Изобретение относится к измерительной технике и может быть использовано в системах технического зрения, в частности в аппаратуре контроля геометрических размеров объектов.
Целью изобретения является повышение точности измерений за счет предельного увеличения противоположных линий контура измеряемого объекта и преобразования измерительных точек линий контура из системы координат плоскостей анализа видеокамер в систему координат, связанную с измеряемым объектом.
При анализе известных технических решений не обнаружены решения, имеющие признаки, сходные с совокупностью признаков заявляемого.
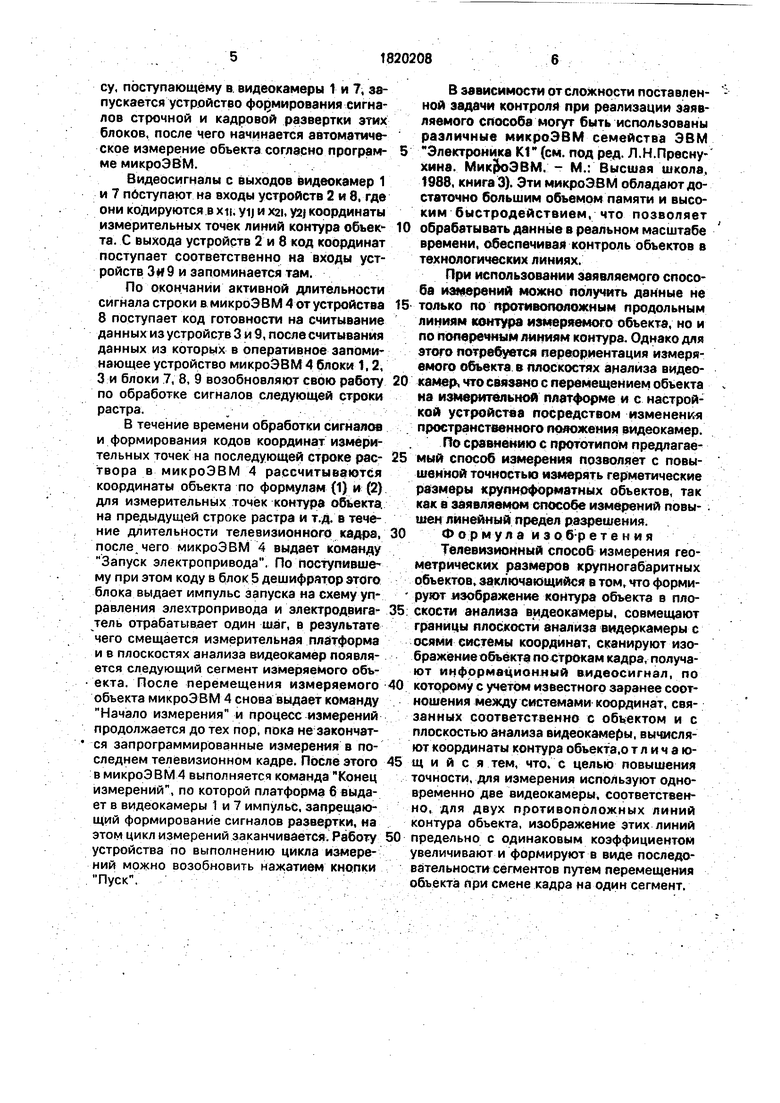
На фиг.1 представлены измеряемый объект, система координат (X, Y) измеряемого объекта, две плоскости анализа видеокамер для противоположных линий контура измеряемого объекта и соответствующие плоскостям анализа системы координат (XL yi) и (х2, yz): на фиг.2 представлена структурная схема устройства, осуществляющего данный способ измерений.
По предлагаемому телевизионному епо-, собу измерения геометрических размеров крупногабаритных объектов осуществляют предельное увеличение противоположных линий контура измеряемого объекта в двух плоскостях анализа видеокамер, причем каждая плоскость анализа имеет свою прямоугольную систему координат, каждую ви00
ю о ю о
00
деокамеру размещают над одной из противоположных линий контура, измеряемый объект ориентируют в плоскостях анализа так, что при его перемещении в процессе измерений анализируемые противоположные линии контура .не выходят за пределы плоскостей анализа видеокамер.
В результате размещения видеокамер над противоположными линиями контура и ориентированного перемещения объекта измерений стало возможным предельное увеличение противоположных линий контура объекта, что позволяет с высокой точностью определять координаты измерительных точек на линиях контура в системе координат плоскостей анализа видеокамер.
В изображениях линий контура измеряемого объекта содержится информация о форме линий и о протяженности линий контура по длине измеряемого объекта, но полностью отсутствует информация о расстоянии между линиями контура, т.е. отсутствует информация о поперечных размерах измеряемого объекта. Поэтому для восстановления информации о поперечных размерах объекта вводят прямоугольную систему координат (X, Y), связанную с измеряемым объектом. Положение плоскостей анализа видеокамер фиксируют в системе координат (X, Y) до начала измерений, а в процессе измерений преобразуют координаты измерительных точек из систем координат (XL yi) и (х2, уа) в систему координат (X, Y), по которым возможно точное измерение любых линейных размеров объекта, так как в Xi, YI координатах измерительных точек контура содержится полная информация о линейных размерах объекта.
Для осуществления преобразования координат удобно оси системы координат (xi, yi) совместить с осями системы координат (X, Y), тогда преобразованная координата измерительной точки Хц тождественна координате Х11, что сокращает вычислительный аспект преобразований. Так как при стартстопном перемещении объекта измерений, возможно совмещение границы окончания изображения объекта в предыдущем кадре с границей начала изображения объекта в последующем кадре, то координату Yij вычисляют по формуле
Yij YK+yij,
О)
где YIJ - координата измерительной точки контура объекта-в текущем кадре;
,2,3...n - последовательность чисел, определяемая количеством линий растра;
YK - координата границы контура измеряемого объекта в предыдущем кадре;
,1,2,3,...т - последовательность чисел, определяемая количеством кадров;
yij координата измерительной точки контура измеряемого объекта в текущем кадре в системе координат (xi, yi).
Ось Х2 системы координат (ха. У2) удобно совместить с осью X системы координат (X,
у), а ось у2 - с линией постоянного смещения плоскости анализа видеокамеры, связанной с системой координат (ха, уа). Координату Хо определяют до начала измерений. Координату Xai измерительной точки
линии контура, определяемую с помощью, плоскости анализа в системе координат (ха, уа), вычисляют по формуле
20
Х21 Хо+Х2|,
(2)
где Х0 - координата линии в системе координат (X, Y), с которой совмещают ось уа системы координат (х2, уа);
-X2I - координата измерительной точки линии контура, измеряемой в системе координат (ха, уа);
,2,3,...N - последовательность чисел, определяемая количеством дискрет в сигнале строки видеокамеры.
Координату контура Yaj вычисляют по формуле (1) с подстановкой в нее координаты уа измерительных точек.
Кодирование видеосигналов достаточно хорошо изложено в литературе (см., на- пример, авторское свидетельство СССР № 1238117, кл.С 06 К 9/00, 15/06.86).
Устройство, осуществляющее предлага- емый способ, (фиг.2) содержит видеокамеру 1, устройство 2 обработки видеосигналов, буферное запоминающее устройство 3, мик- роЭВМ 4, блок 5 - дешифратор и схема управления электроприводом, измерительную платформу 6, видеокамеру 7, устройство 8 обработки видеосигналов и буферное запоминающее устройство 9.
Устройство работает следующим образом,
При нажатии кнопки Пуск на пульте управления микроЭВМ 4от таймера послед- ней в устройства 3. 2, 8 и 9, а также в виде- окэмеры начинает поступать последовательность тактовых импульсов, по которым осуществляется синхронизация работы этих блоков. Управление процессом измерения идет от микроЭВМ 4.
По команде микроЭВМ Начало измерения на вход блока 5 поступает код, который преобразуется дешифратором этого блока в обнуляющий импульс для счетных элемен- jrpe устройств 2,3, 8 и 9. По этому же импульсу, поступающему в видеокамеры 1 и 7, запускается устройство формирования сигналов строчной и кадровой развертки этих блоков, после чего начинается автоматиче- ское измерение объекта согласно програм- ме микроэвм..
Видеосигналы с выходов видеокамер 1 и 7 листупают на входы устройств 2 и 8, где они кодируются в Х1|, yij и X2I, У2) координаты измерительных точек линий контура объек- та. С выхода устройств 2 и 8 код координат поступает соответственно на входы устройств Зи 9 и запоминается там.
По окончании активной длительности сигнала строки в микроЭВМ 4 от устройства 8 поступает код готовности на считывание данных из устройств 3 и 9, после считывания данных из которых в оперативное запоминающее устройство микроЭВМ 4 блоки 1,2, 3 и блоки 7; 8, 9 возобновляют свою работу по обработке сигналов следующей строки растра.
В течение времени обработки сигналов и формирования кодов координат измерительных точек на последующей строке рас- твора в микроЭВМ 4 рассчитываются координаты объекта по формулам (1) и (2) для измерительных точек контура объекта, на предыдущей строке растра и т.д. в течение длительности телевизионного кадра, после чего микроЭВМ 4 выдает команду Запуск электропривода. По поступившему при этом коду в блок 5 дешифратор этого блока выдает импульс запуска на схему управления электропривода и электродвига- тель отрабатывает один шаг, в результате чего смещается измерительная платформа и в плоскостях анализа видеокамер появляется следующий сегмент измеряемого объекта. После перемещения измеряемого объекта микроЭВМ 4 снова выдает команду Начало измерениями процесс измерений продолжается до тех пор, пока не закончатся запрограммированные измерения в последнем телевизионном кадре. После этого в микроЭВМ 4 выполняется команда Конец измерений, по которой платформа 6 выдает в видеокамеры 1 и 7 импульс, запрещающий формирование сигналов развертки, на этом цикл измерений заканчивается. Работу устройства по выполнению цикла измерений можно возобновить нажатием кнопки Пуск.
В зависимости от сложности поставленной задачи контроля при реализации заявляемого способа могут быть использованы различные микроЭВМ семейства ЭВМ Электроника КГ (см. под ред. Л.Н.Пресну- хина. МикрЧ ЭВМ. - М.: Высшая школа, 1988, книга 3). Эти микроЭВМ обладают достаточно большим объемом памяти и высоким быстродействием, что позволяет обрабатывать данные в реальном масштабе времени, обеспечивая контроль объектов в технологических линиях.
При использовании заявляемого способа измерений можно получить данные не только по противоположным продольным линиям контура измеряемого объекта, но и по поперечным линиям контура. Однако для этого потребуется переориентация измеряемого объекта, в плоскостях анализа видеокамер, что связано с перемещением объекта на измерительной платформе и с настройкой устройства посредством изменения пространственного положения видеокамер.
По сравнению с прототипом предлагаемый способ измерения позволяет с повышенной точностью измерять герметические размеры крупноформатных объектов, так как в заявляемом способе измерений повышен линейный предел разрешения.
Формул а изо6:рете ния
Телевизионный способ измерения геометрических размеров крупногабаритных объектов, заключающийся в том, что формируют изображение контура объекта в плоскости анализа видеокамеры, совмещают границы плоскости анализа видеокамеры с осями системы координат, сканируют изображение объекта по строкам кадра, получают информационный видеосигнал, по которому с учетом известного заранее соотношения между системами координат, связанных соответственно с объектом и с плоскостью анализа видеокамеры, вычисляют координаты контура объекта,о т л и ч a tout и и с я тем, что. с целью повышения точности, для измерения используют одновременно две видеокамеры, соответственно, для двух противоположных линий контура объекта, изображение этих линий предельно с одинаковым коэффициентом увеличивают и формируют в виде последовательности сегментов путем перемещения объекта при смене кадра на один сегмент.
х
Фиг.1

Изобретение относится к измерительной технике. Целью изобретения является повышение точности за счет увеличения изображения линий контура объекта при его посегментном формировании и компенсации ошибок при позиционировании объекта по оси, перпендикулярной направлению его г перемещения. Предельно увеличенное изображение сегментов левой и правой линий контура объекта в плоскостях анализа соответственно левой и правой видеокамер сканируют по строкам кадра. При смене кадра объект перемещают на один сегмент. По полученному видеосигналу вычисляют координаты линий контура объекта. Посегмент- ное формирование позволяет получить предельно увеличенное изображение и тем повысить точность. Случайное смещение объекта перпендикулярно направлению его перемещения не снижает точность, так как такое смещение изображения в плоскости анализа одной из видеокамер компенсируется соответствующим смещением изображения в плоскости анализа другой видеокамеры. 2 ил. - j . ё
| Горелик С.Л., Кац Б.М., Киврин В.И | |||
| Телевизионные измерительные системы | |||
| М.: Связь, 1980, с.19- 152 |
