(54) СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ПОТЕРЬ, В ГИСТЕРЕЗИСНОМ ЭЛЕКТРОДВИГАТЕЛЕ 1 t::::: : :r:;r::: .Изобретение относится к электрическим машинам, а имен|нр к cffc3epbjiM; определения потерь в эJ1eктpичecкиx машинах, в частности вгистерезиЬном-электродвигателе. Известен способ опрёделёнйя мёханических потерь путеТй режиме ненагружённого yfeiKT &ffSUTfS.теля, согласно которому производится снятие зависимости .потребляемой мрщности и тока от напряжения питания. Механические потери ortpejrenireJt c5l3 Trr 5 экстраполяции на нуль зависимости разности потребляемой мощности и основных потерь в обмотке от квадрата напряжения питания f. Однако этот способ является трудо емким. . „j,,. „ Известен также способ измерения механических потерь в гистерезисном электродвигателе путем разгона его до номинальной скорости с последующим самоторможением на:холостом . ходу при отключений от источника питания в течение фиксир ЭаШчэ ЪтЕгремени . ut fXl. - Однако при отключение гистерезис электродвигателя ртг источника. питания его ротор сохрЖНЖёт Шзтатрч ную намагниченность, в связи с чемна ротор действует не только ме:| анйческий тормозной момент, но и тормозной момент, :вызванный: потерями в стали статора от остаточного потока ротора, в результате уменьшается ТЬчноет 6прёд0лениЯ иёханических потерь. Целью изобретения является повышение точности. Для реализации поставленной цели производят дополнительный цикл раэ,гона и самоторможения при напряжении питания, отличном от напряжения при первом разгоне, при этом в каждом цикле замёря от ЗДС Е в обмотке статбрйв Иомёнтотключения ее от источника питания и изменение ЭДС д& за время отключения, а механические потери определяют цо формуле -(ii.f , Ei&i.2 -И lEj где с - постоянная двигателя при самоторможении; n - номинальная скорость, индексы 1 и 2 относятся соответственно к первому и второму циклам. Самоторможение электродвигателя происходит за счет суммы механическ потерь и потерь в стали от остаточного магнитного потока ротора P-.VPCT7 2) где Р - сумма потерь j , потери в стали от остаточно го магнитного потока ротора Потери в стали от остаточного магни ;ного. потока ротора пропорциональны квадрату этого потока, и, следовательно, пропорциональны квадрату наводимой им ЭДС в обмотке электродвигателяРСТ-ХЕ, (3) где к - коэффициент пропорционально ти. Суммарный тормозной момент связа с изменением скорости следующей зависимостью .1 Р М гп it Уменьшение частоты вращения пропорционально уменьшению ЭДС в обмот электродвигателя-, наводимой остаточ ным магнитным tioTOKOM ротора ДП П -gТак как величина оста.точного маг Нйтного потока ротора определяете) вел йчиной напряжения, при котором р ботает электродвигатель в процессе разгона, то для двух самоторможений отличающихся величиной напряжения, пШе1ри 115т;алйбт остаточного магни ного потока ротора различны, тогда kai механические потери остаются п стоянными. Поэтому для двух самото можений справедливы два уравнения Р2 Рм Рст2Учитывая формулы(3) - (5 )уравненйя (6) имеют вид
с.Р.-В .,
п i 1 . Решая два уравнения(7)с двумя неизвестными 5fi К получают формулу (1) для определения механических потерь
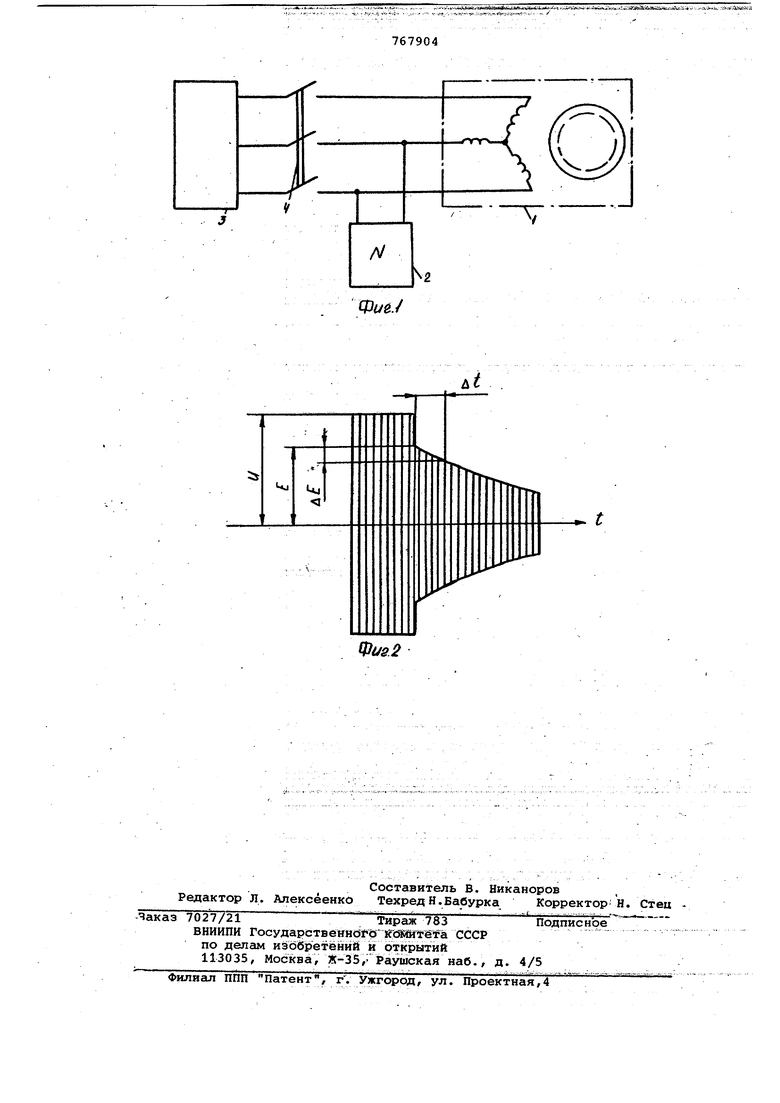
На фиг. 1. представлена электрическая схема для определения механи-: ческих потерь по прёдяагаёмому способу; на фиг. 2 - осциллограмма самоторможения электродвигателя, где и - напряжение питания электродвигателя.
Схема содержит электродвигатель 1, осциллограф 2, источник 3 питания , выключатель 4.
(i
АЕ
4Ен
Е гйЦиа/
-fef
где с - постоянная двигателя при самоторможении;.
л - номинальная скорость; индексы 1 и 2 относятся соответственно к первому и второму циклам.
Источники информации, принятые во внимание при экспертизе
1.ГОСТ 11828-66 Машины электрические. Методы испытаний.
2.ГОСТ 10169-62 Машины электрические синхронные. Йётоды испытаний,. ; Определе1 ие механических потерь производят следующим образом. Включаю электродвигатель 1 на холостом ходу. После достижения электродвигателем 1 номинальной частоты вращения -отключают его и с помощью осциллографа 2 измеряют ЭДС в обмотке электродвигателя 1-Е,наводимую остаточным магнитным потоком ротора электродвигателя 1, и время At , в течение которого Эта ЭДС уменьшается на дЕ но .не более, чем на 10%. Далее изменяют величину напряжения источника 3 питания и повторяют указанные операции, измеряя величины At2H дЕ.Механические потери вычисляют по формуле (1), подставляя в нее измеренные величины Е:,, Ej, ДЕ;,, д ЕЗ , at, Atj и из-, вестные величины си п. В предлагаемом способе определения механических потерь не требуется размагничивания ротора и доступа к его валу, а также наличия постороннего двигателя, что упрощает определение механических потерь. Формула изобретения Способ измерения механических потерь в гистерезисном электродвигателе путем разгона его дономинальной скорости с последующим самоторможением на холостом ходу При отключении от источника питания в течение фиксированного времени дЧ , о т л ичающийся тем, что, с целью Повышения точности путем исключения тормозной составляющей, связанной с потерями в стали статора при самоторможении, производят дополнительный цикл разгона и самоторможения при напряжении питания, отличном от напряжения при первомразгоне, при этом в каждом цикле замеряют ЭДС Е в обмотке статора в момент отключения ее от источника питания и изменение ЭДС дЕ за время отключения, а механические потери определяют по формуле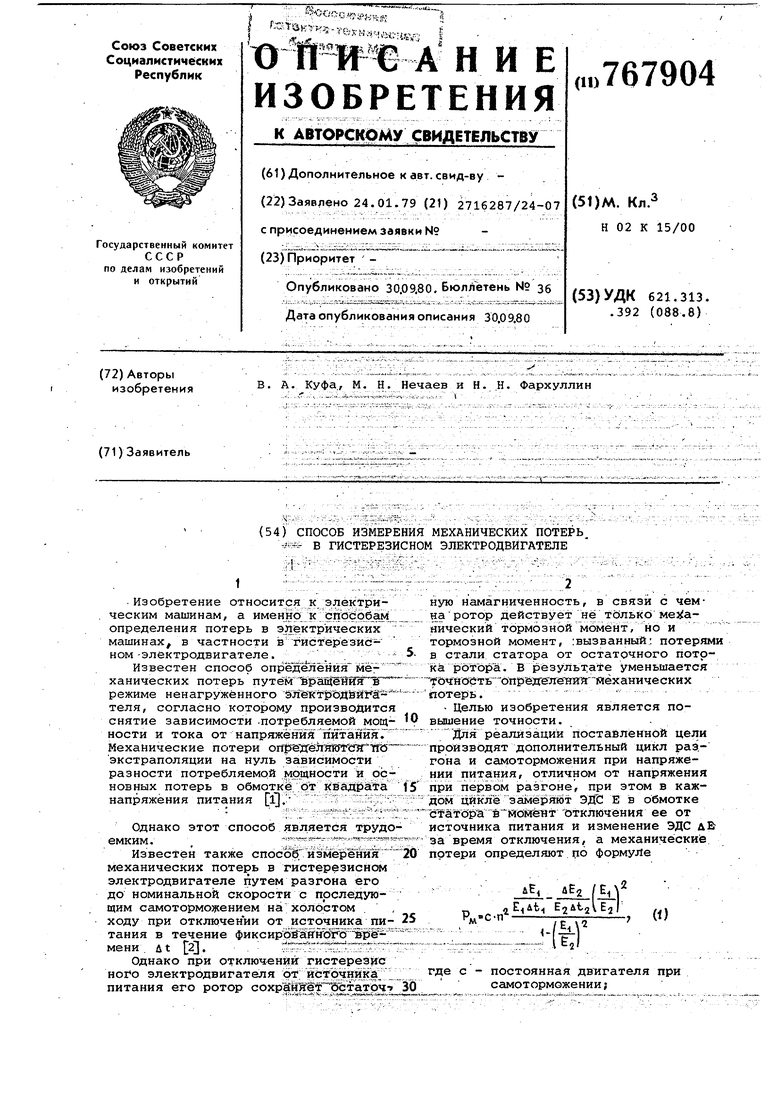
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля опор электродвигателя | 1989 |
|
SU1677560A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ПОТЕРЬ АСИНХРОННОГО КОНДЕНСАТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2231894C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАБОТЫ АСИНХРОННОЙ КОРОТКОЗАМКНУТОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И АСИНХРОННАЯ КОРОТКОЗАМКНУТАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2393613C1 |
| СПОСОБ ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ РЕАКЦИЕЙ ЯКОРЯ | 2011 |
|
RU2465713C2 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| Способ управления гистерезисным электродвигателем | 1988 |
|
SU1543528A1 |
| Способ управления гистерезисным электродвигателем | 1975 |
|
SU657557A1 |
| Способ контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1203444A1 |
| ГИСТЕРЕЗИСНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1973 |
|
SU393797A1 |