Предлагаемое изобретение относится к области управляемых снарядов, а именно к гирокоординаторам головок самонаведения, используемым в системах управления управляемых артиллерийских снарядов (УАС).
Известен гирокоординатор (ГК) головки самонаведения артиллерийского управляемого снаряда "Copperhead" [1], содержащий корпус, ротор, на передней торцевой поверхности которого выполнено зеркало, ориентированный по продольной оси снаряда, установленный во внутреннем кардановом подвесе, размещенном в основании, пружинный двигатель, помещенный в корпусе ГК. Наружный конец пружины жестко соединен с корпусом, а внутренний - разъемно с втулкой, установленной на оси ротора, размещенной во внутренней полости карданова подвеса. С целью исключения воздействия на опоры и рамки карданова подвеса инерционной нагрузки ротора в гирокоординаторе используется специальная втулка "Gotcha", размещенная между ротором и корпусом и выполненная в виде подвижного в осевом направлении разрезного кольца с выступами, контактирующими с проточкой, выполненной в теле ротора. Втулка обеспечивает передачу инерционной нагрузки ротора, действующей в момент выстрела, на корпус прибора, минуя опоры и рамки карданова подвеса. Приводится ГК в действие пиропатроном.
Недостатком конструкции прибора является невозможность ее применения при использовании других схем построения гирокоординатора, например, когда оптическая система и приемник излучения размещаются во внутренней рамке карданова подвеса, так как этому препятствует ось ротора, размещенная во внутренней полости карданова подвеса.
Наиболее близким к предлагаемому техническому решению является гирокоординатор головки самонаведения [2], содержащий корпус, ротор, размещенный на внутреннем кардановом подвесе, основание карданова подвеса, установленное в корпусе, пружинный двигатель, размещенный в корпусе и соединенный разъемно с ротором, пиротехнический элемент. Для повышения ударной прочности ротор установлен с возможностью контактирования задней торцевой поверхностью с опорной поверхностью корпуса, основание установлено в корпусе с возможностью продольного перемещения и поворота дополнительно введенным упругим элементом сжатия-кручения. На заднем торце основания закреплена втулка с выступом и пазом, взаимодействующим со ступенью большего диаметра двухступенчатого цилиндрического подпружиненного фиксатора, установленного параллельно продольной оси во фланце, закрепленном на задней стенке корпуса. В качестве исполнительного элемента используется пиротехнический элемент, установленный во фланце и контактирующий со ступенью меньшего диаметра фиксатора. Для ограничения угла поворота основания во фланце выполнена поверхность, взаимодействующая с выступом втулки. Удержание ротора от вращения обеспечивается за счет контактирования паза, выполненного на задней торцевой поверхности ротора, с упором, установленным на опорной поверхности корпуса. Величина перекрытия в осевом направлении большего диаметра фиксатора с пазом втулки меньше рабочего хода пиротехнического элемента, величина продольного перемещения основания больше глубины вхождения упора в паз ротора, а направление перемещения фиксатора под действием усилия пиротехнического элемента совпадает с направлением ускорения при выстреле.
Недостатком конструкции прибора является низкая ударная прочность при действии обратного ускорения, возникающего при выходе снаряда из канала ствола при выстреле вследствие податливости конструкции его корпуса.
Задачей предлагаемого изобретения является повышение ударной прочности гирокоординатора головки самонаведения УАС, оптическая система которого и приемник излучения размещены во внутренней рамке карданова подвеса, путем разгрузки опор и рамок карданова подвеса от инерционной нагрузки ротора, возникающей при действии обратного ускорения.
Указанная задача достигается тем, что в гирокоординаторе головки самонаведения артиллерийского управляемого снаряда, содержащем корпус, ротор, установленный по продольной оси снаряда с возможностью контактирования задней торцевой поверхностью с опорной поверхностью корпуса и размещенный на внутреннем кардановом подвесе, установленном в подвижном подпружиненном в осевом направлении основании, пружинный двигатель, размещенный в корпусе и соединенный разъемно с ротором, пиротехнический элемент, соединение пружинного двигателя с ротором осуществляется двухступенчатой цилиндрической втулкой, установленной с возможностью вращения на корпусе во внутренней полости пружинного двигателя, на ступени меньшего диаметра которой выполнен зацеп, взаимодействующий с пазом на внутреннем конце пружинного двигателя, а на передней торцевой поверхности ступени большего диаметра выполнены выступы, на наружной цилиндрической поверхности которых выполнены пазы, открытые в направлении вращения и имеющие стенку с противоположной стороны, поверхность выступа, противолежащая открытой стороне паза, на расстоянии от оси вращения, большем радиуса внутренней стенки паза, выполнена наклонной в сторону, противоположную направлению вращения, на задней торцевой поверхности ротора размещены радиально направленные поводки, входящие в пазы втулки, на поверхности основания карданова подвеса, выступающей за заднюю стенку корпуса, выполнена проточка, контактирующая с ограничителем цилиндрического сечения, закрепленным на упругом элементе с регулируемым усилием поджатия, установленным на корпусе, при этом расстояние от оси карданова подвеса до наиболее удаленной части наклонной плоскости больше, чем до плоскости вращения поводков, на задней торцевой поверхности ротора выполнен радиальный паз, с которым взаимодействует выступ Г-образного цилиндрического фиксатора, установленного в корпусе параллельно оси вращения ротора, на боковой поверхности которого выполнен паз, с которым контактирует стопор, размещенный в проточке подвижной в осевом направлении подпружиненной втулки, взаимодействующей с пиротехническим элементом, при этом ось втулки расположена в плоскости, перпендикулярной оси ротора, а величина перемещения втулки больше глубины паза.
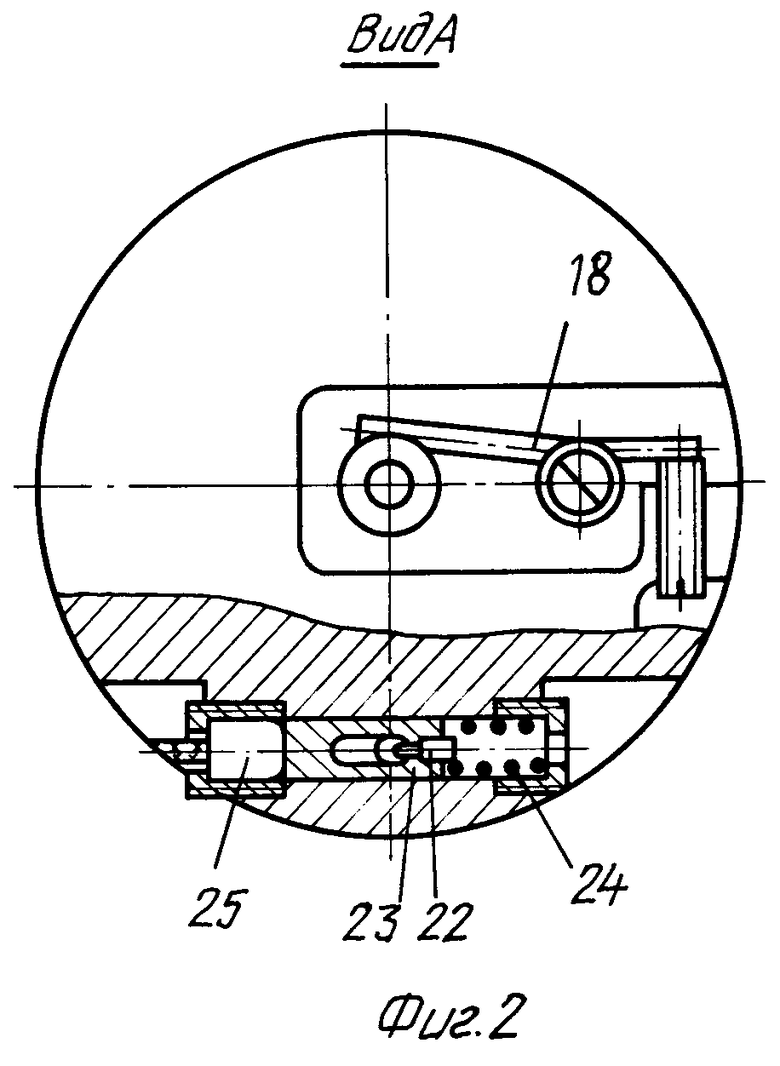
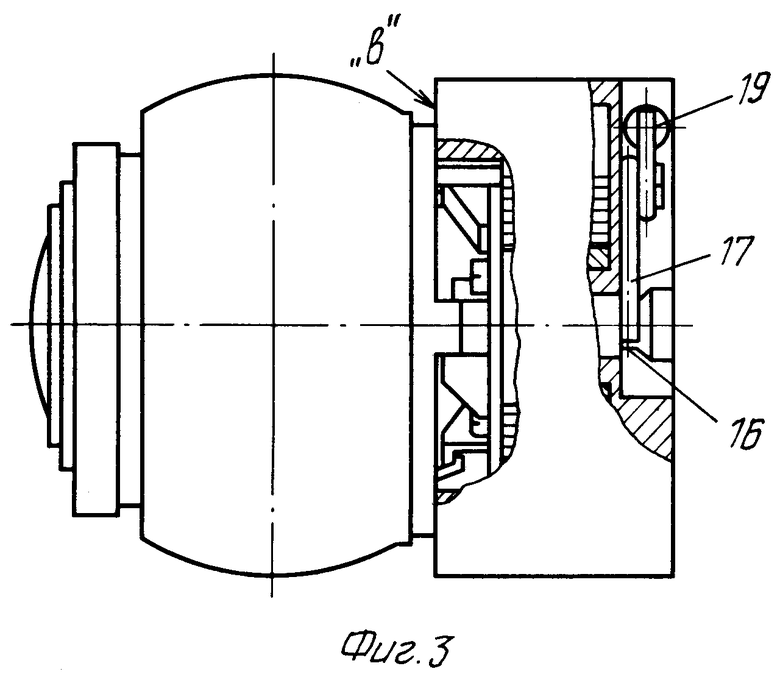
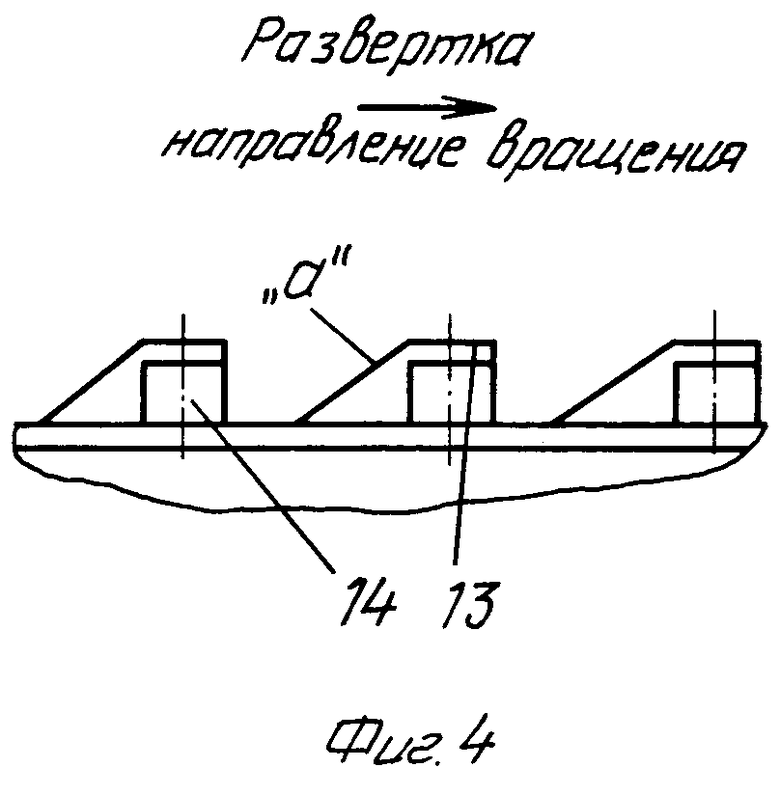
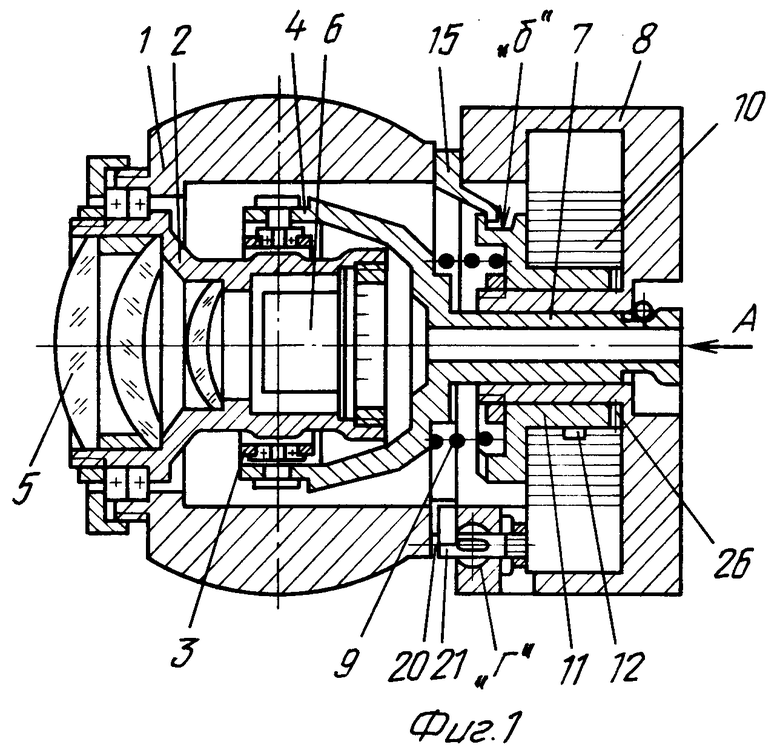
На фиг.1-3 изображен общий вид описываемого устройства, на фиг.4 развертка втулки.
Ротор 1 в кардановом подвесе, состоящем из внутренней 2 и наружной 3 рамок, установлен в основании 4. Во внутренней рамке размещены оптическая система 5 и приемник излучения 6. Основание 4 своим хвостовиком 7 установлено в корпусе 8 с возможностью продольного перемещения под действием усилия упругого элемента 9. В расточке корпуса 8 размещен пружинный двигатель 10, наружный конец которого жестко закреплен на корпусе, а на внутреннем конце выполнен паз. Во внутренней полости пружинного двигателя 10 размещена с возможностью вращения вокруг продольной оси двухступенчатая цилиндрическая втулка 11, обеспечивающая передачу крутящего момента от пружинного двигателя 10 к ротору 1. Для этого на ступени меньшего диаметра выполнен зацеп 12, контактирующий с пазом на внутреннем конце пружинного двигателя 10, а на передней торцевой поверхности ступени большего диаметра выполнены выступы 13. На наружной цилиндрической поверхности выступов выполнены пазы 14, открытые в направлении вращения ротора, а сторона "а" выступов, противолежащая открытой стороне паза 14, на расстоянии от оси вращения, равном или большем радиуса внутренней стенки "б" паза 14, выполнена наклонной в сторону, противоположную направлению вращения, т.е. в виде наклонной плоскости, расстояние до которой от переднего торца выступа увеличивается в направлении, противоположном направлению вращения. В пазы 14 выступов 13 входят радиально направленные поводки 15, закрепленные на задней торцевой поверхности ротора 1. Для обеспечения удержания ротора около опорной поверхности "в" корпуса 8 в процессе заводки пружинного двигателя служит проточка 16, выполненная на цилиндрической части хвостовика 7 основания 4, выступающей за заднюю стенку корпуса 8, для чего в нее входит ограничитель 17 цилиндрического сечения, выполненный, например, в виде пружины кручения 18 с регулируемым винтом 19 усилием поджатия.
Удержание ротора 1 от вращения в заарретированном положении осуществляется за счет взаимодействия радиального паза 20, выполненного на задней торцевой поверхности ротора, с выступом Г-образного фиксатора 21, размещенного в корпусе 8 параллельно оси вращения ротора. На боковой цилиндрической поверхности фиксатора выполнен паз "г", в который входит стопор 22, размещенный в проточке подвижной в осевом направлении втулки 23, подпружиненной упругим элементом 24. Для разарретирования ГК используется пиротехнический элемент 25, прикладывающий усилие к втулке 23. Поджатие ротора к опорной поверхности корпуса 8 осуществляется за счет установки шайб 26.
Работает гирокоординатор следующим образом. При выстреле ГК заарретирован и ротор за счет взаимодействия поводков с пазами поджат к опорной поверхности корпуса, что обеспечивает разгрузку опор и рамок карданова подвеса от инерционной нагрузки, создаваемой ротором при действии ускорения в процессе выстрела (прямой перегрузки). При выходе снаряда из канала ствола на его элементы воздействует ускорение обратного знака (обратная перегрузка), обусловленная принятием корпусом снаряда первоначальной формы после его сжатия в канале ствола при выстреле. При этом инерционная нагрузка ротора за счет контактирования поводков с пазами на выступах втулок оказывается приложенной к корпусу, минуя рамки и опоры карданова подвеса, что обеспечивает их разгрузку.
Запуск гирокоординатора осуществляется на конечном участке траектории после захвата цели головкой самонаведения путем подачи напряжения на пиротехнический элемент. Срабатывая, он перемещает втулку 23, в результате чего стопор 22 выходит из паза фиксатора 21, обеспечивая свободу вращения. Ротор 1 под действием момента пружинного двигателя 10, передаваемого через втулку 11 и поводки 15, начинает разгоняться. После окончания разгона, когда момент двигателя станет равным нулю, поводки ротора, вращаясь по инерции, выходят из пазов 14 и, взаимодействуя с наклонной плоскостью "а", преодолевают усилие зацепления ограничителя 17 с проточкой 16 и перемещают ротор 1 от опорной поверхности корпуса 8, обеспечивая его прокачку.
Удержание ротора около опорной поверхности корпуса, осуществляемое подпружиненным ограничителем 17, взаимодействующим с проточкой 16, обеспечивает уменьшение момента трения между поводками 15 и пазами 14 втулки 11 при выходе ротора из пазов и удобство заводки пружинного двигателя за счет того, что усилие взаимодействия ограничителя с проточкой больше усилия, развиваемого упругим элементом 9. Выполнение расстояния от оси карданова подвеса до наиболее удаленной от переднего торца втулки части наклонной большим, чем до плоскости вращения поводков, обеспечивает контактирование поводков с наклонной плоскостью и приложение в результате этого к ротору усилия, обеспечивающего его перемещение от опорной плоскости.
Проведенные испытания предложенной конструкции гирокоординатора показали, что он выдерживает воздействие прямого одиночного удара с перегрузкой до 11000 единиц и обратного удара с перегрузкой до 2000 единиц без изменения точностных характеристик.
Источники информации
1. "Electronic packaging and production", 1980 г., volume 20, number 5, стр. 68-86 (рис.11).
2. Патент РФ, F 42 В 15/01, №2177600 от 27.12.2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2010 |
|
RU2442103C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2000 |
|
RU2177600C1 |
| Гирокоординатор головки самонаведения | 2016 |
|
RU2621218C1 |
| Гирокоординатор головки самонаведения | 2018 |
|
RU2678514C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2010 |
|
RU2421686C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1999 |
|
RU2180728C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2010 |
|
RU2416069C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
Изобретение относится к области управляемых снарядов, а именно к гирокоординаторам головок самонаведения, используемых в системах управления артиллерийских управляемых снарядов. Сущность изобретения заключается в том, что в гирокоординаторе головки самонаведения артиллерийского управляемого снаряда соединение пружинного двигателя с ротором осуществляется двухступенчатой цилиндрической втулкой, установленной с возможностью вращения на корпусе во внутренней полости пружинного двигателя, на ступени меньшего диаметра которой выполнен зацеп, взаимодействующий с пазом на внутреннем конце пружинного двигателя. На задней торцевой поверхности ротора размещены радиально направленные поводки, входящие в пазы втулки. На поверхности основания карданова подвеса выполнена проточка, а на задней торцевой поверхности ротора - радиальный паз, с которым взаимодействует выступ Г-образного цилиндрического фиксатора. Технический результат изобретения состоит в повышении ударной прочности гирокоординатора головки самонаведения управляемого артиллерийского снаряда. 4 ил.
Гирокоординатор головки самонаведения артиллерийского управляемого снаряда, содержащий корпус, ротор, установленный по продольной оси снаряда с возможностью контактирования задней торцевой поверхности с опорной поверхностью корпуса и размещенный на внутреннем кардановом подвесе, установленном в подвижном подпружиненном в осевом направлении основании, пружинный двигатель, размещенный в корпусе и соединенный разъемно с ротором, пиротехнический элемент, отличающийся тем, что соединение пружинного двигателя с ротором осуществляется двухступенчатой цилиндрической втулкой, установленной с возможностью вращения на корпусе во внутренней полости пружинного двигателя, на ступени меньшего диаметра которой выполнен зацеп, взаимодействующий с пазом на внутреннем конце пружинного двигателя, а на передней торцевой поверхности ступени большего диаметра выполнены выступы, на наружной цилиндрической поверхности которых выполнены пазы, открытые в направлении вращения и имеющие стенку с противоположной стороны, поверхность выступа, противолежащая открытой стороне паза, на расстоянии от оси вращения, большем радиуса внутренней стенки паза, выполнена наклонной в сторону, противоположную направлению вращения, на задней торцевой поверхности ротора размещены радиально направленные поводки, входящие в пазы втулки, на поверхности основания карданова подвеса, выступающей за заднюю стенку корпуса, выполнена проточка, контактирующая с ограничителем цилиндрического сечения, закрепленным на упругом элементе с регулируемым усилием поджатия, установленным на корпусе, при этом расстояние от оси карданова подвеса до наиболее удаленной части наклонной плоскости больше, чем до плоскости вращения поводков, на задней торцевой поверхности ротора выполнен радиальный паз, с которым взаимодействует выступ Г-образного цилиндрического фиксатора, установленного в корпусе параллельно оси вращения ротора, на боковой поверхности которого выполнен паз, с которым контактирует стопор, размещенный в проточке подвижной в осевом направлении подпружиненной втулки, взаимодействующей с пиротехническим элементом, при этом ось втулки расположена в плоскости, перпендикулярной оси ротора, а величина перемещения втулки больше глубины паза.
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2000 |
|
RU2177600C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| US 3452608, 01.07.1969 | |||
| СПОСОБ РАЗМЕТКИ ОТВЕРСТИЙ НА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2354537C2 |
| УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ И СПОСОБ УПРАВЛЕНИЯ СОВОКУПНОСТЬЮ | 2018 |
|
RU2751040C2 |
| 1970 |
|
SU411899A1 | |
