Предлагаемое изобретение относится к космической области и может быть использовано при коррекции движения космического аппарата, например, при сближении, причаливании.
Космические аппараты (КА), предназначенные для выполнения причаливания, оснащены двигателями управления ориентацией и коррекции движения центра масс. Поскольку, практически, вектор тяги двигателей коррекции движения центра масс невозможно направить через центр масс космического аппарата, то при их включении всегда возникает возмущающее ускорение, которое должна компенсировать его система ориентации своими двигателями. Аналогичная ситуация имеет место при отработке корректирующего импульса для коррекции траектории полета КА по заранее рассчитанной уставке.
Известные системы управления ориентацией не используют информацию о включении двигателей перемещения центра масс для улучшения качества переходных процессов - уменьшения амплитуды колебаний угловой скорости, изменения угла. Фиксированная настройка коэффициентов системы управления ориентацией под расчетное значение возмущающего ускорения так же, как и увеличение запаздывания, приводят к ухудшению качества переходного в системе ориентации.
Известно устройство формирования управляющих воздействий, используемое при ручном управлении космическими аппаратами. Устройство описано в книге Лебедев А.А., Соколов В.Б. "Встреча на орбите", М.: Машиностроение, 1969 г.
Устройство состоит из блока выдачи угловой скорости порогового устройства, блока формирования импульсов и исполнительных органов (ИО).
При превышении сигналом угловой скорости заданного в пороговом устройстве значения блок задания управляющих импульсов в зависимости от величины сигнала угловой скорости выдает команды на включение ИО. Выключение ИО производится, когда угловая скорость станет меньше заданного порога срабатывания.
Данное устройство ограничивает только величину угловой скорости. При наличии возмущающего момента угловая скорость должна превысить заданный порог срабатывания, чтобы включениями управляющих двигателей ориентации компенсировать влияние возмущающего момента.
Известно устройство управления движением вокруг центра масс, описанное в многочисленных публикациях, например, Лебедев А.А., Соколов В.Б. "Встреча на орбите", М.: Машиностроение, 1969 г., стр.285-286, когда для определения моментов приложения управляющих воздействий и его длительности формируется управляющая функция
ξ=ϕ+к·ω
где - ϕ - угол рассогласования,
- ω - угловая скорость,
- К - коэффициент демпфирования.
Управляющая функция выдается на вход релейного усилителя с зоной нечувствительности d1. При |ξ|=d1 начинается приложение управляющих воздействий, включение двигателей управления движением вокруг центра масс, для выбора рассогласования по углу и угловой скорости. Обычно, пока |ξ|≤3d1 производится импульсное приложение управляющих воздействий.
При наличии возмущающего ускорения в установившемся режиме такой способ управления обеспечивает значение угловой скорости ниже порога срабатывания. Однако переходной процесс, при котором величина угловой скорости значительно больше значения в установившемся режиме, может быть длителен по времени. Эта длительность зависит от значения угла рассогласования, при котором появилось возмущающее ускорение, и при обычно используемом значении К=5-10 секунд длительность до 10-15 секунд и более. К тому же характеристики критичны к величине запаздывания в системе ориентации. Характеристики системы ухудшаются, при увеличении запаздывания и возмущающего ускорения.
Устройство состоит из блока выдачи угла, блока выдачи угловой скорости, первого сумматора, релейного усилителя с зоной нечувствительности, который формирует и управляющие импульсы для включения исполнительных органов, и исполнительных органов.
Выход блока выдачи угла через первый сумматор, ко второму входу которого подключен выход блока выдачи угловой скорости, и релейный усилитель с зоной нечувствительности подключен к исполнительным органам.
Рассматриваемое устройство обеспечивает более высокое качество переходных процессов, чем аналог. Однако при увеличении запаздывания в сигналах угла и угловой скорости и наличии внешнего возмущающего момента характеристики ухудшаются. При дискретной реализации устройства характеристики такого устройства будут зависеть от длительности такта работы вычислителя и от места подключения алгоритма управления на такте. При смещении момента подключения от начала такта к середине или концу характеристики так же будут ухудшаться.
Техническим результатом изобретения является повышение точности стабилизации при управлении движением космического аппарата с одновременным улучшением качества переходных процессов при наличии внешнего возмущающего момента.
Технический результат достигается тем, что в систему управления движением космического аппарата, в систему управления движением космического аппарата, состоящую из блока выдачи угла, блока выдачи угловой скорости, первого сумматора, релейного усилителя с зоной нечувствительности и исполнительных органов управления движением вокруг центра масс, причем выход блока выдачи угла через первый сумматор, ко второму входу которого подключен выход блока выдачи угловой скорости, подключен к релейному усилителю с зоной нечувствительности, выход которого соединен со вторым сумматором, дополнительно введены блок включения двигателей перемещения центра масс, блок тестового включения, блок вычисления приращения скорости, блок вычисления длительности опережающих включений, второй сумматор, два блока коммутации и исполнительные органы управления движением центра масс, при этом выход блока тестового включения соединен с исполнительными органами управления движением центра масс и первым блоком коммутации, выход блока включения двигателей перемещения центра масс соединен с исполнительными органами управления движением центра масс и вторым блоком коммутации, к второму входу которого подключен выход блока выдачи угловой скорости через блок вычисления приращения скорости, ко второму входу которого подключен выход блока тестового включения, и блок вычисления длительности опережающих включений, выход второго блока коммутации через второй сумматор и первый блок коммутации соединен с исполнительными органами управления движением вокруг центра масс.
Технический результат в предлагаемом устройстве достигается за счет следующего:
- введенное опережающее включение ИО управления движением вокруг центра масс при появлении внешнего возмущающего ускорения уменьшает его влияние на переходные процессы при наличии запаздывания в системе управления,
- опережающие включения ИО управления движением вокруг центра масс допускают увеличение величины возмущающего ускорения до значений, близких к величине управляющего ускорения без практического ухудшения качества переходных процессов,
- введенное тестовое включение ИО управления движением центра масс, вызывающих появление возмущающих ускорений, позволяет определить (или уточнить) фактическую величину этих ускорений, вычислить длительность опережающих включений ИО управления движением вокруг центра масс для парирования этого возмущающего ускорения и в дальнейшем при регулировании параметров углового движения увеличивать длительность каждого их включения на вычисленное значение, а при отсутствии необходимости регулирования параметров углового движения включать ИО управления движением вокруг центра масс только на вычисленное по величине возмущающего ускорения значение.
Блок-схема системы управления движением приведена на чертеже.
Устройство состоит из блока выдачи угла 1, блока выдачи угловой скорости 2, первого и второго сумматоров 3, 5 соответственно, релейного усилителя 4, исполнительных органов управления движением вокруг центра масс 6, блока включения двигателей перемещения центра масс 7, блока тестового включения 8, блока вычисления приращения скорости 9, блока вычисления длительности опережающих включений 10 и 2-х блоков коммутации 11, 12, исполнительных органов управления движением центра масс 13.
При этом выход блока выдачи угла 1 подключен к первому входу первого сумматора 3, ко второму входу которого подключен выход блока выдачи угловой скорости 2, а выход первого сумматора подключен к релейному усилителю с зоной нечувствительности 4. Выход блока тестового включения 8 соединен с исполнительными органами управления движением центра масс 13 и первым входом первого блока коммутации 11, выход блока включения двигателей перемещения центра масс 7 соединен с исполнительными органами управления движением центра масс 13 и первым входом второго блока коммутации 12, выход блока выдачи угловой скорости 2 соединен с первым входом блока вычисления приращения скорости 9, выход которого через блок вычисления длительности опережающих включений 10 соединен со вторым входом второго блока коммутации 12, ко второму входу блока вычисления приращения скорости 9 подключен выход блока тестового включения 8, выход второго блока коммутации 12 соединен со вторым входом второго сумматора 5, выход которого соединен со вторым входом первого блока коммутации 11, а выход первого блока коммутации 11 соединен с исполнительными органами управления движением вокруг центра масс 6, при этом выход релейного усилителя с зоной нечувствительности 4 соединен со вторым входом второго сумматором 5.
В момент включения системы блок управления 8 выдает команду на включение ИО управления движением центра масс 13 на заранее заданную длительность. Внутри этой заданной длительности выбирается интервал времени, на котором блок 9 фиксирует приращение угловой скорости. Длительность тестового включения и интервал времени для определения приращения угловой скорости выбирается из условия минимального влияния запаздывания на вычисление фактического ускорения. Величина приращения скорости выдается в блок вычисления длительности опережающих включений 10. В блоке 10 по величине приращения скорости и длительности тестового включения вычисляются возмущающее ускорение. По соотношению вычисленного возмущающего и расчетного управляющего ускорений, определяется необходимая длительность опережающих включений ИО управления движением вокруг центра масс 6 с тем, чтобы устранить влияние возмущающего ускорения на процесс регулирования параметров движения. После этого, при включении двигателей для коррекции движения центра масс корабля (из блока 7), что и вызывает появление возмущающего ускорения, будут включаться и управляющие угловым движением двигатели, чтобы скомпенсировать воздействие на корабль возмущающего ускорения.
Для регулирования угловых координат на вход первого сумматора 3 подаются угол из блока 1 и угловая скорость из блока 2. Первый сумматор формирует управляющую функцию
ξ=ϕ+к·ω
где - ϕ - угол рассогласования,
- ω - угловая скорость,
- К - коэффициент демпфирования.
Управляющая функция выдается на вход релейного усилителя с зоной нечувствительности d1. При |ξ|d1 начинается включение ИО управления движением вокруг центра масс для устранения появившегося рассогласования. Обычно, пока |ξ|≤d2 производится импульсное приложение управляющих воздействий, длительность которых регулируется в зависимости от величины ξ. При |ξ| d2 ИО управления движением вокруг центра масс включаются в непрерывный режим.
При включении системы управления движением блок тестового включения (блок 8) включит ИО управления движением центра масс 13 на заранее заданную длительность, а также выдаст команду в блок вычисления приращения скорости 9. По этой команде блок 9 в заранее определенные моменты времени на фоне работающих ИО сделает два отсчета угловой скорости и вычислит ее приращение. Величина приращения скорости поступит в блок вычисления длительности опережающих включений 10, где будет определена величина возмущающего ускорения по приращению угловой скорости на определенном временном интервале, а также вычислена длительность опережающих включений ИО управления движением вокруг центра масс 6 по соотношению между величинами возмущающего ускорения и управляющего. Вычисленная длительность поступит на вход 2-го блока коммутации 12, который будет подавать это значение только тогда, когда получит команду из блока 7 о включении ИО перемещения центра масс.
На время тестового включения 1-й блок коммутации 11 запретит подачу команд на включения ИО из 2-го сумматора 5 для коррекции углового положения КА.
Предлагаемое устройство может быть реализовано известными техническими решениями.
Блок выдачи угла 1 может быть исполнен в виде инфракрасной вертикали (ИКВ), используемой на транспортных кораблях «Прогресс М» и «Союз ТМ».
Блок выдачи угловой скорости 2 может быть выполнен в виде гироскопического прибора - датчика угловых скоростей, используемых на транспортных кораблях «Прогресс М» и «Союз ТМ».
Сумматоры 3 и 5 могут быть реализованы на основе стандартных усилителей постоянного тока.
Релейный усилитель с зоной нечувствительности 4 может быть выполнен на основе схемы, использующей 2 усилителя постоянного тока с разомкнутой обратной связью и разнополярными опорными напряжениями, выходы которых суммируются на третьем усилителе постоянного тока. Все три усилителя охвачены отрицательной обратной связью, выполненной на основе усилителя постоянного тока с включением емкости в его цепь обратной связи в «Практике аналогового моделирования динамических систем» авторов И.М.Тетельбаум, Ю.Р.Шнейдер, Москва, Энергоатомиздат, 1987 г.
Исполнительные органы 6 могут быть выполнены на основе реактивных двигателей, используемых на транспортных кораблях «Прогресс М» и «Союз ТМ»
Блок включения двигателей перемещения центра масс 7 и блок тестового включения 8 могут быть реализованы на основе схемы генератора единичных сигналов, указанной в «Практике аналогового моделирования динамических систем» авторов И.М.Тетельбаум, Ю.Р.Шнейдер, Москва, Энергоатомиздат, 1987 г.
Блок вычисления приращения скорости 9 может быть выполнен на основе схемы генератора единичных сигналов (см. 3.2.5) и схемы запоминания мгновенного значения переменной (см. 4.5.4), указанных в «Практике аналогового моделирования динамических систем» авторов И.М.Тетельбаум, Ю.Р.Шнейдер, Москва, Энергоатомиздат, 1987 г.
Блок вычисления длительности опережающих включений 10 может быть реализован на основе схемы генератора прямоугольных колебаний (см. 3.3.31), указанной в «Практике аналогового моделирования динамических систем» авторов И.М.Тетельбаум, Ю.Р.Шнейдер, Москва, Энергоатомиздат, 1987 г.
Блок коммутации 11, 12 может быть выполнен на основе усилителей постоянного тока и реле постоянного тока с нормально замкнутыми и разомкнутыми контактами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1998 |
|
RU2158951C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2002 |
|
RU2225811C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104233C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104234C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |
Изобретение относится к космонавтике и может быть использовано, в частности, при сближении и причаливании в процессе стыковки. Предлагаемая система содержит блоки выдачи угла и угловой скорости, первый и второй сумматоры, релейный усилитель с зоной нечувствительности и исполнительные органы (ИО) управления движением центра масс и вокруг центра масс космического аппарата (КА). Выход блока выдачи угла подключен к первому входу первого сумматора, ко второму входу которого подключен выход блока выдачи угловой скорости, а выход первого сумматора подключен к релейному усилителю. В систему введены блоки включения двигателей перемещения центра масс, тестового включения ИО управления движением центра масс, блоки вычисления приращения угловой скорости и длительности опережающих включений ИО управления движением вокруг центра масс, а также первый и второй блоки коммутации. Выход блока тестового включения соединен с ИО управления движением центра масс и первым входом первого блока коммутации. Выход блока включения двигателей перемещения центра масс соединен с ИО управления движением центра масс и первым входом второго блока коммутации. Выход блока выдачи угловой скорости соединен с первым входом блока вычисления приращения угловой скорости, выход которого через блок вычисления длительности опережающих включений соединен со вторым входом второго блока коммутации. Ко второму входу блока вычисления приращения угловой скорости подключен выход блока тестового включения. Выход второго блока коммутации соединен со вторым входом второго сумматора, выход которого соединен со вторым входом первого блока коммутации. Выход первого блока коммутации соединен с ИО управления движением вокруг центра масс, а выход релейного усилителя - со вторым входом второго сумматора. Техническим результатом изобретения является повышение точности стабилизации КА при управлении движением КА с одновременным улучшением качества переходных процессов при наличии внешнего возмущающего момента. 1 ил.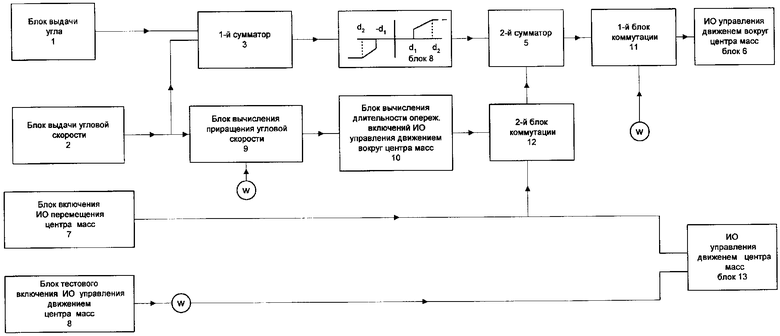
Система управления движением космического аппарата, содержащая блок выдачи угла, блок выдачи угловой скорости, первый сумматор, релейный усилитель с зоной нечувствительности и исполнительные органы управления движением вокруг центра масс, причем выход блока выдачи угла подключен к первому входу первого сумматора, ко второму входу которого подключен выход блока выдачи угловой скорости, а выход первого сумматора подключен к релейному усилителю с зоной нечувствительности, отличающаяся тем, что в нее введены блок включения двигателей перемещения центра масс, блок тестового включения исполнительных органов управления движением центра масс, блок вычисления приращения угловой скорости, блок вычисления длительности опережающих включений исполнительных органов управления движением вокруг центра масс, второй сумматор, первый и второй блоки коммутации и исполнительные органы управления движением центра масс, при этом выход указанного блока тестового включения соединен с исполнительными органами управления движением центра масс и первым входом первого блока коммутации, выход блока включения двигателей перемещения центра масс соединен с исполнительными органами управления движением центра масс и первым входом второго блока коммутации, выход блока выдачи угловой скорости соединен с первым входом блока вычисления приращения угловой скорости, выход которого через указанный блок вычисления длительности опережающих включений соединен со вторым входом второго блока коммутации, ко второму входу блока вычисления приращения угловой скорости подключен выход указанного блока тестового включения, выход второго блока коммутации соединен со вторым входом второго сумматора, выход которого соединен со вторым входом первого блока коммутации, а выход первого блока коммутации соединен с исполнительными органами управления движением вокруг центра масс, при этом выход релейного усилителя с зоной нечувствительности соединен со вторым входом второго сумматора.
| ЛЕБЕДЕВ А.А., СОКОЛОВ В.Б | |||
| Встреча на орбите | |||
| Машиностроение | |||
| М | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| ПЕРЕДВИЖНАЯ ДИАГРАММА ДЛЯ СРАВНЕНИЯ ЦЕННОСТИ РАЗЛИЧНЫХ ПРОДУКТОВ ПО ИХ КАЛОРИЙНОСТИ | 1919 |
|
SU285A1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178761C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178760C1 |
| ИНСТРУМЕНТ ДЛЯ ПРЕССОВАНИЯ ТРУБ | 2002 |
|
RU2236316C2 |

