Изобретение относится к планетарно-фрикционным передачам.
Известен “Планетарно-высокочастотный вибратор” (а.с. СССР № 168172, кл. МПК В 06 В 1/16, опублик. БИ № 3, 05.02.1965 г.) (1).
Вышеприведенная планетарная передача содержит внешний корпус трубчатой формы, ось привода, установленную на подшипниках в центральной части торцовой поверхности внешнего корпуса, внутренний корпус цилиндрической формы с беговой поверхностью, обращенной к внутренней поверхности внешнего корпуса, и установленный в нем на оси привода с возможностью обката по внутренней поверхности внешнего корпуса посредством механизма параллельных кривошипов.
Данная планетарно-фрикционная передача предназначена для получения вибрации, т.е. вибрационно неуравновешена и не может быть применена в ее изначальном виде в качестве редуктора.
Целью предлагаемого изобретения является создание волнового планетарно-фрикционного редуктора, обеспечивающего простоту и надежность конструкции, высокий КПД и т.д., а также возможность применения во многих областях техники.
Указанная цель достигается следующим образом.
Редуктор выполнен, по меньшей мере, из внешнего корпуса трубчатой формы. На внутренней его поверхности сделаны три радиальные проточки. Внешний корпус выполнен с торцовыми поверхностями, в центре которых с одной стороны вращается в подшипниках ось привода, а с другой стороны, тоже в центре, вращается в подшипниках силовая ось с фланцем.
Внутри внешнего корпуса вставлены последовательно один за другим, по меньшей мере, три внутренних корпуса цилиндрической формы, имеющие на своей наружной поверхности беговые поверхности, отвечающие по форме радиальным внутренним проточкам внешнего корпуса. Между поверхностями проточек внешнего корпуса и беговыми поверхностями внутренних корпусов должен быть зазор (люфт).
Вставленные внутренние корпуса ограничены в своем перемещении упорными подшипниками или антифрикционными поверхностями, или шайбами, дающими возможность перемещения корпусов в радиальном направлении на величину зазора (люфта). По геометрической оси каждого внутреннего корпуса, на подшипниках, запрессованных в боковые поверхности внутренних корпусов, вращаются оси. Имеются стыковочные торцевые шлицевые соединения осей для соединения оси привода с осью первого к ней внутреннего корпуса и для соединения осей внутренних корпусов между собой с возможностью радиального перемещения осей с корпусами относительно друг друга по шлицевым плоскостям устройств. Для передачи крутящего момента от одного внутреннего корпуса к другому на торцевых поверхностях внутренних корпусов, обращенных друг к другу, имеются по два силовых пальца, расположенных на одном торцевом диаметре симметрично друг другу. Также на фланце силовой оси редуктора, на его поверхности, обращенной к торцу внутреннего корпуса, имеются такие же два силовых пальца. Между внутренними корпусами находятся силовые кольца с четырьмя специальными отверстиями, расположенными симметрично друг другу попарно на двух взаимно перпендикулярных диаметрах каждого силового кольца. Ширина отверстий равна диаметру силовых пальцев, а длина (удлинение отверстий сделано по радиусу кольца) соответствует диаметру силового пальца плюс двойная величина радиального зазора (люфта) между внутренними корпусами и внешним корпусом. Каждое кольцо соединяет смежные внутренние корпуса через их силовые пальцы, вставленные в отверстия силовых колец. Во внутренних корпусах, каждый в своем корпусе, каждый на своей оси внутреннего корпуса, вращаются три дебаланса. Два крайних дебаланса развернуты относительно среднего дебаланса на 180°, при этом должны соблюдаться условия нахождения центров тяжести всех трех дебалансов в одной осевой плоскости внешнего корпуса и условие возможности радиального перемещения внутренних корпусов относительно друг друга по шлицевым плоскостям стыковочных устройств осей внутренних корпусов. Массы дебалансов и их расстояния от своих осей должны быть такими, чтобы центробежная сила, возникающая при вращении среднего дебаланса, была равна сумме двух одинаковых центробежных сил крайних дебалансов.
При вращении оси привода происходит вращение цепочки всех осей внутренних корпусов вместе с закрепленными на осях дебалансами и возникновение центробежных сил, прижимающих внутренние корпуса к внутренним радиальным проточкам внешнего корпуса редуктора, и их волновое обкатывание вслед за вращающимися дебалансами. В связи с тем, что внешний диаметр внутренних корпусов меньше диаметра радиальных проточек внешнего корпуса из-за радиального зазора (люфта), внутренние корпуса, обкатываясь, поворачиваются на большую угловую величину, чем обкатывающая их ось. Отношение добавочного углового вращения внутреннего корпуса (Δα°) к полному обороту оси и будет соответствовать редукции данного устройства (360°/Δα°). Передача крутящего момента от одного внутреннего корпуса к другому и далее на фланец силовой оси происходит через силовые пальцы и силовые кольца. Расположение крайних дебалансов развернутыми относительно среднего на 180° дает возможность уравнивания реакций центробежных сил дебалансов на внешний корпус.
В качестве аналога предлагаемого устройства можно принять “Планетарный высокочастотный вибратор” по источнику информации (1).
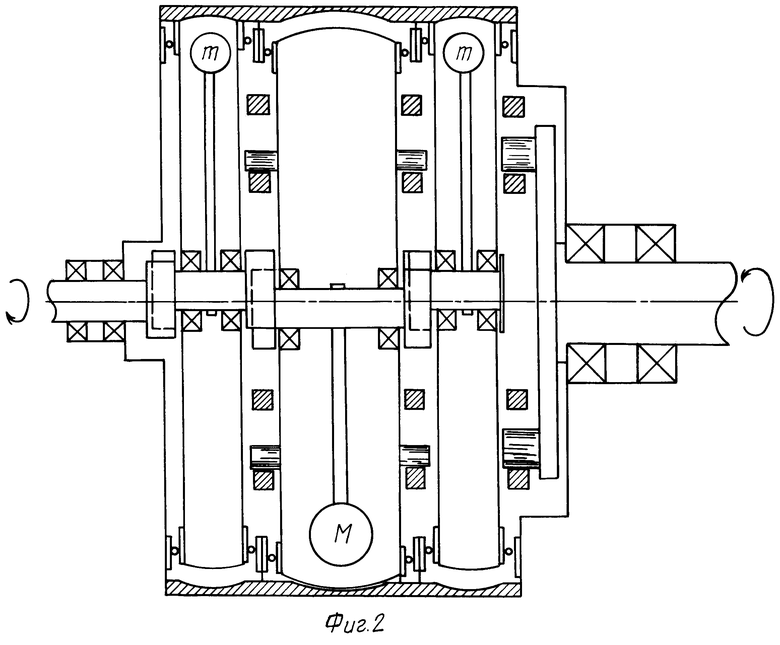
На фиг.1 изображен волновой планетарно-фрикционный редуктор. На фиг.2 - момент вращения осей и внутренних корпусов с дебалансами и самих внутренних корпусов, а также работа стыковочных торцевых шлицевых соединений осей силовых колец с силовыми пальцами. На фиг.3 - изображено силовое кольцо с отверстиями под силовые пальцы.
Предлагаемый волновой планетарно-фрикционный редуктор состоит из следующих узлов, агрегатов и деталей. Внешний корпус 1, например, на внутренней его поверхности имеет радиальные проточки 13. В центре торцовых поверхностей корпуса 1 с одной стороны имеется ось привода 6, вращающаяся в подшипниках 4, а с другой стороны - силовая ось 7 с фланцем 19, вращающаяся в подшипниках 14. Ось привода 6 и оси 5 внутренних корпусов малых 2 и большого внутреннего корпуса 3 соединены между собой последовательно стыковочными торцовыми шлицевыми соединениями 9. Оси 5 вращаются в запрессованных в торцы внутренних корпусов (большого 3 и малых 2) подшипниках 8. Внутренние корпуса (2 и 3) ограничены от осевого перемещения опорными подшипниками (или антифрикционными шайбами) 10 (фиг.1). На торцевых поверхностях внутренних малых корпусов 2 и большого 3, а также на внутреннем фланце 19 находятся силовые пальцы 15, соединяющие через силовые кольца 18 смежные внутренние корпуса (2 и 3), а также фланец 19 с обращенным к нему торцом корпуса 2. Во внутренних корпусах (2 и 3), каждый в своем корпусе, на свой оси закреплены дебалансы (большой 16 и малые 17). Внутренние корпуса (2 и 3) имеют на поверхности, обращенной к внешнему корпусу 1, беговые поверхности 12, а внешний корпус 1 имеет на своей внутренней поверхности радиальные проточки 13. Между радиальными проточками 13 внешнего корпуса 1 и беговыми поверхностями 12 внутренних корпусов (2 и 3) имеется радиальный зазор (люфт) 11.
Волновой планетарно-фрикционный редуктор работает следующим образом.
При вращении, например, оси привода 6, вращение передается через стыковочные торцевые шлицевые соединения 9 на все оси 5 с закрепленными на них дебалансами (малыми 17 и большим 16). При вращении дебалансов (17 и 16) возникают центробежные силы, передаваемые через оси 5, подшипники 8 на внутренние корпуса (малые 2 и большой 3), которые будут прижаты своими беговыми поверхностями 12 к радиальным проточкам 13 внешнего корпуса 1 и будут обкатываться по ним вслед за вращением дебалансов (17 и 16), при этом стыковочные торцевые шлицевые соединения 9 осей 5 дадут возможность прижатия внутренних корпусов (2 и 3) к внешнему корпусу 1, причем усилия прижатия от двух крайних дебалансов относительно усилия прижатия среднего дебаланса будут находиться в противофазе (фиг.2). Все консольные нагрузки на внутренние корпуса гасятся опорными подшипниками 10. Передача крутящего момента при этом внутренними корпусами (2 и 3) друг другу и к фланцу 19 силовой оси 7 будет производиться через силовые пальцы 15 и силовые кольца 18 (фиг.2 и 3) (показаны силовые пальцы и отверстия силовых колец только в плоскости чертежа). В таком положении с небольшим эксцентриситетом осей 5 относительно геометрической оси внешнего корпуса 1, возникшем из-за величины радиального зазора (люфта) 11, будут обкатываться внутренние корпуса (2 и 3) относительно внешнего корпуса 1, создавая на силовой оси редуктора результирующий крутящий момент в (360°/Δα°), больший нежели приложенный к оси привода 6.
Предлагаемая конструкция волнового планетарно-фрикционного редуктора достаточно проста и может быть использована в различных областях техники.
К положительным моментам предлагаемой системы редуктора можно отнести ее постепенную как бы настройку на определенное силовое действие, при достижении определенных оборотов (своеобразное сцепление) - довольно высокий КПД. Положительным моментом является и то, что редуктор собран из стандартных элементов (внутренние корпуса, силовые кольца, оси корпусов со шлицевыми разъемами). Простым увеличением количества этих стандартных элементов можно увеличивать и мощность редуктора. При конструировании редуктора можно заменить большой внутренний корпус с большим дебалансом двумя малыми корпусами с малыми дебалансами. Редуктор легко герметизируется, что отражается на его долговечности.
Конфигурация самих контактирующих поверхностей может быть самой разнообразной (овальной, волнистой, клиновидной и т.п.). Для лучшего фрикционного контакта возможно покрытие контактирующих поверхностей слоем фрикционного материала. Для возврата внутренних корпусов в исходное положение при отсутствии вращательного момента на ось привода возможна установка пружин на стыковочных торцевых шлицевых соединениях осей.
В конструкции редуктора необходимо выполнение условия одинакового удельного давления беговых поверхностей внутренних корпусов на внутренние радиальные проточки внешнего корпуса для получения одинаковых условий износа контактирующих поверхностей.
Литература
1. “Планетарный высокочастотный вибратор”. - А.с. СССР № 168172, кл. МПК В 06 В 1/16, опубл. БИ № 3, 05.02.1965 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ ДВИЖИТЕЛЬ ДЛЯ ТРУБОПРОВОДОВ | 2004 |
|
RU2270779C2 |
| ВИБРАЦИОННЫЙ ДВИЖИТЕЛЬ ДЛЯ ТРУБОПРОВОДОВ | 2001 |
|
RU2216499C2 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2008 |
|
RU2373338C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2006 |
|
RU2304666C1 |
| ОДНОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2216474C2 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2005 |
|
RU2294418C1 |
| ОДНОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2282552C1 |
| РОТОРНЫЙ НАСОС | 2004 |
|
RU2271475C2 |
| ВОЛНОВОЙ АНТИКАВИТАЦИОННЫЙ ГИДРОДВИЖИТЕЛЬ | 2002 |
|
RU2242398C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХСЕКЦИОННОГО СОЧЛЕНЕННОГО ВЕЗДЕХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2260535C2 |

Изобретение относится к машиностроению, в частности к волновым планетарно-фрикционным вариаторам. Планетарно-фрикционный вариатор содержит внешний корпус 1 трубчатой формы, внутренние корпуса 2, 3 цилиндрической формы с беговыми поверхностями 12, обращенными к внутренней поверхности внешнего корпуса для обката по ней, ось 6 привода, силовую ось 7 с фланцем 19, силовые пальцы 15, расположенные по два на торцевых поверхностях внутренних корпусов 2, 3 и на фланце 19, три дебаланса, размещенные на осях 5 во внутренних корпусах 2 и развернутые относительно друг друга последовательно один за другим на 180°, стыковочные шлицевые соединения 9 для соединения осей привода и внутренних корпусов между собой. Вращение оси 6 передается на все оси 5 с дебалансами 16 и 17, которые создают центробежные силы, передаваемые на внутренние корпуса 2 и 3. Упомянутые корпуса прижимаются беговыми поверхностями 12 к радиальным проточкам 13 внешнего корпуса и обкатываются по ним. Технический результат - повышение надежности и КПД конструкции. 3 ил.

Планетарно-фрикционный редуктор, содержащий внешний корпус трубчатой формы, ось привода, установленную на подшипниках в центральной части торцевой поверхности внешнего корпуса, установленный с возможностью обката по внутренней поверхности внешнего корпуса внутренний корпус цилиндрической формы с беговой поверхностью, обращенной к внутренней поверхности внешнего корпуса, отличающийся тем, что снабжен силовой осью с фланцем, дополнительно двумя внутренними корпусами цилиндрической формы с беговыми поверхностями, обращенными к внутренней поверхности внешнего корпуса с возможностью обката по ней, причем на внутренней поверхности внешнего корпуса выполнены три радиальные проточки, беговые поверхности внутренних корпусов по конфигурации соответствуют упомянутым радиальным проточкам, а внутренние корпуса установлены в упомянутых радиальных проточках с радиальным зазором, а также снабжен силовыми пальцами, расположенными по два на торцевых поверхностях внутренних корпусов, обращенных друг к другу и к фланцу силовой оси, имеющему на своей поверхности, обращенной к торцу внутреннего корпуса, также два пальца, осями, проходящими в каждом внутреннем корпусе по его геометрической оси и вращающимися на подшипниках, запрессованных в торцы внутренних корпусов, размещенными во внутренних корпусах тремя дебалансами, закрепленными каждый на своей оси и развернутыми друг относительно друга последовательно один за другим на 180°, при этом сумма одинаковых центробежных сил двух крайних дебалансов равна центробежной силе среднего дебаланса, стыковочными шлицевыми соединениями осей для соединения оси привода с осью первого к ней внутреннего корпуса и для соединения осей внутренних корпусов между собой с возможностью радиального перемещения каждой оси со своим корпусом друг относительно друга по шлицевым плоскостям стыковочных соединений, упорными подшипниками для ограничения осевого перемещения внутренних корпусов и возможности их радиального перемещения относительно друг друга и размещенными между внутренними корпусами и между фланцем силовой оси и внутренним корпусом силовыми кольцами с четырьмя расположенными попарно на двух взаимно перпендикулярных диаметрах симметрично друг другу отверстиями для установки в них силовых пальцев, при этом ширина каждого отверстия равна диаметру силового пальца, а длина отверстия, расположенная по радиусу силового кольца, равна диаметру силового пальца плюс двойной размер радиального зазора между внешним и внутренним корпусами.
| 0 |
|
SU168172A1 |

