Изобретение относится к военной технике и может найти применение как в общем машиностроении, так и в конструкциях следящих приводов, передающих большие нагрузки (механизмы поворота башни танков, боевых машин пехоты, зенитных самоходных и корабельных установок и др.).
Известный механизм поворота башни танка Т-55 [1] служит для обеспечения вращения башни от электродвигателя и вручную. Он состоит из электродвигателя, корпуса блока шестерен, планетарного ряда, червяка с червячным колесом, сдающего звена, маховика с рукояткой ручного привода, вертикального вала с шестерней погона и люфтовибирающим устройством, электромагнитной муфты с фрикционом. Механизм поворота башни работает следующим образом. При работе от электродвигателя необходимо застопорить эпицикл. В этом случае червячная пара ручного привода не работает. При включении электродвигателя срабатывает электромагнит муфты, в результате чего происходит расстопорение промежуточных шестерен относительно неподвижной оси.
Вращение от электродвигателя передается на шестерню, блок промежуточных шестерен, венец фрикционной муфты, вал солнечной шестерни, сателлиты, водило с ведущей шестерней, шестерни люфтовыбирающего устройства, которые обкатываются по зубчатому венцу нижнего погона, обеспечивая вращение башни.
Недостаток механизма - ненадежная работа при больших динамических нагрузках. Известный механизм поворота конвейера БМП-1 [2] служит для перемещения гнезд конвейера и для фиксирования очередного гнезда с выстрелом на исходной позиции для заряжания. Механизм воспринимает большой динамический момент, возникающий при повороте неуравновешенного конвейера.
Механизм поворота конвейера состоит из электродвигателя, редуктора, стопорного устройства с электромагнитом и конечным выключателем.
Редуктор механизма состоит из следующих основных частей: корпуса, ведущей и ведомой шестерен, червяка, червячного колеса, сдающего звена, шарикоподшипников и уплотнений. При работе механизма поворота конвейера вращение от электродвигателя передается через ведущую шестерню на ведомую, свободно сидящую на червяке. С ведомой шестерни вращение передается на червяк за счет трения между ведущими и ведомыми дисками сдающего звена. Далее вращение передается на червячное колесо со стопорным диском.
Недостаток привода - ненадежная работа червячной пары при движении БМП из-за больших динамических нагрузок, которые возникают вследствие неуравновешенности конвейера с боеприпасами.
Известна зубчатая передача тягового привода локомотива [3], которая содержит ведущее и ведомое колеса, зацепляющиеся между собой поочередно посредством двух промежуточных колес, подвешенных на рычагах и взаимодействующих между собой. Хвостовик одного рычага выполнен вилкообразным с опорами, размещенными на разном расстоянии от центра поворота рычага. Опоры взаимодействуют с хвостовиком другого рычага поочередно в зависимости от направления передаваемого момента. Данное техническое решение, по мнению авторов, является наиболее близким к заявляемому и выбрано в качестве прототипа. Передача с двумя промежуточными колесами равноценна планетарной с двумя сателлитами. В передаче с двумя промежуточными колесами остается больше места для размещения тягового двигателя, что при росте мощностей имеет большое значение. Вилкообразный хвостовик одного рычага с опорами, размещенными на разном расстоянии от центра поворота рычага, выполняет функции уравнительного механизма, который обеспечивает равномерное распределение усилий между промежуточными колесами при реверсировании вращения двигателя.
Недостатком механизма является наличие крупногабаритных рычагов, на которых подвешены промежуточные колеса, применение которых выводит к увеличению габаритов всего механизма в целом. Этот недостаток ограничивает применение механизма, а именно приводит к невозможности его применения в условиях ограниченного объема боевого отделения танка, БМП и ЗСУ.
Задачей предлагаемого изобретения является расширение области применения механизма, способного воспринимать и передавать большие нагрузки, за счет уменьшения его габаритов.
Задача решается тем, что в механизме поворота, содержащем ведущее и ведомое колеса, зацепляющиеся между собой посредством двух промежуточных колес, на валу ведущего колеса жестко установлены две косозубые шестерни. Шестерни имеют противоположное направление зуба и сцеплены с косозубыми колесами, жестко закрепленными на валах соответствующих промежуточных колес. Вал ведущего колеса выполнен плавающим и подпружиненным в осевом направлении.
Задача также может быть решена с помощью технического решения, в котором механизм поворота содержит ведущее и ведомое колеса, зацепляющиеся между собой посредством двух промежyточных колес. На валу ведущего колеса жестко установлена шевронная шестерня, сцепленная с косозубыми колесами с противоположным направлением зуба. Колеса жестко закреплены на валах соответствующих промежуточных колес. Вал ведущего колеса выполнен плавающим и подпружиненным в осевом направлении.
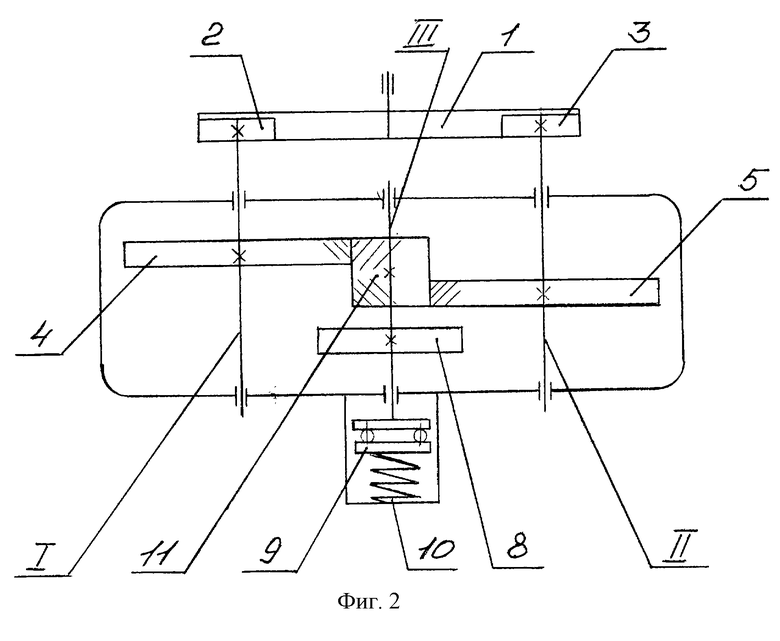
Предлагаемое техническое решение поясняется графическими материалами, где на фиг.1 представлена кинематическая схема механизма поворота, в котором на валу ведущего колеса установлены две косозубые шестерни, а на фиг.2 - шевронная шестерня.
Механизм поворота состоит из ведущего колеса 8 (фиг.1) и ведомого колеса 1, которое может быть либо наружного, либо внутреннего зацепления. Ведомое колесо 1 сцеплено с промежуточными колесами 2 и 3. На валу III ведущего колеса 8 жестко установлены косозубые шестерни 6 и 7 с противоположным направлением зубьев.
Шестерни 6 и 7 сцеплены с косозубыми колесами 4 и 5 соответственно, которые жестко закреплены на валах I и II промежуточных колес 2 и 3. Вал III ведущего колеса 8 выполнен плавающим, что обеспечено применением роликоподшипников без бортов на наружном кольце. Снизу вал III подпружинен пакетом тарельчатых пружин 10, взаимодействующих с упорным подшипником 9.
На фиг.2 представлена кинематическая схема механизма поворота, в котором на валу III жестко установлена шевронная шестерня 11. Шестерня 11 сцеплена с косозубыми колесами 4 и 5, имеющими противоположное направление зуба.
В предлагаемых вариантах механизмов поворота предусмотрено разделение мощностей на два потока, которое происходит на 2-х последних, наиболее нагруженных ступенях. При вертикальном расположении вала III и усилии пакета пружин, компенсирующем вес вала с шестернями 6, 7 и колесом 8 (фиг.1) либо шевронной шестерней 11 и колесом 8 (фиг.2), зацепление работает в качестве уравнительного механизма и удельные нагрузки в зацеплении последних двух ступеней механизма снижаются в два раза. При определенных значениях угла наклона зубьев зубчатых колес 4, 5 и усилии пакета тарельчатых пружин 10 обеспечивается компенсация постоянной и части переменной составляющей боковых зазоров в последних двух ступенях механизма, определяющих основную долю углового люфта кинематической цепи, приведенного к оси нагрузки.
Таким образом, предложенное техническое решение позволяет расширить область применения механизма, позволяющего воспринимать и передавать большие нагрузки.
Источники информации
1. Танк Т-55. Техническое описание и инструкция по эксплуатации. Военное издательство Министерства обороны СССР, г. Москва, 1983 г. - аналог.
2. Боевая машина пехоты БМП-1. Техническое описание и инструкция по эксплуатации, стр. 77, 82, рис.46. Военное издательство Министерства обороны СССР, Москва, 1979 г. - аналог.
3. Авторское свидетельство СССР 329055 от 02.06.70, МПК F 16 H 1/20, B 61 C 9/06 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2014 |
|
RU2547669C1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА С ТОРОИДНЫМ ЧЕРВЯКОМ И ШЕВРОННОЙ ШЕСТЕРНЕЙ | 2011 |
|
RU2482351C2 |
| МЕХАНИЗМ ПОДАЧИ ВЫСТРЕЛОВ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2153139C1 |
| ПРИВОД РУЧНОГО НАВЕДЕНИЯ ОРУДИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2342621C2 |
| УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ | 2003 |
|
RU2235958C1 |
| УСТРОЙСТВО ДЛЯ ДОСЫЛАНИЯ ВЫСТРЕЛА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 1999 |
|
RU2148230C1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2678397C1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2789364C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
Изобретение относится к военной технике и может найти применение как в общем машиностроении, так и в конструкциях следящих приводов, передающих большие нагрузки (механизмы поворота башни танков, боевых машин пехоты и др.). Механизм поворота содержит ведущее колесо 8, две косозубые шестерни 6, 7 с противоположным направлением зуба (или одна шевронная шестерня), жестко установленные на валу колеса 8, валы с промежуточными колесами 2, 3 и установленными на них косозубыми колесами 4, 5, сцепленными с косозубыми шестернями 6, 7. Вал ведущего колеса 8 выполнен плавающим и подпружиненным в осевом направлении. Технический результат - расширение области применения механизма, способного воспринимать и передавать большие нагрузки при уменьшении его габаритов. 2 с.п. ф-лы, 2 ил.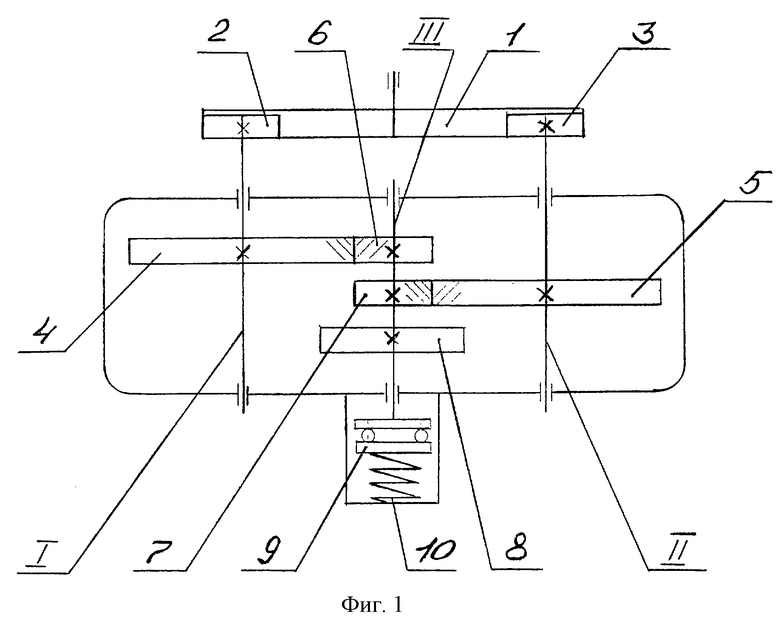
| Редуктор с цилиндрическими шестернями | 1957 |
|
SU117097A1 |
| Многопоточный двухступенчатый редуктор опорно-трансмиссионного узла ветроэнергетической установки | 1989 |
|
SU1796044A3 |
| РАЗДВОЕННЫЙ ЗУБЧАТЬШ ПРИВОД | 0 |
|
SU180448A1 |
| РЕДУКТОР ДЛЯ ТЯЖЕЛОНАГРУЖЕННЫХ ПРИВОДОВ | 0 |
|
SU181465A1 |
| 1970 |
|
SU410813A1 |
