Изобретение относится к военной технике и может быть использовано в конструкциях боевых машин пехоты, танках и др. бронетехнике.
Известен ручной привод механизма поворота башни боевой машины пехоты БМП-1 (Боевая машина пехоты БМП-1. Техническое описание. Военное издательство Министерства обороны СССР, М., 1972 г.), который состоит из маховика ручного привода, полого валика, связанного с конической шестерней, которая кинематически связана с червяком. С помощью зубчатой муфты маховик ручного привода связан с выходной шестерней. Аналогично устроен ручной привод подъемного механизма. В нем зубчатая муфта обеспечивает передачу вращения от маховика на червяк, червячное колесо и выходную шестерню. Ручное управление орудием осуществляется при обесточенных электромагнитных зубчатых муфтах оператором (наводчиком) боевой машины, который размещается в одноместном боевом отделении. Недостатком ручного привода боевой машины БМП-1 является невозможность дублирования ручного управления орудием командиром боевой машины. Этот недостаток снижает боевые характеристики машины.
Частично указанный недостаток устранен в двухместном боевом отделении танка Т-72 (Танк «Урал». Техническое описание и инструкция по эксплуатации. Книга первая. Военное издательство Министерства обороны СССР, М., 1975 г., стр.14, 200, 201, 205).
Привод ручного наведения орудия по вертикали входит в конструкцию подъемного механизма пушки и состоит из редуктора с рукояткой, установленных в корпусе подъемного механизма. Рукоятка ручного привода размещается перед наводчиком. Слева от наводчика закреплен ручной механизм поворота башни, который состоит из редуктора и рукоятки.
Недостатком привода ручного наведения является неудобство наведения орудия командиром танка при неработающем стабилизаторе со своего рабочего места. Этот недостаток снижает боевые характеристики машины.
Наиболее близким техническим решением по отношению к заявляемому объекту является конструкция привода ручного наведения орудия боевой машины БМП-2 (Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации. Часть 1. Москва. Военное издательство, 1987 г. стр.12, 55-58, 73-74). Привод ручного наведения выполнен в виде редукторов с рукоятками, входящих в состав подъемного механизма орудия и поворотного механизма башни. При ручном наведении орудия в вертикальной плоскости, вращение от рукоятки через червячный редуктор передается на вал-шестерню, которая, поворачивая сектор, перемещает орудие. При ручном наведении орудия в горизонтальной плоскости электропривод башни выключен. Вращение от рукоятки передается через конические шестерни на червяк, червячное колесо, через полумуфты на вал-шестерню и на выходную шестерню, которая обкатывается по зубчатому венцу нижнего погона, обеспечивая поворот башни.
Недостатком привода ручного наведения орудия БМП-2 является невозможность дублирования ручного наведения орудия командиром машины.
Задачей предлагаемого изобретения является повышение боевых характеристик боевой машины, а именно обеспечение дистанционного ручного наведения орудия.
Решение задачи достигается тем, что привод боевой машины, включающий подъемный механизм орудия и поворотный механизм башни и содержащий червячные редукторы и рукоятки ручного наведения, снабжен закрепленным на башне кронштейном, рукоятки установлены на кронштейне, оси червячных редукторов подъемного и поворотного механизмов и рукоятки снабжены шестернями, каждая из которых кинематически связана с двумя колесами, при этом одно из колес каждого механизма соответствующей рукояткой соединено с гибким валом, закручиваемым при рабочем вращении по часовой стрелке, а другие колеса соединены друг с другом гибким валом, закручиваемым при рабочем вращении против часовой стрелки, при этом гибкие валы установлены с предварительным закручиванием в направлении рабочего вращения.
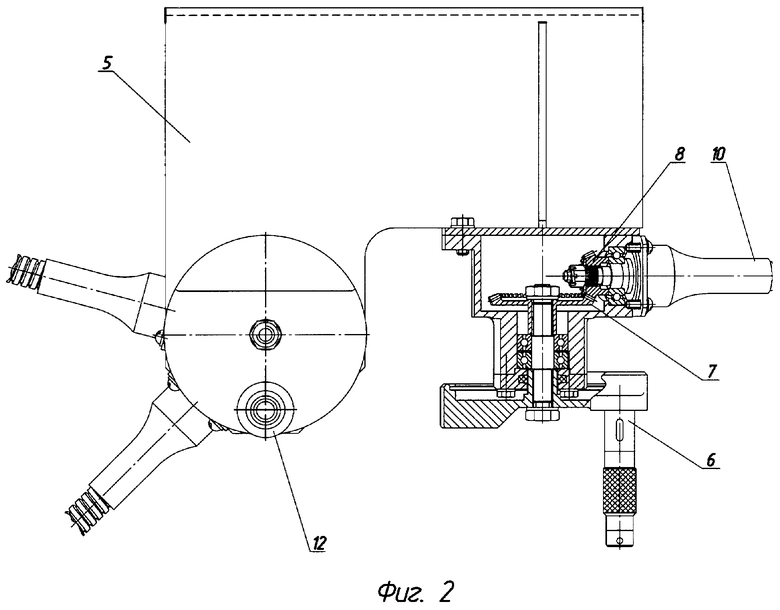
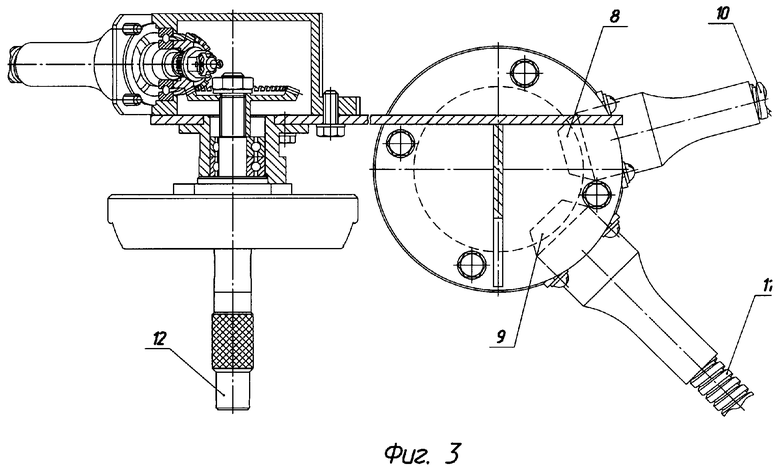
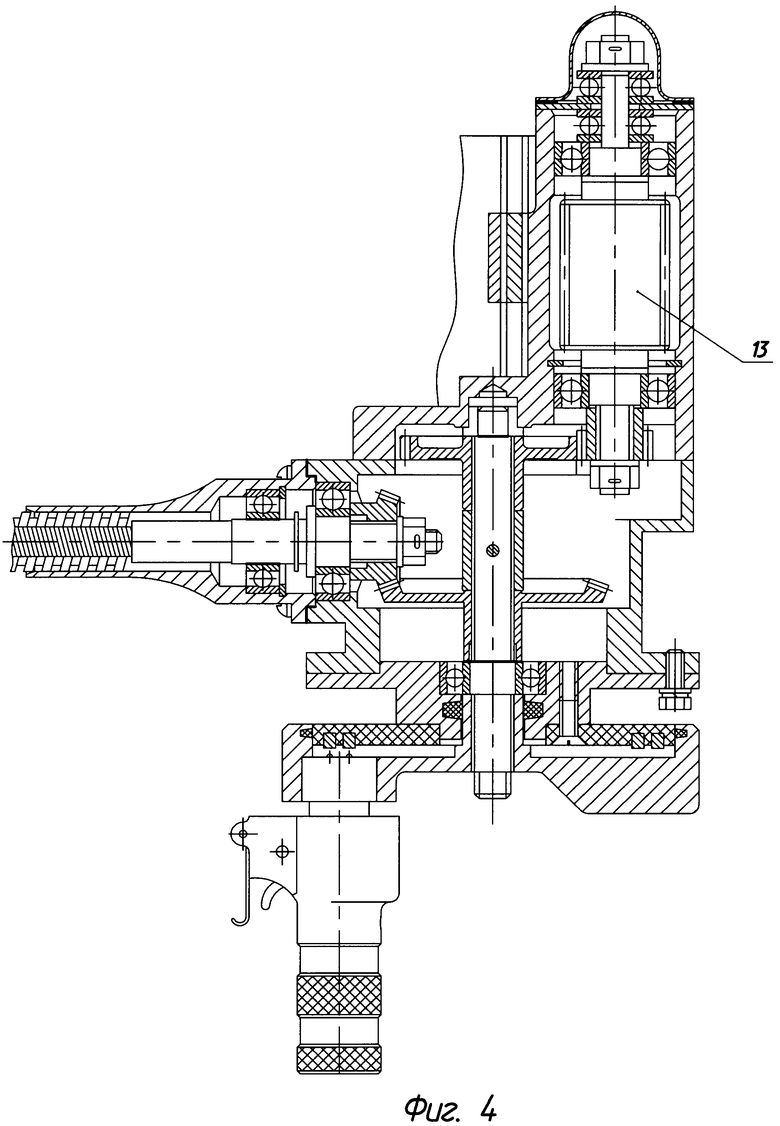
Предложенное техническое решение поясняется графическими материалами, где на фиг.1 изображена конструкция ручной ветви механизма поворота башни, на фиг.2 - кронштейн с рукоятками, вид сбоку, на фиг.3 - кронштейн с рукоятками, вид сверху, на фиг.4 - ручная ветвь механизма вертикального наведения орудия. Привод ручного наведения орудия содержит червячный редуктор механизма поворота башни и червячный редуктор механизма наведения орудия. На оси червяка 1 закреплена коническая шестерня 2, которая через шестерни 14 и 15 кинематически связана с двумя колесами 3 и 4. На кронштейне 5 установлена рукоятка 6 с конической шестерней 7, которая также кинематически связана с двумя колесами 8 и 9. Колесо 8 гибким валом 10 левого исполнения соединено с колесом 3, а колесо 9 гибким валом 11 правого исполнения соединено с колесом 4. Рукоятка 12 аналогично связана с червяком 13 механизма вертикального наведения орудия.
В процессе сборки гибкий вал 10 закручивается определенным моментом против часовой стрелки и колесо 8 вводится в зацепление с шестерней 7 при застопоренной шестерне 2. Гибкий вал 11 закручивается по часовой стрелке и колесо 9 аналогично вводится в зацепление с шестерней 7. Предварительное закручивание гибких валов необходимо для уменьшения люфта на рукоятках, связанного со скручиванием жил гибкого вала в процессе работы механизма.
Привод ручного наведения орудия работает следующим образом. При вращении рукоятки 6 по часовой стрелке гибкий вал 10 работает на закручивание и передает вращение на червяк 1, который кинематически связан с погоном башни. Башня поворачивается влево. При вращении рукоятки 6 против часовой стрелки на закручивание работает гибкий вал 11, при этом башня поворачивается вправо. Аналогично работает ручной привод наведения орудия по вертикали.
Таким образом, предложенное техническое решение позволило повысить боевые характеристики боевой машины за счет обеспечения дистанционного ручного наведения орудия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| Система управления спусковыми механизмами пушек комплекса вооружения | 2020 |
|
RU2752111C1 |
| МЕХАНИЗМ ПОВОРОТА (ВАРИАНТЫ) | 2002 |
|
RU2225549C2 |
| УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ | 2003 |
|
RU2235958C1 |
| МЕХАНИЗМ ПОВОРОТА ЛЮКА КОМАНДИРА | 1996 |
|
RU2134397C1 |
| КОНВЕЙЕР ДЛЯ РАЗМЕЩЕНИЯ И ПОДАЧИ ВЫСТРЕЛОВ | 1999 |
|
RU2165573C2 |
| ГРАНАТОМЕТНАЯ УСТАНОВКА | 2002 |
|
RU2222759C2 |
| МЕХАНИЗМ ПОДЪЕМА | 2018 |
|
RU2692323C1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2014 |
|
RU2547669C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА "ФАГОТ" | 2024 |
|
RU2834077C1 |
Изобретение относится к военной технике и может быть использовано в конструкциях боевых машин пехоты, танках и другой бронетехнике. Привод боевой машины включает подъемный механизм орудия и поворотный механизм башни, содержащие червячные редукторы и рукоятки ручного наведения. Привод снабжен закрепленным на башне кронштейном. Рукоятки установлены на кронштейне. Оси червячных редукторов подъемного и поворотного механизмов и рукоятки снабжены шестернями, каждая из которых кинематически связана с двумя колесами. Одно из колес каждого механизма соответствующей рукояткой соединено с гибким валом, закручиваемым при рабочем вращении по часовой стрелке. Другие колеса соединены друг с другом гибким валом, закручиваемым при рабочем вращении против часовой стрелки. Гибкие валы установлены с предварительным закручиванием в направлении рабочего вращения. Техническим результатом является повышение боевых характеристик боевой машины, а именно обеспечение дистанционного ручного наведение орудия. 4 ил.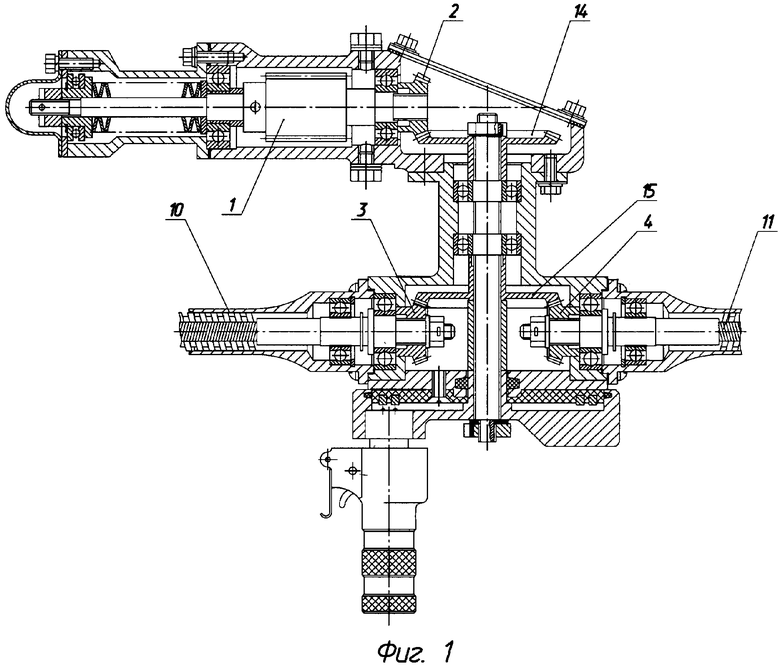
Привод боевой машины, включающий подъемный механизм орудия и поворотный механизм башни, содержащие червячные редукторы и рукоятки ручного наведения, отличающийся тем, что он снабжен закрепленным на башне кронштейном, а рукоятки установлены на кронштейне, оси червячных редукторов подъемного и поворотного механизмов и рукоятки снабжены шестернями, каждая из которых кинематически связана с двумя колесами, при этом одно из колес каждого механизма соответствующей рукояткой соединено с гибким валом, закручиваемым при рабочем вращении по часовой стрелке, а другие колеса соединены друг с другом гибким валом, закручиваемым при рабочем вращении против часовой стрелки, при этом гибкие валы установлены с предварительным закручиванием в направлении рабочего вращения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание и инструкция по эксплуатации, часть 1 | |||
| - М.: Военное издательство, 1987, с.12, 55-58, 73-74 | |||
| RU 93044532 A, 20.02.1996 | |||
| RU 93038504 A, 20.01.1995 | |||
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ПЕРИНАТАЛЬНЫХ ГИПОКСИЧЕСКИХ И ТРАВМАТИЧЕСКИХ ПОРАЖЕНИЙ НЕРВНОЙ СИСТЕМЫ У НОВОРОЖДЕННЫХ | 2003 |
|
RU2249823C1 |

