Изобретение относится к сельскому хозяйству и предназначено для дифференцированного внесения удобрений, преимущественно органических, в зависимости от распределения гумуса и питательных элементов по площади обрабатываемого поля для выравнивания пестроты плодородия почвы и подготовки поля для посева или посадки определенной культуры.
Известно устройство контроля и корректировки дозирования удобрений, содержащее микропроцессорный контроллер и блоки, служащие для переработки поступающей информации, в том числе от датчика пути фотоэлектрического типа, установленного на ведомом колесе трактора, и выдачи светового и звукового сигналов (подсказки) для своевременного и правильного воздействия оператора на корректор привода подающего транспортера (дозатора), включающий гидроцилиндр, введенный в кривошипно-шатунный механизм (Малаков Ю.Ф. "Устройство контроля и корректировки дозирования удобрений". журнал "Тракторы и сельскохозяйственные машины", 2000 г., №12, с.32-33).
Недостатки этого известного устройства заключаются в низкой надежности работы фотоэлектрического датчика пути, устанавливаемого на колесе трактора, и необходимости участия оператора (тракториста) в изменении дозирования подачи удобрений по сигналу, вырабатываемому микропроцессором.
Наиболее близким аналогом предлагаемого изобретения является устройство для дифференцированного внесения удобрений, преимущественно органических, включающее перемещаемое транспортным средством приспособление для внесения удобрений, состоящее из дозирующего транспортера, подающего вносимые удобрения к распределяющим органам, и его привода, управляющий механизм которого связан с автоматической системой контроля и корректировки дозирования удобрений, имеющей блок электронных карт поля, микропроцессорное устройство и средство позиционирования на электронной карте поля приспособления для внесения удобрений, содержащее датчик пройденного транспортным средством пути (патент Российской Федерации №2189129, МПК А 01 С 3/06, опубликованный 20.09.2002).
Недостаток данного известного устройства заключается в низком качестве распределения вносимой массы удобрений и невысокой степени выравнивания пестроты плодородия почвы по площади обрабатываемого поля, обусловленных низкой точностью позиционирования приспособления для внесения удобрений на этом поле, поскольку данное устройство способно контролировать только длину пройденного транспортным средством пути и не контролирует поперечные перемещения последнего.
Задачей настоящего изобретения является расширение арсенала технических средств, предназначенных для дифференцированного внесения удобрений в почву полей, при повышении качества распределения вносимой массы удобрений и степени выравнивания пестроты плодородия почвы по площади обрабатываемого поля путем повышения точности позиционирования приспособления для внесения удобрений на этом поле.
Решение поставленной задачи достигается тем, что в устройстве для дифференцированного внесения удобрений, преимущественно органических, включающем перемещаемое транспортным средством приспособление для внесения удобрений, состоящее из дозирующего транспортера, подающего вносимые удобрения к распределяющим органам, и его привода, управляющий механизм которого связан с автоматической системой контроля и корректировки дозирования удобрений, имеющей блок электронных карт поля, микропроцессорное устройство и средство позиционирования на электронной карте поля приспособления для внесения удобрений, содержащее датчик пройденного транспортным средством пути, согласно изобретению средство позиционирования на электронной карте поля приспособления для внесения удобрений дополнительно содержит два измерительных блока: радиолокационный и навигационный, соединенные соответственно с вычислительным блоком и упомянутым микропроцессорным устройством, при этом выходы последних через согласующее звено связаны с бортовым компьютером, первый выход которого соединен с первым входом блока сравнения, причем второй вход блока сравнения связан с блоком электронных карт поля, а выход блока сравнения соединен с управляющим механизмом привода дозирующего транспортера приспособления для внесения удобрений, при этом навигационный измерительный блок связан с инерциальными датчиками, размещенными на гиростабилизированной платформе, установленной на транспортном средстве, оснащенном также приемно-передающей антенной для связи с радиолокационным измерительным блоком, кроме того, на транспортном средстве установлен датчик его поперечного перемещения, причем блок электронных карт поля, датчик пройденного транспортным средством пути и датчик его поперечного перемещения подключены к бортовому компьютеру, второй выход которого соединен с монитором, размещенным в кабине транспортного средства.
В качестве датчика пройденного транспортным средством пути может быть использован индукционный датчик частоты вращения ведущих колес транспортного средства, а в качестве датчика поперечного перемещения транспортного средства может быть использован преобразователь угла поворота рулевого колеса транспортного средства от нейтрального положения в электрический сигнал.
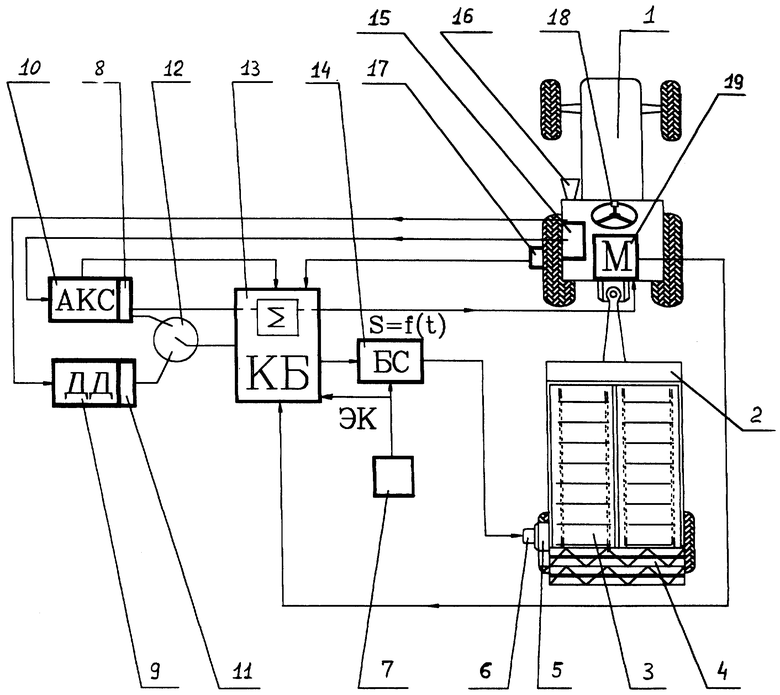
Сущность изобретения поясняется чертежом, на котором показана схема устройства для дифференцированного внесения удобрений.
Устройство для дифференцированного внесения удобрений, преимущественно навоза, включает перемещаемое транспортным средством 1, например трактором, приспособление 2 для внесения удобрений, например навозоразбрасыватель, состоящее из дозирующего транспортера 3, подающего вносимые удобрения к распределяющим органам 4, например разбрасывающим роторам, и бесступенчатого привода 5 транспортера 3. Управляющий механизм 6 привода 5 связан с автоматической системой контроля и корректировки дозирования удобрений, имеющей блок 7 электронных карт поля, микропроцессорное устройство 8 и средство позиционирования на электронной карте поля приспособления 2 для внесения удобрений.
Средство позиционирования на электронной карте поля приспособления 2 для внесения удобрений содержит два измерительных блока: радиолокационный 9 и навигационный 10. Радиолокационный измерительный блок 9 соединен с вычислительным блоком 11, а навигационный измерительный блок 10 - с микропроцессорным устройством 8. Выходы вычислительного блока 11 и микропроцессорного устройства 8 через согласующее звено 12 связаны с бортовым компьютером 13, первый выход которого соединен с первым входом блока сравнения 14. Второй вход блока сравнения 14 связан с блоком 7 электронных карт поля, а выход блока сравнения 14 соединен с управляющим механизмом 6 бесступенчатого привода 5 дозирующего транспортера 3 приспособления 2 для внесения удобрений. Навигационный измерительный блок 10 связан с инерциальными датчиками (на чертеже не показаны), размещенными на гиростабилизированной платформе 15, установленной на транспортном средстве 1, оснащенном также приемно-передающей антенной 16 для связи с радиолокационным измерительным блоком 9.
Кроме того, средство позиционирования на электронной карте поля приспособления 2 для внесения удобрений содержит установленные на транспортном средстве 1 датчик 17 пройденного транспортным средством 1 пути и датчик 18 поперечного перемещения транспортного средства 1. Блок 7 электронных карт поля, датчик 17 пройденного транспортным средством 1 пути и датчик 18 поперечного перемещения транспортного средства 1 подключены к бортовому компьютеру 13, второй выход которого соединен с монитором 19, размещенным в кабине транспортного средства 1. В частном случае предпочтительного конструктивного выполнения устройства для дифференцированного внесения удобрений в качестве датчика 17 пройденного транспортным средством 1 пути использован индукционный датчик частоты вращения ведущих колес транспортного средства 1, а в качестве датчика 18 поперечного перемещения транспортного средства 1 использован преобразователь угла поворота рулевого колеса транспортного средства 1 от нейтрального положения в электрический сигнал.
Основным элементом измерительной части средства позиционирования на электронной карте поля приспособления 2 для внесения удобрений является инерциальный навигационный блок 10, который выполнен в виде двухмерного акселерометра и служит для определения положения управляемого транспортного средства 1, а следовательно, и приспособления 2 для внесения удобрений в пространстве двух координат: продольной и поперечной, т.е. пройденного им пути и бокового отклонения. Это определяется двойным интегрированием сигнала инерциального датчика (акселерометра), пропорционального ускорению движения транспортного средства 1. Инерциальные датчики (акселерометры) размещены на гиростабилизированной платформе 15, обеспечивающей их независимость от внешних динамических помех и силовых воздействий, способных повлиять на заданное положение датчика в пространстве.
Второй элемент измерительной части средства позиционирования на электронной карте поля приспособления 2 для внесения удобрений, определяющий истинную скорость продольного движения транспортного средства 1 по поверхности поля, выполнен в виде доплеровского измерителя скорости, который состоит из приемно-передающей антенны 16 и вычислительного блока 11, предназначенного для преобразования разности частот по Доплеру (эффект Доплера) в сигнал, соответствующий скорости движения транспортного средства 1.
Средство позиционирования на электронной карте поля приспособления 2 для внесения удобрений снабжено также датчиком 17 пройденного транспортным средством 1 пути, в качестве которого использован индукционный датчик частоты вращения ведущих колес транспортного средства 1, соединенный через бортовой компьютер 13 с монитором 19, обеспечивающим визуальный контроль текущего положения транспортного средства 1 и приспособления 2 для внесения удобрений на фоне изображения электронной карты поля, вводимой в бортовой компьютер 13 через блок 7 электронных карт поля. Кроме того, средство позиционирования на электронной карте поля приспособления 2 для внесения удобрений имеет датчик 18 поперечного перемещения транспортного средства 1, в качестве которого использован преобразователь угла поворота рулевого колеса транспортного средства 1 от нейтрального положения в электрический сигнал. Датчик 18 связан через алгебраический сумматор бортового компьютера 13 с монитором 19, установленным в кабине транспортного средства 1, в результате чего поперечные отклонения приспособления 2 для внесения удобрений от заданного захвата, возникающие в результате его стохастических отклонений от технологического движения вследствие той или иной неточности при ручном управлении транспортным средством 1, демонстрируются на мониторе 19.
Устройство для дифференцированного внесения удобрений работает следующим образом. Информацию о распределении гумуса и питательных элементов в почве соответствующего поля получают любым известным способом, например путем взятия проб почвы или с помощью орбитального спутника, позволяющего производить измерения состояния поля относительно фиксированной системы координат. Используя данную информацию, составляют электронную карту поля, содержащую коды текущих параметров автоматической настройки устройства для дифференцированного внесения удобрений по ходу выполнения операций внесения удобрений.
При въезде на поле оператор (тракторист) нажимает сигнальную кнопку, запуская тем самым в работу автоматическую систему контроля и корректировки дозирования удобрений, в блок 7 электронных карт которой предварительно введена электронная карта данного поля, и средство позиционирования на электронной карте поля приспособления для внесения удобрений. При этом фиксируется начало движения транспортного средства 1 с приспособлением 2 для внесения удобрений с одновременным их отображением на электронной карте поля, которая демонстрируется на мониторе 19.
Сигнал, выдаваемый в соответствии с электронной картой поля, введенной в блок 7 электронных карт поля, и характеризующий обеспеченность питательными веществами почвы каждого его квадрата, поступает в блок сравнения 14, первый вход которого соединен с первым выходом бортового компьютера 13, пропорциональным заданному уровню обеспеченности питательными веществами почвы соответствующего квадрата поля. Значение начальной дозы подлежащих внесению удобрений, соответствующее разности между ее заданным уровнем и указанным для данного квадрата поля на электронной карте поля содержанием в почве питательных веществ, из блока сравнения 14 поступает в управляющий механизм 6 бесступенчатого привода 5 дозирующего транспортера 3, выдающего соответствующее количество удобрений к распределяющим органам 4 приспособления 2 для внесения удобрений. При дальнейшем движении транспортного средства 1 с приспособлением 2 для внесения удобрений сигнал от радиолокационного измерительного блока 9, а при нечеткости сигнала - от навигационного измерительного блока 10 поступает через микропроцессорное устройство 8 и согласующее звено 12 в интегратор бортового компьютера 13, который выдает сигнал входа транспортного средства 1 с приспособлением 2 для внесения удобрений на соответствующий участок поля, отличающийся по плодородию почвы от предыдущего, а также значение требуемого уровня обеспеченности удобрениями данного участка поля в блок сравнения 14, второй вход которого связан с блоком 7 электронных карт поля. Сигнал, пропорциональный разности количеств удобрений, имеющихся в почве данного квадрата поля и заданных соответствующей новой дозой внесения, поступает в управляющий механизм 6 бесступенчатого привода 5 дозирующего транспортера 3 и требуемая доза удобрений вносится распределяющими органами 4 на заданный квадрат поля. После этого процесс повторяется.
Одновременно с этим пройденный путь с условным изображением транспортного средства 1 с приспособлением 2 для внесения удобрений отображается на экране монитора 19, а момент перемещения транспортного средства 1 с приспособлением 2 для внесения удобрений на следующий участок электронной карты поля сопровождается звуковым сигналом и автоматическим определением длины сторон квадрата, равной фактически пройденному транспортным средством 1 с приспособлением 2 для внесения удобрений пути до границы следующего участка электронной карты поля.
В процессе движения транспортного средства 1 вдоль рабочего гона из-за неточности поддержания захвата приспособления 2 для внесения удобрений, вызываемой случайными отклонениями транспортного средства 1 от прямолинейного движения, накапливается суммарное отклонение, измеряемое датчиком 18 поперечного перемещения транспортного средства 1, которое также выводится на экран монитора 19. Эта информация может использоваться оператором (трактористом) для повышения качества вождения и тем самым более полного использования технических возможностей и повышения производительности устройства для дифференцированного внесения удобрений.
Специалисту в данной области сельского хозяйства должно быть понятно, что под термином "удобрения" при описании конструкции и работы предлагаемого устройства для дифференцированного внесения удобрений подразумеваются любые удобрения: органические и минеральные, жидкие и твердые, а также любые химические мелиоранты, структурообразователи и раскислители почвы.
Данное изобретение обеспечивает повышение качества распределения вносимой массы удобрений и степени выравнивания пестроты плодородия почвы по площади обрабатываемого поля благодаря повышению точности позиционирования приспособления для внесения удобрений на этом поле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для внесения минеральных удобрений | 2019 |
|
RU2726558C1 |
| УСТАНОВКИ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ОРГАНИЧЕСКИХ УДОБРЕНИЙ | 2000 |
|
RU2189129C2 |
| Устройство точечного дозированного внесения минерального гранулированного удобрения в почву | 2022 |
|
RU2820668C2 |
| МАШИНА ДЛЯ ПОВЕРХНОСТНОГО ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ | 1998 |
|
RU2143192C1 |
| Способ предуборочной десикации посевов сельскохозяйственных культур переменной нормой внутри одного поля | 2019 |
|
RU2717933C1 |
| СПОСОБ УСКОРЕННОГО ВЫДЕЛЕНИЯ УСТОЙЧИВЫХ ВНУТРИПОЛЬНЫХ КОНТУРОВ ПОЧВЕННОГО ПЛОДОРОДИЯ НА СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПОЛЯХ | 2011 |
|
RU2455660C1 |
| Способ определения качества внесения твердых гранулированных минеральных удобрений | 2019 |
|
RU2725787C1 |
| МАШИНА ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2003 |
|
RU2239303C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Автоматизированная система покоординатного измерения урожайности, дозирования и расфасовки сельскохозяйственных культур | 2018 |
|
RU2677045C1 |
Изобретение относится к сельскому хозяйству и предназначено для дифференцированного внесения удобрений в зависимости от распределения гумуса и питательных элементов по площади обрабатываемого поля для выравнивания пестроты плодородия почвы и подготовки поля для посева или посадки определенной культуры. Устройство включает перемещаемое транспортным средством приспособление для внесения удобрений, состоящее из дозирующего транспортера, подающего вносимые удобрения к распределяющим органам, и его привода, управляющий механизм которого связан с автоматической системой контроля и корректировки дозирования удобрений, имеющей блок электронных карт поля, микропроцессорное устройство и средство позиционирования на электронной карте поля приспособления для внесения удобрений, содержащее два измерительных блока: радиолокационный и навигационный, соединенные соответственно с вычислительным блоком и микропроцессорным устройством. Выходы последних через согласующее звено связаны с бортовым компьютером, первый выход которого соединен с первым входом блока сравнения, чей второй вход связан с блоком электронных карт поля, а выход соединен с управляющим механизмом привода дозирующего транспортера. Навигационный блок связан с инерциальными датчиками, размещенными на гиростабилизированной платформе, установленной на транспортном средстве, оснащенном также приемно-передающей антенной для связи с радиолокационным блоком. На транспортном средстве установлены датчик пройденного транспортным средством пути и датчик его поперечного перемещения. Эти датчики и блок электронных карт поля подключены к бортовому компьютеру, второй выход которого соединен с монитором, размещенным в кабине транспортного средства. Изобретение обеспечивает расширение арсенала технических средств, предназначенных для дифференцированного внесения удобрений в почву полей, при повышении качества распределения вносимой массы удобрений и степени выравнивания пестроты плодородия почвы по площади обрабатываемого поля путем повышения точности позиционирования приспособления для внесения удобрений на этом поле. 2 з.п. ф-лы, 1 ил.
| УСТАНОВКИ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ОРГАНИЧЕСКИХ УДОБРЕНИЙ | 2000 |
|
RU2189129C2 |
| МАЛАКОВ Ю.Ф | |||
| Устройство контроля и корректировки дозирования удобрений | |||
| Тракторы и сельскохозяйственные машины, 2000 г., №12, с.32 и 33 | |||
| Устройство управления дозатором разбрасывателя органических удобрений | 1989 |
|
SU1662394A1 |
| Устройство контроля качества внесения удобрений центробежным разбрасывателем | 1986 |
|
SU1423028A1 |
| СОСТАВ ДЛЯ ПРИГОТОВЛЕНИЯ ЖЕЛЕЙНОГО МАРМЕЛАДА | 1994 |
|
RU2080082C1 |

