Предлагаемое изобретение относится к электрогидравлическим следящим приводам большой мощности, предназначенным для перемещения органов управления летательного аппарата по сигналам электродистанционной системы управления полетом. В таких приводах для управления большими расходами и высокими перепадами давлений рабочей жидкости используются силовые гидрораспределители, золотники которых перемещаются специальным исполнительным механизмом сервопривода. Известны электрогидравлические силовые привода по авторским свидетельствам SU 1032691 A1, 20.10.1995, SU 1149541 А1, 10.10.1995, SU 1432936 A1, 20.10.1995, содержащие многоканальную управляющую рулевую машину (РМ) с исполнительными поршнями, жестко закрепленными на общем выходном звене поступательного действия, кинематически связанным с соосно установленными распределительными устройствами, выходы которых гидравлически соединены с двухкамерным силовым гидроцилиндром, а также электрогидравлические силовые привода со сдвоенными исполнительными механизмами [см. книгу П.Г.Редько. Повышение безотказности и улучшение характеристик электроследящих приводов. Москва, издательский центр МГТУ, Станкин, стр.93-103, рис.4.5, рис.4.6], в которых мощный сдвоенный гидроцилиндр с общим выходным штоком управляется двухсистемным силовым гидрораспределителем с сдвоенным золотником, который жестко соединен с поршнями управляющих гидроцилиндров (УГЦ) сервопривода. Каждый из УГЦ является исполнительным механизмом одного из каналов сервопривода, количество которых может составлять в общем случае от двух до четырех.
В состав каждого канала сервопривода входит управляющее устройство - электрогидравлический усилитель (ЭГУ), создающий перепад давления в полостях соответствующих УГЦ, электрогидравлический клапан (ЭГК) включения и выключения канала, клапан включения и кольцевания (КВК) полостей УГЦ.
Для снижения взаимонагружения в каждом из каналов сервопривода используется цепь гидромеханической коррекции, включающая в себя корректирующий клапан (КК), корректирующий гидроцилиндр (КГЦ) с датчиком коррекции (ДК).
К недостаткам перечисленных выше приводов необходимо отнести:
большую массу и габариты;
сложность кинематической связи золотников силовых гидрораспределителей и исполнительных поршней УГЦ;
низкую надежность из-за большого количества элементов гидрологики (ЭГУ, ЭГК, КВК, КК, КГЦ);
значительные неуправляемые перемещения исполнительного выходного штока при появлении активных отказов, например ЭГУ, которые связаны с ограниченным быстродействием при отключении неисправного канала (быстродействие последовательно включаемых ЭГК и КВК равно 0,1...0,15 с);
значительные непроизводительные утечки рабочей жидкости через ЭГУ, ЭГК, КВК, КК, КГЦ.
Наиболее близким, принятым за прототип предлагаемого изобретения, является электрогидравлический рулевой привод (привод) с сдвоенным исполнительным механизмом и линейным электродвигателем (ЛЭД), который непосредственно управляет положением золотника силового распределителя [см. книгу П.Г.Редько. Повышение безотказности и улучшение характеристик электроследящих приводов. Москва, издательский центр МГТУ, Станкин, стр.134-140, рис.5.1, рис.5.2]. Такой привод, за счет исключения из состава ЭГУ, ЭГК, КВК, КК, КГЦ, обладает рядом преимуществ, а именно:
- повышена структурная надежность;
- уменьшены непроизводительные утечки;
- уменьшены неуправляемые перемещения исполнительного выходного штока при появлении активных отказов (отключение неисправной обмотки ЛЭД длится не более 0,01...0,015 с).
Недостатками указанного привода являются большие габариты ЛЭД и его большая электрическая мощность, которую необходимо затратить на непосредственное перемещение сдвоенного золотника гидрораспределителя, который должен иметь большие габариты, так как управляет большими расходами рабочей жидкости при высоких перепадах давлений. При этих условиях возникают большие гидродинамические силы, значительное трение, которые необходимо преодолевать. Эти обстоятельства приводят к возникновению повышенной зоны нечувствительности в электрическом канале управления, что снижает статическую и динамическую точность следящего привода. Технической задачей изобретения является усовершенствование электрогидравлического рулевого привода, взятого за прототип, путем уменьшения габаритов и массы, улучшения качества управления с обеспечением высокой стабильности динамических и статических характеристик.
Поставленная задача решается тем, что в заявляемом электрогидравлическом следящем приводе, содержащем мощный сдвоенный гидроцилиндр с общим выходным штоком и датчиками обратной связи по положению, дополнительно введен сервопривод (РМ), в котором силовой гидрораспределитель и гидроцилиндры сервопривода выполнены в виде единого цилиндра, рабочим элементом которого является ступенчатый плунжер, на котором дополнительно введены бурты и ступени, что позволило образовать полости гидроцилиндров сервопривода на торцах плунжера для одной гидросистемы и на ступенях плунжера для другой гидросистемы. Такое техническое решение исключило кинематические связи золотников силового гидрораспределителя и исполнительных поршней сервопривода, повысило статическую и динамическую точность привода и значительно уменьшило габариты и массу,
Управление гидроцилиндрами сервопривода производится малогабаритным линейным электродвигателем с несколькими управляющими обмотками, в частности четырьмя, в соответствии с кратностью резервирования электрических цепей управления. Каждая управляющая обмотка ЛЭД раздельно подключены к усилителям мощности соответствующих каналов электронной части привода. Якорь ЛЭД жестко соединен с двухсистемным золотником гидрораспределителя, который управляет скоростью двухсистемной РМ. Позиционная обратная связь с выхода РМ на вход ЛЭД образует внутренний контур управления привода - сервопривод с 4-мя резервными электрическими каналами. Таким образом, образуются два позиционных контура: внутренний контур - контур сервопривода и внешний позиционный, охватывающий и силовой гидроцилиндр и сервопривод. В этом случае все нелинейности элементов привода оказываются охваченными обратными связями, что позволило повысить его динамическую точность, особенно в области малых входных сигналов.
Гидрораспределитель сервопривода на две гидросистемы реализован следующим образом.
В стальной корпус гидрораспределителя установлена стальная гильза с одинаковыми коэффициентами линейного расширения, с натягом по наружному диаметру, с ориентацией ее в корпусе по линии гидравлических каналов, которые выполнены для напора и слива на гильзе в виде канавок на половине диаметра, с двумя дросселирующими окнами, расположенными диаметрально противоположно, а каналы для полостей цилиндров сервопривода выполнены в виде отверстий с противоположной стороны диаметра гильзы, которые совпадают с отверстиями в корпусе. Такое выполнение каналов на гильзе и установка ее в корпус с натягом без уплотнительных узлов позволило значительно сократить габариты и массу гидрораспределителя. В гильзе размещен сдвоенный золотник, который через гибкий стержень механически соединен с якорем ЛЭД и центрирующей пружиной, которая соосно закреплена относительно якоря ЛЭД и золотника.
В гильзу с малым диаметральным зазором 0,002...0,004 мм установлен сдвоенный золотник, что обеспечивает малые непроизводительные утечки и не требуется уплотнения между гидросистемами. В сдвоенном золотнике по сливу каждой гидросистемы выполнены одинаковые отрицательные осевые гидравлические перекрытия, равные примерно диаметральному зазору, что позволяет практически исключить взаимонагружение каналов, а также обеспечивает кольцевание полостей УГЦ по отказавшей гидросистеме.
Перечисленные причины позволили применить ЛЭД минимальных размеров и мощности.
Расход рабочей жидкости для управления гидроцилиндрами сервопривода незначителен (до 1 л/мин), поэтому величина гидродинамических сил, действующих на золотник, достаточно мала, это позволило применить ЛЭД минимальных размеров и мощности.
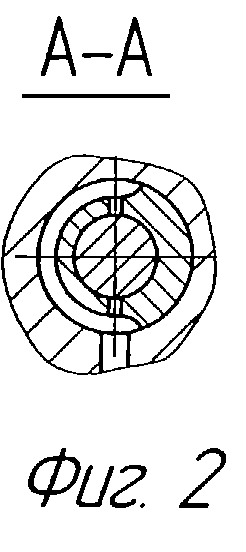
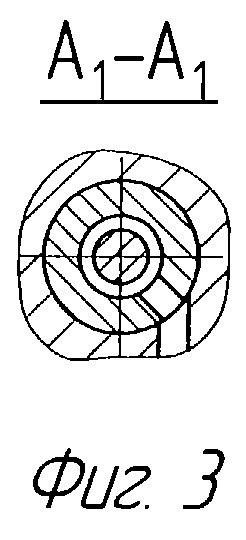
Сущность предлагаемого изобретения поясняется чертежом, где на фиг.1 показана принципиальная схема электрогидравлического следящего привода (привода), на фиг.2 и фиг.3 - схемы выполнения гидравлических каналов.
Привод содержит сдвоенный силовой гидроцилиндр 1 с общим исполнительным штоком 2, связанным с датчиком обратной связи (ДОС 1) - количество каналов ДОС 1 соответствует количеству электронных каналов управления. В корпус 3 с гидравлическими каналами, установлен цилиндр 4, внутри которого размещается ступенчатый плунжер 5 с буртами для распределения потоков рабочей жидкости, поступающей от двух гидросистем, в рабочие камеры гидроцилиндра 1, с дополнительными буртами и ступенями, которые образовали исполнительные полости П1 и П2, П3 и П4 гидроцилиндров сервопривода. Плунжер 5 соединен с датчиками обратной связи (ДОС 2) сервопривода - количество каналов ДОС 2 соответствует количеству электронных каналов управления. Гидрораспределитель сервопривода выполнен следующим образом:
В стальной корпус 6 с гидравлическими каналами с натягом по наружному диаметру установлена стальная гильза 7 с одинаковыми коэффициентами линейного расширения, строго ориентированная по линии гидравлических каналов для их совпадения с каналами в корпусе, так как на гильзе каналы напора и слива выполнены в виде канавок только на половине диаметра (см. фиг.2 сеч. А-А) с двумя дросселирующими щелями, а каналы напора в полости П1, П2, П3, П4 сервопривода выполнены между ними в виде отверстий без канавок на диаметре втулки (см. фиг.3 сеч. А1-А1), которые совпадают с отверстиями в корпусе. В гильзе 7 размещен сдвоенный золотник 8, который через гибкий стержень 9 механически соединен с якорем 10 ЛЭД и центрирующей пружиной 11, которая соосно закреплена относительно якоря ЛЭД и золотника 8. Такое соединение обеспечивает их соосность относительно друг друга, незначительное сухое трение. Привод работает следующим образом. При включенном электро- и гидропитании рабочая жидкость под давлением поступает к средним канавкам плунжера 5 и одновременно к средним буртам золотника 8. При отсутствии сигналов управления и замкнутых обратных связях привода в полостях силового гидроцилиндра 1 и полостях П1 и П2, П3 и П4 сформируются перепады давлений, которые будут удерживать исполнительный шток 2 и плунжер 5 в исходном нейтральном положении без движения. При подаче в обмотки ЛЭД сигналов управления якорь 10 смещает золотник 8 в сторону, зависящую от полярности сигналов управления на величину, пропорциональную величине сигналов управления. При этом одни из полостей, например П1 и П3, соединяются с линией напора гидросистем, другие, например П2 и П4, - с линией слива. Плунжер 5 перемещается и соединяет соответствующие полости гидроцилиндра 1 с линиями напора гидросистем, другие - с линиями слива, исполнительный шток 2 движется с заданной скоростью и перепадом давлений. При перемещениии плунжера 5 и исполнительного штока 2, связанные с ними ДОС1 и ДОС2 формируют сигналы обратной связи, пропорциональные перемещению, которые поступают на вход привода и уменьшают сигналы управления до нуля. Под действием пружины 11 якорь ЛЭД и золотник 8 занимают нейтральное положение, изменение перепадов давлений в полостях П1 и П2, П3 и П4 вернет плунжер 5 в нейтральное положение, движение исполнительного штока 2 прекратится.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2007 |
|
RU2347717C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2271306C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С НЕРЕВЕРСИВНЫМ НАСОСОМ | 2011 |
|
RU2484314C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
Изобретение относится к электрогидравлическим следящим приводам большой мощности, предназначенным для перемещения органов управления летательного аппарата по сигналам электродистанционной системы управления полетом. Устройство содержит сдвоенный силовой гидроцилиндр с позиционной обратной связью, сервопривод с сдвоенным двухсистемным силовым гидрораспределителем и управляющими гидроцилиндрами сервопривода, а также сдвоенный двухсистемный гидрораспределитель сервопривода. Силовой гидрораспределитель и управляющие гидроцилиндры сервопривода выполнены в виде единого цилиндра со ступенчатым плунжером. Последний дополнительно снабжен буртами и ступенями с образованием полостей управляемых гидроцилиндров сервопривода на торцах плунжера для одной гидросистемы и на ступенях плунжера для другой гидросистемы. Изобретение позволяет уменьшить мощность линейного электродвигателя, его габариты и массу, а также улучшить статическую и динамическую точность устройства. 1 з.п. ф-лы, 3 ил.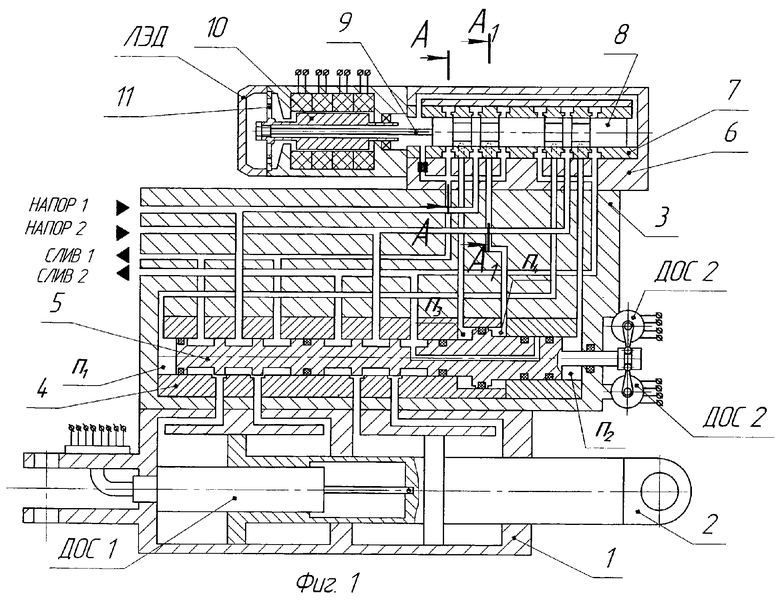
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2133386C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2131064C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1996 |
|
RU2116524C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД | 1987 |
|
SU1432936A1 |

