Известен способ управления трансмиссией дорожно-транспортной машины и устройство для его осуществления по заявке от №97116066/28 от 29.09.97 г. Эта трансмиссия содержит автоматически включаемую и блокируемую фрикционными муфтами планетарную передачу, соединенную с коробкой передач, все ступени которой также переключаются фрикционными муфтами по сигналам переключателя ступеней с помощью электромагнитных клапанов.
Автоматическое управление планетарной передачей выполняется с помощью управляющего звена с релейной характеристикой, устойчивые состояния которого определяются частотой вращения вала планетарной передачи. При этом в зависимости от направления проводимого переключения ступеней коробки передач формируется сигнал определенной длительности для принудительного переключения указанного управляющего звена.
В известной трансмиссии обеспечивается удвоение числа ступеней по сравнению с переключаемой водителем коробкой передач, что улучшает эксплуатационные качества дорожно-транспортной машины.
Все ступени этой трансмиссии переключаются без разрыва потока мощности. Из-за большой сложности, металлоемкости и трудоемкости изготовления областью применения такой трансмиссии являются строительно-дорожные машины, например грейдеры и бульдозеры.
Известен также способ управления трансмиссией транспортной машины и устройство для его осуществления по патенту №2077997 РФ, В 60 К 41/22 от 28.08.94 г. Эта трансмиссия содержит автоматически включаемую и блокируемую по сигналам управляющего звена планетарную передачу, сцепление и коробку передач, ступени которой переключаются зубчатыми муфтами с помощью рычага переключения.
Управляющее звено указанной трансмиссии имеет релейную характеристику и устойчивые состояния его определяются сигналом частоты вращения вала планетарной передачи. При этом снимают сигнал полного выключения и включения сцепления и сигнал датчика направления переключения в коробке передач и формируют из них другой сигнал, взаимодействующий с указанным сигналом частоты. При этом при переключении с низшей ступени на высшую ступень суммарное действие сигналов на управляющее звено уменьшают, а при переключении с высшей ступени на низшую ступень - увеличивают.
Трансмиссия по патенту №2077997 обеспечивает удвоение числа ступеней по сравнению с переключаемым водителем числом ступеней коробки передач, что существенно улучшает экплуатационные характеристики транспортной машины.
К недостаткам этой трансмиссии следует отнести сложность датчика полного выключения и полного включения сцепления и сложность электронного датчика направления переключения ступеней, требующего применения управляемых от коробки передач концевых выключателей по числу ступеней переднего хода. Это снижает надежность устройства управления трансмиссией. Кроме того, при таком датчике направления переключения ступени указанный формируемый сигнал начинает действовать только после выключения сцепления и включения новой ступени в коробке передач, что не гарантирует выполнения переключения в планетарной передаче при полном выключении сцепления. Следствием этого возможно появление толчков в трансмиссии.
Предусмотренный более простой вариант датчика направления включения понижающих ступеней коробки передач связан с наличием специальной кнопки на рычаге переключения, дополнительно управляемой водителем, что вносит определенные неудобства при управлении трансмиссией.
К недостаткам известной трансмиссии также следует отнести конструктивное выполнение планетарной передачи, содержащей две муфты свободного хода. Из-за этого входной вал трансмиссии может вращаться только в одну сторону, что нежелательно. Также возникают трудности получения высокой долговечности муфты свободного хода, соединенной с солнечным колесом, т.к. на режиме блокировки планетарной передачи на обоймах этой муфты отмечается большая разность угловых скоростей.
Известна также трансмиссия транспортного средства по а.с. №1414670, В 60 К 41/22. В этой трансмиссии включение и блокировка планетарной передачи осуществляется фрикционными муфтой и тормозом нормально разомкнутого типа с помощью гидроцилиндров, избирательно включаемых золотниковыми клапанами. Устройство управления этой планетарной передачей не обеспечивает без дополнительной муфты свободного хода необходимые в эксплуатации режим запуска двигателя буксированием транспортного средства и режим торможения двигателем на стоянках. Кроме того, в трансмиссии по а.с. №1414670 не обеспечивается удвоение числа ступеней по сравнению с переключаемым водителем числом ступеней коробки передач.
Настоящее изобретение относится к новым способу управления, кинематической схеме и устройству управления трансмиссией транспортной машины, содержащей включаемую и блокируемую фрикционными муфтой и тормозом от сигналов управляющего звена планетарную передачу, сцепление и ступенчатую коробку передач. Управляющее звено этой трансмиссии имеет устойчивые состояния включения или блокировки планетарной передачи в зависимости от частоты вращения вала планетарной передачи.
Целью изобретения является устранение недостатков известного способа управления трансмиссией и реализующих этот способ устройств управления по патенту №2077997.
Новый способ управления трансмиссии отличается тем, что в зависимости от состояния планетарной передачи при выключенном сцеплении формируют первый сигнал, подаваемый на управляющее звено и переводящий его в другое устойчивое состояние, а также формируют второй сигнал, предотвращающий обратный переход управляющего звена в исходное устойчивое состояние на время действия первого формируемого сигнала, при этом первый формируемый сигнал продолжает действовать заданное время и после включения сцепления.
При включении в коробке передач ступени, предназначенной для трогания с места транспортной машины, формируют третий сигнал, предотвращающий перевод управляющего звена в состояние блокировки планетарной передачи при выключенном сцеплении.
Предусмотрен вариант способа управления, отличающийся тем, что при трогании транспортной машины с места до достижения ею заданной скорости формируют третий сигнал, предотвращающий перевод управляющего звена в состояние блокировки планетарной передачи при выключении сцепления.
При этом также предусмотрена подача на управляющее звено дополнительного сигнала, соответствующего нагрузке двигателя транспортной машины.
Кроме того, предусмотрено, что солнечное колесо планетарной передачи соединено с расположенным между планетарной передачей и сцеплением фрикционным тормозом нормально замкнутого типа, имеющим цилиндр для его выключения, соединенный гидравлически с цилиндром фрикционной муфты блокировки планетарной передачи.
Предложенный новый способ управления трансмиссией транспортной машины осуществляется с помощью двух вариантов устройства управления трансмиссией транспортной машины. Эти устройства управления содержат электрическое или гидравлическое управляющее звено и работающий по сигналам управляющего звена электрический переключатель для избирательного соединения с источником электропитания управляющих электродов двух тиристоров, катоды которых через диод соединены с датчиком выключения сцепления, соединенным также с входной цепью таймера, выходная цепь которого соединена с катодами упомянутых тиристоров, при этом анод каждого тиристора соединен через дополнительный диод с управляющим электродом другого тиристора и с устройством подачи сигнала на управляющее звено.
При электронном управляющем звене устройствами подачи сигнала на управляющее звено являются электрические цепи, а при гидравлическом - исполнительные электромагнитные клапаны.
Кроме того, с целью предотвращения блокировки планетарной передачи при выключении сцепления перед троганием транспортной машины с места предусмотрено устройство отключения электропитания от упомянутого электрического переключателя.
В устройстве управления трансмиссией также предусмотрен световой индикатор включения блокировки планетарной передачи.
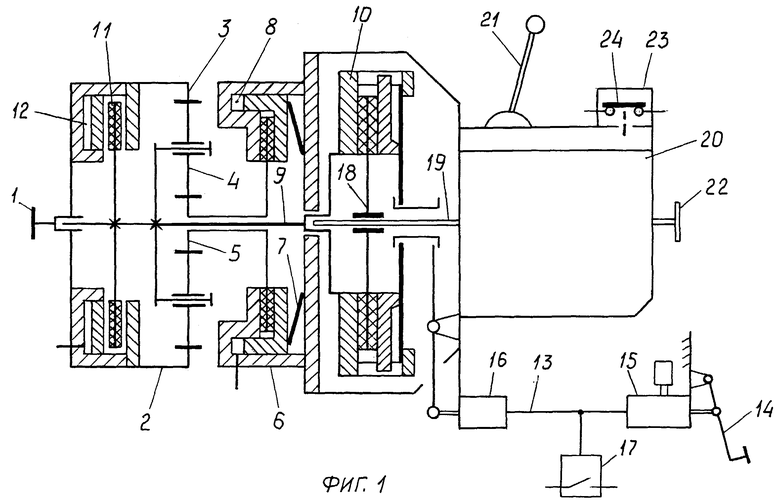
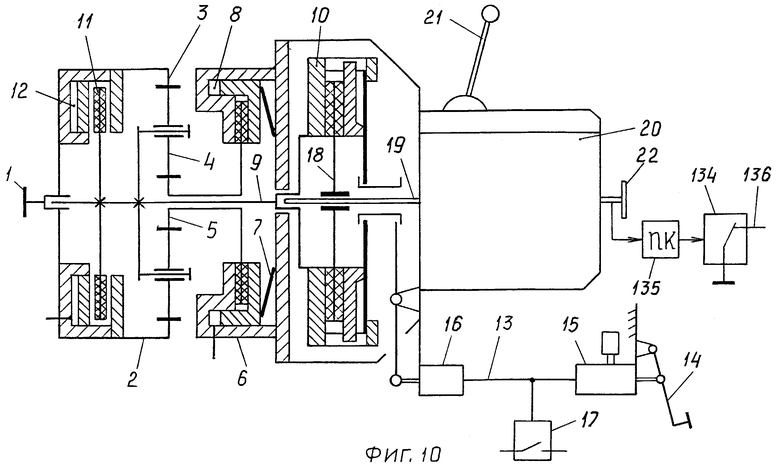
На фиг.1 изображена кинематическая схема трансмиссии; на фиг.2 - принципиальная схема управления трансмиссией; на фиг.3 - устройство регулятора давления; на фиг.4 - график статической характеристики регулятора давления; на фиг.5 - электрическая схема таймера; на фиг.6 - график тяговых характеристик трансмиссии транспортной машины; на фиг.7 - часть схемы по фиг.2 с коррекцией управляющего звена по нагрузке двигателя; на фиг.8 - принципиальная схема управления трансмиссией с электронным управляющим звеном; на фиг.9 - структурная схема электронного управляющего звена; на фиг.10 - кинематическая схема трансмиссии с датчиком скорости транспортной машины; на фиг.11 - структурная схема датчика скорости; на фиг.12 - принципиальная схема управления трансмиссией по фиг.10.
Трансмиссия /фиг.1/ содержит приводимый от двигателя /не показан/ транспортной машины входной вал 1, кинематически соединенный с планетарной передачей 2, содержащей центральное колесо 3, сателлиты 4 и солнечное колесо 5. Солнечное колесо 5 соединено с фрикционным тормозом 6, например, нормально замкнутого типа, содержащего диафрагменную пружину 7. Фрикционный тормоз 6 снабжен цилиндром 8 для гидравлического управления.
Выходной вал 9 планетарной передачи 2 соединен со сцеплением 10, при этом фрикционный тормоз 6 расположен между планетарной передачей 2 и сцеплением 10. Выходной вал 9 планетарной передачи также соединен с фрикционной муфтой блокировки 2, имеющей цилиндр 12 для гидравлического управления. Для выключения сцепления 10 предусмотрен, например, гидропривод 13, содержащий педаль 14, главный цилиндр 15 и исполнительный цилиндр 16.
Гидропривод 13 сцепления 10 также соединен с датчиком 17 выключения сцепления, имеющим электрический выход, срабатывающим от повышения давления в гидроприводе 13 при выключенном сцеплении 10.
Ведомый диск 18 сцепления 10 соединен с первичным валом 19 коробки передач 20, ступени в которой включаются, например, механически рычагом переключения 21.
Связь коробки передач 20 с колесами транспортной машины /не показана/ осуществляется от выходного вала 22 коробки передач 20.
На коробке передач 20 установлен датчик 23, например, содержащий электрический выключатель с нормально замкнутыми контактами 24. Управление датчиком 23 осуществляется от рычага переключения передач 21 коробки передач 20.
Контакты 24 датчика 23 остаются замкнутыми при включении ступеней коробки передач, на которых производится трогание с места транспортной машины. Например, это первая ступень UK1 и ступень заднего хода UR.
При включении других ступеней коробки передач контакты 24 датчика 23 размыкаются.
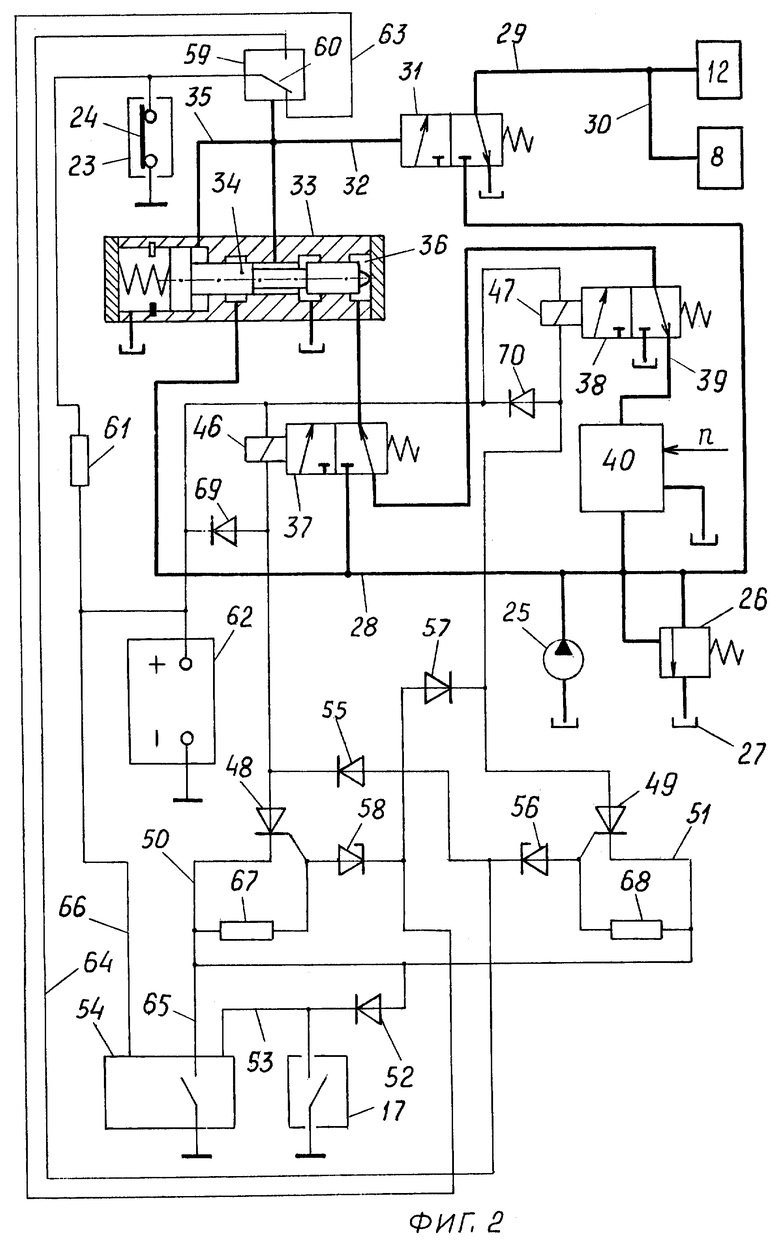
Трансмиссия /фиг.2/ содержит приводимый от двигателя транспортной машины /не показан/ насос 25 как источник давления рабочей жидкости /масла/, параллельно которому установлен ограничитель давления 26. Масло для работы трансмиссии находится в гидробаке 27, куда происходит и слив масла из всех гидравлических узлов трансмиссии, например из ограничителя давления 26. Выход насоса 25 соединен с нагнетательной линией 28, где поддерживается давление Рн масла.
Цилиндры 8 и 12 через каналы 29 и 30 соединены между собой и с переключающим клапаном 31, имеющим гидравлическое управление через канал 32 от управляющего звена 33.
Управляющее звено 33 выполнено в виде клапана с подпружиненным золотником 34, охваченным гидравлической положительной обратной связью через канал 35.
Управляющее звено 33 также соединено с нагнетательной линией 28 и гидробаком 27.
Полость 36 управляющего звена 33 через последовательно установленные исполнительные электромагнитные клапаны 37, 38 и трубопровод 39 гидравлически соединена с регулятором давления 40.
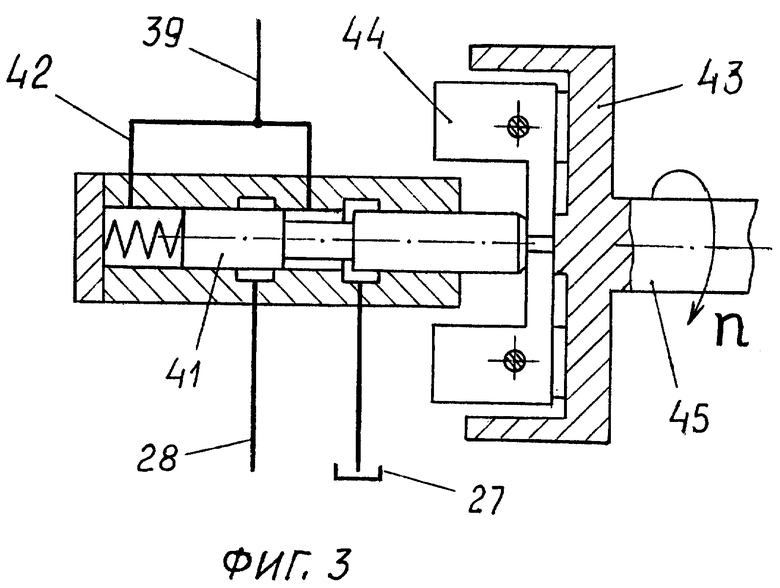
Регулятор давления 40 /фиг.3/ содержит, например, подпружиненный золотник 41, охваченный отрицательной гидравлической обратной связью через канал 42. Силовое воздействие на золотник 41 выполняется центробежным регулятором 43 с грузами 44. Вал 45 центробежного регулятора 43 приводится во вращение от одного из валов /1 или 9/ планетарной передачи 2 /фиг.1/, где n - частота вращения этого вала.
На фиг.4 приведена статическая характеристика регулятора давления 40. Здесь Р - давление масла в трубопроводе 39, регулируемое при изменении частоты вращения вала n. При больших частотах вращения n давление Р=Рн. В частном случае можно принять, что n равно частоте вращения вала 1.
Таким образом, регулятор давления 40 производит изменение давления Р в полости 36 управляющего звена 33 в зависимости от частоты вращения n.
При малых частотах вращения n<n2 управляющее звено 33 всегда находится в состоянии включения планетарной передачи /фиг.2/, т.к. при этом канал 32 соединен с гидробаком, а фрикционный тормоз 6 замкнут.
При увеличении частоты вращения до n=n1 и возрастании давления масла в полости 36 до Р=P1 происходит перемещение золотника 34 управляющего звена 33 в крайнее левое положение, соответствующее состоянию блокировки планетарной передачи, в результате чего нагнетательная линия 28 соединяется с каналами 32 и 35. При этом цилиндры 8 и 12 также соединяются с нагнетательной линией 28.
Благодаря положительной гидравлической обратной связи, выполненной через канал 35, управляющее звено 33 имеет релейную характеристику при подаче сигналов на включение или блокирование планетарной передачи. При такой характеристике повторное включение планетарной передачи будет происходить при более низкой частоте вращения n2, когда давление масла в полости 36 снизится до значения Р2.
Следовательно, включение блокировки планетарной передачи и повторное включение в работу планетарной передачи происходит с гистерезисом по частоте вращения, равной n1-n2.
Исполнительный электромагнитный клапан 37 также соединен с нагнетательной линией 28, а клапан 38 - с гидробаком 27.
Обмотки электромагнитов 46 и 47 исполнительных клапанов 37 и 38 соединены соответственно с анодами тиристоров 48 и 49, катоды которых через электрические цепи 50 и 51 соединены между собой. Через диод 52 катоды тиристоров 48 и 49 соединены с датчиком 17 выключения сцепления и с входной цепью 53 таймера 54. Анод тиристора 48 через дополнительный диод 55 и, например, стабилетрон 56 также соединен с управляющим электродом тиристора 49. В свою очередь, анод тиристора 49 через дополнительный диод 57 и стабилитрон 58 соединен с управляющим электродом тиристора 48.
Трансмиссия также содержит гидравлически управляемый электрический переключатель 59, гидравлически соединенный с управляющим звеном 33 и с каналом 32. Подвижный контакт 60 переключателя 59 через резистор 61 соединен с "плюсом" источника электропитания 62, например аккумулятором. Подвижный контакт 60 также соединен с датчиком 23 коробки передач 20. Переключаемые электрические цепи 63 и 64 соединены с диодами 57 и 55.
Выходная цепь 65 таймера 54 соединена с катодами тиристоров 48 и 49, а цепью 66 таймер соединен с "плюсом" источника электропитания 62.
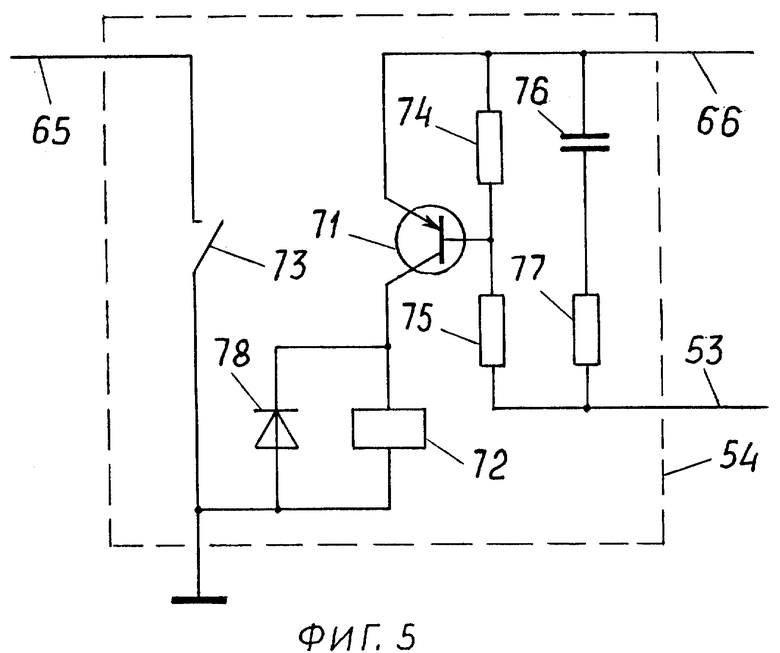
Резисторы 67 и 68 предназначены для стабилизации работы тиристоров 48 и 49. Диоды 69 и 70 введены для защиты тиристоров 48 и 49 от ЭДС самоиндукции на обмотках электромагнитов 46 и 47. Таймер 54 содержит, например, транзистор 71 /фиг.5/, нагрузкой которого является электромеханическое реле с обмоткой 72 и контактами 73.
База транзистора 71 через делитель, содержащий резисторы 74 и 75, соединена с входной цепью 53 таймера 54.
Параллельно резисторам 74 и 75 включены конденсатор 76 и резистор 77. Для защиты транзистора от ЭДС самоиндукции к обмотке 72 реле подключен диод 78.
Перед троганием транспортной машины ее двигатель работает на малых частотах вращения n<n2, поэтому в трансмиссии включена планетарная передача 2 с передаточным числом UП.
Так как контакты 24 датчика 23 замкнуты, то подвижный контакт 60 переключателя 59 отключен от источника электропитания 62 и соединен с массой.
При нажатии педали 14 и полном выключении сцепления 10 контакты датчика 17 замыкаются, соединяя катоды тиристоров 48 и 49 через диод 52 с массой. В связи с тем, что при этом от переключателя 59 на управляющие электроды тиристоров 48 и 49 не поступает запускающий сигнал, они остаются в закрытом состоянии.
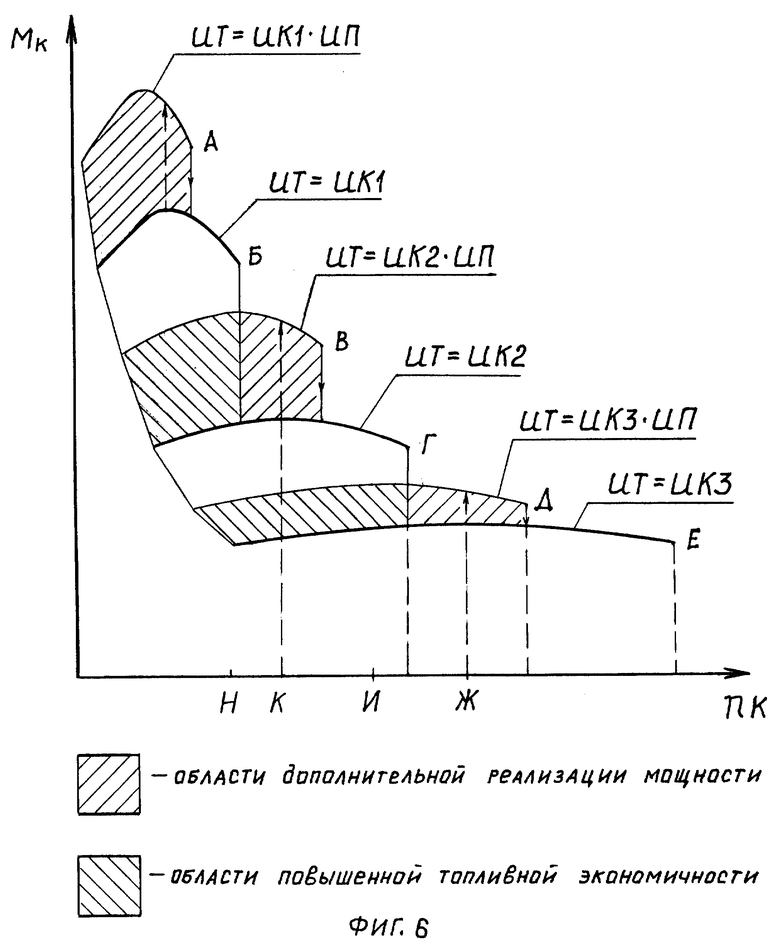
После включения первой ступени в коробке передач общее передаточное число в трансмиссии будет UT=UK1·UП.
Отпуская педаль 14, водитель плавно включает сцепление 10, что приводит к троганию транспортной машины с места. Первый этап разгона транспортной машины /до точки А, фиг.6/ происходит в соответствии с тяговой характеристикой при передаточном числе трансмиссии UT=UK1·UП, где Мк - крутящий момент на выходном валу 22 коробки передач 20, a nK - частота вращения этого вала.
В точке А частота вращения вала двигателя n=n1, поэтому по сигналу от управляющего звена 33 происходит блокировка планетарной передачи 2. При этом передаточное число трансмиссии становится равным UT=UK1, а подвижный контакт 60 электрического переключателя 59 перебрасывается вверх, соединяясь с электрической цепью 64.
При передаточном числе UK1 происходит дальнейший разгон транпортной машины до точки Б, когда водитель выключит сцепление 10, что приводит к замыканию контактов датчика 17, и выполняет переключение на вторую ступень коробки передач с передаточным числом UK2.
Как только водитель включит вторую ступень, в коробке передач происходит размыкание контактов 24 датчика 23.
Поэтому через электрическую цепь 64 и стабилитрон 56 на управляющий электрод тиристора 49 подается запускающий сигнал, приводящий к открытию тиристора 49, управляющего работой исполнительного электромагнитного клапана 38. Через электрическую цепь 53 также происходит подключение таймера 54.
В таймере 54 контакты 73 реле с обмоткой 72 замыкаются, а конденсатор 76 быстро заряжается через резистор 77. Срабатывает исполнительный электромагнитный клапан 38, в результате чего полость 36 управляющего звена 33 соединяется с гидробаком, что приводит к принудительному включению планетарной передачи. При этом после открытия тиристора 49 через диод 57 также происходит блокировка на массу управляющего электрода тиристора 48.
Процесс срабатывания исполнительного электромагнитного клапана 38, управляющего звена 33 и сброс давления в каналах 32 и 35 занимает определенный интервал времени Ти. Поэтому, когда подвижный контакт 60 электрического переключателя 59 перебросится вниз и через электрическую цепь 63 подаст запускающий сигнал на тиристор 48, его управляющий электрод уже будет заблокированным и тиристор 48 остается в закрытом состоянии.
В процессе последующего включения сцепления происходит размыкание контактов датчика 17, после чего начинается разряд конденсатора 76. Часть тока разряда конденсатора 76 проходит через эмиттер и базу транзистора 71. Поэтому в течение заданного времени задержки Тз контакты 73 таймера 54 остаются замкнутыми. При этом время задержки Тз выбрано больше реального времени включения сцепления.
Происходит дальнейший разгон транспортной машины до точки В при передаточном числе в трансмиссии UТ=UK2·UП /фиг.6/. В точке В частота вращения вала двигателя опять достигает n=n1, поэтому управляющее звено 33 подает сигнал на блокировку планетарной передачи. Следовательно, дальнейший разгон транспортной машины до точки Г происходит при передаточном числе трансмиссии UT=UK2. На этом режиме подвижный контакт 60 перебрасывается вверх, соединяясь с электрической цепью 64.
В точке Г водитель выключает сцепление и включает третью ступень коробки передач с передаточным числом UK3.
Как только замыкаются контакты датчика 17 выключения сцепления, через электрическую цепь 64 происходит открытие тиристора 49 и последующее включение планетарной передачи, как это ранее было описано. После включения сцепления дальнейший разгон транспортной машины до точки Д происходит при передаточном числе трансмиссии UT=UК3·UП.
В точке Д управляющее звено автоматически производит блокировку планетарной передачи, и до точки Е разгон транспортной машины будет происходить на третьей ступени коробки передач с передаточным числом UK3. При этом подвижный контакт 60 перебрасывается вверх и соединяется с электрической цепью 64.
В процессе переключения ступеней, например со ступени UK2 на ступень UK3, в зависимости от конструктивного выполнения привода датчика 23 возможно в нейтрали временное замыкание контактов 24. Однако это не оказывает влияния на работу устройства управления, т.к. тиристор 49 /48/ открывается в момент замыкания контактов 17 датчика выключения сцепления и сохраняет это состояние в течение времени задержки Тз, т.е. до размыкания контактов 73 таймера 54.
При возрастании дорожного сопротивления частота вращения nК выходного вала 22 коробки передач 20 снижается до точки Ж /фиг.6/, что соответствует частоте вращения двигателя n2 /фиг.4/. Управляющее звено 33 автоматически включает планетарную передачу, и передаточное число трансмиссии увеличивается до значения UT=UK3·UП, т.е. происходит переход на другую тяговую характеристику. Подвижный контакт 60 электрического переключателя 59 соединяется с электрической цепью 63.
При дальнейшем падении частоты nК, например до точки И, и соответствующем снижении скорости транспортной машины водитель выключает сцепление, выключает ступень UK3 и включает ступень UK2. Как только замкнутся контакты датчика 17 выключения сцепления, через цепь 63 на тиристор 48 будет подан запускающий сигнал, что приведет к переключению исполнительного электромагнитного клапана 37 и, соответственно, к переключению управляющего звена 33 на режим блокировки планетарной передачи. Тиристор 49 при этом будет заблокирован через диод 55.
Аналогично при падении частоты nK до точки К, когда частота вращения n снизится до n2, произойдет автоматическое включение планетарной передачи. При дальнейшем падении nK, например до точки Н, водитель произведет переключение на ступень UK1 с автоматически включаемой блокировкой планетарной передачи.
Таким образом в устройстве управления трансмиссией по фиг.2 сигнал, поступающий от управляющего звена 33 на электрический переключатель 59, характеризует состояние планетарной передачи. При этом подвижный контакт 60 электрического переключателя 59 соединяется с электрической цепью /63, 64/ через которую на один из тиристоров /48, 49/ при выключенном сцеплении будет подан запускающий сигнал на принудительное переключение управляющего звена в другое устойчивое состояние.
Открытие этого тиристора, приводящее к переключению соответствующего исполнительного электромагнитного клапана, переводит управляющее звено 33 в другое устойчивое состояние, что характеризует первый формируемый сигнал.
Одновременно выполняемое открытие запускаемого тиристора через диод /55, 57/ производит блокирование другого тиристора от запуска, что является вторым формируемым сигналом.
После срабатывания исполнительного электромагнитного клапана, переключения управляющего звена 33 в другое устойчивое состояние и срабатывания электрического переключателя 59, на что уходит определенное время, подвижный контакт 60 переводится на запуск другого тиристора. Но этот запуск не происходит, так как другой тиристор ранее был уже заблокирован вторым формируемым сигналом.
Следовательно, работа устройства управления /фиг.2/ основана на срабатывании электрического переключателя 59 с задержкой по отношению к началу действия второго формируемого сигнала.
Например, в точке Г при движении транспортной машины на ступени UК2 /фиг.6/ включена блокировка планетарной передачи, а подвижный контакт 60 соединен с электрической цепью 64, через которую при выключенном сцеплении и переключении на ступень UK3 происходит запуск тиристора 49 /первый формируемый сигнал/.
Тиристор 48 при этом блокируется вторым формируемым сигналом через диод 57. В результате при выключении сцепления и включении ступени UK3 происходит также включение планетарной передачи.
Наоборот, при частоте nК, соответствующей точке И, движение транспортной машины происходит на ступени UK3 с включенной планетарной передачей.
Подвижный контакт 60 электрического переключателя 59 при этом соединен с электрической цепью 63, через которую при выключенном сцеплении произойдет запуск тиристора 48 /первый формируемый сигнал/. Тиристор 49 при этом блокируется вторым формируемым сигналом. Поэтому при выключении сцепления и переключении на ступень UK2 со ступени UK3 произойдет блокировка планетарной передачи.
При включении ступени /UK1, UR/, предназначенной для трогания с места транспортной машины, замкнутые контакты 24 датчика 23 блокируют подачу запускающих сигналов на тиристоры 48 и 49 /это третий формируемый сигнал/.
В этом случае управление планетарной передачей осуществлется от управляющего звена 33 только в функции частоты вращения n вала планетарной передачи.
Поэтому перед троганием с места транспортной машины всегда будет включаться планетарная передача с передаточным числом UП. Это облегчает процесс трогания транспортной машины и уменьшает работу буксования в сцеплении.
Изложенное показывает, что новый способ управления и устройство для его осуществления обеспечивают реализацию в трансмиссии транспортной машины удвоенного числа ступеней по сравнению с числом ступеней коробки передач, переключаемых водителем, что улучшает тягово-динамические и топливно-экономические характеристики транспортной машины.
При этом автоматичекое включение планетарной передачи и ее блокировка выполняются фрикционными муфтой и тормозом без разрыва потока мощности, т.е. под нагрузкой.
В устройстве управления трансмиссией по фиг.2 при любом числе ступеней коробки передач необходим только один концевой датчик 23 с контактами 24. В датчике 17 выключения сцепления также используется только одна пара контактов. В связи с этим данное устройство управления /фиг.2/ существенно надежнее известного аналога.
Использование для включения планетарной передачи тормоза 6 нормально замкнутого типа обеспечивает получение режимов торможения двигателем на стоянках и запуска двигателя буксированием транспортной машины без применения муфты свободного хода, что упрощает трансмиссию и повышает ее надежность.
Датчик выключения сцепления 17 в зависимости от привода сцепления может также иметь управление по ходу или по силе на педали 14.
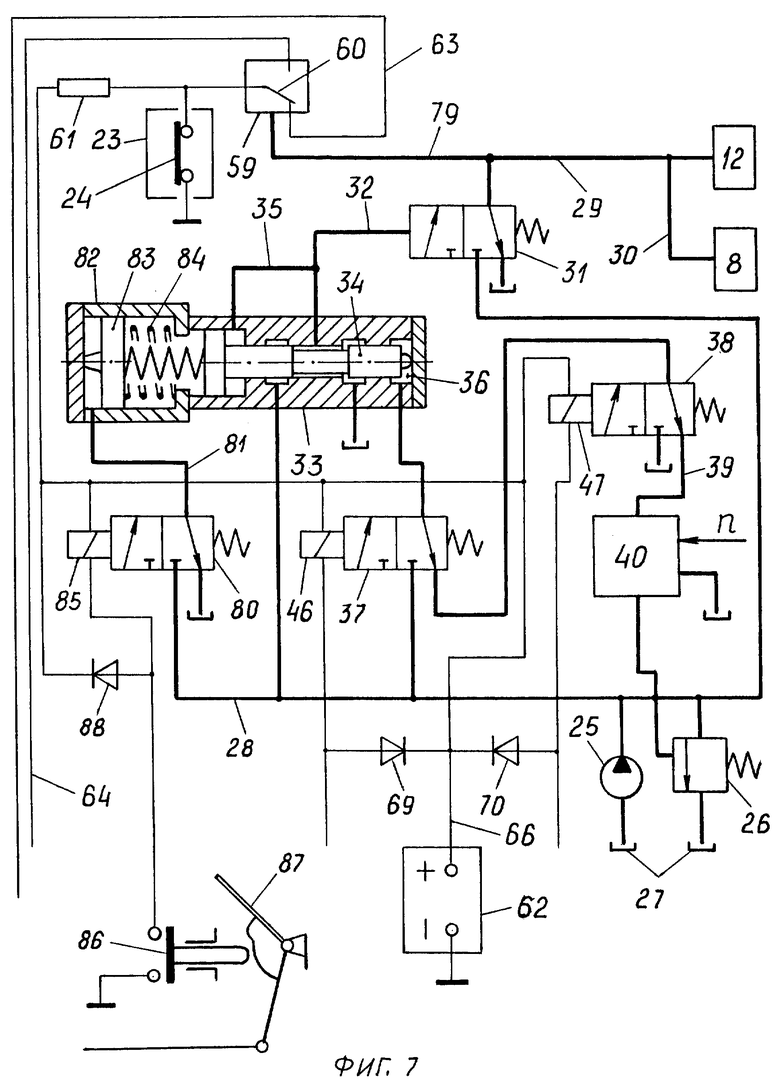
В устройстве управления трансмиссией /фиг.7/ гидравлически управляемый электрический переключатель 59 каналом 79 соединен с каналом 29, соединяющим переключающий клапан 31 с цилиндром 12 включения фрикционной муфты 11 блокировки планетарной передачи.
Кроме того, устройство управления дополнительно содержит корректирующий электромагнитный клапан 80, который каналом 81 соединен с гидроцилиндром 82, установленным на управляющем звене 33. Поршень 83 гидроцилиндра 82 упирается в пружину золотника 34 управляющего звена 33, а также поджат пружиной 84, расположенной внутри этого гидроцилиндра. Корректирующий электромагнитный клапан 80 также соединен с нагнетательной линией 28 и с гидробаком 27.
Обмотка 85 электромагнита электромагнитного клапана 80 соединена с электрическим датчиком 86, например, электрическим выключателем, управляемым от педали 87 подачи топлива в двигатель транспортной машины. Диод 88 введен для защиты электрического датчика 86 от ЭДС самоиндукции на обмотке 85 электромагнита.
Переключающий клапан 31 повторяет сигналы управляющего звена 33 с некоторой задержкой по времени. Благодаря этому увеличивается интервал Ти между подачей второго формируемого сигнала и моментом переброса подвижного контакта 60 электрического переключателя 59, что повышает надежность работы устройства управления по фиг.7.
При малых и средних нажатиях педали 87 подачи топлива в двигатель транспортной машины устройство управления по фиг.7 работает аналогично с ранее описанным устройством по фиг.2. При больших нажатиях педали 87, увеличивающих нагрузку двигателя транспортной машины, происходит срабатывание электрического датчика 86. Его контакты замыкаются, подключая к электропитанию электромагнит 85 корректирующего электромагнитного клапана 80. Клапан 80 срабатывает, соединяя нагнетательную линию 28 с гидроцилиндром 82. Под действием давления Рн поршень 83 перемещается вправо, дополнительно поджимая пружину золотника 34. Это приводит к включению блокировки планетарной передачи управляющим звеном 33 при более высокой частоте вращения n10 /фиг.4/, когда давление масла в полости 36 будет равно Р10. Окончание режима блокировки и повторное включение планетарной передачи при этом будет происходить при частоте n20, когда давление в полости 36 снизится до Р20.
Введение дополнительного сигнала на управляющее звено 33 от датчика 86, соответствующего увеличенной нагрузке двигателя, позволяет улучшить динамические показатели транспортной машины.
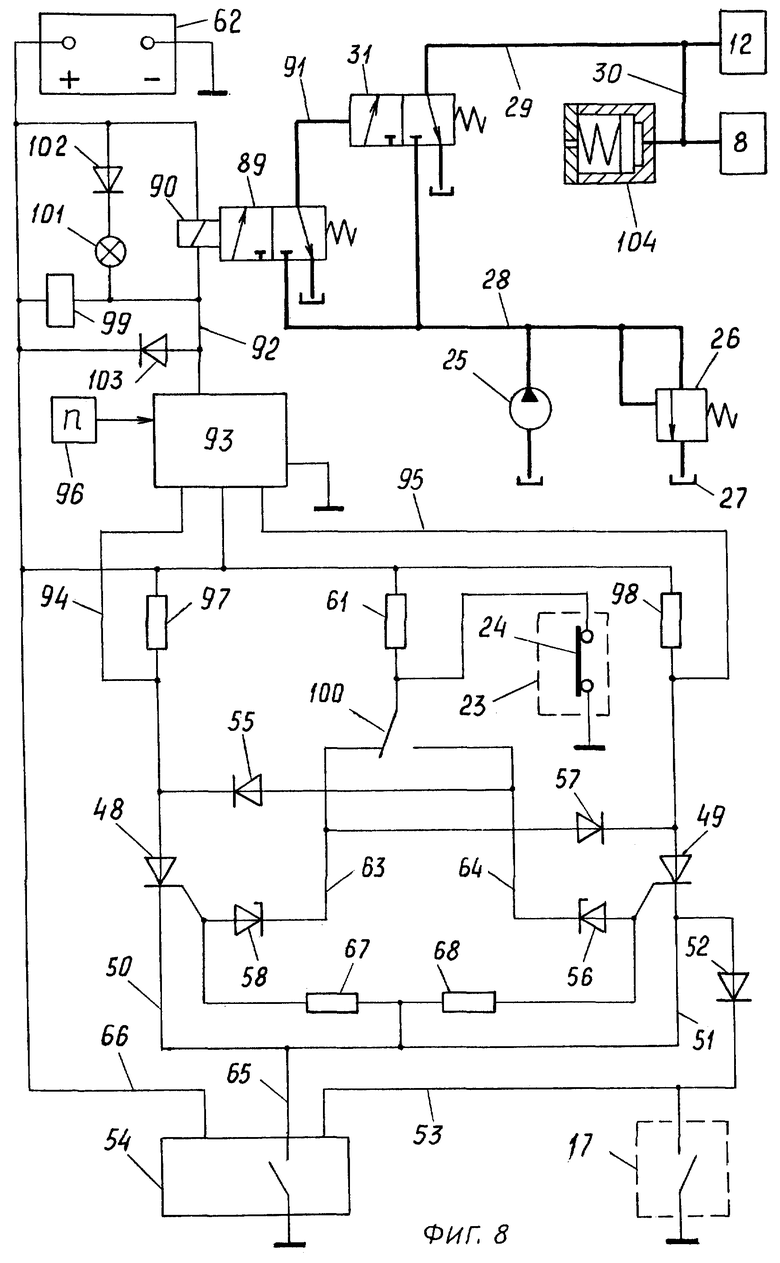
Устройство управления трансмиссией /фиг.8/ содержит электромагнитный клапан-пилот 89, переключаемый с помощью электромагнита 90. Каналом 91 электромагнитный клапан-пилот 89 соединен с переключающим клапаном 31.
Электромагнитный клапан-пилот 89 также соединен гидравлически с нагнетательной линией 28 и гидробаком 27.
Электрической цепью 92 электромагнит 90 соединен с управляющим звеном 93, выполненным в виде электронного реле, имеющим два дополнительных входа 94 и 95 для подачи первого формируемого сигнала от тиристора 48 или тиристора 49.
Кроме того, управляющее звено 93 соединено с датчиком 96 частоты вращения вала планетарной передачи.
В устройстве управления по фиг.8 нагрузкой тиристоров 48 и 49 являются резисторы 97 и 98.
Параллельно обмотке электромагнита 90 присоединена обмотка 99 электромеханического реле, содержащего перекидной контакт 100, выполняющего функцию электрического переключателя, управляемого по сигналу управляющего звена 93.
В устройстве также предусмотрен световой индикатор 101, например, в виде электрической лампы.
Диоды 102 и 103 предназначены для защиты от ЭДС самоиндукции управляющего звена 93 и светового индикатора 101. Для более плавного включения фрикционного тормоза и фрикционной муфты 11 предусмотрен соединенный каналом с цилиндрами 12 и 8 аккумулятор давления 104.
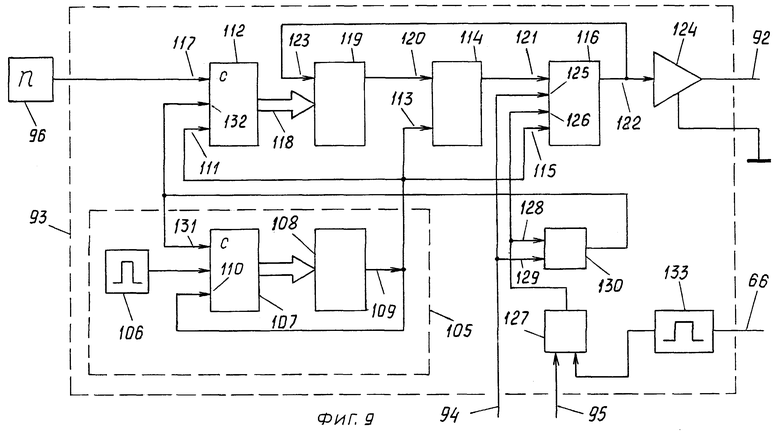
Управляющее звено 93 /фиг.9/ снабжено, например, блоком подачи тактовых импульсов 105, содержащим генератор прямоугольных импульсов 106, подаваемых на счетчик 107 этого блока, а выход блока соединен с дешифратором 108. Выход 109 дешифратора 108 является выходом блока подачи тактовых импульсов с интервалом, например, 0,5 с. Выход 109 соединен с входом 110 счетчика 107, с первым входом 111 счетчика 112, с первым входом 113 первого триггера 114 /например, типа JK/ регистрации достижения заданной частоты n1 блокировки или частоты n2 включения планетарной передачи и с первым входом 115 второго триггера 116.
Через второй вход 117 счетчик 112 соединен с датчиком 96 частоты вращения n вала планетарной передачи, информация от которого подается в виде периодических импульсов с частотой, пропорциональной частоте вращения этого вала планетарной передачи.
Выход счетчика 112 соединен с первым входом 118 дешифратора 119, а выход дешифратора 119 соединен со вторым входом 120 первого триггера 114. Выход первого триггера 114 соединен со вторым входом 121 второго триггера 116, выход 122 которого соединен с входом управления 123 дешифратора 119 и с усилителем мощности 124.
Усилитель мощности 124 через электрическую цепь 92 соединен с обмоткой электромагнита 90 электромагнитного клапана-пилота 89 /фиг.8/. Третий вход 125 второго триггера 116 соединен с входом 94. Четвертый вход 126 второго триггера 116, например, через ячейку ИЛИ 127 соединен с входом 95.
Входы 125 и 126 второго триггера 116 через электрические цепи 128 и 129 соединены также с ячейкой ИЛИ 130, выход которой управляет входом обнуления 131 счетчика 107 блока подачи тактовых импульсов и с входом обнуления 132 счетчика 112.
"Плюс" электропитания 66 соединен с блоком обнуления 133, выход которого соединен с другим входом ячейки 127.
При подаче электропитания срабатывает блок обнуления 133 и выдает один импульс, который через ячейку 127 подается на вход 126 второго триггера 116 и обнуляет его, т.е. приводит в исходное рабочее состояние.
Одновременно этот импульс через ячейку ИЛИ 130 подается на вход 131 счетчика 107 и вход 132 счетчика 112, приводя их к обнулению. Через вход 109 блока подачи тактовых импульсов 105 и вход 113 обнуляется первый триггер 114.
После прекращения действия импульса блока обнуления 133 на выходе 109 блока 105 периодически с интервалом Тт вырабатываются короткие тактовые импульсы.
За временной интервал Тт происходит накопление импульсов с датчика 96 на счетчике 112. Количество импульсов, накопленное за интервал Тт, определяет текущее значение частоты вращения n вала планетарной передачи. К моменту окончания интервала Тт состояние триггера 114 характеризует превышение или непревышение заданного порога n1, причем исходное состояние триггера 114 соответствует непревышению этого порога.
Величины отмеченных порогов, соответствующие частотам вращения n1 и n2, заложены в дешифраторе 119.
С каждым последующим интервалом Тт начинается новый цикл измерения частоты n. В случае, если триггер 114 находился в исходном состоянии, а частота n>n1, то с дешифратора 119 на вход 120 первого триггера 114 поступает сигнал, который переводит триггер 114 в другое устойчивое состояние /т.е. триггер переключается/ и на вход 121 второго триггера 116 подается переключающий сигнал.
В момент поступления последующего тактового импульса на вход 115 и наличия ранее поступившего сигнала на вход 121 происходит переключение триггера 116 и установка исходного состояния на триггере 114, т.е. передача информации с триггера 114 на триггер 116 происходит с некоторой задержкой, не превышающей время интервала Тт.
Сигнал, образованный на выходе 122 триггера 116, в виде обратной связи подается на вход 123 дешифратора 119, который устанавливается на частоту n2. Одновременно этот сигнал с выхода 122 подается и на усилитель мощности 124, что приводит к срабатыванию электромагнитного клапана-пилота 89 и к включению блокировки планетарной передачи, как это ранее было изложено.
Далее, при n>n2 триггер 116 будет постоянно находиться в положении включения блокировки планетарной передачи.
Если частота n снизится, то при n<n2 на входе 121 триггера 116 будет отсутствовать переключающий сигнал, поэтому при последующем поступлении тактового импульса на вход 115 триггер 116 перебросится в исходное /нулевое/ состояние, что приведет к отключению блокировки, повторному включению планетарной передачи с передаточным числом UП и переключению дешифратора 123 на порог, соответствующий частоте n1.
При поступлении на управляющее звено 93 сигнала с анода тиристора 48 через электрическую цепь 94 или сигнала с анода тиристора 49 через электрическую цепь 95 происходит принудительное соответствующее переключение триггера 116. На время действия указанных сигналов через ячейку 130 производится блокировка счетчика 112 и блока 105 подачи тактовых импульсов.
Введение аккумулятора давления 104 обеспечивает плавность процесса переключений в планетарной передаче трансмиссии, выполняемых по сигналам управляющего звена 93.
В остальном устройство управления по фиг.8 работает аналогично с ранее описанным устройством по фиг.2. Поэтому тяговые характеристики транспортной машины с устройством управления по фиг.8 будут соответствовать графику на фиг.6.
В схеме управления по фиг.8 лампа 101 загорается при каждом включении блокировки планетарной передачи. Это позволяет водителю транспортной машины лучше ориентироваться с определением момента переключения на более высокую ступень в коробке передач 20.
Применение управляющего звена 93 в виде электронного реле существенно уменьшает металлоемкость трансмиссии транспортной машины. Частотоуправляемое электронное реле 93 может иметь и другую структурную схему, но оно должно содержать дополнительные входы 94 и 95 для избирательной подачи первого формируемого сигнала.
Кинематическая схема трансмиссии транспортной машины /фиг.10/ содержит датчик скорости 134, управляемый от датчика 135 частоты nК вращения вала 22 коробки передач 20. Датчик скорости 134 имеет нормально замкнутую электрическую цепь 136, выключаемую /разрываемую/ при достижении выходным валом 22 коробки передач определенной частоты вращения nК1 и, соответственно, достижении определенной начальной скорости транспортной машины Vтр, при которой закончен процесс трогания транспортной машины с места с полным включением сцепления.
Для различных транспортных машин ориентировочно указанная начальная скорость Vтр=1-3 км/ч.
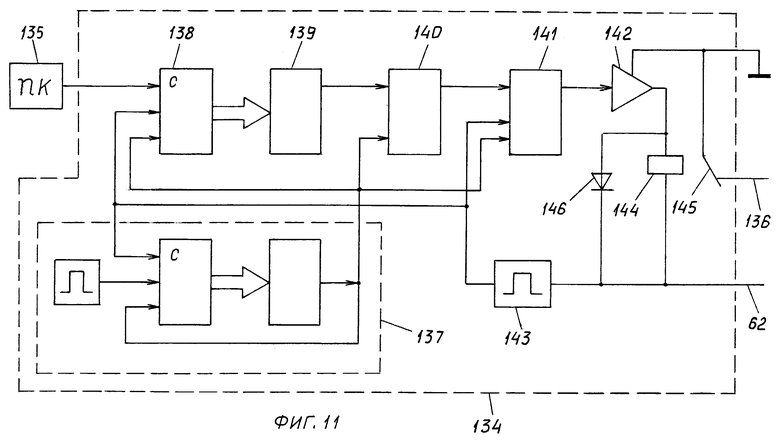
Датчик скорости 134 /фиг.2/ выполнен, например, как электронное реле, управляемое от скорости транспортной машины. Он содержит блок подачи тактовых импульсов 137, счетчик 138, получающий сигнал от датчика 135 частоты вращения выходного вала 22, например, в виде периодических электрических импульсов.
В датчик скорости 134 также входят дешифратор 139, первый триггер 140 регистрации достижения заданной частоты вращения nK1, второй триггер 141, усилитель мощности 142 и блок обнуления 143.
Выход усилителя мощности 142 соединен, например, с электромеханическим реле, имеющим обмотку 144 и нормально замкнутый контакт 145. Диод 146 предназначен для защиты усилителя мощности 142 от ЭДС самоиндукции на обмотке 144 реле. Структурная схема датчика скорости 134 соответствует структурной схеме электронного реле 93 по фиг.9 при управлении только от частоты вращения вала планетарной передачи. Следовательно, в датчике скорости 134 формирование сигнала на выходе усилителя мощности 142 при достижении заданной частоты nK1 происходит аналогично со схемой по фиг.9, что ранее было рассмотрено.
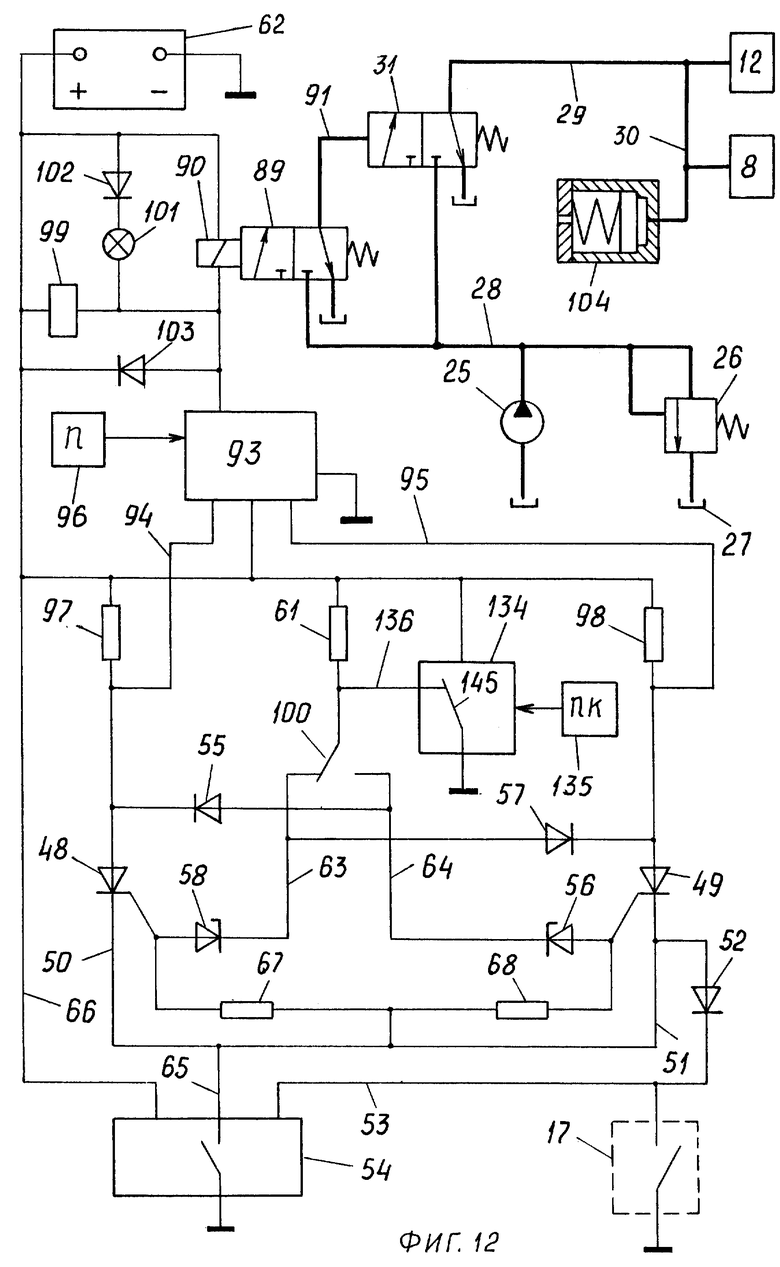
Схема управления трансмиссией по фиг.10, приведенная на фиг.12, содержит датчик скорости 134, электрическая цепь 136 которого соединена с перекидным контактом 100, являющимся электрическим переключателем, управляемым от сигнала управляющего звена 93.
При трогании с места транспортной машины, например, на первой ступени UK1 в коробке передач 20 перекидной контакт 100 электрического переключателя через электрическую цепь 136 и нормально замкнутые контакты 145 соединен с массой. Поэтому при выключении сцепления тиристоры 48 и 49 оказываются заблокированными. Следовательно, трогание транспортной машины с места возможно только при включенной планетарной передаче, т.е. при передаточном числе в трансмиссии UT=UK1·UП.
В процессе дальнейшего разгона транспортной машины и соответствующего возрастания частоты вращения выходного вала 22, например, до точки Н /фиг.6/, достигается заданная скорость Vтр, в результате чего происходит размыкание контактов 145 датчика скорости 134. С этого момента времени управляемый по сигналу управляющего звена 93 электрический переключатель с перекидным контактом 100 при каждом выключении сцепления 10 будет подавать на один из тиристоров 48 /49/ запускающий сигнал, как это было рассмотрено в устройствах управления по фиг.2 и фиг.8.
Таким образом, датчик скорости 134 при трогании транспортной машины с места до достижения ею заданной скорости Vтр формирует третий сигнал, предотвращающий перевод управляющего звена 93 в состояние блокировки планетарной передачи при выключении сцепления.
Устройство управления трансмиссией по фиг.10 не содержит концевых выключателей, управляемых от механизма переключения ступеней коробки передач, что делает его более надежным по сравнению с аналогами. Кроме того, схема управления по фиг.12 имеет преимущества, например, при использовании на грузовом автомобиле с многоступенчатой коробкой передач, трогание с места которого в зависимости от нагрузки может выполняться не только на первой ступени коробки передач.
Изложенное показывает, что разработан новый способ управления механической трансмиссией транспортной машины, например автомобиля, обеспечивающий получение удвоенного числа ступеней по сравнению с числом ступеней коробки передач, управляемой водителем. Благодаря этому улучшаются тягово-динамические и топливно-экономические характеристики транспортной машины, а управление трансмиссией упрощается.
При этом включение планетарной передачи и ее блокировка выполняются фрикционными муфтой и тормозом автоматически без разрыва потока мощности.
В соответствии с новым способом управления разработаны гидравлическое и электронное устройства управления трансмиссией, имеющие существенно более простые датчики, чем у известного аналога, что значительно повышает надежность трансмиссии.
Применение тормоза нормально замкнутого типа обеспечивает получение режимов торможения двигателем транспортной машины на стоянках и запуска двигателя буксированием машины, что бывает необходимо в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ДОРОЖНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2130839C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2077997C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 2010 |
|
RU2438058C1 |
| ГИДРОПЕРЕДАЧА ТРАНСПОРТНОЙ МАШИНЫ | 2000 |
|
RU2185968C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЛАНЕТАРНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2012 |
|
RU2518788C2 |
| Трансмиссия транспортного средства | 1986 |
|
SU1414670A1 |
| ГИДРОПЕРЕДАЧА ТРАНСПОРТНОЙ МАШИНЫ | 2012 |
|
RU2545245C2 |
| Механическая трансмиссия автомобиля | 2019 |
|
RU2719746C1 |
| ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ ТРАНСМИССИИ | 1996 |
|
RU2130664C1 |
| Гидромеханическая трансмиссия транспортного средства | 1984 |
|
SU1235766A2 |

Изобретение относится к транспортному машиностроению. Способ управления трансмиссией транспортной машины, содержащей включаемую и блокируемую от сигналов управляющего звена планетарную передачу 2, сцепление 10 и ступенчатую коробку передач 20, заключается в преобразовании сигнала частоты вращения одного из валов планетарной передачи 2 в два устойчивых состояния управляющего звена, соответственно включения и блокировки передачи 2, а также снятии сигнала выключения сцепления. Первый сигнал формируют при выключенном сцеплении 10, подают на управляющее звено и переводят его в другое устойчивое состояние. Второй сигнал формируют для предотвращения перехода управляющего звена в исходное устойчивое состояние на время действия первого сигнала. При этом первый сигнал действует заданное время и после включения сцепления. Способ управления предусматривает формирование третьего сигнала, предотвращающего переход управляющего звена в состояние блокировки передачи 2 при трогании с места транспортной машины. Технический результат - улучшены тягово-динамические и топливно-экономические характеристики транспортной машины и повышена ее надежность. 2 с. и 3 з.п.ф-лы, 12 ил.
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2077997C1 |
| Трансмиссия транспортного средства | 1986 |
|
SU1414670A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5267492 А, 07.12.1993. | |||

