Изобретение относится к транспортному машиностроению, а именно к транспортным средствам, приводимым в движение мускульной силой человека, и может быть использовано в качестве компактного коллективного и индивидуального транспортного средства.
Известно транспортное средство (см. патент РФ №2094288 С1, В 62 М 1/20, 1999 г.), содержащее раму, заднее ведущее колесо, переднее колесо, руль, упругие элементы, расположенные симметрично по обе стороны рамы и имеющие опорную площадку. Упругие элементы соединены с задним ведущим колесом с помощью передаточного устройства.
Недостатками известного устройства являются применение в приводе упругих элементов, работа которых зависит от веса человека и требует применения дополнительных ограничителей прогиба и компенсаторов, сложность передачи крутящего момента ведущему колесу.
Известен также самокат (см. патент РФ №2009941 С1, В 62 М 1/00, 1994 г.), содержащий основание, опирающееся на по крайней мере одно ведущее колесо, трансмиссию с обгонными механизмами, выполненную в виде цепной передачи для преобразования возвратно-поступательного движения во вращательное движение ведущих колес, с размещенными на ней опорными площадками для ног с установленными на них роликами для движения по основанию, а трансмиссия расположена параллельно горизонтальной плоскости.
Недостаток самоката заключается в неудобном и ненадежном приводе с нерациональной техникой педалирования.
Из известных аналогичных транспортных средств наиболее близким по технической сущности является легковой веломобиль, приводимый в движение мускульной силой ног, спины, рук, весом водителя и груза (см. патент РФ №2124450 С1, В 62 М 1/04, 1999 г.). Веломобиль содержит переднее ведомое колесо, руль, раму с двумя задними колесами, расположенными жестко на одной оси, привод и правый и левый приводные рычаги, выполненные с педальной платформой по всей длине для возможности перемещения по ней водителя, соединенные с коромыслом через шатуны и задними концами через втулку с осью задних ведущих колес и с планетарной передачей. На оси задних колес расположена подвижная коронная шестерня, являющаяся одновременно корпусом передачи и выполненная с наружными косыми и внутренними прямыми зубьями, которыми она соединена с четырьмя сателлитами через малую шестерню, а большой шестерней сателлиты соединены через 4 промежуточных сателлита с солнечной шестерней, установленной на шлицах оси задних колес. На концах рычагов закреплены подпружиненные собачки, входящие в зацепление с наружными косыми зубьями коронной шестерни.
Недостатками известной конструкции являются сложность и ненадежность привода, а также применение 3-колесной схемы.
Задача настоящего изобретения заключается в создании компактного многоместного транспортного средства, позволяющего снижать энергозатраты на движение за счет использования веса тела всего экипажа с получением равномерного крутящего момента на ведущем колесе.
Поставленная задача достигается тем, что в самокате-экипаже, содержащем раму, несущую опоры для нескольких человек, заднее приводное и переднее управляемое колеса, руль, вспомогательный поручень, ножной привод и трансмиссию, образованную несколькими установленными последовательно преобразующими механизмами, цилиндрическими и конической передачами, связанными промежуточным валом, согласно изобретению установленные последовательно преобразующие механизмы выполнены в виде установленного в корпусе планетарного зубчатого механизма, имеющего переменное передаточное отношение и два центральных колеса, одно из которых закреплено, смещено относительно своей оси вращения и имеет некруглую форму, а другое выполнено составным и образовано несколькими зубчатыми колесами, которые закреплены на полых коаксиальных валах, образующих составной ведущий вал, на других концах которых жестко закреплены приводные рычаги, водило, являющееся ведомым, имеющее зубчатые венцы внешнего зацепления для передачи крутящего момента заднему колесу через зубчатые передачи и несущее оси 2-рядных сателлитов, находящихся в зацеплении с центральными колесами и обеспечивающими кинематическую связь каждого коаксиального вала с водилом, при этом находящиеся в зацеплении сателлиты и центральные колеса имеют одинаковые числа зубьев, а сателлиты, сопряженные с некруглым центральным колесом, имеют круглую форму и эксцентрично смещены относительно своих осей вращения на величину смещения некруглого центрального колеса.
Некруглое центральное колесо выполнено составным и образовано двумя некруглыми зубчатыми колесами, повернутыми относительно друг друга на фазовый угол, каждое из которых находится в зацеплении с группой сателлитов, обеспечивающих кинематическую связь каждого коаксиального вала с водилом.
Каждая опора для каждого члена экипажа состоит из неподвижной части, закрепленной на раме, для пяточной части стопы и подвижной педали для носочной части стопы, закрепленной на приводном рычаге и совершающей при работе колебательное движение.
Такое конструктивное выполнение самоката-экипажа обеспечит достижение заданного технического результата за счет соответствующих кинематических связей коаксиальных валов с закрепленными на них приводными рычагами с водилом планетарного механизма. Применение передачи с некруглым центральным колесом со средним значением передаточного отношения 1:1 обеспечивает циклически изменяющееся передаточное отношение планетарного механизма. Применение передаточного отношения 1:1 для второго составного центрального колеса и находящихся в зацеплении с ним сателлитов обеспечивает преобразование колебательного движения приводных рычагов и зубчатых колес, образующих второе составное центральное колесо и жестко связанных коаксиальными валами, относительно среднего положения, лежащего в плоскости опор, во вращательное движение водила. Число осей 2-рядных сателлитов и их положение определяет число коаксиальных валов, образующих составной выходной вал, число импульсов крутящих моментов, передаваемых водилу, и их фазовый сдвиг. Применение составного некруглого центрального колеса позволяет конструктивно решить задачу получения фазового сдвига импульсов 45° и менее для повышения равномерности крутящего момента на водило. Применение опор, состоящих из неподвижных частей, закрепленных на раме, и подвижных педалей позволяет использовать вес тела каждого члена экипажа для создания крутящего момента на приводном колесе путем его переноса с одной педали на другую. Наличие неподвижной части позволяет отдыхать при движении. Размещение на водило нескольких зубчатых венцов внешнего зацепления позволяет ступенчато изменять передаточное отношение трансмиссии от привода к приводному колесу.
Для пояснения изобретения ниже приводится конкретный пример выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
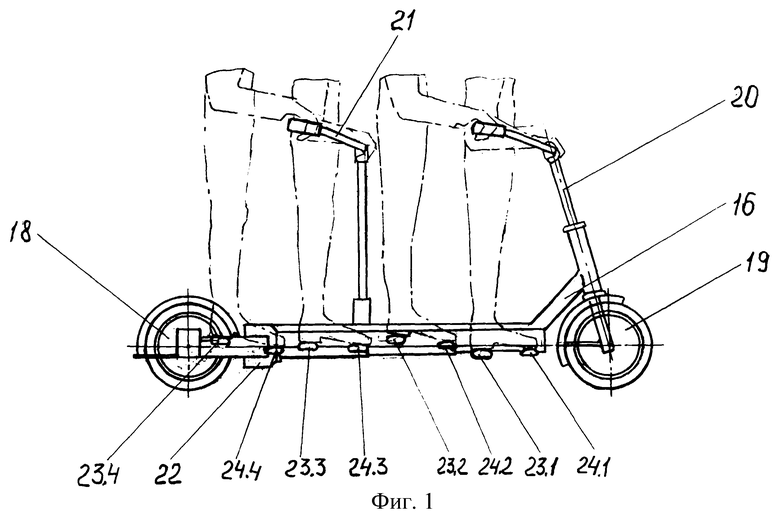
на фиг.1 изображен общий вид самоката-экипажа;
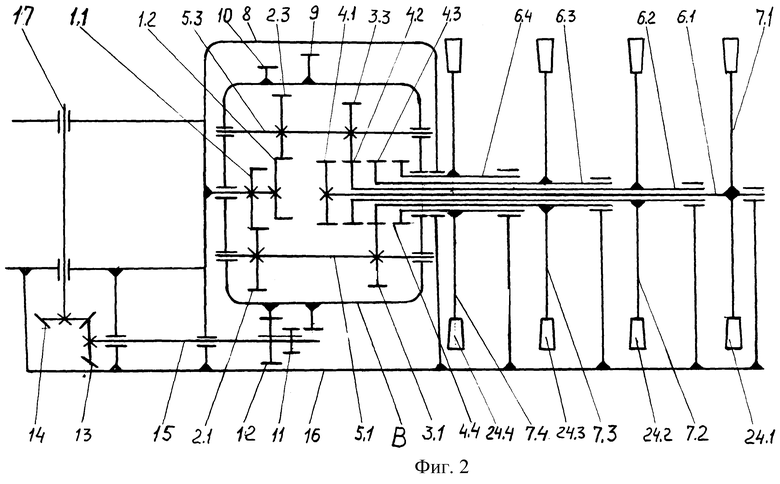
на фиг.2 изображена кинематическая схема трансмиссии;
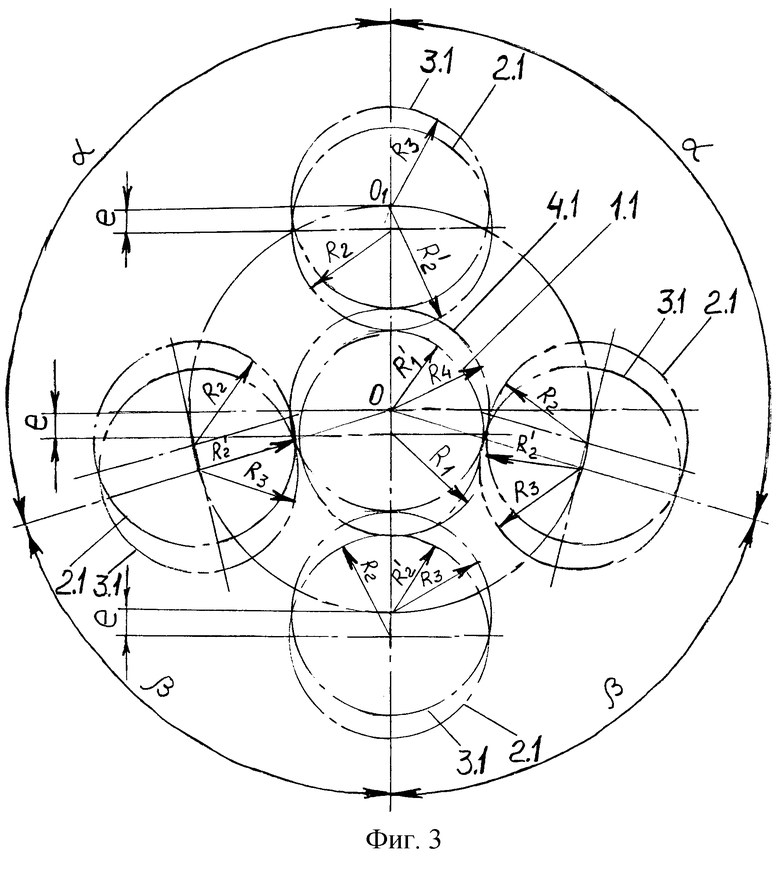
на фиг.3 изображены 4 экстремальных положения одного 2-рядного сателлита 2.1 и 3.1 относительно центральных колес 1.1 и 4.1;
на фиг.4 изображена схема положений начальных окружностей эксцентрично смещенных сателлитов относительно некруглых центральных колес для случая установки на водило четырех осей 2-рядных сателлитов.
Самокат-экипаж (фиг.1) содержит раму 16, несущую опоры 23.1, 23.2, 23.3, 23.4, приводное заднее колесо 18, переднее управляемое колесо 19, руль 20, вспомогательный поручень 21, трансмиссию 22, педали 24.1, 24.2, 24.3, 24.4.
Трансмиссия (фиг.2) содержит установленный на раме 16 планетарный механизм, имеющий корпус 8, закрепленные некруглые центральные колеса 1.1 и 1.2, образующие составное некруглое центральное колесо 1, зубчатые колеса 4.1, 4.2, 4.3, 4.4, образующие второе составное центральное колесо 4, жестко закрепленные на полых коаксиальных валах 6.1, 6.2, 6.3, 6.4, образующих составной ведущий вал, на других концах которых закреплены приводные рычаги 7.1, 7.2, 7.3, 7.4 с педалями 24.1, 24.2, 24.3, 24.4. На водило В планетарного механизма подвижно установлены оси 5.1, 5.2, 5.3, 5.4 2-рядных сателлитов 2.1 и 3.1, 2.2 и 3.2, 2.3 и 3.3, 2.4 и 3.4 (оси 5.2 и 5.4 с сателлитами условно не показаны) и закреплены зубчатые венцы 9 и 10, один их которых находится в зацеплении с блоком шестерен, образованных зубчатыми колесами 11 и 12, установленным на шлицах на промежуточном вале 15, на другом конце которого жестко закреплена коническая шестерня 13, находящаяся в зацеплении с установленным на приводном вале 17 заднего колеса зубчатым колесом 14.
Устройство работает следующим образом.
Начало движения самоката-экипажа из неподвижного состояния осуществляется его разгоном одним или несколькими членами экипажа до определенной скорости движения. При этом вращение заднего колеса 18 (фиг.1) через вал 17, конические шестерни 14 и 13, промежуточный вал 15 и одно из колес 11 или 12 блока шестерен через зубчатые венцы 9 или 10 передается водилу В планетарного механизма, которое через подвижно установленные на нем оси 51, 5.2, 5.3, 5.4 сообщает эксцентрично установленным круглым сателлитам 2.1, 2.2, 2.3, 2.4 движение обкатывания закрепленного составного некруглого центрального колеса, образованного зубчатыми колесами 1.1 и 1.2 (фиг.2). Обкатывание эксцентричными сателлитами некруглого смещенного центрального колеса вызывает их радиальные биения и, как следствие, неравномерное вращение их осей 5.1, 5.2, 5.3, 5.4 и жестко закрепленных на них сателлитов 3.1, 3.2, 3.3, 3.4 и находящихся в зацеплении с ними зубчатых колес 4.1, 4.2, 4.3, 4.4, образующих составное второе центральное колесо. На фиг.3 показаны возникающие при обкатывании 4 экстремальных положения начальных окружностей одного 2-рядного сателлита 2.1 и 3.1 относительно центральных колес 1.1 и 4.1.
Значение передаточного отношения планетарного механизма (при ω1=0) определяется по формуле

где ω1, ωв, ω4 - угловые скорости соответственно некруглого центрального колеса 1.1, водила В и центрального колеса 4.1;
z1, z2, z3, z4 - числа зубьев соответственно центрального колеса 1.1, сателлитов 2.1 и 3.1, центрального колеса 4.1.
При равенстве чисел зубьев находящихся в зацеплении колес и эксцентричном смещении центрального колеса 1.1 и сателлита 2.1 мгновенное значение передаточного отношения

где R
Соотношение  определяет мгновенное значение передаточного отношения и его знак.
определяет мгновенное значение передаточного отношения и его знак.
При 
 т.е. скорость центрального колеса ω4=0.
т.е. скорость центрального колеса ω4=0.
При  передаточное отношение положительно, направления вращения водила В и центрального колеса 4.1 одинаковы.
передаточное отношение положительно, направления вращения водила В и центрального колеса 4.1 одинаковы.
При  передаточное отношение отрицательно, направления вращения водила В и центрального колеса 4.1 различны.
передаточное отношение отрицательно, направления вращения водила В и центрального колеса 4.1 различны.
Мгновенные значения передаточных отношений имеют максимальные значения, когда разность мгновенных значений радиусов R
Для верхнего положения: R
Для нижнего положения: R
Для боковых положений: R
Поворот водила В и оси 5.1 с сателлитами 2.1 и 3 1 из бокового положения в верхнее на угол α вызывает ускоренное вращение центрального колеса 4.1 с положительным знаком до максимального значения. Поворот водила на угол ϕ из верхнего положения сопровождается уменьшением скорости вращения центрального колеса 4.1 до нуля. Дальнейший поворот водила на угол 2β сопровождается изменением знака на отрицательный и увеличением скорости вращения центрального колеса 4.1 до максимального значения в нижнем положении и уменьшением до нуля в боковом. Знакопеременное вращение центрального колеса 4.1 через вал 6.1 вызывает колебательное движение закрепленного на этом валу приводного рычага 7.1 относительно среднего положения, находящегося в плоскости опорных площадок 23.1 (фиг.1). Вращение остальных сателлитов и находящихся в зацеплении с ними центральных колес происходит аналогично с фазовым сдвигом, определяемым положением осей 5.1, 5.2, 5.3, 5.4 на водиле В и углом поворота ϕ центральных колес относительно друг друга. На фиг.4 показано положение начальных окружностей эксцентричных сателлитов 2.1, 2.2, 2.3, 2.4, соответствующее расположению четырех осей на водиле через 90°. Некруглые центральные колеса 1.1 и 1.2 повернуты на фазовый угол ϕ=45° относительно друг друга. В результате равномерное вращение водила преобразуется в колебательное движение приводных рычагов с фазовым сдвигом 45°. Синхронный перенос веса тела с опорной площадки на начинающую опускаться педаль (с пятки на носок) и с одной части рычага на другую вызывает импульсы крутящих моментов на водило. В режиме торможения воздействия на педали меняются на противоположные. Величина импульса крутящего момента зависит в основном от прилагаемой нагрузки на педаль, величины эксцентриситета е, КПД планетарного механизма, который меняется в широких пределах и очень низок (менее 0,01) для положений сателлитов, соответствующих очень большим значениям передаточных отношений (боковые положения сателлитов на фиг.3). Увеличение числа импульсов крутящих моментов за один оборот водила за счет установки нескольких последовательно работающих преобразующих механизмов позволяет повысить равномерность крутящего момента и КПД всего устройства. Жесткая кинематическая связь трансмиссии и приводных рычагов обеспечивает синхронную работу экипажа. При движении по инерции и для отдыха при движении вес тела переносится на опорные площадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗУЮЩИЙ ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2001 |
|
RU2193127C1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| Бурильная машина | 2002 |
|
RU2224076C1 |
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382916C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2380596C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382257C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2008 |
|
RU2402707C2 |

Изобретение относится к транспортному машиностроению, в частности к транспортным средствам, приводимым в движение мускульной силой человека. Устройство содержит раму с опорами для нескольких человек, заднее и переднее колеса, руль, ножной привод 24.1, 24.2, 24.3, 24.4 и трансмиссию, образованную планетарным зубчатым механизмом и зубчатыми передачами. Планетарный зубчатый механизм имеет два составных центральных колеса. Центральное колесо, составленное из колес 1.1 и 1.2, - некруглое. Составные зубчатые колеса 4.1-4.4 другого центрального колеса закреплены на полых коаксиальных валах 6.1-6.4, образующих составной ведущий вал. Водило В - ведомое и имеет зубчатые венцы 9, 10 для передачи крутящего момента заднему колесу. Сателлиты выполнены двухрядными. Сателлиты 2.1 и 2.3, сопряженные с некруглым центральным колесом, имеют круглую форму и эксцентрично смещены относительно своих осей 5.1, 5.3 на величину смещения некруглого центрального колеса и имеют с ним одинаковое число зубьев. Технический результат - создание компактного многоместного транспортного средства, позволяющего снижать энергозатраты на движение за счет использования веса тела всего экипажа с получением равномерного крутящего момента на приводном колесе. 2 з.п. ф-лы, 4 ил.
некруглым центральным колесом, имеют круглую форму и эксцентрично смещены относительно своих осей вращения на величину смещения некруглого центрального колеса.
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| КАРЕТОЧНЫЙ УЗЕЛ ПЕДАЛЬНОГО ПРИВОДА ВЕЛОСИПЕДА | 0 |
|
SU313731A1 |
| СПОСОБ ПРОИЗВОДСТВА ЗАВАРНЫХ ПРЯНИКОВ | 2012 |
|
RU2504989C1 |
| US 5288280 А, 22.02.1994. | |||
| Устройство для контроля работы асинхронного двигателя | 1976 |
|
SU657347A1 |

