Предлагаемое изобретение относится к резервированным следящим гидромеханическим, одноканальным и многоканальным электрогидравлическим приводам, нашедшим широкое распространение в качестве исполнительных механизмов в системах управления летательных аппаратов, и может быть использовано в любой отрасли промышленности, где находят применение высоконадежные системы автоматического управления.
Известны резервированные гидроприводы с замещением гидросистем, в которых гидропитание осуществляется от двух независимых гидросистем, одна из которых является основной, а другая дублирующей. Подключение к приводу дублирующей системы гидропитания осуществляется специальным гидравлическим краном (клапаном переключения), срабатывающим автоматически по падению давления в гидросистеме, от которой работает привод (см. Гониодский В.И. и др. Привод рулевых поверхностей самолетов. М.: Машиностроение, 1974 г., стр. 181, рис. 4.26 (а). Наиболее близким по технической сущности является резервированный следящий электрогидравлический привод системы управления вертолетом (см. патент ФРГ №2931533, кл. F 15 В 20/00, фиг.2).
Известный резервированный следящий электрогидравлический привод (привод) содержит максимальное количество сходных с заявляемым приводом признаков, а именно оба привода относятся к резервированным следящим электрогидравлическим приводам для систем управления летательными аппаратами и содержат однокамерный гидродвигатель с полостными каналами, последовательно соединенные элементы автоматической системы управления (электромагнитный клапан включения, электрогидравлический усилитель мощности и сервоцилиндр), гидрораспределители с механической несиловой проводкой управления приводом, связанной со штоками сервоцилиндров, и клапан переключения гидросистем, сообщенный с двумя независимыми гидравлическими источниками питания.
Достоинством известного привода является то, что в нем за счет применения однокамерного исполнительного гидродвигателя сокращено количество сложных конструктивных элементов, значительно сокращены габариты и масса привода.
Однако существенным недостатком указанного привода является то, что для обеспечения герметичности и минимальных перетоков из одной гидросистемы в другую применяемый в клапане переключения известного привода цилиндрический распределительный золотник по наружной цилиндрической поверхности должен выполняться с высокой точностью и очень незначительной шероховатостью и устанавливаться во внутренний канал гильзы или корпуса с минимально допускаемыми кольцевыми зазорами (4...6 мкм).
Большая вероятность “заклинивания” или затяжеления перемещения такого золотника в процессе работы (например, в случае возможного загрязнения рабочей жидкости) приводит или к отказу привода, или к нестабильности и увеличению времени перекладки золотника, чем существенно снижается надежность работы привода, в то время когда переключение на резервную (аварийную) систему гидропитания летательного аппарата должно быть безотказным и осуществляться практически мгновенно, ибо потеря управления скоростным самолетом хотя бы на доли секунды, в особенности в процессе его послепосадочного пробега, может привести к аварии.
Кроме того, в известном приводе не исключена возможность просадки исполнительного штока гидродвигателя под воздействием внешней нагрузки - шарнирного момента от действия аэродинамических нагрузок на рулевую поверхность в момент, когда они превышают максимальное усилие, развиваемое гидроприводом. Просадка штока, в свою очередь, сопровождается резким толчком (ударом) ручки управления, который психологически воспринимается летчиком как отказ или потеря управления летательным аппаратом, что также относится к существенным недостаткам известного привода.
Недостатком известного привода является также конструктивная сложность выполнения клапана переключения гидросистем, которая во многом обусловлена его расположением между распределительными устройствами (золотниками) и исполнительным гидродвигателем, а также введением специальных устройств, предотвращающих переключение источников гидропитания при кратковременном падении давления или полностью отключающих отказавшую гидросистему питания.
Решаемой технической задачей является повышение надежности привода и, следовательно, надежности системы управления летательного аппарата за счет повышения надежности и быстродействия срабатывания клапана переключения гидросистем привода путем подключения клапана к источникам командного давления, дистанционно управляемым из кабины по сигналам летчика, исключения из клапана прецизионной золотниковой пары с переходом на клапанную систему распределения рабочей среды, при которой обеспечивается высокая чувствительность из-за нулевых перекрытий проходных окон и исключаются условия для возникновения ударной (толчковой) нагрузки на ручке управления летчика в момент воздействия максимальных аэродинамических нагрузок на рулевые поверхности.
Поставленная задача решается тем, что в предлагаемом приводе для системы управления летательным аппаратом, содержащим корпус с нагнетательными и сливными каналами для рабочей жидкости, однокамерный гидродвигатель с полостными каналами, последовательно соединенные электромагнитный клапан включения-кольцевания, электрогидравлический усилитель мощности и сервоцилиндр, гидрораспределитель с механической несиловой проводкой привода, связанной со штоком сервоцилиндра, и клапан переключения гидросистем, сообщенный с двумя независимыми гидравлическими системами питания, согласно изобретению клапан переключения гидросистем выполнен в виде двух опозитно встроенных в общий цилиндрический канал корпуса и разделенных между собой разобщающей втулкой устройств управления с запирающими элементами типа “клапан-седло”, каждое из которых состоит из неподвижно установленных в канале корпуса крышки, направляющего стакана и втулки-седла с уплотнительными кольцами на наружных цилиндрических поверхностях и внутренними ступенчатыми расточками и кинематически связанных между собой подпружиненного обратного клапана, установленного в расточке малой ступени втулки-седла, и подпружиненного плунжера, герметично размещенного в расточке большей ступени направляющего стакана и снабженного внутренней перегородкой, с одной стороны которой размещена пружина, а с другой образована рабочая камера управления с возможностью сообщения ее с подводящей напорной магистралью и через обратный клапан, встроенный в малую ступень расточки направляющего стакана, с напорным каналом исполнительного механизма, при этом расточки больших ступеней втулок-седел обоих устройств управления закольцованы между собой и сообщены со сливным каналом исполнительного механизма, а указанная кинематическая связь выполнена в виде размещенного в расточке малой ступени втулки-седла ступенчатого цилиндрического толкателя с возможностью его осевого перемещения и взаимодействия своими рабочими торцами с торцовой поверхностью перегородки плунжера и поверхностью запорного элемента обратного клапана, выполненного в виде шарика, причем между наружной поверхностью малой ступени толкателя и поверхностью расточки малой ступени втулки-седла установлен гарантированный кольцевой зазор для прохода рабочей среды, а клапан переключения подключен к дистанционно управляемым источникам командного давления.
Перевод работы клапана переключения на клапанную систему распределения рабочей среды и принудительно-дистанционное управление клапаном переключения гидросистем с помощью электромагнитных клапанов, дистанционно управляемых по сигналу летчика, обеспечивает надежное и мгновенное срабатывание клапана переключения при экстремальных и аварийных ситуациях, а установка в клапане переключения гидросистем обратных шариковых клапанов в линиях напорных магистралей (в малых ступенях расточек направляющих стаканов) обеспечивает перекрытие каналов подачи (напора) на момент воздействия внешней нагрузки, превышающей максимальное усилие, развиваемое приводом, чем исключается просадка его исполнительного штока и возникновение удара (толчка) на ручке управления летчика.
Сущность предлагаемого изобретения поясняется чертежами.
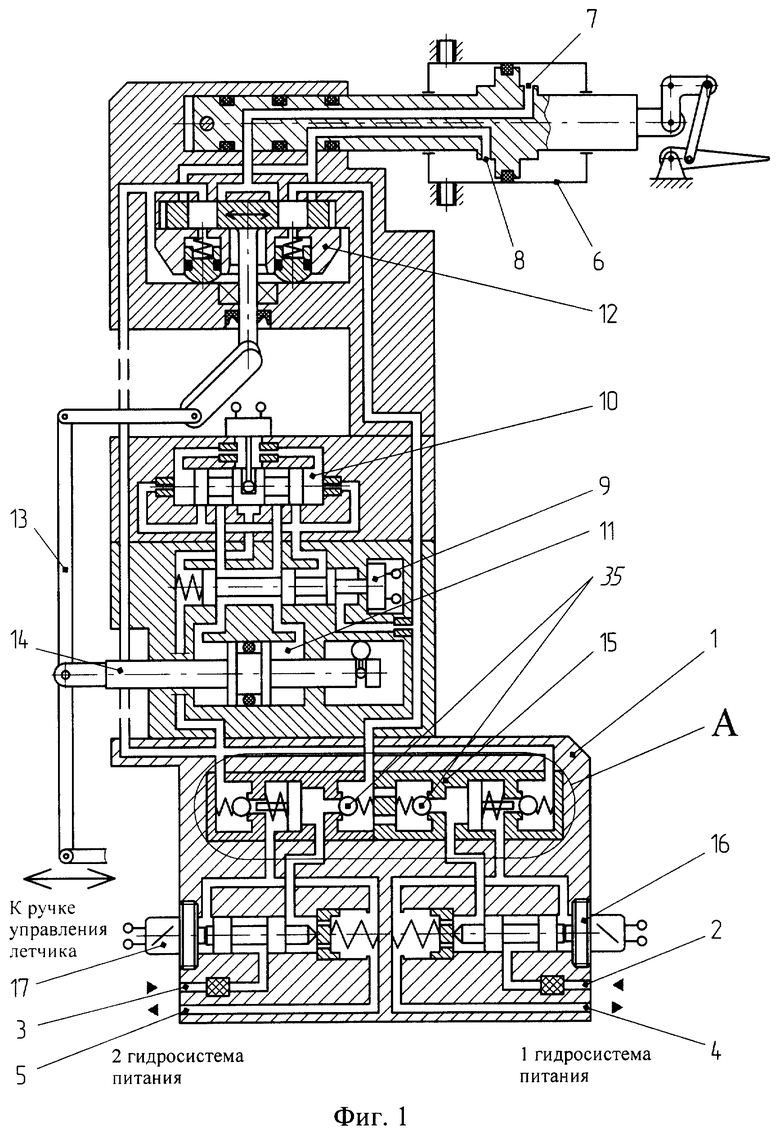
На фиг.1 представлена общая схема привода с клапаном переключения гидросистем с дистанционно управляемыми источниками командного давления - электромагнитными клапанами при работе в составе резервированного следящего электрогидравлического привода в режиме комбинированного управления, при котором ручное управление через входное звено (рычаг) корректируется системой автоматического управления, функционирующей от сигналов автопилота с помощью рулевой машины, включенной по дифференциальной схеме.
Привод оснащен гидрораспределительным устройством с плоским поворотным золотником, отличающимся более высокой надежностью в работе, герметичностью и отсутствием опасности “заклинивания” подвижных элементов (Башта Т.М. Гидравлические приводы летательных аппаратов. М.: Машиностроение, 1967 г., с.239).
На фиг.2 представлен общий вид, разрез клапана переключения гидросистем.
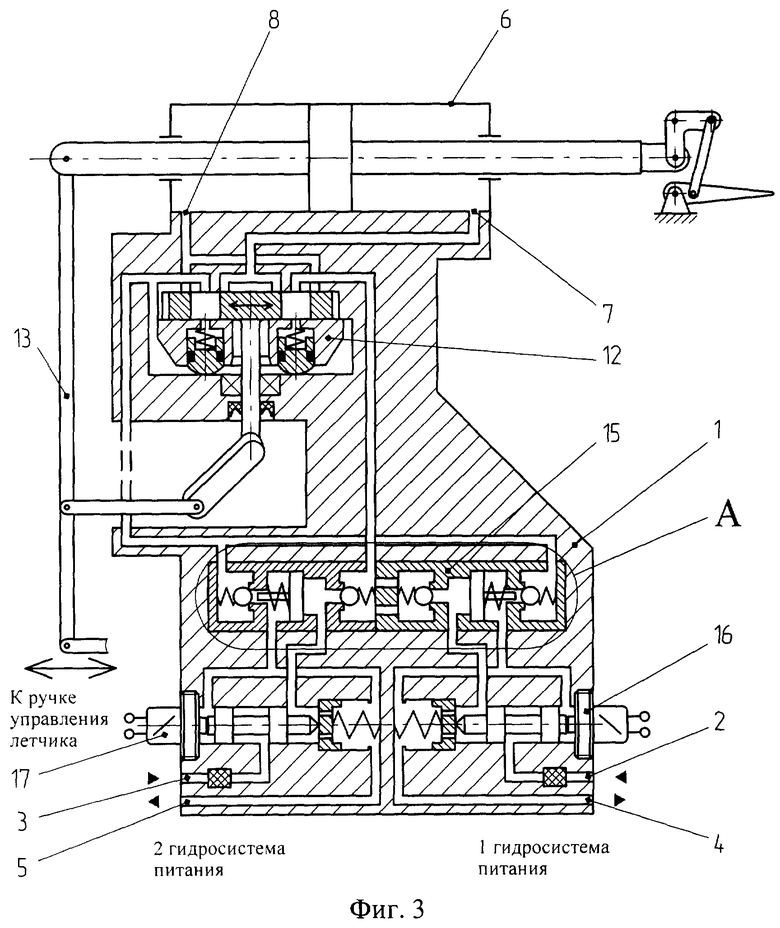
На фиг.3 показана общая схема клапана переключения гидросистем с дистанционно управляемыми источниками командного давления -электромагнитными клапанами при работе в составе гидромеханического рулевого привода с ручным управлением, содержащего гидрораспределитель с плоским поворотным золотником.
На фиг.4 показана общая схема клапана переключения гидросистем с электромагнитными клапанами при работе в составе резервированного следящего электрогидравлического привода с дистанционным управлением, содержащего гидрораспределитель с плоским поворотным золотником.
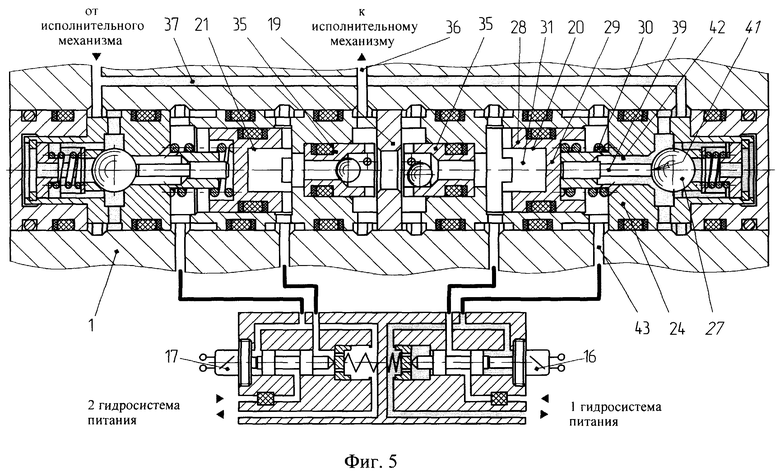
На фиг.5 показан общий вид, разрез клапана переключения при работе от первой гидросистемы питания. На электромагнитный клапан 16 подан электрический сигнал управления. Электромагнитный клапан 17 второй гидросистемы питания обесточен.
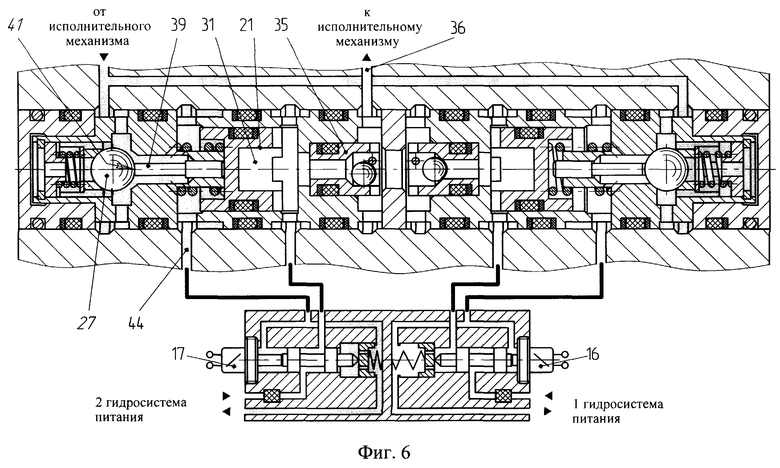
На фиг.6 показан общий вид, разрез клапана переключения при работе от второй гидросистемы питания. На электромагнитный клапан 17 подан электрический сигнал управления. Электромагнитный клапан 16 первой гидросистемы питания обесточен.
Привод (фиг.1) содержит корпус 1 с нагнетательными 2 (3) и сливными 4 (5) каналами для рабочей жидкости, однокамерный гидродвигатель 6 с полостными каналами 7 и 8, электромагнитный клапан включения-кольцевания 9, электрогидравлический усилитель мощности (ЭГУ) 10 и сервоцилиндр 11, гидрораспределитель 12 с механической несиловой проводкой привода 13, связанной со штоком 14 сервоцилиндра 11, и клапан переключения гидросистем 15, сообщенный с двумя независимыми гидравлическими системами питания 2 (4) и 3 (5).
Клапан переключения гидросистем 15 подключен к источникам командного давления - электромагнитным клапанам 16 и 17, дистанционно управляемым из кабины по сигналу летчика.
Клапан переключения гидросистем 15 (фиг.1, 2) выполнен в виде двух опозитно встроенных в общий цилиндрический канал 18 корпуса 1 и разделенных между собой разобщающей втулкой 19 устройств управления 20 и 21 с запирающими элементами типа “клапан-седло”, каждое из которых состоит из неподвижно установленных в канале 18 крышки 22, направляющего стакана 23 и втулки-седла 24, имеющих внутренние ступенчатые расточки 25 и 26 соответственно и кинематически связанных между собой подпружиненного обратного клапана 27, установленного в расточке малой ступени 26 втулки-седла 24 и подпружиненного плунжера 28, герметично размещенного в расточке большей ступени 25 направляющего стакана 23 и имеющего внутреннюю перегородку 29, с одной стороны которой размещена пружина 30, а с другой образована рабочая камера управления 31, сообщающаяся через радиальные каналы 32 плунжера 28 и направляющего стакана 23 с подводящими напорными магистралями 33 и 34, а через обратный клапан 35, встроенный в малую ступень расточки 25 направляющего стакана 23, с напорным каналом 36 исполнительного механизма (гидрораспределителя и рулевой машины).
Расточки 26 больших ступеней втулок-седел 24 обоих устройств управления 20 и 21 закольцованы между собой каналом 37 и соединены со сливным каналом 38 исполнительного механизма. Кинематическая связь между подпружиненным обратным клапаном 27 и подпружиненным плунжером 28 осуществляется через ступенчатый цилиндрический толкатель 39, который своими рабочими торцами 40 и 41 взаимодействует с торцовой поверхностью перегородки 29 плунжера 28 и поверхностью запорного шарика обратного клапана 27. Между наружной поверхностью малой ступени толкателя 39 и поверхностью расточки 26 малой ступени втулки-седла 24 установлен гарантированный кольцевой зазор 42 для прохода рабочей среды в сливной канал 43 или 44.
Привод в режиме ручного управления работает следующим образом.
На электромагнитный клапан 16 первой гидросистемы питания подан электрический сигнал управления (фиг.1, 5). Электромагнитный клапан 17 второй гидросистемы питания обесточен. Под действием электрического сигнала управления якорь электромагнитного клапана 16 выдвигается наружу (по схеме влево), аксиально перемещая подпружиненный золотник на рабочий ход. При этом радиальные каналы высокого давления клапана соединяются и обеспечивают проход рабочей среды в камеру управления 31 устройства управления 20 клапана переключения гидросистем. Далее рабочая жидкость под давлением через обратный клапан 35 и внутренний канал разобщающей втулки 19 поступает в полость обратного клапана 35 другого опозитно расположенного устройства управления 21.
Запорный орган (шарик) клапана 35, закрывая центральный канал подвода напора из второй гидросистемы, обеспечивает проход рабочей среды в канал 36 подающей магистрали к исполнительному механизму (электрогидравлическому усилителю 10 (фиг.1), сервоцилиндру 11, гидрораспределителю 12.
Летчик через тягу механической несиловой проводки 13 перемещает управляющий плоский золотник гидрораспределителя 12. Управляющий золотник, перемещаясь (поворачиваясь на определенный от нейтрального положения угол в ту или другую сторону), сообщает соответствующие полости гидродвигателя 6 с напорным 2 и сливным 4 каналами источника питания.
Под действием рабочего давления в камере управления 31 плунжер 28 устройства управления 20, сжимая пружину 30, перемещается вправо до упора своей торцовой поверхностью перегородки 29 в наружный торец малой ступени втулки-седла 24, аксиально перемещая в ту же сторону ступенчатый цилиндрический толкатель 39, который торцом малой ступени 41 отжимает подпружиненный запорный орган (шарик) 27 от седла-втулки 24, обеспечивая проход сливного давления, поступающего от гидродвигателя по каналу 37, через кольцевой зазор 42 в сливной канал 43, в каналы электромагнитного клапана 16 и в сливную магистраль первой гидросистемы.
Аналогично при подаче электрического сигнала управления на электромагнитный клапан 17 (фиг.1, 6) рабочее давление второй гидросистемы подается в камеру управления 31 устройства управления 21, откуда через обратный клапан 35 поступает в тот же канал 36 подающей магистрали к гидрораспределителю 12, при этом слив от гидродвигателя в сливную магистраль второй гидросистемы происходит через отжатый толкателем 39 обратный клапан 27 устройства управления 21 и сливной канал 44.
Привод в режиме комбинированного управления (ручное управление с коррекцией от автоматической системы управления) работает следующим образом.
Поданы электрические сигналы на электромагнитный клапан 16 первой гидросистемы питания, на электрогидравлический усилитель мощности (ЭГУ) 10 от автоматической системы управления (автопилота), электромагнитный клапан включения-кольцевания 9 (фиг.1,5).
При этом, как и в первом случае, рабочая жидкость из первой гидросистемы питания подается на гидрораспределитель 12, чем обеспечивается ручное управление гидродвигателем 6. Полости сервоцилиндра 11 раскольцовываются и рабочая жидкость поступает к ЭГУ. Рабочая жидкость от ЭГУ через клапан включения-кольцевания 9 поступает в рабочие полости сервоцилиндра 11, который, перемещаясь, передвигает жестко связанный с ним плоский золотник гидрораспределителя 12. Управляющий золотник, перемещаясь, сообщает соответствующие рабочие полости гидродвигателя с напорным 2 или сливным 4 каналами источника питания.
Управляющие сигналы летчика и сигналы от сервоцилиндра суммируются, чем определяется направление, величина и скорость перемещения исполнительного штока привода.
Привод в момент воздействия максимальных аэродинамических нагрузок на рулевые поверхности летательного аппарата работает следующим образом (фиг.1, 2).
Рабочие полости цилиндра гидродвигателя 6 соединены через систему канализации и гидрораспределитель с шариковыми обратными клапанами 35, смонтированными на входе каналов нагнетания 33 и 34 клапана переключения 15. В момент воздействия максимальной аэродинамической нагрузки любого знака на рулевые поверхности летательного аппарата обратный клапан 35 клапана переключения функционирующей системы управления запирает рабочую жидкость цилиндра гидродвигателя 6, благодаря чему ударная нагрузка от шарнирного момента на ручку управления воспринимается запертой в цилиндре жидкостью. Привод в этом случае работает как демпфер, обеспечивая легкое и плавное управление летательным аппаратом.
Привод с клапаном переключения позволяет повысить надежность и эффективность работы самого привода и, следовательно, надежность системы управления летательного аппарата, за счет:
- исключения из конструкции клапана переключения прецизионной золотниковой пары, склонной к “заклиниванию” в случаях работы на загрязненной рабочей жидкости, и перехода на клапанную систему распределения рабочей среды,
- подключения клапана переключения к дистанционно управляемым источникам командного давления,
- исключения возникновения ударной нагрузки на ручке управления летчика в момент воздействия максимальных аэродинамических нагрузок на рулевые поверхности летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| РУЛЕВОЙ АГРЕГАТ | 2006 |
|
RU2313699C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2271306C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2007 |
|
RU2347717C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2008 |
|
RU2370411C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |


Привод предназначен для системы управления летательным аппаратом. Привод содержит корпус с нагнетательными и сливными каналами для рабочей жидкости, однокамерный гидродвигатель с полостными каналами, последовательно соединенные электромагнитный клапан включения-кольцевания, электрогидравлический усилитель мощности и сервоцилиндр, гидрораспределитель с механической несиловой проводкой привода, связанной со штоком сервоцилиндра, и клапан переключения гидросистем, сообщенный с двумя независимыми гидравлическими системами питания, при этом клапан переключения гидросистем выполнен в виде двух оппозитно встроенных в общий цилиндрический канал корпуса и разделенных между собой разобщающей втулкой устройств управления с запирающими элементами типа “клапан-седло”, каждое из которых состоит из неподвижно установленных в канале корпуса крышки, направляющего стакана и втулки-седла с уплотнительными кольцами на наружных цилиндрических поверхностях и внутренними ступенчатыми расточками и кинематически связанных между собой подпружиненного обратного клапана, установленного в расточке малой ступени втулки-седла, и подпружиненного плунжера, герметично размещенного в расточке большей ступени направляющего стакана и снабженного внутренней перегородкой, с одной стороны которой размещена пружина, а с другой образована рабочая камера управления с возможностью сообщения ее с подводящей напорной магистралью и через обратный клапан, встроенный в малую ступень расточки направляющего стакана, с напорным каналом исполнительного механизма, при этом расточки больших ступеней втулок-седел обоих устройств управления закольцованы между собой и сообщены со сливным каналом исполнительного механизма, а указанная кинематическая связь выполнена в виде размещенного в расточке малой ступени втулки-седла ступенчатого цилиндрического толкателя с возможностью его осевого перемещения и взаимодействия своими рабочими торцами с торцовой поверхностью перегородки плунжера и поверхностью запорного элемента обратного клапана, выполненного в виде шарика, причем между наружной поверхностью малой ступени толкателя и поверхностью расточки малой ступени втулки-седла установлен гарантированный кольцевой зазор для прохода рабочей среды. Технический результат - повышение надежности. 1 з.п. ф-лы, 6 ил.
| DE 2931533 A1, 12.02.1981 | |||
| ГОДИОНСКИЙ В.И | |||
| и др | |||
| Привод рулевых поверхностей самолетов | |||
| - М.: Машиностроение, 1974, с.181, рис.4.26 (а) | |||
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2092388C1 |
| НАСОСНЫЙ ГИДРОПРИВОД С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ | 1998 |
|
RU2153435C2 |
| ОПТИЧЕСКИЙ МНОГОСЛОЙНЫЙ ПОЛОСНО-ПРОПУСКАЮЩИЙ ФИЛЬТР | 2013 |
|
RU2538078C1 |

