Изобретение относится к дистанционному контролю и измерению с подвижного состава стрелы провеса волоконно-оптических кабелей (ВОК), подвешенных на опорах контактной сети (КС) железных дорог.
В настоящее время для определения стрелы провеса ВОК, подвешенного на опорах контактной сети, используются специальные измерительные штанги, теодолиты, лазерные дальномеры (Технологические карты для выполнения работ по технической эксплуатации волоконно-оптических линий передачи федерального железнодорожного транспорта, М., Трансиздат, 2002 г.). Применяемые устройства и приспособления для измерения стрелы провеса вручную обуславливают низкую производительность труда и большие межпроверочные интервалы. В результате сезонных колебаний температуры возможны нарушения допустимых норм стрелы провеса и, как следствие, в случае ее несвоевременного измерения - нарушение целостности ВОК.
Известно устройство для измерения высоты и зигзага контактного провода, которое размещено в подвижном транспортном средстве перед наклонным лобовым стеклом так, чтобы оптическая ось оптической системы была перпендикулярна контактному проводу. Размер лобового стекла и угол его наклона такие, чтобы контактный провод при всех его положениях не выходил за поле обзора оптической системы. В устройство дополнительно введены блок вычисления высоты контактного провода, блок коррекции погрешности измерения зигзага в зависимости от высоты контактного провода, левое и правое большие зеркала, левое и правое малые зеркала (RU 2180622, 20.03.2002).
Из патента JP 10044997, 17.02.1998, известно контролирующее устройство положения воздушного контактного провода, содержащее расположенную на крыше поезда камеру для снятия состояния натяжения противоположного провода двухколейного пути, процессор контроля состояния натяжения провода, выходной блок изображения, передающий изображение на дисплее операционной системы, и радиопередатчик, посылающий информацию на станцию.
Наиболее близким аналогом заявленного изобретения является устройство для измерения параметров контактного провода, содержащее осветитель, оптически сопряженный через контактный провод с блоками приема, первичной обработки, анализа и отображения информации. Осветитель выполнен линейным и снабжен отражателем, блок приема информации состоит по меньшей мере из двух оптоэлектронных головок, каждая из которых содержит оптическую систему в виде объектива и интегральную многоэлементную фотоприемную матрицу. Блок первичной обработки информации содержит блок выделения и усиления видеосигнала, вход которого соединен с выходом интегральной многоэлементной фотоприемной матрицы, а выход - с блоком формирования информационного сигнала, второй вход которого соединен с первым выходом блока развертки, вход которого соединен с выходом интегральной многоэлементной фотоприемной матрицы, выход блока формирования информационного сигнала соединен с первым входом блока сопряжения, выход которого соединен с блоком анализа и отображения информации, в качестве которого использован компьютер (RU 2137622, 20.09.1999).
Недостатками вышеперечисленных устройств являются:
- высота подвески контактного провода измеряется непосредственно над транспортным средством;
- с применением данных устройств не представляется возможным выполнить измерения высоты подвески ВОК или других проводов и кабелей, размещаемых не над подвижным составом, а с боку его на опорах КС;
- небольшое расстояние от датчика измерения высоты подвески до контактного провода.
Задачей изобретения является создание устройства дистанционного автоматизированного контроля стрелы провеса ВОК, подвешенных на опорах контактной сети, установленного на движущемся подвижном составе и обеспечивающего получение технического результата, состоящего в возможности измерения стрелы провеса ВОК, подвешенных на опорах КС, за счет учета высоты подвески ВОК, смещения его горизонтальной проекции относительно железнодорожного пути и перемещения системы координат, привязанной к вагону, а также в сокращении трудозатрат при выполнении технологического процесса «Измерение стрелы подвеса ВОК» более чем в 100 раз за счет размещения устройства на подвижном составе.
Данный технический результат достигается в заявленном устройстве дистанционного автоматизированного контроля стрелы провеса ВОК, подвешенных на опорах контактной сети железных дорог, содержащем информационно-вычислительный комплекс с микропроцессорными контроллерами для первичной обработки данных, один из которых через мультиплексор для объединения потоков первичных данных с низкой информационной скоростью соединен с комплексом датчиков систем измерения, второй микропроцессорный контроллер принимает от стереотелевизионной системы информацию и обрабатывает ее с выделением сигналов от интересующих объектов, третий микропроцессорный контроллер связан с видеотелевизионной системой и синхронизует ее со стереотелевизионной системой.
Комплекс датчиков систем измерения содержит: датчик гировертикали, датчики вертикальных перемещений кузова вагона, датчик пройденного пути и датчик температуры.
Видеотелевизионная система содержит: видеомагнитофон, видеокамеры, телевизионный монитор и систему управления видеомагнитофоном от информационно-вычислительного комплекса, предназначенную для видеорегистрации наблюдаемых объектов с привязкой к пройденному пути.
Стереотелевизионная система содержит: видеокамеры на базе прибора с зарядовой связью линеек с повышенной разрешающей способностью и чувствительностью, телевизионный мультиплексор и систему освещения волоконно-оптических кабелей.
Сущность заявленного устройства поясняется чертежами:
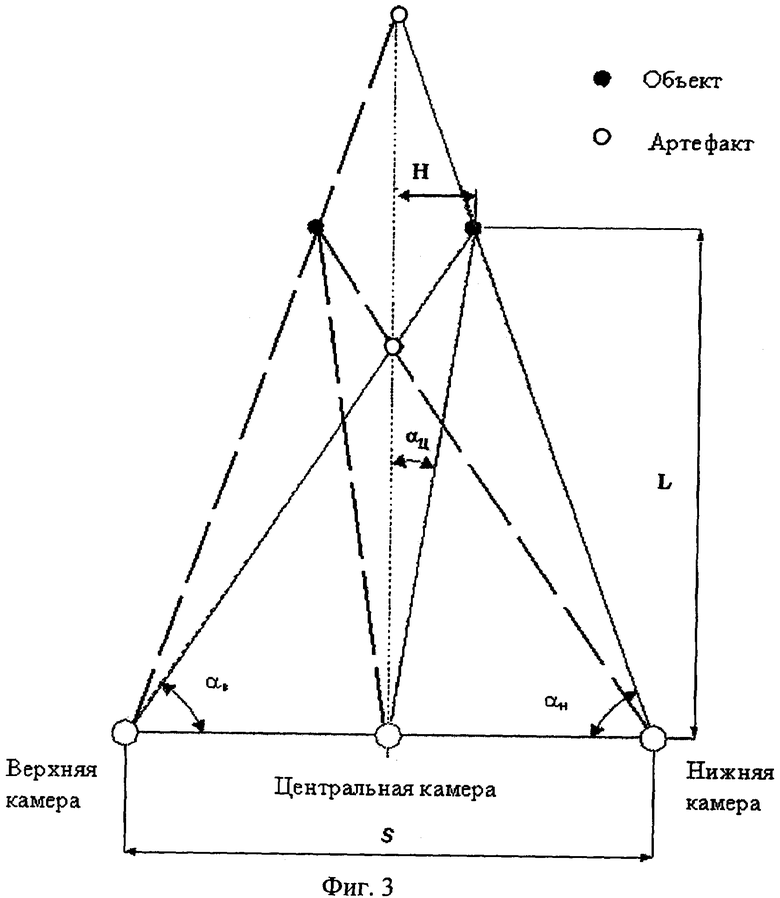
на фиг.1 отображена схема устройства дистанционного автоматизированного контроля стрелы провеса ВОК, подвешенных на опорах контактной сети; на фиг.2 - углы наклона вагона; на фиг.3 - схема выявления и отбрасывания ложных объектов (артефактов).
Устройство дистанционного автоматизированного контроля стрелы провеса ВОК, подвешенных на опорах контактной сети (фиг.1), содержит:
- управляющую ЭВМ 1 с рабочим местом оператора информационно-вычислительного комплекса (ИВК), в слоты системной шины ISA которой вставлены микропроцессорные контроллеры 5, 6 и 7 на базе сигнальных процессоров ADSP 21XX - 3 шт. ИВК выполнен на базе промышленного компьютера Advantech 610, содержащего системный блок (не показан на чертеже), видеомонитор 2, клавиатуру 3 и принтер 4;
- мультиплексор данных 8, предназначенный для объединения потоков первичных данных с низкой информационной скоростью;
- комплекс датчиков систем измерения 19, содержащий датчики гировертикали 9, два датчика вертикальных перемещений кузова вагона 10 и 11 (предназначенные для измерения вертикальных перемещений кузова вагона во время движения с целью компенсации боковой качки вагона и галопирования), датчик пройденного пути 12 (предназначенный для регистрации пройденного пути при измерении стрелы провеса и используется для привязки текущих измерений стрелы провеса ВОК к пройденному пути), датчик температуры 13 (предназначенный для измерения температуры окружающего воздуха с целью определения допустимой стрелы провеса ВОК);
- видеотелевизионную систему 14 в составе видеомагнитофона 17, видеокамеры 15, телевизионного монитора 16 и системы управления видеомагнитофоном (не показана) от ИВК, предназначенную для видеорегистрации наблюдаемых объектов с привязкой к пройденному пути;
- стереотелевизионную систему 18 (СТВС) для измерения стрелы провеса в составе: четыре видеокамеры на базе прибора с зарядовой связью (ПЗС) линеек с повышенной разрешающей способностью и чувствительностью, телевизионный мультиплексор, систему освещения ВОК (не показаны).
Устройство дистанционного автоматизированного контроля стрелы провеса ВОК, подвешенных на опорах контактной сети, имеет программное обеспечение, в которое входит: программа калибровки стереотелевизионной системы; программа записи телевизионного изображения; программа вторичной обработки данных и измерения стрелы провеса.
Информационно-измерительный комплекс обеспечивает:
- привязку процесса измерений к конкретному участку пути перегона или станции, к конкретным пролетам между соседними опорами КС с указанием номеров опор и протяженности пролета;
- сохранение результатов измерения и контроля первичных контролируемых параметров с привязкой к координатам пути и времени на момент измерения;
- измерение стрелы провеса и сравнение полученных данных с нормативными с учетом температуры окружающего воздуха;
- измерение высоты подвески ВОК от уровня поверхности головки рельса (УГР) до места закрепления ВОК и до точки наибольшего его провисания;
- измерение длины пролета и расстояния вдоль пути от начала пролета до точки наибольшего провисания ВОК;
- измерение боковой качки вагона и галопирования, вертикальных перемещений кузова вагона во время движения и компенсацию этих перемещений;
- анализ достоверности измеренных данных и выделение участков подвески ВОК, требующих анализа оператора;
- вывод результатов измерений стрелы провеса ВОК на монитор в реальном масштабе времени в процессе проведения измерений;
- архивирование данных по стреле провеса с целью сравнения результатов измерений, полученных в разное время;
- общее управление системой, оперативный и диагностический контроль всех параметров, тестирование системы в целом или ее элементов до момента поездки или в ходе ее, оперативную корректировку параметров датчика пути в интерактивном или автоматическом режимах.
Микропроцессорные контроллеры 5, 6 и 7 производят первичную обработку информации от комплекса датчиков системы измерения 19. Микропроцессорный контроллер 5 через мультиплексор 8 связан с датчиками гировертикали 9, вертикальных перемещений вагона 10 и 11, датчиком температуры 13 и датчиком пути 12. Гировертикаль 9 и датчики вертикальных перемещений вагона 10 и 11 необходимы для пересчета относительных координат обнаруженных объектов относительно кузова вагона к независимой системе координат, привязанной к оси пути. Датчик пройденного пути 12 необходим для привязки данных измерений к конкретным элементам контактной сети (опорам). Датчик температуры 13 необходим для учета зависимости допустимой стрелы провеса ВОК от температуры окружающего воздуха.
Микропроцессорный контроллер 7 осуществляет управление работой СТВС 18, принимает от СТВС 18 оцифрованное изображение и обрабатывает его, выделяя сигналы от интересующих объектов (элементов контактной подвески и ВОК). Выделение сигналов от ВОК, построение траектории его провеса и измерение стрелы провеса осуществляется в ЭВМ.
Микропроцессорный контроллер 6 управляет работой видеокамеры 15 и видеомагнитофона. 17, синхронизируя их с работой СТВС 18, что позволяет при необходимости вести синхронную запись видеоизображения элементов контактной подвески и ВОК на видеомагнитофон и данных измерительной системы на жесткий диск центральной ЭВМ. При наличии цифровой видеокамеры и кодера сжатия телевизионного сигнала оцифрованное и сжатое видеоизображение можно также записывать в виде единого программного потока в формате DVB на жесткий диск.
Измерение высоты подвески ВОК производится с учетом смещения горизонтальной проекции ВОК относительно железнодорожного пути, для чего используется СТВС 18. Кроме этого учитывается перемещение системы координат, привязанной к вагону, в которой работает СТВС 18, относительно железнодорожного пути при боковых и продольных качках вагона во время движения. На фиг.2 показано, что без учета угла наклона вагона α, который состоит из угла наклона рельсов γ и угла наклона корпуса вагона относительно головок рельс β, измеренная высота hi ВОК, определяемая углом зрения φ СТВС 18 относительно кузова вагона, будет значительно отличаться от истинной высоты h. Для этого в состав измерительного комплекса введены датчики вертикальных перемещений кузова вагона 10 и 11, которые позволяют учесть вертикальные перемещения СТВС 18 при продольной качке и "галопировании" вагона, и гировертикаль 9 на базе лазерного гироскопа ГЛ-1 для учета полного угла α бокового наклона кузова.
В основу работы измерительной телевизионной системы положен стереоскопический принцип определения положения объекта (ВОК) в пространстве, основанный на измерении углового положения (угла визирования) объекта относительно осей оптических систем двух разнесенных в пространстве на некоторое базовое расстояние телевизионных камер. При этом оси оптических систем всех камер сориентированы так, что лежат в одной вертикальной плоскости, перпендикулярной направлению движения вагона. Поля зрения оптических приемников камер с фоточувствительными ПЗС линейками повернуты так, что лежат в той же плоскости.
Начало лучей визирования ВОК каждой камерой определяется положением некоторой узловой точки в центре входного зрачка объектива оптической системы камеры. Узловые точки телевизионных камер размещаются на одной вертикальной линии поперек боковой поверхности вагона на расстоянии S (базовое расстояние) друг от друга (фиг.3).
Для борьбы с ложными объектами используется система из трех камер, причем узловая точка центральной камеры размещается симметрично относительно узловых точек верхней и нижней камер. Измеренные значения углов визирования ВОК крайними камерами αв (верхняя камера) и αн (нижняя камера) при известном базовом расстоянии S позволяют вычислить горизонтальное смещение L ВОК от линии, соединяющей узловые точки камер (базы ТВ системы) и его вертикальное смещение Н относительно середины базы СТВС.
Для выявления и отбрасывания ложных объектов, возникающих в точках пересечения лучей визирования при нахождении в полях зрения камер СТВС более одного объекта, предназначена центральная камера. Процедура обнаружения истинного объекта строится на решающем правиле:

где αц - угол визирования объекта центральной камерой телевизионной системы; Δ - допуск на неточность сведения камер; значение статистики ϕ=1 означает обнаружение объекта.
Сигнально-помеховая обстановка при обнаружении ВОК и измерения параметров его подвеса значительно сложнее, чем в задачах обнаружения контактного провода. Это связано с несколькими причинами.
1. В отличие от контактного провода, который является самым нижним объектом контактной сети, место расположения ВОК заранее неизвестно. Это приводит к тому, что нет достаточно четкого координатного признака для различения ВОК и других проводов и кабелей, подвешенных на опорах КС.
2. В поле зрения камер СТВС, кроме ВОК, во время движения вагона попадает все время разное количество других мешающих проводов, имеющих различные диаметры, кроме этого на задний фон кадра могут попадать близко расположенные строения и деревья, спектральный состав сигналов от которых слабо отличается от спектра полезных сигналов от ВОК.
Эти проблемы разрешаются за счет усложнения алгоритма обработки сигналов от всех трех камер. Причем в этот комплекс обработки входят алгоритмы фильтрации непосредственно сигналов от каждой из камер, а также алгоритмы совместной взаимокорреляционой обработки сигналов от различных камер.
Телевизионная камера построена на основе линейного прибора с зарядовой связью ILX703 с электронным затвором и фотографическим объективом МИР-1В. Сочетание этих устройств обеспечивает измерения в требуемом диапазоне углов наблюдения, равном ˜40°.
Микропроцессорные контроллеры 5, 6 и 7 включают в себя постоянное запоминающее устройство, содержащее программу монитора, поддерживающего загрузку рабочей программы во внутреннюю память программ процессора через один из последовательных каналов от микропроцессорного контроллера (5, 6, 7). В контроллеры 5, 6 и 7 программа загружается из управляющей ЭВМ рабочего места оператора.
В каждом микропроцессорном контроллере 5, 6, 7 предварительной обработки информации предусмотрен "сторожевой" таймер, исключающий возможные "зависания" процессора. Для связи используется канал последовательного формата SPORT с применением стандарта RS422 для повышения помехоустойчивости. Кроме этого в структуру платы включен высокоскоростной выходной каскад с оптоэлектронным передатчиком для реализации высокоскоростного асинхронного интерфейса передачи видеоизображения. Кодер данного интерфейса, включающий в себя схему формирования транспортных пакетов и синхронный скремблер, реализован на программируемой логической интегральной схеме ALTERA. Скремблирование информации необходимо для обеспечения устойчивой работы схемы тактовой синхронизации на приемной стороне, а пакетная передача данных позволит восстановить кадровую и байтовую синхронизацию.
Программное обеспечение микропроцессорного контроллера поддерживает управление аналоговой частью камеры. С помощью встроенного таймера производится выработка импульса управления электронным затвором ПЗС фотоприемника.
Целью разработки опытного программного обеспечения (ПО) - является исследование различных алгоритмов первичной обработки записанных видео сигналов обработки с целью оптимизации процедур обнаружения подвешенных проводов и кабелей, на опорах контактной сети.
Программа считывает с диска данные, записанные ранее во время экспериментальных поездок. Далее после настройки режимов фильтрации и обнаружения происходит обработка записанных видеоданных, синтезируется изображение кадра, построенного за счет проезда вагона, и на этом кадре отображаются обнаруженные на первом этапе объекты.
Для надежного различения сигналов от подвешенных проводов других элементов контактной сети и мешающих объектов, находящихся на заднем фоне, необходимо использовать информацию о протяженности полезных объектов, т.е. вести обработку на ряде последовательных строк телевизионного изображения по каждой камере СТВС.
Задача разделяется на несколько этапов.
На первом этапе происходит обработка сигнала каждой строки непосредственно в каждой камере. Задачей обработки на этом этапе является наилучшее подавление мешающих сигналов от заднего фона и выделение сигналов от проводов. Основное требование к алгоритму обработки на данном этапе - устойчивость его статистических характеристик (вероятности пропуска сигнала и вероятности ложного обнаружения) в различных условиях приема.
На втором этапе обработки по последовательным статистикам обнаруженных на первом этапе сигналов осуществляется восстановление траектории провеса проводов. На этом этапе происходит удаление всех лишних обнаруженных на первом этапе объектов. Для восстановления траектории должна использоваться информация о корреляционных свойствах полезных сигналов от проводов на соседних строках.
На третьем этапе из восстановленных траекторий выделяется траектория интересующего объекта (ВОК). Непосредственно по такой траектории нельзя с достаточной точностью вычислить стрелу провеса ВОК, поскольку она будет искажена пропусками сигнала в отдельных точках траектории, неправильными отчетами, возможны остаточные ошибки вычисленного положения провода из-за динамических и статических ошибок датчиков вертикальных перемещений вагона и бокового наклона кузова. Поэтому на этом этапе должна быть проведена статистическая обработка траектории, целью которой является привязка к измеренной траектории теоретической кривой провеса ВОК. В качестве математической модели провеса ВОК можно использовать уравнение цепной линии (форму цепной линии принимает гибкая тяжелая нерастяжимая нить, подвешенная в двух точках). Для статистической обработки можно использовать метод наименьших квадратов.
Устройство обеспечивает:
- измерение стрелы провеса одного ВОК как в светлое, так и в темное время суток при разных вариантах подвески с точностью ±10 см;
- измерение пройденного пути при измерении стрелы провеса с погрешностью 1 м на 1 км пути;
- измерение стрелы провеса при скорости движения до 90 км/ч с погрешностью измерения 1 км/ч.
Измерение стрелы провеса производится при температуре окружающего воздуха от минус 50°С до плюс 55°С и при высоте подвески ВОК от УТР от 4,0 до 7,5 м и размещении ВОК как с правой, так и с левой стороны пути без перестановки оборудования.
В устройстве применяются:
- устойчивые к аномальным ошибкам алгоритмы обработки данных;
- алгоритмы обработки данных, обеспечивающие выводы результатов измерений в реальном масштабе времени в процессе измерений;
- система паспортизации участков подвески ВОК.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАГОН-ЛАБОРАТОРИЯ ИСПЫТАНИЙ КОНТАКТНОЙ СЕТИ | 2023 |
|
RU2806925C1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1997 |
|
RU2108936C1 |
| Система диагностики и удаленного мониторинга усилия натяжения проводов и тросов контактной сети железной дороги | 2016 |
|
RU2631891C1 |
| Система и способ непрерывного мониторинга состояния контактной сети рельсового транспорта | 2018 |
|
RU2701887C1 |
| УСТРОЙСТВО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ И ПОДВИЖНОГО СОСТАВА В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2016 |
|
RU2624365C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО НА ЖЕЛЕЗНОДОРОЖНОМ ХОДУ | 1998 |
|
RU2152469C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ЗИГЗАГА КОНТАКТНОГО ПРОВОДА | 2000 |
|
RU2167773C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ВЫСОТЫ КОНТАКТНОГО ПРОВОДА | 2000 |
|
RU2180621C2 |

Изобретение относится к дистанционному контролю и измерению с подвижного состава стрелы провеса волоконно-оптических кабелей. Устройство содержит информационно-вычислительный комплекс с микропроцессорными контроллерами для первичной обработки данных, один из которых через мультиплексор для объединения потоков первичных данных с низкой информационной скоростью соединен с комплексом датчиков систем измерения, второй микропроцессорный контроллер принимает от стереотелевизионной системы информацию и обрабатывает ее с выделением сигналов от интересующих объектов, третий микропроцессорный контроллер связан с видеотелевизионной системой и синхронизует ее со стереотелевизионной системой. 3 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОНТАКТНОГО ПРОВОДА | 1997 |
|
RU2137622C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОТЯЖЕННОГО ОБЪЕКТА | 2002 |
|
RU2224981C1 |
| Устройство для измерения износа контактного провода | 1980 |
|
SU921900A1 |
| DE 19634060 C1, 22.01.1998. | |||

