Изобретение относится к оборудованию ленточных конвейеров и предназначено для улавливания ленты наклонных конвейеров в случае ее обрыва.
Наиболее близкими по технической сущности устройством и способом являются устройство и способ по а.с. №882876, кл. В 65 G 43/06, 1981 г. Устройство включает связанные с датчиком обрыва ленты фиксаторы положения, на которых расположен охватывающий ленту конвейера гибкий рабочий орган, огибающий отклоняющий блок и соединенный с приводом. Рабочий орган выполнен в виде петли, свободный конец которой соединен с приводом, а огибаемый свободным концом петли отклоняющий блок расположен под лентой конвейера. Фиксатор выполнен в виде электромагнитной защелки.
Способ улавливания ленты заключается в том, что в случае обрыва по сигналу датчика замыкается электрическая цепь электромагнитных защелок, включается привод, с помощью которого гибкий орган затягивает ленту петлей и отклоняет ее под рабочую ветвь конвейера.
Недостаток этих устройства и способа - значительные усилия, необходимые для удержания ленты, что приводит к неэффективности улавливания ленты.
Технический результат - повышение надежности и быстродействия устройства и способа.
Это достигается тем, что устройство улавливания конвейерной ленты включает конвейерный став, датчик обрыва конвейерной ленты, гибкий элемент, выполненный в виде петли, огибающей грузовую ветвь конвейерной ленты, фиксаторы для гибкого элемента и стационарный упор. Гибкая связь жестко соединена со стационарным упором, расположена сверху вниз вдоль продольной оси конвейера над конвейерной лентой, огибая блоки с провисанием между последними, и своим свободным концом связана с тележкой натяжения конвейерной ленты. Устройство имеет дополнительные гибкие элементы, выполненные в виде петель, огибающих грузовую ветвь конвейерной ленты, и закрепленные в местах максимального провисания гибкой связи на конвейерном ставе над конвейерной лентой поддерживающие рамки, на которых установлены фиксаторы для гибких элементов. Датчик обрыва конвейерной ленты жестко закреплен на гибкой связи. Гибкие элементы закреплены на гибкой связи и снабжены установленными на них с возможностью вращения эластичными роликами, расположенными под конвейерной лентой. Датчик обрыва конвейерной ленты выполнен в виде груза для натяжения конвейерной ленты. Фиксаторы для гибких элементов расположены по периметру поддерживающих рамок. В способе улавливания конвейерной ленты, включающем подачу сигнала датчика обрыва конвейерной ленты, затягивание конвейерной ленты и отклонение ее, конвейерную ленту затягивают петлями из гибких элементов, которые закрепляют на расположенной над конвейерной лентой и соединенной со стационарным упором гибкой связи, при этом сначала производят затяжку, по меньшей мере, ближайшей от датчика обрыва конвейерной ленты петли посредством указанного датчика, который выполняют в виде жестко закрепленного на гибкой связи груза, а последующие петли из гибких элементов затягивают самой конвейерной лентой при ее движении с образованием на ней карманов для груза.
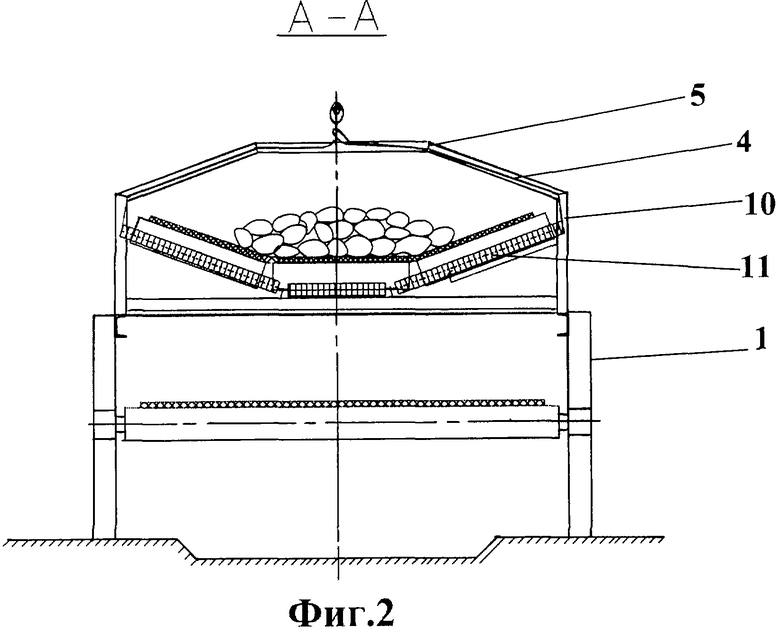
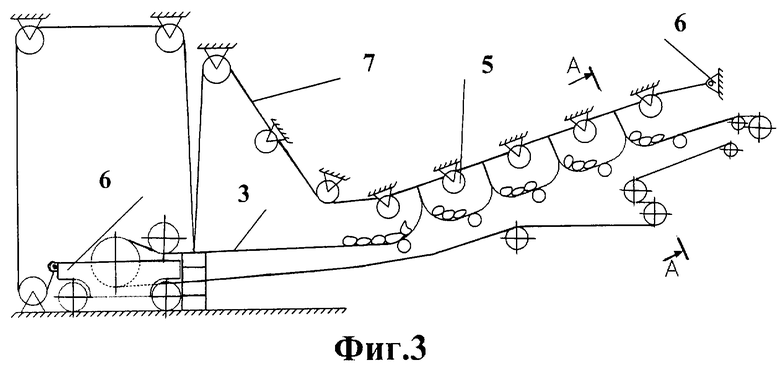
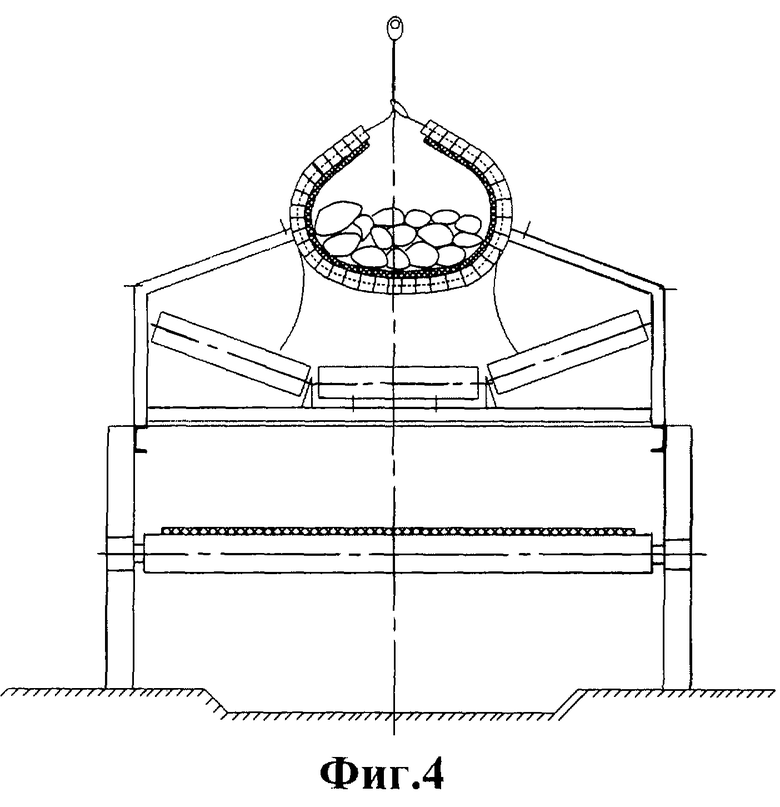
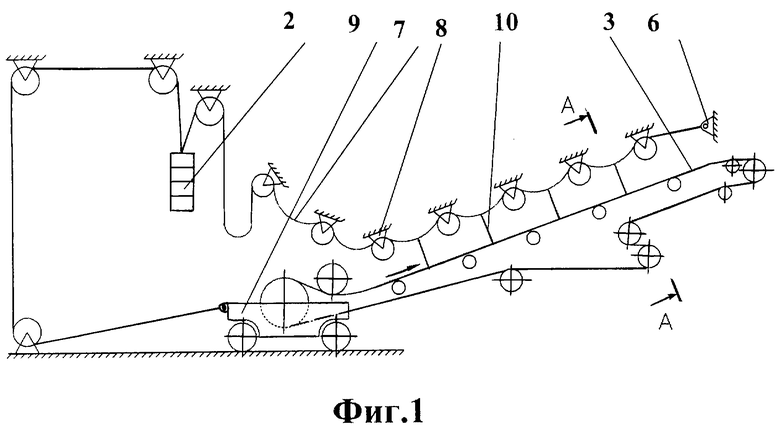
На фиг.1 изображен общий вид устройства; на фиг.2 - поперечный разрез А-А на фиг.1; на фиг.3 - конвейер при обрыве ленты; на фиг.4 - положение ленты при захвате петлей.
Устройство улавливания конвейерной ленты включает конвейерный став 1, датчик 2 обрыва конвейерной ленты 3, гибкие элементы 4, выполненные в виде петли, огибающей грузовую ветвь конвейера, фиксаторы 5 для гибких элементов и стационарный упор 6. Гибкая связь 7 жестко соединена со стационарным упором 6, протянута сверху вниз вдоль продольной оси конвейерной ленты 3, огибая блоки 8 с провисанием между последними, и своим свободным концом связана с тележкой натяжения 9 конвейерной ленты. Гибкие элементы 4 закреплены в местах максимального провисания гибкой связи 7 фиксаторами 5 на поддерживающих рамках 10, установленных на конвейерном ставе 1 над лентой 3. Гибкие элементы 4 снабжены установленными на них с возможностью вращения эластичными роликами 11, расположенными под конвейерной лентой; длина роликов превышает ширину ленты. Фиксаторы 5 для гибких элементов расположены по периметру поддерживающих рамок 10. Датчик 2 обрыва выполнен в виде груза для натяжения конвейерной ленты 3 и жестко закреплен на гибкой связи 7.
Способ улавливания конвейерной ленты включает подачу сигнала датчика 2 обрыва конвейерной ленты 3, затягивание конвейерной ленты и ее отклонение. Конвейерную ленту 3 затягивают петлями из гибких элементов 4, которые закрепляют на расположенной над конвейерной лентой и соединенной со стационарным упором 6 гибкой связи, а последующие петли из гибких элементов затягивают самой конвейерной лентой при ее движении с образованием на ней карманов для груза.
Работа устройства и пример выполнения способа.
При движении грузовой ветви ленты 3 конвейера с транспортируемым грузом вверх датчик 2 находится в верхнем положении и в зависимости от степени натяжения ленты балансирует незначительно в вертикальной плоскости. Тележка 9 натяжения ленты 3 находится в крайнем правом положении.
При обрыве ленты 3 грузовая ветвь устремляется вниз, тележка натяжения 9 перемещается влево, датчик 2 падает вниз. Одновременно выбирается ближайшее к датчику 2 провисание гибкой связи 7 между блоками, где первая петля гибкого элемента 4 разгибает фиксаторы 5, отсоединяется от рамки 10 и затягивает грузовую ветвь ленты 3. Грузовая ветвь ленты 3, соединенная со связью 7, продолжает двигаться вниз и выравнивает последовательно провисания, расположенные выше по конвейеру, осуществляя рабочий ход петель гибких элементов 4. В местах захвата петлями лента 3 поднимается вверх, образуя “карманы”. В результате за счет жесткого присоединения связи 7 к упору 6 и образования “карманов”, куда падает транспортируемый груз, лента останавливается. При затяжке петель нанизанные на них ролики 11 предохраняют края ленты от порыва. Диаметр отверстия роликов 11 достаточен для свободного прохождения петель; вращение роликов 11 облегчает скольжение петли по ленте 3 при затягивании.
Предлагаемый способ прост, позволяет поймать грузонесущую ветвь ленты при порыве в любом месте конвейера, не требует установки привода затяжки петель и датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1983 |
|
SU1115980A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| СПОСОБ УЛАВЛИВАНИЯ ОБОРВАННОГО ГИБКОГО ТЯГОВОГО ОРГАНА ПОДЪЕМНО-ТРАНСПОРТНЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296093C2 |
| КАРКАСНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2232707C2 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279390C1 |
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1980 |
|
SU882876A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279389C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350538C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ УЛАВЛИВАНИЯ ОБОРВАВШЕЙСЯ ЛЕНТЫ НАКЛОННОГО КОНВЕЙЕРА С ИСПОЛЬЗОВАНИЕМ ПОДВЕСНЫХ КАНАТНЫХ ЛОВИТЕЛЕЙ | 2012 |
|
RU2488799C1 |
Изобретение относится к оборудованию ленточных конвейеров и предназначено для улавливания ленты наклонных конвейеров в случае ее обрыва. Устройство улавливания конвейерной ленты включает конвейерный став, датчик обрыва конвейерной ленты, гибкий элемент, выполненный в виде петли, огибающей грузовую ветвь конвейерной ленты, фиксаторы для гибкого элемента. Гибкая связь жестко соединена со стационарным упором, расположена сверху вниз вдоль продольной оси конвейера над конвейерной лентой, огибая блоки с провисанием между последними, и своим свободным концом связана с тележкой натяжения конвейерной ленты. Устройство имеет дополнительные гибкие элементы, выполненные в виде петель, огибающих грузовую ветвь конвейерной ленты, и закрепленные в местах максимального провисания гибкой связи на конвейерном ставе над конвейерной лентой поддерживающие рамки, на которых установлены фиксаторы для гибких элементов. Датчик обрыва конвейерной ленты жестко закреплен на гибкой связи. Гибкие элементы закреплены на гибкой связи и снабжены установленными на них с возможностью вращения эластичными роликами, расположенными под конвейерной лентой. В способе улавливания конвейерной ленты, включающем подачу сигнала датчика обрыва конвейерной ленты, затягивание конвейерной ленты и отклонение ее, конвейерную ленту затягивают петлями из гибких элементов, которые закрепляют на расположенной над конвейерной лентой и соединенной со стационарным упором гибкой связи, при этом сначала производят затяжку, по меньшей мере, ближайшей от датчика обрыва конвейерной ленты петли посредством указанного датчика, который выполняют в виде жестко закрепленного на гибкой связи груза, а последующие петли из гибких элементов затягивают самой конвейерной лентой при ее движении с образованием на ней карманов для груза. Технический результат - повышение надежности и быстродействия устройства и способа. 2 с. и 2 з.п. ф-лы, 4 ил.
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1980 |
|
SU882876A1 |

