Изобретение относится к области управляемых снарядов, а именно, к гирокоординаторам головок самонаведения, используемым в системах управления артиллерийских управляемых снарядов (АУС).
Известен гирокоординатор [ГК] головки самонаведения артиллерийского управляемого снаряда "Копперхед" [1], содержащий корпус, ротор, на передней торцевой поверхности которого выполнено зеркало, ориентированный по продольной оси снаряда, установленный во внутреннем кардановом подвесе, размещенном в основании, пружинный двигатель, помещенный в корпусе ГК. Наружный конец пружины жестко соединен с корпусом, а внутренний разъемно с втулкой, установленной на оси ротора, размещенной во внутренней полости. С целью исключения воздействия на опоры и рамки карданова подвеса инерционной нагрузки ротора в гирокоординаторе используется специальная втулка "Gotcha", размещенная между ротором и корпусом и выполненная в виде подвижного в осевом направлении разрезного кольца с выступами, контактирующими с проточкой, выполненной в теле ротора. Втулка обеспечивает передачу инерционной нагрузки ротора, действующей в момент выстрела, на корпус прибора, минуя опоры и рамки карданова подвеса. Приводится гирокоординатор в действие пиропатроном.
Недостатком конструкции прибора является невозможность его применения при использовании других схем построения гирокоординатора, например, когда оптическая система и приемник излучения размещаются во внутренней рамке карданова подвеса, так как этому препятствует ось ротора, размещенная во внутренней полости ГК.
Наиболее близким к предлагаемому техническому решению является гироскопический прибор [2], содержащий полый ротор, подвешенный на внутреннем кардановом подвесе, установленном в основании, размещенном в корпусе, пружинный двигатель, выполненный в виде отдельного блока, помещенного в расточке корпуса. Механизм разгона ротора включает в себя пружинный двигатель и подвижную втулку, образующую в своей верхней части дискообразный шпиндель с двумя диаметрально расположенными зубьями, входящими в соответствующие расточки ротора. Наружным концом пружина крепится к корпусу, а внутренним - к резьбовой втулке, установленной на корпусе.
Стопорение пружинного двигателя осуществляется подпружиненным кулачком, взаимодействующим с паузами, выполненными в нижнем фланце резьбовой втулки, а арретирование кардана обеспечивается шпилькой, которая своим коническим концом входит в углубление на внутренней рамке. Шпилька жестко скреплена с подвижной втулкой, которая может перемещаться в полом основании. Исполнительным элементом, приводящим гироскоп в действие, является пиропатрон.
Недостатком конструкции прибора является низкая ударная прочность в связи с отсутствием разгрузки опор и рамок карданова подвеса от инерционной нагрузки ротора при выстреле.
Задачей предлагаемого изобретения является повышение ударной прочности гирокоординатора головки самонаведения АУС, оптическая система и приемник излучения в котором размещены на внутренней рамке карданова подвеса, путем разгрузки опор и рамок карданова подвеса от инерционной нагрузки ротора.
Указанная задача достигается тем, что в гирокоординаторе головки самонаведения, содержащем корпус, ротор, размещенный на внутреннем кардановом подвесе, основание карданова подвеса, установленное в корпусе, пружинный двигатель, размещенный в корпусе и соединенный разъемно с ротором, пиротехнический элемент, в нем ротор установлен с возможностью контактирования задней торцевой поверхностью с опорной поверхностью корпуса, основание установлено в корпусе с возможностью продольного перемещения и поворота дополнительно введенным упругим элементом сжатия- кручения, на заднем торце основания закреплена втулка с выступом и пазом, с которым взаимодействует ступенью большего диаметра двухступенчатый цилиндрический подпружиненный фиксатор, установленный параллельно продольной оси во фланце, закрепленном на задней стенке корпуса, в котором установлен пиротехнический элемент, контактирующий со ступенью меньшего диаметра фиксатора, и выполнена ограничительная поверхность, взаимодействующая с выступом втулки, на задней торцевой поверхности ротора выполнен паз, в который входит упор, установленный на опорной поверхности корпуса, при этом величина перекрытия в осевом направлении большего диаметра фиксатора с пазом втулки меньше рабочего хода пиротехнического элемента, величина продольного перемещения основания больше глубины вхождения упора в паз ротора, а направление перемещения фиксатора под действием усилия пиротехнического элемента совпадает с направлением ускорения при выстреле.
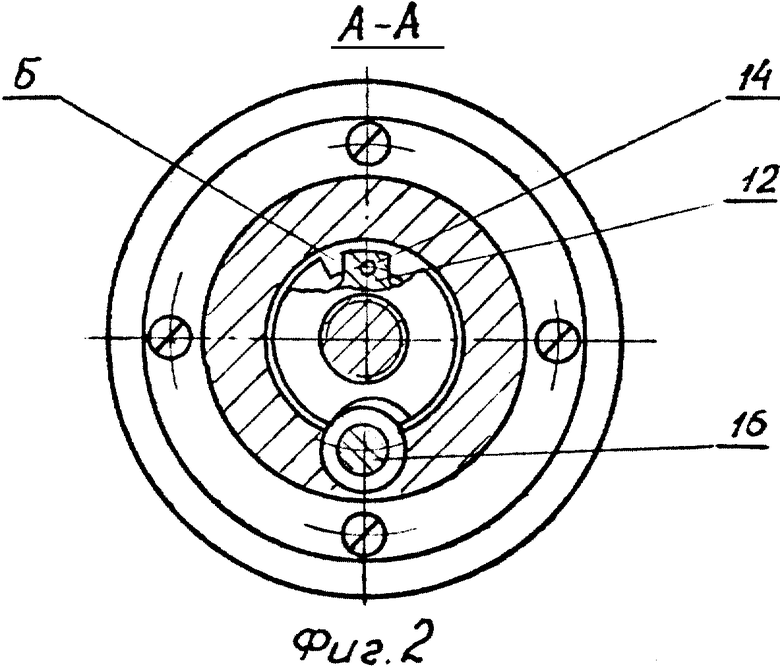
На фиг. 1, 2 изображен общий вид описываемого устройства в осевом сечении и необходимый разрез.
Ротор 1 в кардановом подвесе, состоящем из внутренней 2 и наружной 3 рамок, установлен в основании 4. Во внутренней рамке размещены оптическая система 5 и приемник излучения 6. Основание 4 своим хвостовиком 7 установлено в корпусе 8 с возможностью перемещения в продольном и угловом направлениях под действием упругого элемента сжатия- кручения 9. В расточке корпуса 8 размещен пружинный двигатель 10, наружный конец которого жестко закреплен на корпусе, а внутренний соединен со втулкой 11, установленной с возможностью вращения относительно корпуса и разъемно соединенной с ротором посредством устройства 12, обеспечивающим расстыковку с ротором 1 после окончания разгона ротора и выполненного, например, в виде обгонной муфты.
На хвостовике 7 основания карданова подвеса закреплена втулка 13, которая в заарретированном положении своим выступом 14 контактирует с ограничительной поверхностью Б, выполненной во фланце 15, установленном на задней стенке корпуса 8. Удержание втулки 13 в угловом положении, обеспечивающем контактирование выступа 14 с поверхностью Б, осуществляется фиксатором 16, выполненным в виде двухступенчатого подпружиненного цилиндра, установленного подвижно в осевом направлении во фланце 15 параллельно продольной оси ГК. Ступенью большего диаметра фиксатор взаимодействует с пазом, выполненным во втулке 13. Торец меньшего диаметра фиксатора контактирует с пиротехническим элементом 17, установленным во фланце, а торец большего диаметра - с пружиной 18.
Для удержания ротора от вращения на его задней торцевой поверхности выполнен паз 19, в который входит упор 20, установленный на опорной поверхности В корпуса 8. Контактирование ротора с опорной поверхностью корпуса обеспечивается с помощью прокладок 21, устанавливаемых между корпусом 8 и фланцем 15.
Работает гирокоординатор следующим образом. При выстреле ГК заарретирован и инерционная нагрузка ротора за счет установки его относительно опорной поверхности корпуса без зазора передается на корпус, минуя опоры и рамки карданова подвеса, чем обеспечивается их разгрузка. На траектории головка самонаведения формирует сигнал "Захват", по которому на пиротехнический элемент подается импульс тока. Пиротехнический элемент 17 срабатывая, перемещает фиксатор 16, в результате чего он выходит из паза втулки. При этом для перемещения фиксатора в процессе разарретирования используется направление, совпадающее с направлением ускорения при выстреле, чем обеспечивается нечувствительность этой детали к действию ускорения. Под действием крутящего момента пружины 9 основание 4 карданова подвеса разворачивается, выступ 14 втулки 13 сходит с ограничительной поверхности Б фланца 15 и основание вместе с ротором под действием усилия пружины 9 перемещается, отходя от опорной поверхности корпуса 8. Упор 20 при этом выходит из паза 19 на роторе и последний под действием крутящего момента пружинного двигателя 10 начинает разгоняться. Когда величина крутящего момента станет равной нулю, поводки устройства 12, обеспечивающего передачу момента на ротор, складываются и ротор разарретируется.
Проведенные испытания предложенной конструкции гирокоординатора показали, что он выдерживает воздействие одиночного удара с перегрузкой до 11000 единиц без изменения точностных характеристик.
Источники информации
1. "Electronic packaging and production" 1980 г., volume 20, number 5, стр. 68-86 (рис. 11).
2. Патент США, нац. кл. 74-5.12, N 3263508 от 27.08.1964 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2003 |
|
RU2234049C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2010 |
|
RU2421686C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1999 |
|
RU2180728C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2176779C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2010 |
|
RU2442103C1 |
| Гирокоординатор головки самонаведения | 2016 |
|
RU2621218C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2010 |
|
RU2416069C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2179302C1 |
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2003 |
|
RU2239788C1 |
Изобретение относится к области управляемых артиллерийских снарядов. Гирокоординатор головки самонаведения содержит корпус, ротор, размещенный на внутреннем кардановом подвесе, основание карданова подвеса, установленное в корпусе, пружинный двигатель, размещенный в корпусе и соединенный разъемно с ротором, пиротехнический элемент. Ротор установлен с возможностью контактирования задней торцевой поверхностью с опорной поверхностью корпуса. Основание установлено в корпусе с возможностью продольного перемещения и поворота дополнительно введенным упругим элементом сжатия-кручения. На заднем торце основания закреплена втулка с выступом и пазом, с которым взаимодействует ступенью большего диаметра двухступенчатый цилиндрический подпружиненный фиксатор, установленный параллельно продольной оси во фланце, закрепленном на задней стенке корпуса. Во фланце установлен пиротехнический элемент, контактирующий со ступенью меньшего диаметра фиксатора, и выполнена ограничительная поверхность, взаимодействующая с выступом втулки. На задней торцевой поверхности ротора выполнен паз, в который входит упор, установленный на опорной поверхности корпуса. При этом величина перекрытия в осевом направлении большего диаметра фиксатора с пазом втулки меньше рабочего хода пиротехнического элемента, величина продольного перемещения основания больше глубины вхождения упора в паз ротора, а направление перемещения фиксатора под действием усилия пиротехнического элемента совпадает с направлением ускорения при выстреле. Изобретение позволяет повысить ударную прочность гирокоординатора головки самонаведения управляемого артиллерийского снаряда путем разгрузки опор и рамок карданова подвеса от инерционной нагрузки ротора при выстреле. 2 ил.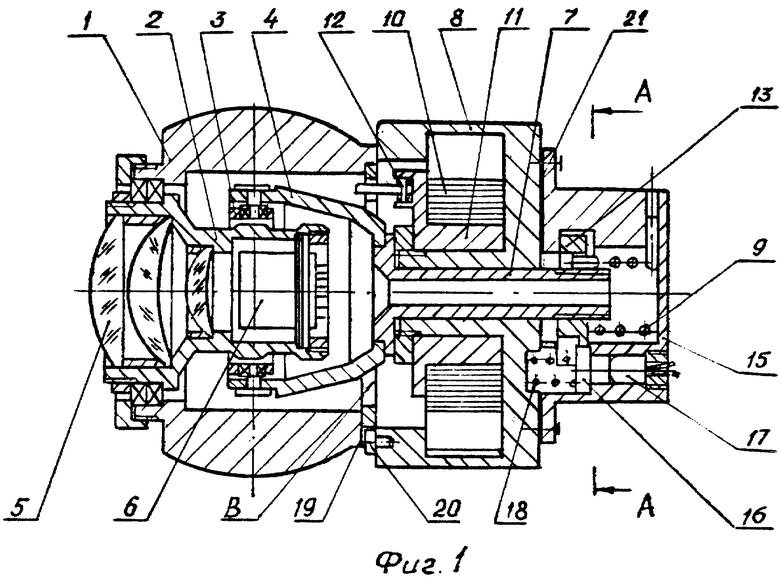
Гирокоординатор головки самонаведения артиллерийского управляемого снаряда, содержащий корпус, ротор, размещенный на внутреннем кардановом подвесе, основание карданова подвеса, установленное в корпусе, пружинный двигатель, размещенный в корпусе и соединенный разъемно с ротором, пиротехнический элемент, отличающийся тем, что ротор установлен с возможностью контактирования задней торцевой поверхностью с опорной поверхностью корпуса, основание установлено в корпусе с возможностью продольного перемещения и поворота дополнительно введенным упругим элементом сжатия - кручения, на заднем торце основания закреплена втулка с выступом и пазом, взаимодействующим со ступенью большего диаметра двухступенчатого цилиндрического подпружиненного фиксатора, установленного параллельно продольной оси во фланце, закрепленном на задней стенке корпуса, в котором установлен пиротехнический элемент, контактирующий со ступенью меньшего диаметра фиксатора и выполнена ограничительная поверхность, взаимодействующая с выступом втулки, на задней торцевой поверхности ротора выполнен паз, контактирующий с упором, установленным на опорной поверхности корпуса, при этом величина перекрытия в осевом направлении большего диаметра фиксатора с пазом втулки меньше рабочего хода пиротехнического элемента, величина продольного перемещения основания больше глубины вхождения упора в паз ротора, а направление перемещения фиксатора под действием усилия пиротехнического элемента совпадает с направлением ускорения при выстреле.
| US 3263508, 02.06.1966 | |||
| ГИРОКООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 1994 |
|
RU2093782C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТ | 2006 |
|
RU2318172C1 |
| US 4949917, 21.08.1990 | |||
| УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ И СПОСОБ УПРАВЛЕНИЯ СОВОКУПНОСТЬЮ | 2018 |
|
RU2751040C2 |
| 1970 |
|
SU411899A1 | |

