Изобретение относится к стоматологии, может быть использовано для диагностики опорно-удерживающего аппарата зуба или тканей, окружающих имплантат.
Известен способ определения подвижности зуба путем приложения к зубу переменной силы, обеспечивающей возвратно-поступательные колебания зуба, и измерения амплитуды смещения зуба (Авторское свидетельство СССР №1212421, А 61 С 19/045, опубл. 1986 г.).
Этот способ предназначен для измерения только общих вязкоупругих характеристик тканей опорно-удерживающего аппарата зуба, определяемых по величине подвижности зуба. Способ обладает низкой точностью и не позволяет улучшить качество диагностики, т.к. общая величина подвижности зуба не всегда реально отражает патологические изменения, происходящие в опорноудерживающем аппарате зуба при различных заболеваниях.
Наиболее близким является способ измерения подвижности зуба, включающий приложение к зубу переменной силы, постоянной амплитуды и частоты, обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измерение амплитуды смещения зуба (Патент Российской Федерации №2065724, А 61 В 5/05, А 61 С 19/04, опубл. 1996 г.).
Кроме того, в этом способе измерение амплитуды смещения зуба производят с выделением двух ее составляющих, соответственно синфазной переменной силе и сдвинутой по фазе относительно нее на 90 градусов, по величине которых судят об упругой и вязкой характеристиках подвижности зуба. Эти составляющие являются носителями ценной информации о состоянии пародонта. Метод измерения был реализован в портативном двухпараметрическом периодонтометре, используемом в клинической практике.
Преимуществами этого способа являются: получение дополнительной информации об изменениях опорно-удерживающего аппарата зуба, улучшение диагностирования заболевания.
Ограничением этого способа является трудоемкость диагностирования состояния опорно-удерживающего аппарата зубов нижней челюсти, что связано с собственной ее подвижностью, которая отличается для каждого индивидуума. При практической реализации для нижней челюсти данного способа ранее приходилось измерять подвижность зуба в физиологической норме для конкретного пациента, что не всегда было возможно из-за отсутствия одноименных зубов в норме у него, или фиксировать положение нижней челюсти специальными приспособлениями, а затем сравнивать подвижность зуба со среднестатистическим показателем одноименного зуба в норме, что в целом снижало точность диагностирования. Как будет показано далее, введение фиксирующих приспособлений не позволяет значительно улучшить качество диагностики. При измерении составляющих амплитуды, синфазной переменной силе и сдвинутой по фазе относительно нее на 90 градусов, качество диагностирования дополнительно ухудшалось из-за погрешности, вносимой в измерения собственной подвижностью челюсти.
Решаемая изобретением задача - расширение функциональных возможностей и арсенала средств для диагностики характера нарушений опорно-удерживающего аппарата зуба нижней челюсти, повышение достоверности результатов и осуществление экспресс-оценки состояния опорно-удерживающего аппарата тканей зуба нижней челюсти.
Технический результат, который может быть получен при осуществлении способа, - повышение точности и качества диагностирования заболевания, уменьшение погрешности измерения.
Для решения поставленной задачи с достижением указанного технического результата в известном способе измерения подвижности зуба, включающем приложение к зубу переменной силы F1 постоянной амплитуды А и частоты ω, обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измерение амплитуды Х смещения зуба, согласно изобретению для зубов нижней челюсти после приложения к зубу упомянутой переменной силы F1 производят приложение к нему второй переменной силы F2 с той же величиной постоянной амплитуды А, что и для упомянутой переменной силы F1, но с другой частотой  , равной 1,5-2,5 ω частоты упомянутой переменной силы F1, также обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измеряют амплитуду Х смещения зуба при второй переменной силе F2, определяют параметр R в соответствии с математическим выражением
, равной 1,5-2,5 ω частоты упомянутой переменной силы F1, также обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измеряют амплитуду Х смещения зуба при второй переменной силе F2, определяют параметр R в соответствии с математическим выражением  и по параметру R судят о состоянии опорно-удерживающего аппарата зуба для нижней челюсти.
и по параметру R судят о состоянии опорно-удерживающего аппарата зуба для нижней челюсти.
Возможен дополнительный вариант осуществления способа, в котором целесообразно, чтобы измерение амплитуды смещения зуба при упомянутой переменной силе и при второй переменной силе производили с выделением двух составляющих, соответственно синфазной переменным силам и сдвинутой по фазе относительно них на 90 градусов, по величине которых судят об упругой и вязкой характеристиках подвижности зуба.
Указанные преимущества, а также особенности настоящего изобретения поясняются лучшим вариантом его осуществления со ссылками на прилагаемые чертежи.
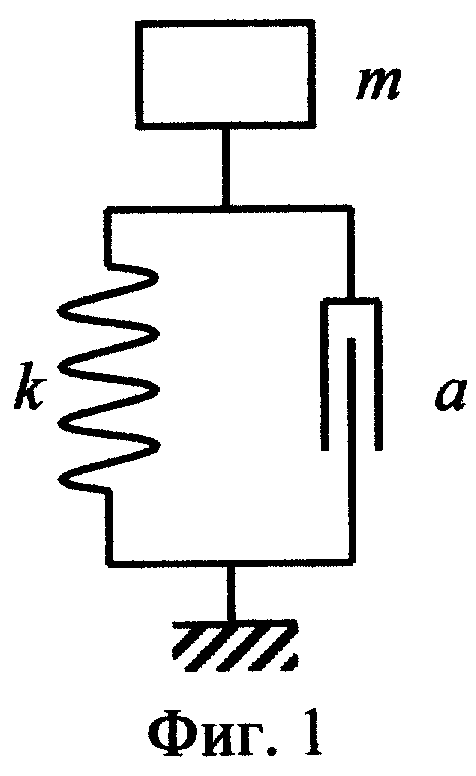
Фиг.1 изображает динамическую модель опорно-удерживающего аппарата зуба, для зубов верхней челюсти;
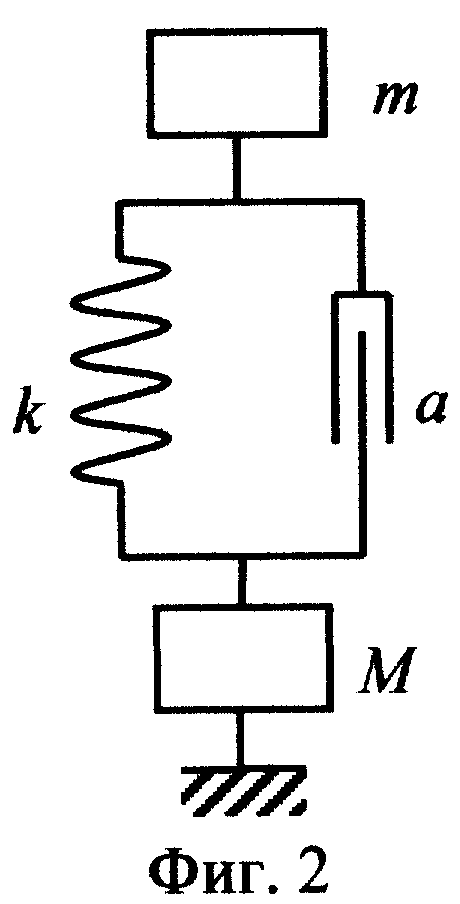
Фиг.2 - то же, для зубов нижней челюсти.
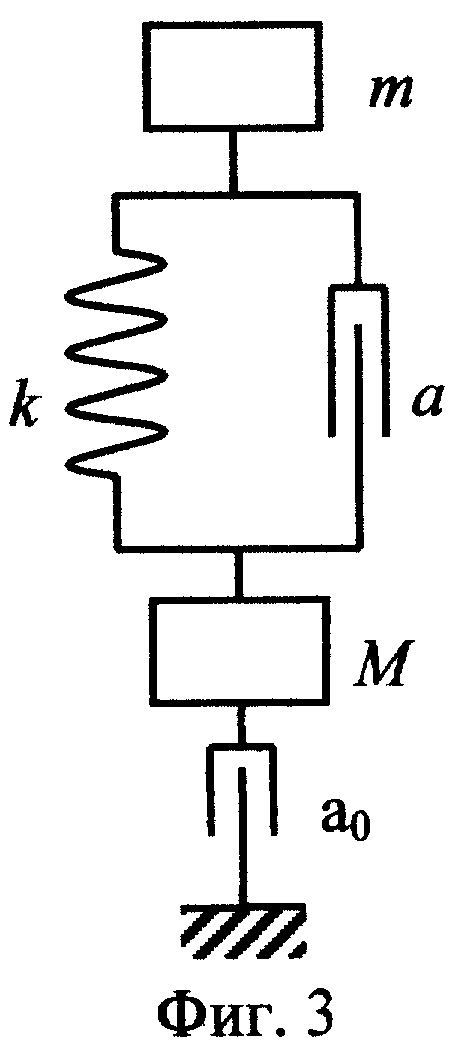
Фиг.3 - то же, уточненная модель.
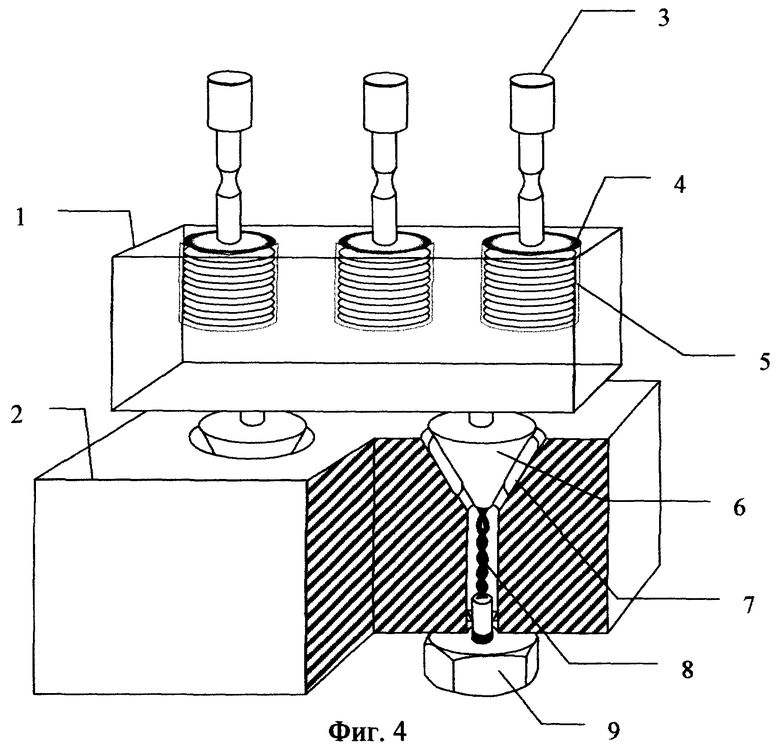
Фиг.4 - физическая модель нижней челюсти, схематично.
В результате клинических исследований подвижности зубов со здоровым пародонтом было обнаружено, что подвижности одноименных зубов верхней и нижней челюстей заметно отличаются. Этот эффект объясняется ошибкой, вызванной тем, что нижняя челюсть, из-за небольшой массы ее тканей, не является совершенно неподвижной, а движется вместе с зубом. Экспериментальным подтверждением этому явилось уменьшение этой ошибки при увеличении частоты переменной (периодической) силы F.
С другой стороны, как показывают эксперименты, верхнюю челюсть можно считать практически неподвижной в том смысле, что перемещение верхней челюсти значительно меньше, чем собственное (резонансное) смещение зуба на частотах действующей переменной силы более 80 Гц.
Погрешность измерения подвижности зубов зависит от частоты немонотонно. С одной стороны, погрешность измерения подвижности зубов нижней челюсти уменьшается при увеличении частоты. А с другой стороны, начиная с некоторой частоты, на проводимые измерения начинает влиять масса зуба и по мере приближения к резонансной частоте системы зуб - периодонт - кость это влияние становится преобладающим. Это ограничение не позволяет уменьшить ошибку до приемлемой величины только за счет увеличения частоты переменной силы F. Систематизация экспериментальных данных не обнаружила заметной ошибки в упругой составляющей, зато остаточная ошибка вязкой составляющей подвижности была сравнима с величиной подвижности зуба со здоровым пародонтом. При этом разброс этой ошибки на различных зубах оказался небольшим, что позволило ввести коррекцию результатов измерения подвижности зубов нижней челюсти путем простого вычитания средней ошибки.
Несмотря на то, что коррекция результатов позволяла получать более надежные клинические результаты, разброс полученных данных оставался велик. Поэтому возникла необходимость дальнейшего увеличения точности и, главное, расширения диапазона достоверно измеряемой подвижности зубов нижней челюсти.
Для понимания факторов, влияющих на погрешность измерения подвижности зуба и оценки величины этой погрешности необходимо создание реалистичных динамических моделей зуба. Начальная часть исследования состояла в выборе динамической модели механической системы зуб - периодонт - ткани нижней челюсти на основе экспериментальных данных. Была создана компьютерная программа для численного моделирования, позволяющая моделировать колебания механических систем, изменять параметры этих систем, включая число элементов этих систем, параметры воздействующей переменной силы и отображать результаты моделирования в наглядной форме.
Усложнение модели приводит к росту количества неизвестных параметров, непосредственное измерение которых in vivo выглядит практически невыполнимой задачей. В результате сравнения результатов клинических экспериментов и численного моделирования было установлено, что динамические характеристики зубов верхней челюсти для частот свыше 80 Гц удовлетворительно описывает простейшая динамическая упруговязкая модель с одной массой m, упругим элементом с жесткостью k и вязким элементом с вязкостью а (фиг.1). В этом случае альвеолярную кость верхней челюсти можно считать неподвижной. Тем же путем было определено, что в динамическую модель зубов нижней челюсти необходимо вводить дополнительные элементы.
Введение в модель вместо жесткой опоры дополнительной массы М (фиг.2), близкой по массе к массе нижней челюсти (масса костной ткани и окружающих мягких тканей), позволяет воспроизвести в динамической модели амплитудно-фазовые эмпирические соотношения. Введение в модель различных дополнительных элементов, в принципе, должно служить дальнейшему уточнению модели и повышению точности совпадения результатов моделирования и клинических исследований. Но, как показали экспериментальные исследования, получить при этом заметного эффекта не удается, так как модель (фиг.2) воспроизводит эксперимент с точностью, сравнимой с точностью самого этого эксперимента. Однако введение дополнительно вязкого элемента a0 (фиг.3), представляющего вязкость окружающих нижнюю челюсть мягких тканей, несколько уточняет динамическую модель (на величину нескольких процентов совпадения данных). Величина вязкой силы со стороны элемента a0 (фиг.3) слишком мала и для практических расчетов достаточно хорошим приближением является модель (фиг.2).
При измерении подвижности зуба заявленным методом можно, например, измерять не только амплитуду смещения зуба под воздействием синусоидальной силы, но и относительную фазу между смещением зуба х и воздействующей на него силой F. Дифференциальное уравнение, описывающее модель (фиг.1)

где А - комплексная амплитуда силы F=Аеiωt, ω=2πf - круговая частота, х=хеiωt - смещение зуба, m - масса зуба, а - декремент затухания вязкого элемента и k - жесткость системы зуб - периодонт - кость.
Это позволяет выразить неизвестные а и k через известные параметры, полученные в результате измерения. Эти выражения записываются в комплексной форме

Ошибку ω2m, зависящую от массы зуба, в решении уравнения (2) можно сделать малой, уменьшая частоту ω. Однако существуют ограничения на такое уменьшение - возрастание ошибки измерения смещения х при уменьшении частоты из-за влияния нижней челюсти.
Подвижность нижней челюсти не только вносит погрешность при измерении подвижности зубов, но и не позволяет скомпенсировать погрешность, вызванную разбросом масс зубов.
Переход к модели (фиг.2) для нижней челюсти приводит к следующей системе дифференциальных уравнений:
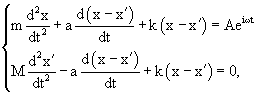
где х’=х’eiωt - смещение массы М (массы нижней челюсти). После исключения временной зависимости

Для модели (фиг.3) система уравнений выглядит

Амплитуды колебаний зуба Х и челюсти X’ - комплексные величины, то есть каждая состоит из двух параметров. Число уравнений для усложненных моделей удвоилось, но при этом число неизвестных действительных параметров в системах (3) и (4) превышает число уравнений соответственно на два и на три, что делает невозможным получение единственного решения этих уравнений. Одновременное измерение X’ (недостающих двух действительных параметров) при измерении Х могло бы, в принципе, привести систему (3) к системе, имеющей единственное решение. Однако из приведенных уравнений неясно, можно ли это дополнительное измерение практически реализовать.
На первый взгляд после моделирования процессов механической системы зуб -периодонт - ткани нижней челюсти ситуация выглядит тупиковой и отсутствуют пути решения проблемы определения подвижности зубов для нижней челюсти.
Однако, если провести дополнительное измерение на частоте  , отличающейся от частоты ω, система (3) дополнится аналогичными уравнениями и число уравнений в системе удвоится
, отличающейся от частоты ω, система (3) дополнится аналогичными уравнениями и число уравнений в системе удвоится
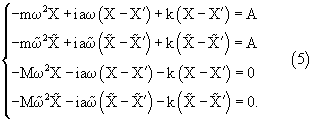
В этой системе уравнений А, Х,  , ω и
, ω и  - известные параметры, а m, М, X’,
- известные параметры, а m, М, X’,  ’, а и k - неизвестные. Система (5) формально имеет единственное решение. В отличие от уравнения (1) она является нелинейной, так как содержит мультипликативные члены, т.е. произведения неизвестных. Математическое выражение (5) выглядит системой уравнений, не имеющей решения в квадратурах. Однако использование симметрии системы приводит к ее относительно простым приближенным решениям.
’, а и k - неизвестные. Система (5) формально имеет единственное решение. В отличие от уравнения (1) она является нелинейной, так как содержит мультипликативные члены, т.е. произведения неизвестных. Математическое выражение (5) выглядит системой уравнений, не имеющей решения в квадратурах. Однако использование симметрии системы приводит к ее относительно простым приближенным решениям.
Модель (фиг.3) также можно привести к системе, имеющей единственное решение. Оценка показывает, что точность измерения подвижности зубов с помощью соответствующего алгоритма возрастает незначительно, но при этом заметно усложняется процесс измерения и многократно возрастает сложность решения нелинейной системы высокого порядка.
Умножая каждое из уравнений таким образом, чтобы первые слагаемые уравнений оказались попарно равными, получим
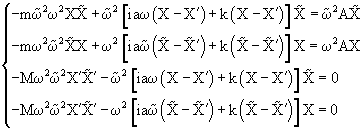
попарно вычитая уравнения, исключаем m и М
Разность этих уравнений

после преобразования приводятся к виду, пригодному для решения

После разделения на мнимую и действительную части получим выражения для интересующих нас параметров

Математические выражения (6) не являются полноценным решением, так как их правая часть содержит неизвестные X' и  Если учесть, что смещения нижней челюсти X' и
Если учесть, что смещения нижней челюсти X' и  по абсолютной величине значительно меньше смещений зуба Х и
по абсолютной величине значительно меньше смещений зуба Х и  , можно получить приближенное решение
, можно получить приближенное решение

Алгоритм, описываемый формулой (7), проще проанализировать после несложного преобразования

Сила, воздействующая на челюсть, практически равна силе, действующей на зуб. Смещение массы (в нашем случае челюсти) под воздействием этой силы обратно пропорционально квадрату частоты. Тогда “вклад” массы челюсти в величины ω2X и  одинаков и разность в скобках (7') будет существенно меньше зависеть от этой массы. Множитель
одинаков и разность в скобках (7') будет существенно меньше зависеть от этой массы. Множитель  необходим для нормировки полученного результата.
необходим для нормировки полученного результата.
Если частоты слишком близки друг к другу, то существует опасность резкого увеличения ошибки, так как разность в выражениях (7) становится сравнима с погрешностью измерения величин, входящих в это выражение. Поэтому необходимо сделать разность частот достаточно большой, иначе результат от применения алгоритма может быть отрицательным. С другой стороны, при увеличении частоты воздействующей силы смещение челюсти будет уменьшаться и компенсирующий эффект от применения алгоритма (7) соответственно уменьшится. Как показали исследования, наилучший результат от применения алгоритма (7) и осуществления способа достигается, если частота  находится в пределах 150-250% ω.
находится в пределах 150-250% ω.
Для реализации способа была создана измерительная система портативного персонального компьютера (ноутбука). В систему входят: измерительный щуп, ноутбук, PCMCIA плата АЦП (аналого-цифрового преобразователя) и специально разработанный электронный блок, включающий перестраиваемый фильтр гармоник генератора и инструментальный усилитель.
Работа системы происходит следующим образом.
Программная часть системы запускается после контакта измерительного щупа с исследуемым зубом. Программа инициализирует таймер платы АЦП, который выдает бинарный сигнал строго заданной частоты. Перестраиваемый фильтр гармоник генератора задерживает все гармоники этого сигнала, преобразуя его таким образом в синусоидальный сигнал. Этот сигнал подается в измерительный щуп, преобразующий электрический сигнал в силу F1, воздействующую на зуб. Перемещения (вибрация) зуба воспринимаются пьезоэлектрическим акселерометром и после усиления инструментальным усилителем возвращаются на плату АЦП. 12-разрядное АЦП одновременно преобразует сигналы генератора и акселерометра в цифровую форму и накапливает их в оперативной памяти. Далее из этих данных с помощью цифровой фильтрации выделяются две компоненты сигналов генератора А и усилителя Х. Весь этот цикл повторяется на второй частоте F2. И, таким образом, мы получаем полный набор данных для применения алгоритма (7).
Окончательные значения двух компонент подвижности упругой и вязкой составляющих р и q вычисляются по значениям двух компонент жесткости
где  - угол потерь.
- угол потерь.
Заметим, что угол потерь ϕ пропорционален площади периодонта, что придает этому параметру самостоятельное значение для диагностики заболеваний, что было известно из ближайшего аналога.
В системе измерения подвижности зубов имеется возможность автоматического сохранения полученных данных. Также предусмотрена дополнительная возможность сравнительного анализа состояния пародонта и ввода комментариев по каждому больному.
Понятно, что заявленный способ применим и для систем, обеспечивающих измерение и общей подвижности зубов без выделения составляющих, соответственно синфазной переменным силам и сдвинутой по фазе относительно них на 90 градусов, т.к. основной вклад в ошибку измерений для нижней челюсти вносит ошибка измерения вязкой составляющей. При этом она вносит самый значительный вклад в ошибку проведенных экспериментальных данных для измерения подвижности и без выделения составляющих.
Для экспериментального исследования алгоритма была специально сконструирована физическая модель нижней челюсти с плавающей опорой (фиг.4).
Физическая модель состоит из основных двух узлов - верхнего (подвижного) опорного узла 1 и нижнего (неподвижного) узла 2. На верхнем узле 1 расположен набор элементов, моделирующих зубы с различными вязко-упругими характеристиками. Модели зубов представляют собой стальные стержни 3, в нижней части которых расположен пакет тонких дисковых пружин 4. Пакет дисковых пружин 4 погружен в отверстия 5, заполненные высоковязкой кремнийорганической жидкостью. Экспериментально было установлено, что такая конструкция наиболее близка по механическим свойствам к реальному зубу. Несколько конусов 6, жестко присоединенных к верхнему узлу 1 физической модели, входят в конические отверстия нижнего узла 2. Между ними находится вязкоупругая прокладка 7, находящаяся в сжатом состоянии благодаря натягивающим трос 8 гайкам 9. Такая конструкция позволяет изменять степень связи подвижной и неподвижной частей модели в достаточно широких пределах.
Исследования с помощью данной физической модели показали, что рассмотренный алгоритм устойчив к влиянию изменения подвижности опоры нижней челюсти.
Таким образом, заявленный способ реализуют следующим образом:
- прикладывают к зубу переменную силу F1 постоянной амплитуды А и частоты ω, обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измеряют амплитуду смещения зуба Х для зубов верхней и нижней челюстей (по ее величине судят об изменениях опорно-удерживающего аппарата зуба верхней челюсти по сравнению с амплитудой смещения X в физиологической норме);
- затем для зубов нижней челюсти прикладывают к зубу вторую переменную силу F2 с той же величиной амплитуды А, что и для упомянутой переменной силы F1, но с другой частотой  измеряют амплитуду
измеряют амплитуду  смещения зуба;
смещения зуба;
- определяют параметр  пропорциональный разнице амплитуд смещения зуба при переменной силе F1 и при второй переменной силе F2 с учетом конкретных выбранных значений частот ω и
пропорциональный разнице амплитуд смещения зуба при переменной силе F1 и при второй переменной силе F2 с учетом конкретных выбранных значений частот ω и  по которому судят о состоянии опорно-удерживающего аппарата зуба. Для этого сравнивают этот параметр R с параметром RN, полученным по этой же формуле для одноименного зуба нижней или верхней челюсти в физиологической норме. Формула
по которому судят о состоянии опорно-удерживающего аппарата зуба. Для этого сравнивают этот параметр R с параметром RN, полученным по этой же формуле для одноименного зуба нижней или верхней челюсти в физиологической норме. Формула  получена преобразованием формулы (7) для амплитуд Х и
получена преобразованием формулы (7) для амплитуд Х и  подвижности зуба, учитывая, что k в математическом выражении (7) - жесткость, т.е. величина, обратно пропорциональная подвижности.
подвижности зуба, учитывая, что k в математическом выражении (7) - жесткость, т.е. величина, обратно пропорциональная подвижности.
Кроме того, при необходимости выделяют по две составляющие подвижности - упругую и вязкую компоненты р1 и q1 и упругую и вязкую компоненты р2 и q2 на частоте ω для переменной силы F1 одноименных зубов верхней и нижней челюстей соответственно, а также упругую и вязкую компоненты  и
и  на частоте
на частоте  для переменной силы F2 на второй частоте для нижней челюсти. Компоненты р1 и
для переменной силы F2 на второй частоте для нижней челюсти. Компоненты р1 и  синфазны переменным силам F1 и F2, а компоненты q1 и
синфазны переменным силам F1 и F2, а компоненты q1 и  сдвинуты по фазе на 90° в одну сторону относительно F1 и F2. Определяют параметр Rp величин (р2 и
сдвинуты по фазе на 90° в одну сторону относительно F1 и F2. Определяют параметр Rp величин (р2 и  ) с помощью формулы
) с помощью формулы  и Rq (q2 и
и Rq (q2 и  ) с помощью формулы
) с помощью формулы  По величине параметров Rp и Rq судят об упругой и вязкой характеристиках подвижности зуба нижней челюсти по сравнению с параметрами RpN RqN, полученными по этой же формуле для одноименного зуба нижней и/или верхней челюсти в физиологической норме.
По величине параметров Rp и Rq судят об упругой и вязкой характеристиках подвижности зуба нижней челюсти по сравнению с параметрами RpN RqN, полученными по этой же формуле для одноименного зуба нижней и/или верхней челюсти в физиологической норме.
Понятно, что при реализации заявленного способа измерения подвижности зуба исследования и измерения зубов для верхней челюсти, в том числе при патологии или в физиологической норме, могут и не проводиться после достаточного набора статистических данных. Такие измерения на зубах верхней челюсти служат лишь для подтверждения правильности произведенных измерений. Объем настоящего изобретения определяется независимым пунктом формулы, и специалистам понятно, что в заявленный способ могут быть введены дополнительные усовершенствования, которые не изменяют существа этого способа. Например, специалистам понятно, что для повышения точности измерения могут быть проведены не только на двух, но и на нескольких различных частотах.
Осуществление заявленного способа иллюстрируется конкретными примерами.
Пример 1
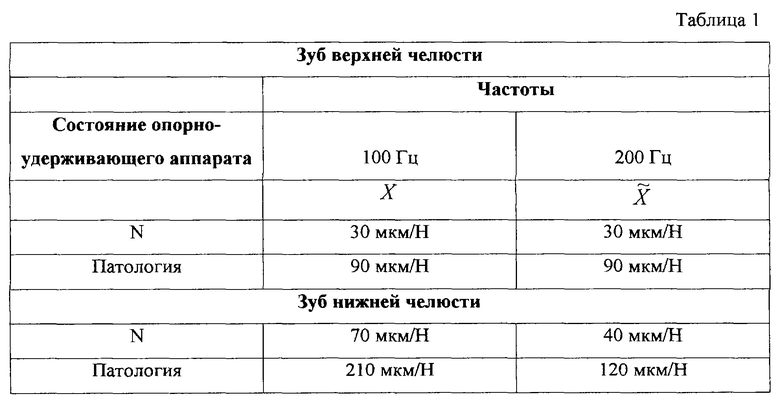
Способ осуществляют при помощи описанного выше оборудования для двух частот ω=100 Гц и  Сначала измеряют параметры амплитуд смещения для зуба верхней челюсти, находящегося в физиологической норме N. Затем измеряют параметры амплитуд смещения одноименного зуба нижней челюсти, находящегося в физиологической норме. Затем определяют параметры зуба с нарушением опорно-удерживающего аппарата зуба для верхней челюсти. Определяют амплитуды смещения одноименного зуба нижней челюсти с теми же нарушениями (определяемые рентгенологически) опорно-удерживающего аппарата. Результаты измерений сведены в табл.1.
Сначала измеряют параметры амплитуд смещения для зуба верхней челюсти, находящегося в физиологической норме N. Затем измеряют параметры амплитуд смещения одноименного зуба нижней челюсти, находящегося в физиологической норме. Затем определяют параметры зуба с нарушением опорно-удерживающего аппарата зуба для верхней челюсти. Определяют амплитуды смещения одноименного зуба нижней челюсти с теми же нарушениями (определяемые рентгенологически) опорно-удерживающего аппарата. Результаты измерений сведены в табл.1.
Как видно из приведенных результатов измерений, параметры амплитуды смещения зуба в зависимости от частоты для верхней челюсти не изменяются. Для нижней челюсти величины амплитуды изменяются в сторону ее увеличения. При этом разница параметров, вычисленная по формуле  для одноименного зуба в норме нижней челюсти (X и
для одноименного зуба в норме нижней челюсти (X и  )N=30 мкм/Н, что соответствует величине ХN=30 мкм/Н верхней челюсти. В случае одинаковой патологии опорно-удерживающего аппарата для одноименных зубов верхней и нижней челюстей разница, вычисленная по той же формуле, при патологии (X и
)N=30 мкм/Н, что соответствует величине ХN=30 мкм/Н верхней челюсти. В случае одинаковой патологии опорно-удерживающего аппарата для одноименных зубов верхней и нижней челюстей разница, вычисленная по той же формуле, при патологии (X и  )P=90 мкм/Н для одноименного зуба нижней челюсти соответствует величине смещения одноименного зуба при патологии ХP=90 мкм/Н верхней челюсти. Это при использовании заявленного способа доказывает возможность исключения из показаний ошибки, вызванной собственной подвижностью нижней челюсти.
)P=90 мкм/Н для одноименного зуба нижней челюсти соответствует величине смещения одноименного зуба при патологии ХP=90 мкм/Н верхней челюсти. Это при использовании заявленного способа доказывает возможность исключения из показаний ошибки, вызванной собственной подвижностью нижней челюсти.
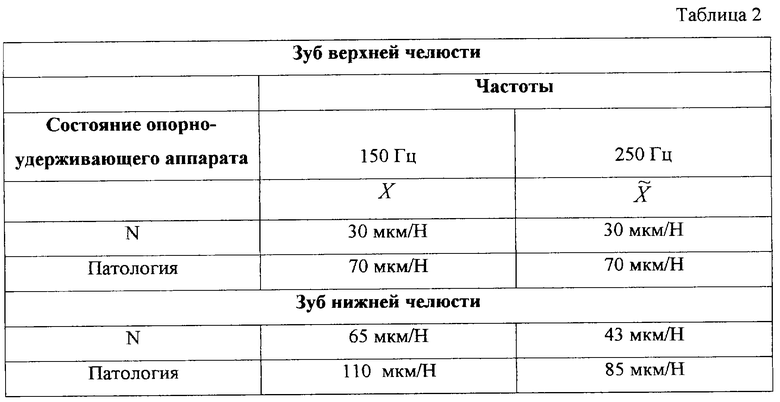
Пример 2
Способ осуществляют аналогично примеру 1 на двух частотах ω=150 Гц и  Результаты измерений сведены в табл.2.
Результаты измерений сведены в табл.2.
Как видно из табл.2, с увеличением частоты параметры амплитуд смещения для зуба нижней челюсти немного приближаются к величинам смещения одноименного зуба нижней челюсти, но все равно резко отличаются от них. В то же время для зуба верхней челюсти, находящегося в физиологической норме (Х)N и  вычисленный по формуле параметр R=30,6.
вычисленный по формуле параметр R=30,6.
Для нижнего зуба с патологическими изменениями опорно-удерживающего аппарата параметр  с учетом выбранных частот равен 70,9 мкм/Н, т.е. также приблизительно равен амплитуде смещения зуба верхней челюсти при патологии ХP=70 мкм/Н.
с учетом выбранных частот равен 70,9 мкм/Н, т.е. также приблизительно равен амплитуде смещения зуба верхней челюсти при патологии ХP=70 мкм/Н.
Таким образом, измерение амплитуд Х и  смещения зуба при переменной силе F1 и при второй переменной силе F2, с соответственно выбранными из указанного интервала частотами ω и
смещения зуба при переменной силе F1 и при второй переменной силе F2, с соответственно выбранными из указанного интервала частотами ω и  и вычисление параметра R позволяет практически исключить влияние нижней челюсти на результат определения патологии.
и вычисление параметра R позволяет практически исключить влияние нижней челюсти на результат определения патологии.
Пример 3
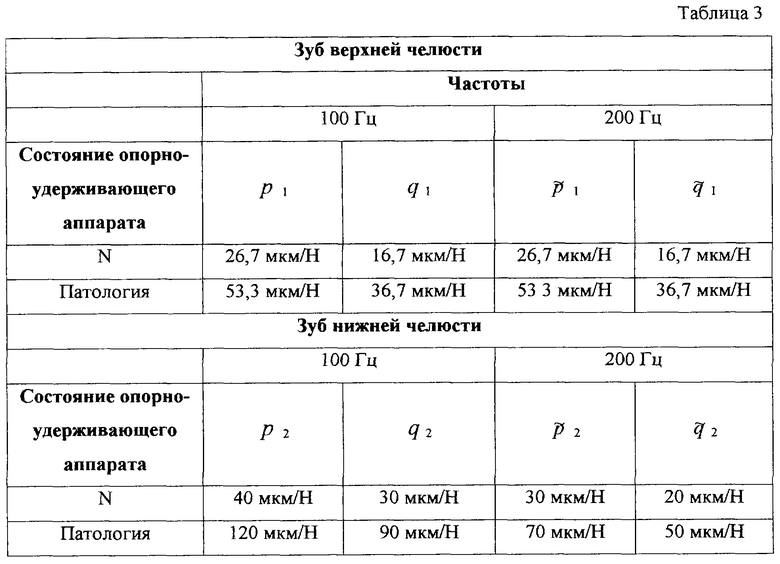
Способ осуществляют аналогично примеру 1 на двух частотах ω=100 Гц и  с выделением упругой и вязкой составляющих р и q. Результаты измерений приведены в табл.3.
с выделением упругой и вязкой составляющих р и q. Результаты измерений приведены в табл.3.
Как следует из табл.3, приведенные соотношения сохраняются при разделении амплитуды смещения на упругую и вязкую составляющие. Действительно, для зуба нижней челюсти в физиологической норме р2(100) и  подставляя в формулу
подставляя в формулу  40 мкм/Н и 30 мкм/Н, получаем Rр=26,7 мкм/Н, что равно для одноименного зуба в физиологической норме верхней челюсти соответствующим параметрам
40 мкм/Н и 30 мкм/Н, получаем Rр=26,7 мкм/Н, что равно для одноименного зуба в физиологической норме верхней челюсти соответствующим параметрам  Соответственно для зуба в физиологической норме нижней челюсти q2 (100) и
Соответственно для зуба в физиологической норме нижней челюсти q2 (100) и  равны 30 мкм/Н и 20 мкм/Н. Вычисляя по формуле
равны 30 мкм/Н и 20 мкм/Н. Вычисляя по формуле  получаем Rq=16,7 мкм/Н. Это значение Rq равно величине вязкой составляющей для одноименного зуба в физиологической норме верхней челюсти
получаем Rq=16,7 мкм/Н. Это значение Rq равно величине вязкой составляющей для одноименного зуба в физиологической норме верхней челюсти 
Для зубов с изменениями в опорно-удерживающем аппарате зуба нижней челюсти р2(100)и  равны соответственно 120 мкм/Н и 70 мкм/Н. Подставляя аналогично в указанную формулу, получаем Rp=53,3 мкм/Н, и этот параметр точно соответствует
равны соответственно 120 мкм/Н и 70 мкм/Н. Подставляя аналогично в указанную формулу, получаем Rp=53,3 мкм/Н, и этот параметр точно соответствует  для зуба верхней челюсти, а q2 и
для зуба верхней челюсти, а q2 и  и 50 мкм/Н. Вычисляя же по формуле с учетом частот ω и
и 50 мкм/Н. Вычисляя же по формуле с учетом частот ω и  получаем Rq=36,7 мкм/Н. Т.е. вычисленная величина Rq для зуба нижней челюсти точно соответствует этому же параметру зуба для верхней челюсти
получаем Rq=36,7 мкм/Н. Т.е. вычисленная величина Rq для зуба нижней челюсти точно соответствует этому же параметру зуба для верхней челюсти  при патологии.
при патологии.
Как показали эксперименты, могут появляться некоторые незначительные расхождения в измеренных параметрах. Это, по-видимому, связано с невозможностью практического нахождения двух одноименных зубов верхней и нижней челюстей с эквивалентными нарушениями их опорно-удерживающего аппарата. Но как следует из проведенных исследований и представленных данных в табл.1-3, заявленный способ практически исключает влияние собственной подвижности нижней челюсти и окружающих мягких тканей, а также влияние различия индивидуальных масс нижних челюстей для каждого пациента или обследования.
Клиническое исследование осуществления способа измерения подвижности зуба продемонстрировало возможность измерения подвижностей как верхней, так и нижней челюсти. Данные эксперимента показали, что точность измерения возросла и измеренные параметры подвижности одноименных зубов верхней и нижней челюсти близки.
Наиболее успешно заявленный способ измерения подвижности зуба может быть промышленно применим в стоматологии для оперативной диагностики состояния опорно-удерживающего аппарата зуба или тканей, окружающих имплантат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПОДВИЖНОСТИ ЗУБА | 2001 |
|
RU2196537C1 |
| Способ экспресс-диагностики состояния опорно-удерживающего аппарата зуба | 2016 |
|
RU2611761C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ОПОРНО-УДЕРЖИВАЮЩЕГО АППАРАТА ЗУБА | 2001 |
|
RU2177759C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ЗУБА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2065724C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ЗУБА | 2005 |
|
RU2279261C1 |
| КОНРОЛИРУЮЩЕЕ УСТРОЙСТВО ПРИБОРА ДЛЯ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ЗУБА | 2000 |
|
RU2171097C1 |
| Устройство для определения подвижности зубов | 2014 |
|
RU2630355C2 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ПАТОЛОГИИ СТРУКТУР СРЕДНЕГО И ВНУТРЕННЕГО УХА | 2011 |
|
RU2484771C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ГИБКОГО РОТОРА НА ЭЛЕКТРОМАГНИТНЫХ ПОДШИПНИКАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2618001C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГИХ ХАРАКТЕРИСТИК СВАИ И ВМЕЩАЮЩЕГО ГРУНТА | 2008 |
|
RU2364852C1 |
Изобретение относится к стоматологии, может быть использовано для диагностики опорно-удерживающего аппарата зуба или тканей, окружающих имплантат. Способ включает приложение к зубу нижней челюсти двух переменных сил с постоянными амплитудами, но разными частотами. Частота второй переменной силы  находится в интервале 1,5-2,5 частоты
находится в интервале 1,5-2,5 частоты  первой переменной силы. Измеряют амплитуды Х и
первой переменной силы. Измеряют амплитуды Х и  смещения зуба для обеих переменных сил. Определяют параметр
смещения зуба для обеих переменных сил. Определяют параметр  . По параметру R судят о состоянии опорно-удерживающего аппарата зуба нижней челюсти. Технический результат - повышение точности и качества диагностирования заболевания, уменьшение погрешности измерения. 1 з. п. ф-лы, 4 ил., 3 табл.
. По параметру R судят о состоянии опорно-удерживающего аппарата зуба нижней челюсти. Технический результат - повышение точности и качества диагностирования заболевания, уменьшение погрешности измерения. 1 з. п. ф-лы, 4 ил., 3 табл.
 , равной 1,5÷2,5 ω, также обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измеряют амплитуду
, равной 1,5÷2,5 ω, также обеспечивающей возвратно-поступательные колебания зуба ниже частоты собственных колебаний зуба, измеряют амплитуду  смещения зуба при второй переменной силе F2, определяют параметр R в соответствии с математическим выражением
смещения зуба при второй переменной силе F2, определяют параметр R в соответствии с математическим выражением  и по параметру R судят о состоянии опорно-удерживающего аппарата зуба для нижней челюсти.
и по параметру R судят о состоянии опорно-удерживающего аппарата зуба для нижней челюсти. смещения зуба при упомянутой переменной силе F1 и при второй переменной силе F2 производят с выделением двух составляющих, соответственно синфазной переменным силам и сдвинутой по фазе относительно них на 90°, по величине которых судят об упругой и вязкой характеристиках подвижности зуба.
смещения зуба при упомянутой переменной силе F1 и при второй переменной силе F2 производят с выделением двух составляющих, соответственно синфазной переменным силам и сдвинутой по фазе относительно них на 90°, по величине которых судят об упругой и вязкой характеристиках подвижности зуба.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ЗУБА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2065724C1 |
| Устройство для определения подвижности зубов | 1989 |
|
SU1648444A1 |
| Способ определения подвижности зубов | 1978 |
|
SU874051A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

