Изобретение относится к электрическим машинам, а именно к способам определения в них потерь, в частности в асинхронном конденсаторном электродвигателе.
Известен способ определения механических потерь в асинхронном конденсаторном электродвигателе методом ненагруженного электродвигателя [1], согласно которому производится снятие зависимости разности между потребляемой мощностью и основными потерями в целях рабочих обмоток при понижении напряжения питания. Экстраполяция нижней прямолинейной части зависимости от квадрата напряжения питания отсекает на оси ординат механические потери. Однако этот способ является трудоемким.
Известен также способ определения механических потерь в асинхронном конденсаторном электродвигателе методом самоторможения [1], согласно которому электродвигатель подвергается свободному выбегу, а механические потери Рмех пропорциональны произведению номинальной частоты вращения nH на отрицательное ускорение, определяемое производной частоты вращения от времени  Однако этот способ является неточным.
Однако этот способ является неточным.
После отключения напряжения питания ротор электродвигателя обладает остаточным магнитным потоком, определяемым величиной намагничивающего тока до отключения и коэрцитивной силой материала ротора (электротехническая сталь). Величина остаточного магнитного потока может быть определена по измерению остаточной ЭДС в главной или вспомогательной фазах обмотки путем вращения электродвигателя с номинальной частотой другим электродвигателем.
Под действием остаточной ЭДС по цепи, включающей главную фазу обмотки, вспомогательную фазу и рабочий конденсатор, протекает ток, от взаимодействия которого с остаточным магнитным потоком создается тормозной генераторный момент, величина которого при номинальной частоте вращения соизмерима с моментом механических потерь, что приводит к завышению действительных механических потерь. Величина тормозного генераторного момента максимальна в первый момент после отключения, затем она значительно уменьшается в результате саморазмагничивания ротора протекающим по обмоткам током.
Целью предлагаемого изобретения является повышение точности определения механических потерь.
Поставленная цель достигается тем, что при определении механических потерь исключают тормозной генераторный момент, для чего вначале обесточивают вспомогательную фазу обмотки, затем отключают напряжение питания и производят самоторможение электродвигателя, при котором снижается зависимость частоты вращения от времени n=f(t), по которой определяют при номинальной частоте вращения nн производную  после чего вычисляют механические потери Рмех по формуле
после чего вычисляют механические потери Рмех по формуле
где С - постоянная самоторможения.
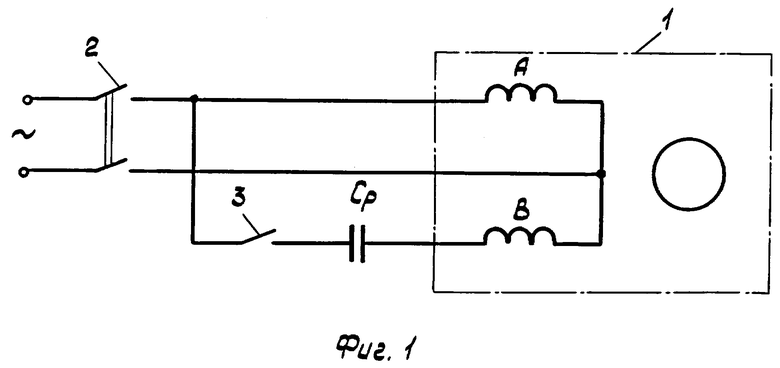
На фиг.1 представлена предлагаемая электрическая схема для проведения самоторможения асинхронного конденсаторного электродвигателя, где обозначено: 1 - асинхронный конденсаторный электродвигатель с главной А и вспомогательной В фазами обмотки, 2 - выключатель напряжения питания, 3 - выключатель для обесточивания вспомогательной фазы обмотки, Ср - рабочий конденсатор.
Определение механических потерь производится следующим образом. На электродвигатель 1 подается напряжение питания путем замыкания выключателя 2, при этом выключатель 3 замкнут. После достижения электродвигателем установившейся частоты вращения на холостом ходу обесточивается вспомогательная фаза обмотки путем размыкания выключателя 3. Электродвигатель продолжает работать на холостом ходу при питании только одной главной фазы обмотки. После достижения установившейся частоты вращения выключатель 2 размыкается и электродвигатель подвергается самоторможению. При этом снимается кривая выбега, по которой определяется при номинальной частоте вращения nн производная  а механические потери Рмех вычисляются по формуле (1).
а механические потери Рмех вычисляются по формуле (1).
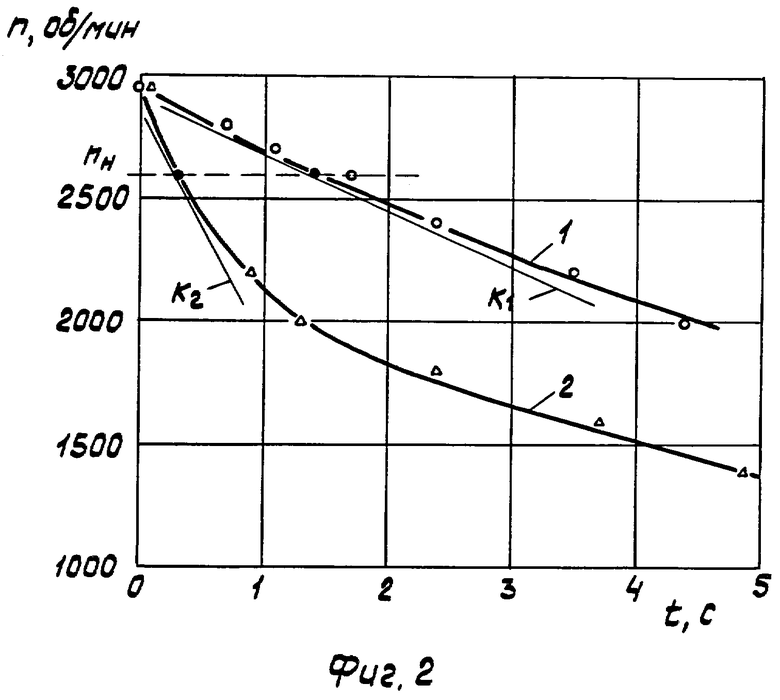
На фиг.2 приведены зависимости частоты вращения n от времени t при самоторможении асинхронного конденсаторного электродвигателя ДАК 116-120-3 мощностью на валу 120 Вт и номинальной частотой вращения 2600 об/мин: 1 - с предварительным обесточиванием вспомогательной фазы обмотки, 2 - без предварительного обесточивания. При этом остаточная ЭДС в главной фазе обмотки для кривой 1 составила 2,71 В, для кривой 2 - 0,23 В, что свидетельствует о саморазмагничивании ротора при самоторможении без предварительного обесточивания вспомогательной фазы обмотки. На фиг.2 видно, что производная  определяемая тангенсом угла наклона касательной к оси абсцисс в точке номинальной частоты вращения, для кривой 1 (касательная К1) меньше, чем для кривой 2 (касательная К2). Поэтому механические потери, определенные по кривой 2, будут завышены по сравнению с действительными, так как при этом включают в себя и дополнительные потери от тормозного генераторного момента, который отсутствует при номинальном режиме работы электродвигателя.
определяемая тангенсом угла наклона касательной к оси абсцисс в точке номинальной частоты вращения, для кривой 1 (касательная К1) меньше, чем для кривой 2 (касательная К2). Поэтому механические потери, определенные по кривой 2, будут завышены по сравнению с действительными, так как при этом включают в себя и дополнительные потери от тормозного генераторного момента, который отсутствует при номинальном режиме работы электродвигателя.
Источники информации
1. ГОСТ 25941-83. Машины вращающиеся электрические. Методы определения потерь и коэффициента полезного действия.
Изобретение относится к области электротехники, а именно, к определению потерь в асинхронном конденсаторном электродвигателе. Технический результат изобретения, заключающийся в увеличении точности измерения механических потерь в асинхронном конденсаторном электродвигателе, достигается путем того, что в способе определения механических потерь Рмех в асинхронном конденсаторном электродвигателе путем определения отрицательного ускорения -  в режиме самоторможения при номинальной частоте вращения nн и вычисления по формуле
в режиме самоторможения при номинальной частоте вращения nн и вычисления по формуле  , где С - постоянная самоторможения, при измерении исключают тормозной генераторный момент, для чего вначале обесточивают вспомогательную фазу обмотки, затем отключают напряжение питания и производят самоторможение электродвигателя. 2 ил.
, где С - постоянная самоторможения, при измерении исключают тормозной генераторный момент, для чего вначале обесточивают вспомогательную фазу обмотки, затем отключают напряжение питания и производят самоторможение электродвигателя. 2 ил.
Способ определения механических потерь Рмех в асинхронном конденсаторном электродвигателе путем определения отрицательного ускорения -  в режиме самоторможения при номинальной частоте вращения nн и вычисления по формуле
в режиме самоторможения при номинальной частоте вращения nн и вычисления по формуле
 ,
,
где С - постоянная самоторможения,
отличающийся тем, что при измерении исключают тормозной генераторный момент, для чего вначале обесточивают вспомогательную фазу обмотки, затем отключают напряжение питания и производят самоторможение электродвигателя.
| СПОСОБ ДЛЯ КОНТРОЛЬНОГО ИСПЫТАНИЯ ОТКЛЮЧАЮЩЕГО МОМЕНТА ВРАЩЕНИЯ ИСПОЛНИТЕЛЬНОГО ПРИВОДА | 1990 |
|
RU2095819C1 |
| Устройство для измерения абсолютного скольжения асинхронной машины | 1979 |
|
SU866476A1 |
| Способ контроля перехода турбогенератора в асинхронный режим | 1988 |
|
SU1638683A1 |
| US 5691583 А, 25.11.1997 | |||
| DE 10020940 A, 15.11.2001. | |||

