Изобретение относится к области управляемых снарядов, а именно к гирокоординаторам головок самонаведения, используемых в системах управления артиллерийских управляемых снарядов и управляемых ракет.
Известен гирокоординатор (ГК) головки самонаведения артиллерийского управляемого снаряда "Copperhead" ("Elektronic packageing and production", 1980 г., volume 20, number 5, стр.68-86 (рис.11)), содержащий корпус, ротор, на передней торцевой поверхности которого выполнено зеркало, ориентированный по продольной оси снаряда, установленный во внутреннем кардановом подвесе, размещенном в основании, пружинный двигатель, помещенный в корпусе ГК. Наружный конец пружины жестко соединен с корпусом, а внутренний - разъемно с втулкой, установленной на оси ротора, размещенной во внутренней полости карданова подвеса. С целью исключения воздействия на опоры и рамки карданова подвеса инерционной нагрузки ротора в гирокоординаторе используется специальная втулка "Gotcha", размещенная между ротором и корпусом и выполненная в виде подвижного в осевом направлении разрезного кольца с выступами, контактирующими с проточкой, выполненной в теле ротора. Втулка обеспечивает передачу инерционной нагрузки ротора, действующей в момент выстрела, на корпус прибора, минуя опоры и рамки карданова подвеса. Приводится ГК в действие пиропатроном.
Недостатком конструкции прибора является невозможность ее применения при использовании других схем построения гирокоординатора, например, когда оптическая система и приемник излучения размещаются во внутренней рамке карданова подвеса, так как этому препятствует ось ротора, размещенная во внутренней полости карданова подвеса.
Наиболее близким к предлагаемому техническому решению является гирокоординатор головки самонаведения (патент №2234049, кл. F42B 15/01 от 19.02.2003 г.), содержащий корпус, ротор, установленный по продольной оси снаряда с возможностью контактирования задней торцевой поверхностью с опорной поверхностью корпуса и размещенный на внутреннем кардановом подвесе, установленном в подвижном подпружиненном в осевом направлении основании. Пружинный двигатель размещен в корпусе и разъемно соединен с ротором. Соединение пружинного двигателя с ротором осуществляется двухступенчатой цилиндрической втулкой, установленной с возможностью вращения на корпусе во внутренней полости пружинного двигателя, на ступени меньшего диаметра которой выполнен зацеп, взаимодействующий с пазом на внутреннем конце пружинного двигателя, а на передней торцевой поверхности ступени большего диаметра выполнены выступы, на наружной цилиндрической поверхности которых выполнены пазы, открытые в направлении вращения и имеющие стенку с противоположной стороны. Поверхность выступа, противолежащая открытой стороне паза, на расстоянии от оси вращения большем радиуса внутренней стенки паза, выполнена наклонной в сторону, противоположную направлению вращения, на задней торцевой поверхности ротора размещены радиально направленные поводки, входящие в пазы втулки. На поверхности основания карданова подвеса, выступающей за заднюю стенку корпуса, выполнена проточка, контактирующая с ограничителем цилиндрического сечения, закрепленным на упругом элементе с регулируемым усилием поджатия, установленным на корпусе. Расстояние от оси карданова подвеса до наиболее удаленной части наклонной плоскости больше, чем до плоскости вращения поводков, на задней торцевой поверхности ротора выполнен радиальный паз, с которым взаимодействует выступ Г-образного цилиндрического фиксатора, установленного в корпусе параллельно оси вращения ротора, на боковой поверхности которого выполнен паз, с которым контактирует стопор, размещенный в проточке подвижной в осевом направлении подпружиненной втулки, взаимодействующей с пиротехническим элементом, при этом ось втулки расположена в плоскости, перпендикулярной оси ротора, а величина перемещения втулки больше глубины паза.
Для обеспечения расцепления ротора со втулкой за короткое время, определяемое требованиями к времени готовности прибора, необходимо выполнение условия Мтр1>>Мтр2, где Мтр1 - момент трения между внутренним концом пружинного двигателя и зацепом втулки, Мтр2 - момент трения между поводками ротора и пазами втулки. Момент Мтр1 определяется радиусом внутреннего конца пружинного двигателя, а момент Мтр2 - коэффициентом трения, зависящим от чистоты контактирующих поверхностей, т.е. настройка соотношения между величинами моментов трения Мтр1, Мтр2 достаточно трудоемка.
Недостатком конструкции прибора является значительный разброс времени готовности, определяемого как сумма времен разгона и разарретирования ротора. Из-за нестабильной величины моментов трения между зацепом втулки и внутренним концом пружинного двигателя, а также между поводками и стенками паза время разарретирования, т.е. время расцепления ротора со втулкой, имеет довольно большой разброс. Задачей предлагаемого изобретения является обеспечение стабильной величины времени готовности гирокоординатора за счет стабилизации времени разарретирования ротора путем введения торможения, т.е. резкого увеличения момента трения, двухступенчатой цилиндрической втулки по окончании разгона ротора.
Указанная задача достигается тем, что в гирокоординаторе головки самонаведения артиллерийского управляемого снаряда, содержащем корпус, ротор на внутреннем кардановом подвесе, установленном в подвижном в осевом направлении основании, пружинный двигатель, разъемно соединенный с ротором двухступенчатой цилиндрической втулкой, установленной с возможностью вращения на корпусе во внутренней полости пружинного двигателя, с зацепом, выполненным на ступени меньшего диаметра, взаимодействующим с пазом на внутреннем конце пружинного двигателя и пазами на цилиндрической части выступов ступени большего диаметра, в которые входят радиально направленные поводки, размещенные на задней торцевой поверхности ротора, во внутренней полости ступени большего диаметра двухступенчатой цилиндрической втулки на корпусе установлена гайка с выступом, контактирующим с продольным пазом, выполненным на втулке, с возможностью продольного перемещения гайки величиной не менее N×S, где N - число рабочих оборотов пружинного двигателя, S - шаг резьбы, направление резьбы определяется направлением вращения ротора, а на торцевой части втулки, контактирующей с гайкой, закреплена резиновая прокладка.
На чертеже изображен общий вид описываемого устройства. Ротор 1 в кардановом подвесе, состоящем из внутренней 2 и наружной 3 рамок, установлен в основании 4, которое своим хвостовиком 5 установлено в корпусе 6 с возможностью перемещения в продольном направлении под действием упругого элемента 7. В расточке корпуса 6 размещен пружинный двигатель 8, осуществляющий разгон ротора 1 гирокоординатора до рабочих оборотов. Соединение ротора с пружинным двигателем выполнено посредством двухступенчатой цилиндрической втулки 9, обеспечивающей передачу крутящего момента и расстыковку пружинного двигателя 8 с ротором 1 после окончания его разгона. Для этого на ступени меньшего диаметра выполнен зацеп 10, контактирующий с пазом на внутреннем конце пружинного двигателя 8, а на передней торцевой поверхности ступени большего диаметра выполнены выступы 11, на наружной цилиндрической поверхности которых выполнены пазы 12, открытые в направлении вращения ротора, а сторона выступов, противолежащая открытой стороне паза 12, выполнена наклонной в сторону, противоположную направлению вращения, т.е. в виде наклонной плоскости, расстояние до которой от переднего торца выступа увеличивается в направлении, противоположном направлению вращения. В пазы 12 выступов 11 входят радиально направленные поводки 13, закрепленные на задней торцевой поверхности ротора 1. На внутренней цилиндрической поверхности ступени большего диаметра втулки 9 выполнен продольный паз 14, в который входит выступ 15 гайки 16, установленной на корпусе 6. Длина резьбовой части должна обеспечивать возможность перемещения гайки на величину не менее N×S, где N - число рабочих оборотов пружинного двигателя, S - шаг резьбы. Удержание ротора около опорной поверхности корпуса 6 в процессе заводки пружинного двигателя обеспечивает проточка 17, выполненная на цилиндрической части хвостовика 5 основания 4, выступающей за заднюю стенку корпуса 6, для чего в нее входит ограничитель 18 цилиндрического сечения, выполненный, например, в виде пружины кручения с регулируемым усилием поджатия.
Фиксация ротора 1 от вращения в заарретированном положении осуществляется за счет взаимодействия радиального паза 19, выполненного на задней торцевой поверхности ротора, с выступом Г-образного фиксатора 20, размещенного в корпусе 6 параллельно оси вращения ротора. Для разарретирования ГК используется пиротехнический элемент, прикладывающий усилие к втулке, удерживающей фиксатор от поворота.
Работает гирокоординатор следующим образом. Запуск гирокоординатора осуществляется на траектории после захвата цели головкой самонаведения путем подачи напряжения на пиротехнический элемент. Срабатывая, он перемещает втулку в результате чего освобождается фиксатор 20, обеспечивая свободу вращения ротору. Ротор 1 под действием момента пружинного двигателя 8, передаваемого через втулку 9 и поводки 13, начинает разгоняться. При этом вместе со втулкой 9 за счет взаимодействия выступа 15 с пазом 14 вращается гайка 16, которая вследствие взаимодействия в резьбовом соединении перемещается в продольном направлении. По окончании разгона, т.е. при повороте гайки на число оборотов, равное числу рабочих оборотов пружинного двигателя, она упирается в торцевую часть ступени большего диаметра втулки 9 и вследствие этого тормозится, а вместе с ней останавливается и втулка 9. Ротор вращается по инерции и поводки 13 выходят из пазов 12 и, взаимодействуя с наклонной плоскостью, обеспечивают приложение к ротору продольного усилия, превышающего усилие зацепления ограничителя 18 с проточкой 17, в результате чего ротор 1 перемещается от опорной поверхности корпуса 6, обеспечивая углы прокачки. Резиновая прокладка 21 позволяет исключить закусывание резьбы при резком торможении гайки 18.
Направление резьбы в зависимости от направления вращения ротора выбирается таким, чтобы при заводке пружинного двигателя гайка перемещалась от торцевой поверхности двухступенчатой втулки, где она должна быть расположена в исходном положении.
Поскольку время разгона и начальные обороты ротора определяются моментом и количеством рабочих оборотов пружинного двигателя, а время разарретирования - временем взаимодействия поводков с наклонной плоскостью выступов двухступенчатой втулки, определяемым угловой скоростью вращения ротора, то время готовности предложенного устройства определяется количеством оборотов заводки пружинного двигателя, которое контролируется и может регулироваться в процессе изготовления.
Проведенные испытания предложенной конструкции гирокоординатора показали, что она обеспечивает стабильность времени разгона при воздействии механических нагрузок и климатических факторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2003 |
|
RU2234049C1 |
| Гирокоординатор головки самонаведения | 2018 |
|
RU2678514C1 |
| Гирокоординатор головки самонаведения | 2016 |
|
RU2621218C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2000 |
|
RU2177600C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2010 |
|
RU2421686C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1999 |
|
RU2180728C2 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2010 |
|
RU2416069C1 |
Изобретение относится к области управляемых снарядов, а именно к гирокоординаторам головок самонаведения. Гирокоординатор содержит корпус, ротор и пружинный двигатель с зацепом. Ротор расположен на внутреннем кардановом подвесе, установленном в подвижном основании, в осевом направлении. Пружинный двигатель разъемно соединен с ротором двухступенчатой цилиндрической втулкой, установленной с возможностью вращения во внутренней полости двигателя. Зацеп выполнен на ступени меньшего диаметра. Зацеп взаимодействует с пазом на внутреннем конце двигателя и пазами на цилиндрической части ступени большего диаметра, в которые входят радиально направленные поводки. Поводки размещены на задней торцевой поверхности ротора. Во внутренней полости ступени большего диаметра двухступенчатой цилиндрической втулки установлена гайка с выступом, контактирующим с продольным пазом. Паз выполнен на втулке с возможностью продольного перемещения гайки. Направление резьбы определяется направлением вращения ротора. Достигается стабильность величины времени готовности гирокоординатора. 1 ил.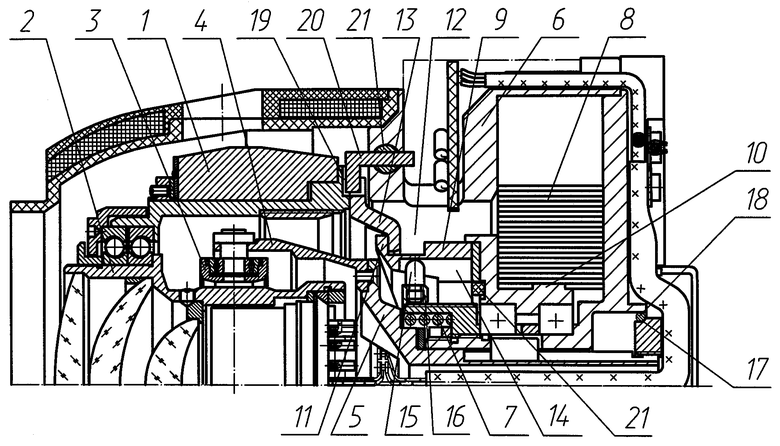
Гирокоординатор головки самонаведения артиллерийского управляемого снаряда, содержащий корпус, ротор на внутреннем кардановом подвесе, установленном в подвижном в осевом направлении основании, пружинный двигатель, разъемно соединенный с ротором двухступенчатой цилиндрической втулкой, установленной с возможностью вращения на корпусе во внутренней полости пружинного двигателя, с зацепом, выполненным на ступени меньшего диаметра, взаимодействующим с пазом на внутреннем конце пружинного двигателя и пазами на цилиндрической части выступов ступени большего диаметра, в которые входят радиально направленные поводки, размещенные на задней торцевой поверхности ротора, отличающийся тем, что во внутренней полости ступени большего диаметра двухступенчатой цилиндрической втулки на корпусе установлена гайка с выступом, контактирующим с продольным пазом, выполненным на втулке, с возможностью продольного перемещения гайки величиной не менее N·S,
где N - число рабочих оборотов пружинного двигателя;
S - шаг резьбы,
а направление резьбы определяется направлением вращения ротора.
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2003 |
|
RU2234049C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2000 |
|
RU2177600C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| US 6036140 A1, 14.03.2000 | |||
| JP 8086599 A1, 02.04.1996. | |||

