Изобретение относится к транспортным средствам, в частности к системе управления и улучшения ходовых качеств двухсекционного сочлененного вездеходного транспортного средства.
Известна «Система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия» по описанию заявленного изобретения №2197403, класс МПК В 62 D 9/04, опубликовано в БИ №3, 27.01.2003.
Данная система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия предназначены для улучшения управления транспортного средства.
Система управления содержит сферические колеса, наклоняющиеся в поперечной плоскости транспортного средства на горизонтальных шарнирах, оси которых расположены в продольной плоскости транспортного средства и со смещением относительно центра сферы колеса к наружной стороне колеса. Наклоны левого и правого колеса каждого из двух мостов осуществляются трапециями автомобильного типа, расположенными вертикально в поперечной плоскости транспортного средства. Трансмиссия двухсекционного сочлененного вездеходного транспортного средства выполнена гибкими валами с подводом ими крутящего момента к сферическим колесам через встроенные в них понижающие редукторы.
Недостатком данной системы управления и трансмиссии являются достаточно большие усилия, возникающие на руле при подготовке поворота транспортного средства на месте без поступательного движения, повышенная шумность протяженных быстровращающихся гибких валов, при передаче ими вращения к редукторам колес и их малый КПД.
Целью предлагаемого изобретения является создание системы управления двухсекционного сочлененного вездеходного транспортного средства, свободной от вышеперечисленных недостатков, что повлечет за собой улучшение управления вездеходом.
Указанная цель достигается следующим образом. К каждому сферическому колесу крутящий момент подводится через коническую передачу, имеющую три конические шестерни: ведущую, промежуточную и ведомую. Ведущая коническая шестерня вращается от двигателя через жесткие силовые валы и передает вращение на ведомую через свободно вращающуюся на оси горизонтального шарнира наклона сферического колеса промежуточную коническую шестерню. Ведомая коническая шестерня вращает ось колеса и само сферическое колесо. Отношения конических шестерен на всех конических передачах сферических колес - одинаковы.
При наклоне колеса вокруг горизонтального шарнира ведомая шестерня имеет возможность обкатывать промежуточную коническую шестерню и получать добавочное угловое вращение со знаком «+» или «-» в зависимости от направления наклона колеса (вверх или вниз), что влечет за собой добавочное вращение колеса в направлении движения или против него. Промежуточные шестерни расположены на осях горизонтальных шарниров наклонов сферических колес вездехода так, чтобы вызванные при наклонах сферических колес их добавочные вращения были согласованы с общим поворотом вездехода, вызванного переходом сферических колес мостов на разные диаметры качения.
Особенно заметно облегчение, улучшения управления и маневренности вездехода при наклоне колес на месте без его поступательного движения, при подготовке поворота. Происходит подкатывание сферических колес с одной стороны вездехода друг к другу (внутренние колеса поворота) и раскатывание их с другой стороны (внешние колеса поворота).
При этом центральный шарнир рамы вездехода получает добавочный импульс для его излома в нужную сторону для выполнения поворота.
Диаметры конических шестерен подбирают в зависимости от желания получения дополнительного эффекта поворота и желаемых усилий при управлении вездеходом. При передаче вращения к ведущим коническим шестерням угловых передач сферических колес предусматриваются жесткие силовые валы с карданными и шлицевыми сочленениями в необходимых местах.
Горизонтальные тяги рулевых трапеций мостов двухсекционного сочлененного вездеходного транспортного средства имеют возможность изменения своей длины с ее фиксацией, а также закрепления своих концов на рычагах наклона сферических колес в различных точках симметричных относительно продольной оси вездехода, дающих возможность получения разнообразных пропорций верхнего и нижнего оснований трапеций управления. Это дает различные варианты пробуксовки сферических колес каждого моста относительно друг друга при их перекатывании в поперечном направлении при выполнении поворота и разнообразие взаимного расположения наклонов друг относительно друга сферических колес в каждом мосте, вплоть до перевода обоих колес каждого моста на малые диаметры качения (при сохранении достаточной управляемости вездехода) при использовании их (колес) в водоизмещающем режиме как поплавки при пересечении сильно заболоченных участков местности, рек и водоемов. При перестановке поперечной тяги трапеции или изменении ее длины должно быть учтено соответствие изменения движения передней и задней части вездехода относительно друг друга с изменением угла поворота на центральном шарнире путем изменения размеров рычагов передающих управляющие усилия между передней и задней частями вездехода при выполнении поворота. В поверхностях качения колес вездехода могут быть использованы поверхности вращения кривых (вокруг их осей симметрии), полученных при сечении конуса плоскостями или их комбинаций.
В качестве аналога предлагаемому изобретению взята «Система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия» по источнику информации [1].
Перечень фигур на чертежах
На фиг.1 изображен мост системы управления двухсекционного сочлененного вездеходного транспортного средства.
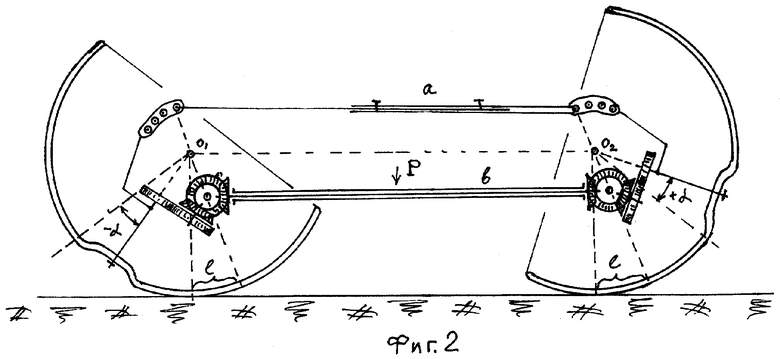
На фиг.2 изображен мост системы управления двухсекционного сочлененного вездеходного транспортного средства при выполнении поворота. Показаны наклоны сферических колес и работа угловых трехшестеренчатых систем каждого сферического колеса. Показаны равные угловые перекатывания колес («+α» и «-α») и соответственно равное их линейное перекатывание « » при равных размерах верхнего и нижнего оснований рулевых трапеций («а»=«в»).
» при равных размерах верхнего и нижнего оснований рулевых трапеций («а»=«в»).
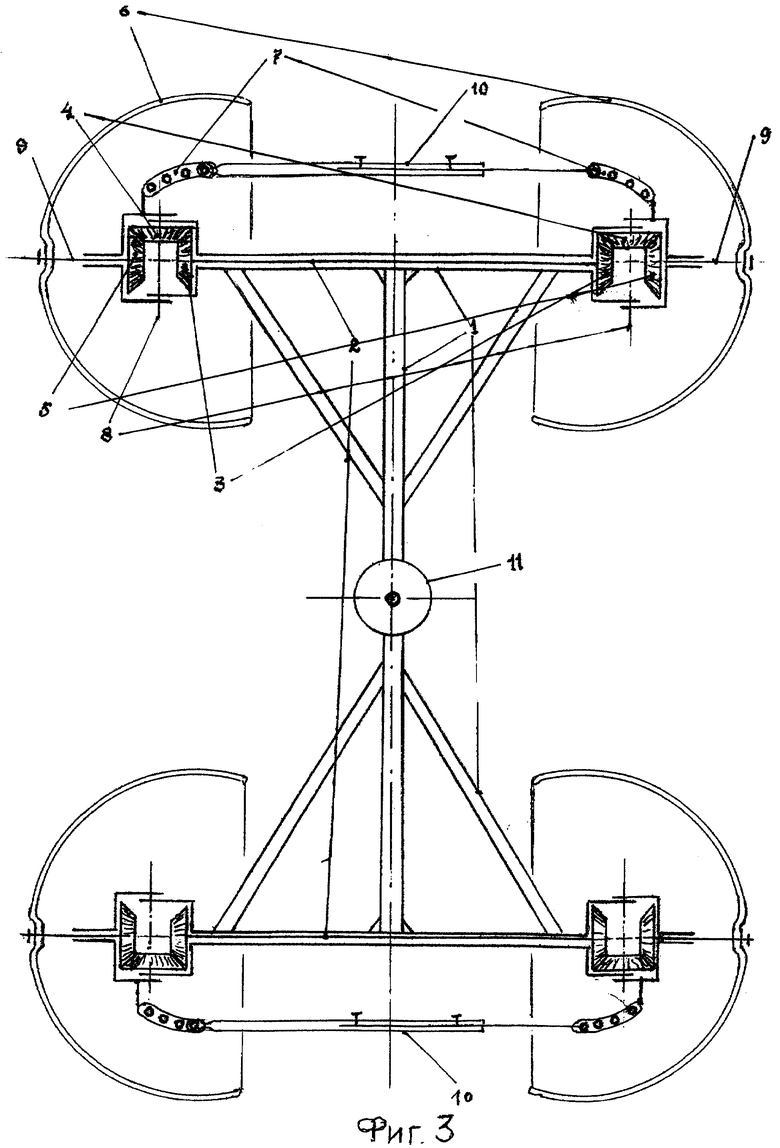
На фиг.3 изображена общая компоновка системы управления двухсекционного сочлененного вездеходного транспортного средства (горизонтальные тяги рулевых трапеций и рычаги наклона сферических колес для наглядности показаны в плоскости чертежа).
Предлагаемая система управления двухсекционного сочлененного вездеходного транспортного средства состоит из следующих узлов, агрегатов и деталей.
На раме 1 транспортного средства (фиг.3) расположены сферические колеса 6, имеющие возможность при перемещении регулируемой рулевой тяги трапеции 10 (фиг.1), через рычаги наклона 7 сферических колес выполнять угловые перемещения вокруг осей горизонтальных шарниров 8 в поперечной плоскости транспортного средства (фиг.2). На раме 1 (фиг.3, имеющей центральный шарнир 11, вращаются от двигателя жесткие силовые валы 2 (двигатель не показан), имеющие одинаковые угловые скорости вращения, на которых закреплены ведущие конические шестерни 3 (фиг.1; 3). Вращение от ведущих конических шестерен 3 передается через промежуточные конические шестерни 4, вращающиеся на осях горизонтальных шарниров 8, на ведомые конические шестерни 5, ось сферического колеса 9 и само сферическое колесо 6 (фиг.3).
Система управления двухсекционного сочлененного вездеходного транспортного средства работает следующим образом.
При вращении, например, жестких силовых валов 2 (фиг.3) вращение через ведущую коническую шестерню 3 передается промежуточной конической шестерне 4 и далее на ведомую коническую шестерню 5, которая, в свою очередь, вращает ось сферического колеса 9 со сферическим колесом 6.
При перемещении регулируемой рулевой тяги 10 (фиг.2) происходит (через рычаги наклона 7) изменение углов наклона обоих сферических колес 6 каждого моста. При этом происходит обкатывание ведомой конической шестерней 5-промежуточной шестерни 4. Получаемое при этом добавочное вращение ведомой шестерни 5 со знаком «+» или «-» в зависимости от направления наклона сферического колеса 6 (вверх или вниз) влечет за собой добавочное вращение каждого сферического колеса 6 в направлении движения транспортного средства или против него. Промежуточные угловые шестерни 4 расположены на осях горизонтальных шарниров 8 наклонов сферических колес 6 вездехода (фиг.3) так, что вызванные при наклонах сферических колес 6 их добавочные вращения были согласованы с направленностью общего поворота вездехода, вызванного переходом сферических колес 6 каждого моста на разные диаметры качения. При этом происходит подкатывание сферических колес 6 с одной стороны вездехода друг к другу (внутренние колеса поворота) и раскатывание их с другой стороны (внешние колеса поворота). При этом центральный шарнир 11 рамы 1 (фиг.3) получает добавочный импульс для излома рамы 1 в нужную сторону для выполнения поворота. В повороте угол на центральном шарнире 11 (в горизонтальной плоскости) рамы 1, кроме того, выполняется и фиксируется тягами, входящими в систему передачи управляющих усилий на вездеходе (на чертежах они не показаны).
Раздвижная с фиксируемой длиной горизонтальная тяга 10 трапеции с фиксацией ее концов шарнирно в разных симметрично расположенных относительно продольной оси вездехода точках рычагов наклона 7 сферических колес 6 дает возможность получения разнообразных пропорций верхнего «а» и нижнего «в» оснований трапеции управления для получения различных вариантов пробуксовки сферических колес 6 при их перекатывании в поперечной плоскости (вездехода) в повороте.
На фиг.1 показан вариант равных оснований трапеции управления («а»=«в»). При этом получен вариант минимальной пробуксовки колес в повороте и максимальное приближение к идеальной геометрии поворота.
Предлагаемая конструкция системы управления двухсекционного сочлененного вездеходного транспортного средства улучшает характеристики его управляемости и маневренности, уменьшает физические нагрузки на водителя и износ протектора колес.
Литература
1. «Система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия» по описанию изобретения №2197403, класс МПК В 62 D 9/04, опубликовано в БИ №3, 27.01.2003.
Изобретение относится к транспортным средствам, в частности к системе управления и улучшения ходовых качеств двухсекционного сочлененного вездеходного транспортного средства. На каждое сферическое колесо вездехода крутящий момент передается через систему из трех конических шестерен последовательного зацепления. Ведущая коническая шестерня, вращаемая силовым валом, передает вращение на ведомую коническую шестерню через промежуточную коническую шестерню, вращающуюся на оси горизонтального шарнира наклона сферического колеса. Ведомая коническая шестерня вращается совместно с осью сферического колеса и самим колесом. При этом угловые скорости вращения ведущих угловых шестерен - одинаковы, а отношения (т.е. редукция) конических передач одинаковы для всех 4-х колес. При совместном наклоне сферических колес каждого моста происходит обкатывание ведомой конической шестерней каждого сферического колеса своей промежуточной конической шестерни, что приводит к добавочному угловому вращению ведомой шестерни каждого сферического колеса и, следовательно, самого колеса. Промежуточные угловые шестерни на осях горизонтальных шарниров наклона сферических колес расположены так, что добавочные вращения колес при их наклоне согласуются с общим поворотом транспортного средства. С внутренней стороны поворота вездехода они подкатываются друг к другу, а с внешней стороны поворота вездехода они раскатываются, придавая центральному шарниру сочленения рамы вездехода дополнительный импульс на излом в нужную сторону. При этом улучшается геометрия поворота, что существенно облегчает управление вездеходом, повышает его маневренность и уменьшает износ протектора колес. Кроме того, горизонтальные тяги рулевых трапеций мостов вездехода имеют возможность изменения своей длины с ее фиксацией, а также закреплением своих концов на рычагах наклона сферических колес, в различных симметричных относительно продольной оси вездехода точках, дающее возможность получения разнообразных пропорций верхнего и нижнего оснований трапеций управления относительно друг друга. При этом можно развернуть поверхности колес на обеих сторонах вездехода, переводя их на малые диаметры качения так, то они превращаются в водоизмещающие поплавки при сохранении достаточной управляемости вездехода на суше и воде. Технический результат заключается в улучшении управления вездеходом. 1 з.п. ф-лы, 3 ил.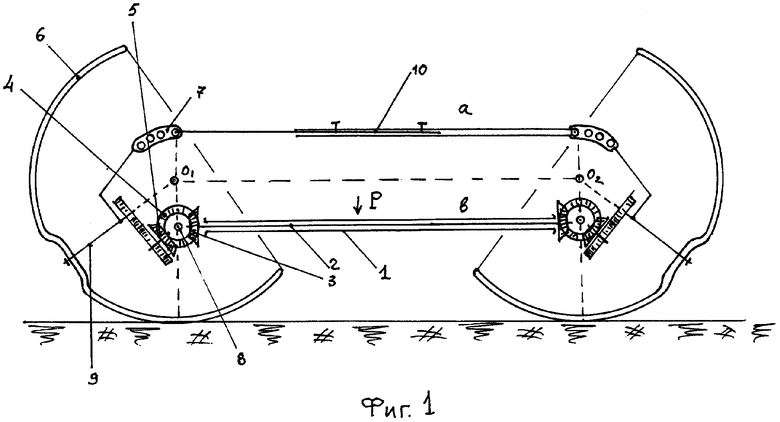
| СИСТЕМА УПРАВЛЕНИЯ ДВУХСЕКЦИОННОГО СОЧЛЕНЕННОГО ВЕЗДЕХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО ТРАНСМИССИЯ | 2001 |
|
RU2197403C2 |
| УСТРОЙСТВО НАКЛОНА УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПОВОРОТЕ | 1999 |
|
RU2176204C2 |
| СОЧЛЕНЕННОЕ ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ИЗМЕНЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ | 1990 |
|
RU2019463C1 |
| JP 6068526 U, 06.06.1981. | |||

