второй линз до изображения;
g1 и g2 - соответственно расстояния от первой и второй линз до объекта;
- f - фокусное расстояние.
Для первой линзы в1>2f, g1<2f, соответственно В1=(в1/g1)•G - стал меньше размер объекта G.
Для второй линзы f<в1<2f, g2>2f, соответственно В2=(в2/g2)•G - стал больше размер объекта G.
Изменение размаха изображения во временной области приводит к соответствующему изменению длительностей сигналов обеих видеокамер. На фиг.14 в качестве примера приведена возможная картина на видеомониторах, когда объект изменяет свое положение относительно видеокамер, где:
1 - видеомонитор первой видеокамеры;
2 - строчная развертка на видеомониторе первой видеокамеры;
3 - изображение объекта на видеомониторе первой видеокамеры;
4 - видеомонитор второй видеокамеры;
5 - строчная развертка на видеомониторе второй видеокамеры;
6 - изображение объекта на видеомониторе второй камеры;
Т1 - размах изображения при приближении объекта к первой видеокамере;
Т2 - размах изображения при удалении объекта от второй видеокамеры.
Если одновременно со смещением произошло изменение размера объекта, одинаково изменяются размахи изображений в обеих видеокамерах.
На фиг. 14 черным фоном показано уменьшение размаха изображений, пропорционального уменьшению размера объекта.
Поскольку величины Т1 и Т2 на фиг.14 прямо пропорциональны размеру объекта, независимо от его положения относительно видеокамер, среднее значение длительности сигнала изображения определяется выражением:
Тcр=(Т1+Т2)/2 и определяет усредненный геометрический размер объекта.
Разность Т1,2= Т1-Т2 зависит от величины отклонения видеокамер относительно номинального (среднего) положения (симметрично относительно вертикальной плоскости, пересекающей центр конечного провода), а знак разности указывает на направление отклонения.
Изменение положения протяженного объекта в вертикальной плоскости связано с прохождением высоковольтной контактной линии под мостами, в туннелях и др., когда изменение высоты подвески контактного провода относительно головки рельс, как отметили выше, может меняться от 5750 до 6800 мм.
Смещение контактного провода в вертикальной плоскости сопровождается смещением изображения в видеомониторах.
С целью получения во времени обеими видеокамерами изображений от одних и тех же физических элементов протяженного объекта выполняются следующие операции по размещению видеокамер на платформе.
Во-первых, первая видеокамера, расположенная справа по ходу движения электропоезда, разворачивается на угол 90o вокруг оси относительно своего номинального (рабочего) положения по часовой стрелке (фиг. 15),
где 1 - изображение строчной развертки первой видеокамеры при ее номинальном (рабочем) положении;
2 - положение первой видеокамеры после ее разворота на угол 90o по часовой стрелке;
3 - начало строчной развертки в первой видеокамере, в ее новом положении после разворота вокруг оси на угол 90o по часовой стрелке;
4 - направление движения электропоезда;
5 - положение токонесущего электропровода;
6 - обратный ход строчной развертки первой видеокамеры.
Во-вторых, вторая видеокамера, расположенная слева по ходу движения электропоезда, разворачивается на угол 90o вокруг оси относительно своего номинального (рабочего) положения против часовой стрелки (фиг.16),
где 1 - изображение строчной развертки второй видеокамеры при ее номинальном рабочем положении;
2 - положение второй видеокамеры после ее разворота на угол 90o против часовой стрелки;
3 - начало строчной развертки второй видеокамеры в ее новом положении, после разворота вокруг оси на угол 90o против часовой стрелки;
4 - обратный ход строчной развертки второй видеокамеры;
5 - токонесущий электропровод;
6 - направление движения электропоезда.
В-третьих, ЭВМ осуществляет во времени относительно команды "начало работы" синхронизацию строчных разверток обеих видеокамер (фиг.17) где:
1 - начало работы ЭВМ;
2 - синхроимпульс "привязки" начала строчной развертки каждой видеокамеры при внешнем управлении запуском развертки видеокамер;
3 - вид команды режима "Внутренний запуск" видеокамер;
4 - вид команды "Внешний запуск" видеокамер;
5 - кадры первой видеокамеры при внутреннем запуске строчной развертки;
6 - кадры первой видеокамеры после привязки к синхроимпульсу внешнего запуска строчной развертки;
7 - кадры второй видеокамеры при внутреннем запуске строчной развертки;
8 - кадры второй видеокамеры после привязки к синхроимпульсу внешнего запуска строчной развертки.
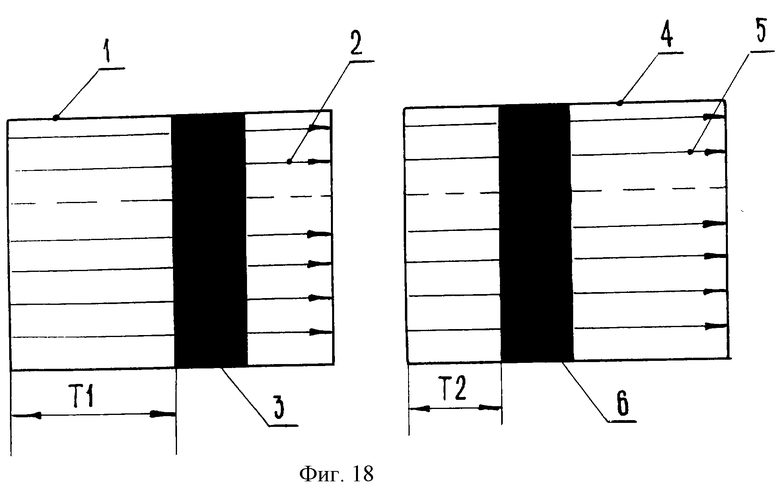
При смещении по высоте токонесущего электропровода вниз изображение на видеомониторе на первой видеокамере смещается вправо, а изображение на видеомониторе от второй видеокамеры смещается влево (фиг.18), где:
1 - видеомонитор первой видеокамеры;
2 - строчная развертка на видеомониторе первой видеокамеры;
3 - изображение объекта на видеомониторе первой видеокамеры;
4 - видеомонитор второй видеокамеры;
5 - строчная развертка на видеомониторе второй видеокамеры;
6 - изображение объекта на видеомониторе второй видеокамеры.
Если токонесущий электропровод смещается вверх, картина на видеомониторах изменится на обратную (фиг.19),
где 1 - видеомонитор первой видеокамеры;
2 - строчная развертка на видеомониторе первой видеокамеры;
3 - изображение объекта на видеомониторе первой видеокамеры;
4 - видеомонитор второй видеокамеры;
5 - строчная развертка на видеомониторе второй видеокамеры;
6 - изображение объекта на видеомониторе второй видеокамеры.
Величина полуразности  характеризует величину смещения токонесущего электропровода по высоте, а знак полуразности - направление отработки управляемым приводом. Таким образом, непринятие мер по отслеживанию токонесущего электропровода в вертикальной плоскости приведет к его выходу из поля зрения видеокамер.
характеризует величину смещения токонесущего электропровода по высоте, а знак полуразности - направление отработки управляемым приводом. Таким образом, непринятие мер по отслеживанию токонесущего электропровода в вертикальной плоскости приведет к его выходу из поля зрения видеокамер.
На фиг.20 представлена структурная схема реализации предложенного способа измерения параметров протяженного объекта, где:
1 - контактный электрический провод;
2 - первая видеокамера;
3 - вторая видеокамера;
4 - подвижная платформа;
5 - горизонтальный привод;
6 - вертикальный привод;
7 - неподвижная платформа с амортизаторами;
8 - крыша вагона;
9 - ЭВМ;
10 - датчик перемещения (горизонтального);
11 - датчик перемещения (вертикального);
12 - преобразователь "длительность сигнала - код" первой видеокамеры;
13 - преобразователь "длительность сигнала - код" второй видеокамеры;
14 - датчик скорости вагона;
15 - преобразователь "напряжение - код".
Работа структурной схемы происходит следующим образом:
В депо перед началом движения, в ЭВМ (9) заносится следующая информация:
- о профиле железнодорожного пути, с указанием контрольных пунктов прохождения вагоном с их расстояниями относительно начала движения;
- о величине высоты контактного электропровода относительно головки рельс, с указанием начальной точки автоматического слежения за геометрическим размером контактного электропровода;
- о месте привязки начала измерения на железнодорожной станции.
Проверяется настройка приводов (5, 6) по управлению подвижной платформы (4), на которой находятся приводы. В свою очередь подвижная платформа установлена на неподвижной (7). Неподвижная платформа вместе с амортизаторами является заимствованной от электровоза - подъемника токосъемника. Для максимальной высоты подвески контактного электропровода неподвижная платформа обеспечивает в изображении на экране видеомонитора среднее положение электропровода. При незначительных колебаниях высоты вагона положение контактного электропровода практически сохраняется, обеспечивая постоянство расстояния контактного электропровода и плоскости видеокамер. При значительных изменениях (туннели, мосты), когда высота меняется на величину до одного метра, удержание электропровода в фокусе видеокамер обеспечивает вертикальный привод (6).
В качестве управляемых приводов (горизонтального и вертикального) используется пневмопривод, состоящий из:
- блока управления;
- цилиндров с электроклапанами, обеспечивающими подачу воздуха в пневмоцилиндр для возвратно-поступательного движения подвижной платформы.
Выбор пневмоприводов определяется наличием в поезде сжатого воздуха и простотой конструктивного решения.
Проверка приводов проводится в два этапа. На первом этапе проверяется правильность и точность работы приводов путем сравнения информации от датчиков перемещения с информацией ЭВМ о задании смещения подвижной платформы возвратно-поступательного движения.
Второй этап - это комплексный совместно с системой измерения геометрических параметров. Предварительно проверяется и настраивается система измерения. Проверка осуществляется путем сравнения на ЭВМ (9) длительности видеосигналов изображения от обеих видеокамер от образцового контактного электропровода с известным геометрическим размером, устанавливаемым в гнезда на платформе. Сравнение осуществляется как сигналов от каждой видеокамеры между собой, так и с контрольной длительностью. В случае неравенства контрольной величины длительности видеосигнала одного из каналов, путем дистанционного управления фокусировкой и масштабом соответствующей видеокамерой добиваются равенства длительности контрольной величине.
Убирается образцовый контактный электропровод и проводится работа по второму этапу - комплексной проверке работы приводов и системы измерения геометрических размеров. Второй этап заключается в проведении следующих действий:
1. Подъем платформы, при управлении от ЭВМ вертикальным пневмоприводом;
2. Контроль положения штатного контактного электропровода в пространстве с помощью обеих видеокамер, при этом длительности сигналов изображения от обеих видеокамер должны быть равны. При неравенстве длительности ЭВМ управляет горизонтальным приводом, добиваясь такого положения видеокамер относительно контактного электропровода, когда длительности сигналов изображений их сравняются.
Положение контактного электропровода по высоте определяет ЭВМ по положению изображения на видеомониторе. Если изображение объекта в нижней части монитора, то платформу вертикальным приводом опускают вниз до момента, когда изображение объекта на видеомониторе будет посреди экрана. Если изображение на видеомониторе в верхней части экрана, то платформу поднимают вверх.
С этого момента времени ЭВМ обеспечивает непрерывное измерение длительностей видеосигналов изображения, поступаемых с обеих видеокамер, независимо от того, движется данный вагон или нет. ЭВМ осуществляет непрерывно расчет полусуммы и разности длительности сигналов изображения, обеспечивая тем самым по полусумме расчет средней длительности сигнала изображения и его перевод в геометрический размер без записи в память, а по разности сигналов, обеспечивая управление горизонтальным приводом, удерживая контактный электропровод в среднем положении относительно обеих видеокамер. По смещению изображения обеих видеокамер влево или вправо относительно средины видеомонитора ЭВМ управляет вертикальным пневмоприводом, добиваясь смещения видеокамер в такое положение, когда изображение находится в середине монитора.
Начало движения вагона (поезда) не приводит к изменению в логике работы ЭВМ, так как ЭВМ, осуществляя измерение геометрического размера и обеспечивая автоматическое управление положением видеокамер относительно контактного электропровода, находится в режиме ожидания команды "Начало записи".
С приходом команды "Начало записи", "привязанной" к определенному пункту железнодорожной станции (например, выходная стрелка ж.д. вокзала), ЭВМ начинает производить запись в память информации о геометрическом размере контактного электропровода и пути, проходимого вагоном с момента прихода команды "Начало записи" до момента очередного измерения геометрического размера контактного электропровода.
Вычисление пути производится путем интегрирования скорости, снимаемой с датчика скорости (14) и преобразователя "напряжения - код". В качестве датчика скорости может быть использован как штатный датчик скорости поезда, так и, например, датчик числа оборотов от вала колес вагона типа ВТ-1850. Для последнего варианта, имея количество оборотов в секунду - К, имея точное значение периметра колеса данной оси - С, а так же интервал между измерениями - Т, ЭВМ рассчитывает величину пути по выражению:
где S - путь, проходимый вагоном с момента подачи команды "Начало записи" до очередного цикла измерения (м);
i - номер цикла измерения;
К - число оборотов в секунду вала колесной пары вагона;
С - точное значение периметра колеса (м);
Т - интервал времени между измерениями, проводимыми ЭВМ (секунда).
При использовании в качестве датчика скорости штатного прибора поезда напряжение с выхода датчика поступает на преобразователь "напряжение - код", выполненного, например, на аналого-цифровом преобразователе типа К572ПВ1 или К1113 ПВ1. ЭВМ интегрирует скорость и определяет величину перемещения:
где S - путь, проходимый вагоном, м;
V - текущая скорость, м/с;
Т - текущее время, с.
ЭВМ, имея в каждом цикле измерения геометрический размер контактного электропровода и путь с момента начала записи, осуществляет их взаимную привязку и запоминание. Записанная в процессе движения вагона информация (геометрический размер и путь) обрабатывается в лабораторных условиях после возвращения вагона-лаборатории на место базирования.
Таким образом, рассмотрены существенные признаки предложенного способа измерения двумя видеокамерами геометрических параметров протяженного объекта на примере электрического контактного провода железной дороги, позволяют производить высокоточные измерения геометрических параметров протяженного объекта при его криволинейном исполнении и при больших скоростях взаимных перемещений объекта измерения и самого измерителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 1999 |
|
RU2166183C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ СТРЕЛЫ ПРОВЕСА ВОЛОКОННО-ОПТИЧЕСКИХ КАБЕЛЕЙ (ВОК), ПОДВЕШЕННЫХ НА ОПОРАХ КОНТАКТНОЙ СЕТИ | 2007 |
|
RU2342261C1 |
| СПОСОБ ЮСТИРОВКИ НАПРАВЛЕНИЯ ВИЗИРНОЙ ОСИ ДВУХКАМЕРНОЙ ТЕЛЕВИЗИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275750C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОНТАКТНОГО ПРОВОДА ЭЛЕКТРОТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2689564C1 |
| Телевизионное устройство для измерения профиля детали | 1989 |
|
SU1755049A1 |
| Телевизионный способ измерения геометрических размеров крупногабаритных объектов | 1990 |
|
SU1820208A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ НАПРАВЛЕНИЯ ВИЗИРНОЙ ОСИ ДВУХКАМЕРНОЙ ТЕЛЕВИЗИОННОЙ СИСТЕМЫ | 2005 |
|
RU2298883C2 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ БОЕВОГО ДИСТАНЦИОННО-УПРАВЛЯЕМОГО МОДУЛЯ И ТРАНСФОРМИРУЕМЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2603177C9 |
| СПОСОБ КОНТРОЛЯ ЦЕНТРИРОВКИ ЛИНЗ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2035712C1 |










Способ измерения геометрических параметров протяженного объекта видеокамерой при относительном линейном перемещении объекта и видеокамеры путем ориентации корпуса видеокамеры вокруг ее продольной оси относительно номинального положения на угол 90o, при котором линии строчной развертки в изображении видеокамеры перпендикулярны направлению перемещения объекта, и оптическую ось видеокамеры ориентируют перпендикулярно линии перемещении объекта и относительно плоскости горизонта на 20-25o объективом вверх и на объект, с обработкой результатов на компьютере. Также измерения производят одновременно второй видеокамерой, размещенной симметрично первой относительно вертикальной плоскости, пересекающей в месте измерений середину протяженного объекта вдоль и в случае изгиба протяженного объекта осуществляют дополнительные независимые перемещения видеокамер по вертикальному и горизонтальному направлениям. Технический результат - высокоточное измерение геометрических параметров криволинейного протяженного объекта. 20 ил.
Способ измерения геометрических параметров протяженного объекта, например, электрического контактного провода железной дороги, видеокамерой при относительном линейном перемещении объекта и видеокамеры путем ориентации корпуса видеокамеры вокруг ее продольной оси относительно номинального (рабочего) положения на угол 90°, при котором линии строчной развертки в изображении видеокамеры перпендикулярны направлению перемещения объекта, и оптическую ось видеокамеры ориентируют перпендикулярно линии перемещения объекта и относительно плоскости горизонта на 20-25° объективом вверх и на объект с обработкой результатов измерений на компьютере, отличающийся тем, что измерения производят одновременно второй видеокамерой, размещенной симметрично первой относительно вертикальной плоскости, пересекающей в месте измерений середину протяженного объекта вдоль, и при этом в случае изгиба протяженного объекта, осуществляют дополнительные независимые перемещения видеокамер по вертикальному и горизонтальному направлению.
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 1999 |
|
RU2166183C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ЗИГЗАГА КОНТАКТНОГО ПРОВОДА | 2000 |
|
RU2167773C1 |
| DE 19634060 C1, 22.01.1998. | |||

