Изобретения относятся к машиностроению, а именно к области создания средств и методов бесконтактного измерения эксцентриситета, неровности, геометрических размеров и перемещений деталей машин и механизмов.
Известны способы измерения зазоров между измерительным преобразователем и контролируемой поверхностью с помощью измерительных устройств для бесконтактного контроля механического состояния деталей машин на основе, например, преобразователей емкостного и вихретокового типов (Харламов В.В. Методы и средства диагностирования технического состояния коллекторно-щеточного узла тяговых электродвигателей и других коллекторных машин постоянного тока: Монография, Омский гос. ун-т путей сообщения. Омск, 2002, 233 с.).
На результаты измерений данными устройствами при используемых методах измерений, как правило, оказывают влияние различного рода внешние факторы, например удельное электрическое сопротивление контролируемых поверхностей, скорость относительного перемещения измерительного преобразователя и контролируемой поверхности, а также их взаимное расположение и др.
Известен способ измерения профилей коллекторов и механического состояния роторов электрических машин путем динамической градуировки измерительного устройства с помощью образцовой медной пластины заданной высоты, наклеенной на одну из пластин коллектора (Герасимов В.Г. и др. Методы и приборы электромагнитного контроля промышленных изделий. - М.: Энергоатомиздат, 1983, стр. 200). Данный способ предполагает вмешательство в объект измерения (наклеивание образцовой пластины) и, кроме того, не гарантирует необходимую точность градуировки для остальных пластин коллектора, т.к. они могут иметь различное удельное электрическое сопротивление поверхностного слоя вследствие особенностей механической обработки поверхности коллектора, разную температуру и т.п., что непосредственно влияет на результаты измерений вихретоковым преобразователем.
Известен способ измерения толщины плакировки и зазора между измерительным преобразователем вихретокового типа и контролируемой поверхностью с итерационно-тестовой коррекцией погрешности, выбранный в качестве прототипа (Герасимов В.Г. и др. Методы и приборы электромагнитного контроля промышленных изделий. - М.: Энергоатомиздат, 1983, стр. 256-258).
Сущность данного способа состоит в выполнении опорного измерения при начальном значении зазора между измерительным преобразователем измерительного устройства и контролируемой областью объекта контроля, запоминании результата измерения, последующем изменении зазора в сторону его увеличения на фиксированную образцовую величину путем размещения между измерительным преобразователем и контролируемой областью объекта (без воздушных зазоров) специального элемента с заранее измеренной эталонной толщиной, выполнении дополнительного измерения при увеличенном зазоре, запоминании результата дополнительного измерения, вычислении расчетных значений толщины плакировки (X1n, X2n) на основе результатов опорного и дополнительного измерений и принятой величине начального зазора, вычислении погрешности расчета толщины плакировки и ее сравнение с заданной погрешностью, вычислении уточненного параметра зазора (εn+1=εn+k(X1n-X2n), где k - коэффициент итерации), повторении циклов вычислений с уточненными параметрами зазора до момента, когда погрешность расчета толщины плакировки будет меньше заданной погрешности, определении соответствующих последнему итерационному циклу расчетных значений толщины плакировки и зазора между измерительным преобразователем и контролируемой поверхностью объекта контроля.
Недостатком рассматриваемого способа является то, что определение откорректированных значений измеряемых параметров осуществляется с использованием итерационного метода, что увеличивает время расчета и, соответственно, время определения измеряемого параметра. Измерение зазора в данном способе носит вспомогательный характер и служит для уточнения расчетов толщины плакированных покрытий деталей машин.
Изменение зазора в данном способе предлагается осуществлять лишь в сторону его увеличения путем размещения между измерительным преобразователем и контролируемой областью объекта специального элемента эталонной толщины (без воздушных зазоров), что сужает область применения указанного способа в промышленности (наряду с увеличенным временем определения измеряемого параметра). Так, например, измерение зазора между измерительным преобразователем и подвижным объектом при данном способе становится невозможным.
Кроме того, в рассмотренном способе не регламентирована величина образцового увеличения зазора в зависимости от точности выполнения данного перемещения и результата опорного измерения, что может существенно снизить точность итоговых результатов измерений.
Задачей изобретений является повышение точности измерений, уменьшение времени определения измеряемого параметра и обеспечение возможности проведения измерений зазоров в процессе взаимных перемещений измерительного преобразователя и объекта контроля.
В первом варианте поставленная задача достигается тем, что в способе измерения зазора между измерительным преобразователем и контролируемой поверхностью, включающем, так же как в прототипе, выполнение опорного измерения указанного зазора, увеличение зазора на образцовую величину δо, выполнение дополнительного измерения увеличенного зазора, определение значений измеряемых зазоров с учетом результатов опорного и дополнительного измерений, а также образцовой величины зазора. Согласно изобретению указанное увеличение зазора производят до выполнения условия

где yo, yд - результаты опорного и дополнительного измерений зазоров, м;
Δ - максимальная погрешность увеличения зазора на образцовую величину, м;
Δx - допустимая погрешность измерений зазора, обусловленная неточностью увеличения зазора на образцовую величину, м,
затем измеряют образцовую величину увеличения зазора как перемещение измерительного преобразователя и контролируемой поверхности относительно друг друга, производят последующие измерения зазора при его изменении вследствие перемещений контролируемой поверхности, определяют значение зазора в соответствии с выражением
xpi=yi/a,
где  - параметр градуировочной характеристики;
- параметр градуировочной характеристики;
δо - образцовая величина увеличения зазора, м;
yi - результат i-го измерения зазора, м.
Во втором варианте поставленная задача достигается тем, что в способе измерения зазора между измерительным преобразователем и контролируемой поверхностью, включающем, так же как в прототипе, выполнение опорного измерения указанного зазора, изменение зазора на образцовую величину δo, выполнение дополнительного измерения измененного зазора, определение значений измеряемых зазоров с учетом результатов опорного и дополнительного измерений, а также образцовой величины зазора. Согласно изобретению указанное изменение зазора производят в сторону его уменьшения до выполнения условия

где yo, yд - результаты опорного и дополнительного измерений зазора, м;
Δ - максимальная погрешность уменьшения зазора на образцовую величину, м;
Δx - допустимая погрешность измерений зазора, обусловленная неточностью уменьшения зазора на образцовую величину, м,
затем измеряют образцовую величину уменьшения зазора как перемещение измерительного преобразователя и контролируемой поверхности относительно друг друга, производят последующие измерения зазора при его изменении вследствие перемещений контролируемой поверхности, определяют значение зазора в соответствии с выражением
xpi=yi/a,
где  - параметр градуировочной характеристики;
- параметр градуировочной характеристики;
δo - образцовая величина уменьшения зазора, м;
yi - результат i-го измерения зазора, м.
Сущность предлагаемых способов измерений по первому и второму вариантам состоит в следующем.
При использовании бесконтактного измерительного устройства (например, с вихретоковым преобразователем), градуировочная характеристика которого выполнена линейной (Бромберг Э.М., Куликовский К.Л. Тестовые методы повышения точности измерений. - М.: Энергия, 1978, 176 с.), зависимость выходного параметра от измеряемой величины записывается в виде выражения

где yi - выходной параметр измерительного устройства, м;
х - измеряемый зазор между измерительным преобразователем измерительного устройства и контролируемой областью объекта контроля, м;
а1i, а2i - параметры градуировочной характеристики.
При надлежащих установке измерительного преобразователя относительно измеряемого объекта и настройке измерительного устройства может быть принято допущение
Тогда выражение (1) преобразуется к виду

Из данного выражения следует, что выходной параметр измерительного устройства пропорционален не только измеряемому зазору х, но и параметру градуировочной характеристики а2i, являющемуся, по существу, коэффициентом усиления измерительного тракта, который в общем случае зависит от многих параметров, в том числе от внешних воздействий на объект измерения и элементы измерительного устройства.
Поэтому целесообразно осуществлять коррекцию параметра а2i в процессе измерений, что позволяет повышать точность измерений. Это может быть выполнено, например, путем проведения опорного измерения и дополнительного измерения при увеличенном на образцовую величину зазоре. При этом будем иметь систему двух уравнений с одинаковым параметром а2i, поскольку измерения проводятся на одном объекте при идентичных возмущающих воздействиях

где δo - образцовая величина изменения зазора, м.
Решение системы (4) имеет следующий вид:


Из выражения (5) следует, что расчетное значение зазора не зависит от указанной выше нестабильности параметра а2i, что обеспечивает повышение точности измерений. В случае уменьшения зазора на образцовую величину, система исходных уравнений записывается аналогично системе (4)

Решение данной системы имеет вид


Таким образом, выражения (5), (7) обеспечивают достаточно простую корректировку параметра а2i линейной градуировочной характеристики измерительного устройства при любом направлении изменения зазора, что позволяет существенно снизить отрицательное влияние ряда факторов на результат измерения и повысить его точность.
Поскольку изменение зазора на образцовую величину выполняется с определенной погрешностью (которая может быть обусловлена неточностью измерения данного перемещения по тем или иным причинам), то это влияет на точность определения параметра градуировочной характеристики а2i и, соответственно, измеряемого зазора. Для того чтобы погрешность измерения зазора от неточности его изменения на образцовую величину не превышала заданного значения, необходимо изменять зазор до тех пор, пока не будут выполняться условия:
при увеличении зазора (по первому варианту)

при уменьшении зазора (по второму варианту)
где Δ - максимальная погрешность изменения зазора на образцовую величину, м;
Δx - допустимая погрешность измерений зазора, обусловленная неточностью изменения зазора на образцовую величину, м.
Достигнутая при этом величина образцового изменения зазора δo измеряется с помощью вспомогательной измерительной системы и используется для определения параметра а2i и результатов измерений в соответствии с выражениями (5, 7).
В настоящей заявке соблюдено требование единства изобретения, поскольку предложенные способы измерения зазора решают одну и ту же задачу и позволяют достаточно просто уточнять результаты измерений и получать достоверную информацию в условиях воздействия возмущающих факторов различной природы, а также уменьшить время определения итоговых результатов измерений и расширить область применения предлагаемых способов измерения, распространив его на подвижные объекты.
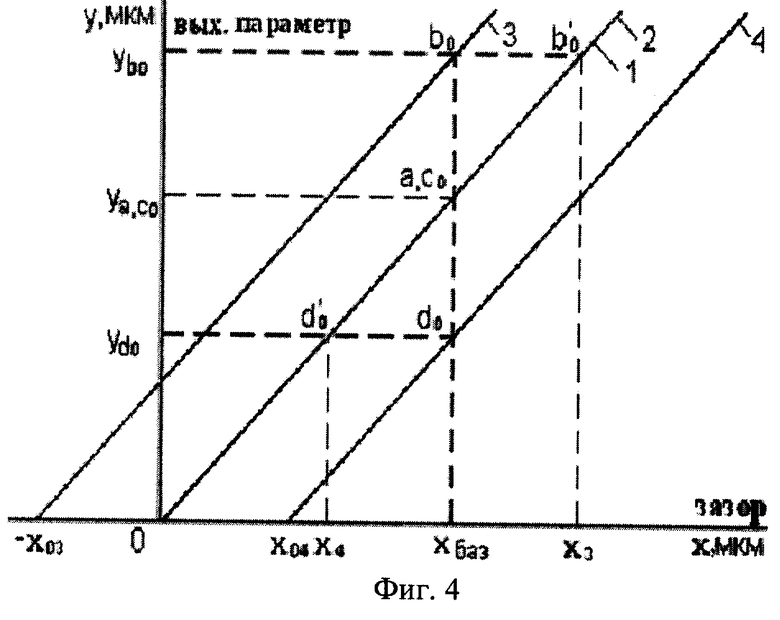
На фиг.1 приведена структурная схема бесконтактного профилометра вихретокового типа.
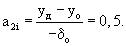
На фиг.2 показан пример установки измерительного преобразователя относительно объекта измерения.
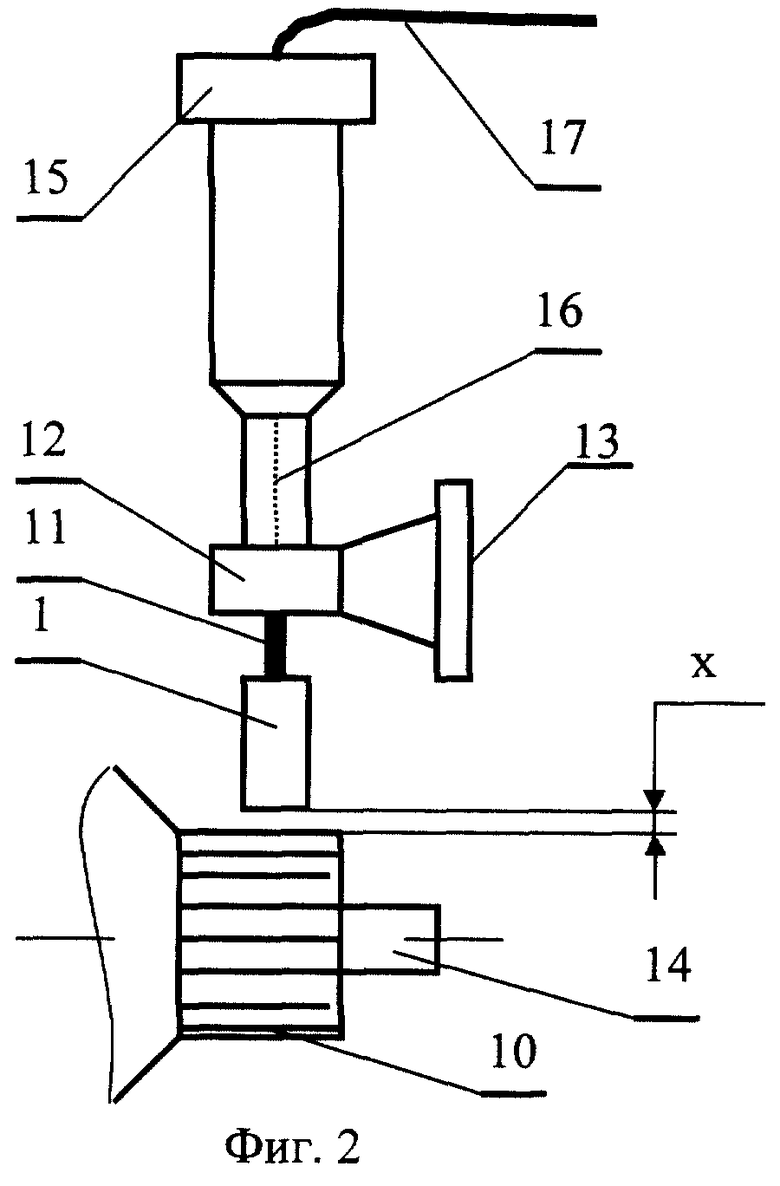
На фиг.3 представлены градуировочные характеристики профилометра.
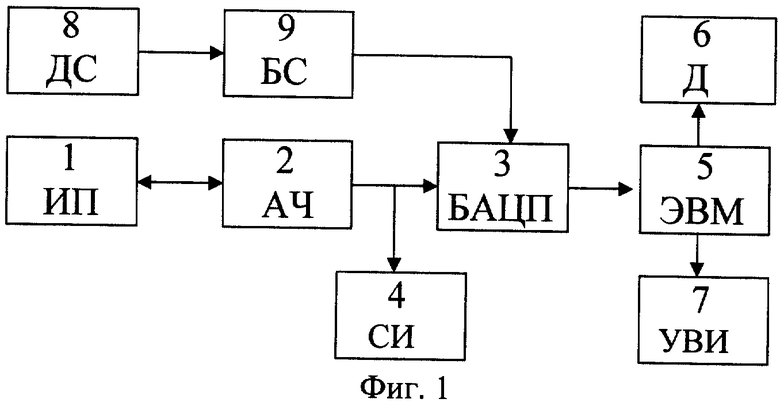
На фиг.4 изображены откорректированные расчетным путем градуировочные характеристики профилометра.
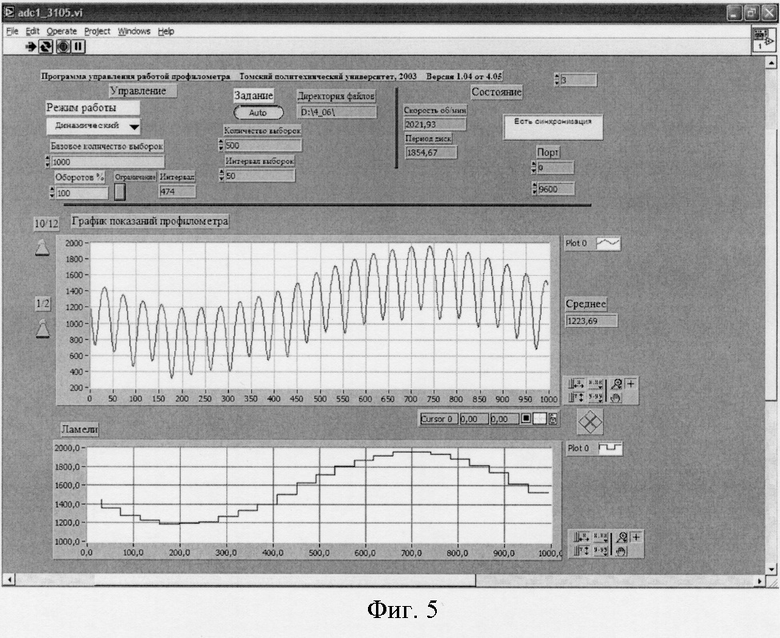
На фиг.5 приведен пример вывода результатов измерений профиля коллектора на экран дисплея.
Сущность заявленных способов измерения по первому и второму вариантам может быть пояснена с помощью бесконтактного профилометра с вихретоковым измерительным преобразователем, структурная схема которого приведена на фиг.1.
Он состоит из измерительного преобразователя (ИП)1 вихретокового типа, электрически связанного с аналоговой частью (АЧ)2. Аналоговая часть (АЧ)2 соединена с блоком аналого-цифрового преобразователя (БАЦП)3 и стрелочным индикатором (СИ)4. Блок аналого-цифрового преобразователя (БАЦП)3 подключен к электронно-вычислительной машине (ЭВМ)5, которая соединена с дисплеем (Д)6, а также с устройством выдачи информации (УВИ)7. Профилометр также содержит датчик синхронизации (ДС)8, соединенный с блоком синхронизации (БС)9, который подключен к блоку аналого-цифрового преобразователя (БАЦП)3.
Установка измерительного преобразователя (ИП)1 относительно, например, коллектора 10 электрической машины может быть осуществлена с помощью устройства с микрометрическим винтом (фиг.2). Оно состоит из подвижного (в направлении, перпендикулярном цилиндрической поверхности коллектора 10) элемента 11, на котором крепится измерительный преобразователь (ИП)1, корпуса 12, закрепленного на основании 13, неподвижном относительно опор вала 14, вращающегося элемента 15, шкалы отсчета 16 линейного перемещения элемента 11, а также электрического кабеля 17, соединяющего измерительный преобразователь (ИП)1 с аналоговой частью (АЧ)2 профилометра. Конструкции вихретоковых измерительных преобразователей (ИП)1, аналоговой части (АЧ)2, датчика синхронизации (ДС)8 и блока синхронизации (БС)9 данного прибора достаточно хорошо отработаны и описаны в технической литературе (Герасимов В.Г. и др. Методы и приборы электромагнитного контроля промышленных изделий. - М.: Энергоатомиздат, 1983; Харламов В.В. Методы и средства диагностирования технического состояния коллекторно-щеточного узла тяговых электродвигателей и других коллекторных машин постоянного тока: Монография, Омский гос. ун-т путей сообщения. Омск, 2002, 233 с.). Блок аналого-цифрового преобразователя 3 (БАЦП) может состоять, например, из аналого-цифрового преобразователя AD7892-2, микроконтроллера ATmegal28-16 и входного усилителя AD820. Функции электронно-вычислительной машины (ЭВМ)5 может выполнять IBM PC - совместимый персональный компьютер (с процессором Intel Celeron 900 МГц, ОЗУ объемом 64 МБ, операционная система Windows ХР), а дисплея 5 (Д) -SVGA-монитор Samsung SyncMaster 551s. В качестве устройства выдачи информации (УВИ)7 может использоваться принтер Lexmark Z12. Функции стрелочного индикатора 4 (СИ) может выполнять прибор М1690А.
Профилометр (фиг.1) предназначен для контроля профиля коллекторов электрических машин в динамических режимах работы. Погрешности измерений в этом случае могут быть обусловлены неодинаковыми удельными электрическими сопротивлениями отдельных ламелей коллектора (особенно их поверхностного слоя, свойства которого могут зависеть от технологии обработки), разностью температур нагрева ламелей и неточностью ориентации датчика относительно измеряемой цилиндрической поверхности, а также неидентичностью расположения ламелей в корпусе коллектора.
Проблема снижения указанных погрешностей может быть в какой-то степени решена путем коррекции параметра градуировочной характеристики (коэффициента усиления измерительного тракта прибора) в процессе измерения зазора между измерительным преобразователем и произвольно взятой ламелью (расстояние х на фиг.2).
Сущность данных способов можно пояснить на следующем примере.
Пусть параметр градуировочной характеристики (коэффициент усиления измерительного канала) определен при измерении зазора между измерительным преобразователем (ИП)1 и ламелью №1 коллектора 10. Тогда градуировочная характеристика прибора (у=f(x)) представляет собой прямую, проходящую через ноль под углом 45° к оси абсцисс (фиг.3). При этом значения на выходе прибора соответствуют истинному расстоянию от измерительного преобразователя (ИП)1 до контролируемой поверхности ламели №1 коллектора 10, а прямая 1 является эталонной градуировочной характеристикой (выходной характеристикой профилометра). Если расстояние между измерительным преобразователем (ИП)1 и ламелью №1 равно базовому (рекомендуемое исходное расстояние от измерительного преобразователя (ИП)1 до измеряемого профиля коллектора 10), то на выходе прибора фиксируется значение уа, соответствующее точке а на его градуировочной характеристике (уа=xбаз).
В случае, если ламель №2 с тем же уровнем профиля, что и ламель №1, имеет другое удельное электросопротивление (температуру или неидентичное положение относительно измерительного преобразователя (ИП)1), то градуировочная характеристика прибора при контроле ламели №2 пойдет под другим углом к оси абсцисс (например, как прямая 2 на фиг.3). При этом показания прибора на ламели №2 (yс) будут интерпретированы как расстояние x2, соответствующее точке с' на градуировочной характеристике 1. Измеренное значение x2 здесь отличается от истинного значения xбаз.
По аналогии измеренному значению yb на ламели №3 (характеристика 3), западающей на величину х03 относительно ламелей №1, 2, будет присваиваться ложное значение x3, соответствующее точке b' на эталонной характеристике 1. Для выступающей ламели №4 (на величину х04 относительно ламелей 1, 2) ложное измеренное значение будет равно x4, соответствующее точке d’ на характеристике 1 и т.д.
Для ликвидации расхождений между измеренными значениями и истинными величинами зазоров необходимо наклоны характеристик 2, 3, 4 привести к эталонному значению, которым является наклон характеристики 1. Тангенс угла наклона эталонной характеристики 1 равен 1. Углы наклона характеристик 2, 3, 4 в общем случае не известны и их требуется определить каким-либо образом.
С этой целью в процессе измерения может осуществляться образцовое перемещение (δо) измерительного преобразователя (ИП)1 относительно измеряемого объекта в сторону увеличения зазора, которое фиксируется, например, с помощью шкалы отсчета 16 микрометрического винта (либо измерительных головок и т.п.). При этом фактическая величина зазора между измерительным преобразователем (ИП)1 и ламелями №1, 2 станет равной (хбаз+δо). Показание прибора для точки а1 характеристики 1 будет равно ya1 (yа1=xбаз+δо). Показания прибора для ламелей 2, 3, 4 будут при этом равны yс1, yb1, yd1.
В результате тангенсы углов наклона характеристик 2, 3, 4,...i находятся по выражению
где αi - угол наклона i-й характеристики;
Δyi - приращение показаний прибора на i-й характеристике при перемещении преобразователя на величину δo.
Это, по существу, позволяет определять параметры откорректированных градуировочных характеристик 2, 3, 4,...i
Соответственно откорректированные показания прибора на i-й характеристике равны

При этом откорректированные в соответствии с предложенным способом градуировочные характеристики прибора для ламелей №2, 3, 4 будут выглядеть так, как это показано на фиг.4.
Откорректированная градуировочная характеристика для ламели №2 здесь совпадает с эталонной прямой 1. Соответственно показания прибора для ламелей 1, 2 в базовой точке равны yа, со, что соответствует истинным значениям зазоров между измерительным преобразователем (ИП)1 и ламелями №1, 2 (yа, со=xбаз). Показание прибора на характеристике 3 при этом равно ybо, что соответствует ординате точки b0' на прямой 1 и зазору x3 (х3=xбаз+x03). Аналогично показание прибора на характеристике 4 равно ydo, что соответствует ординате точки do' на эталонной прямой 1 и зазору x4(х4=xбаз-x04).
Следовательно, откорректированные показания прибора соответствуют фактическим значениям зазоров между измерительным преобразователем (ИП)1 и контролируемыми коллекторными пластинами.
Аналогично может быть выполнена корректировка параметра градуировочной характеристики в случае уменьшения зазора на образцовую величину δо.
Измерение зазора между измерительным преобразователем (ИП)1 и рабочей поверхностью коллектора 10 (и соответственно профиля коллектора 10) при данных способах состоит в следующем.
Сначала измерительный преобразователь (ИП)1 устанавливается на базовом расстоянии (например, около 200 мкм) от коллектора 10 (контролируется с помощью стрелочного индикатора (СИ)4, осциллографа или показаний на экране дисплея (Д)6). Затем контролируемый коллектор 10 приводится во вращение и регистрируются первые опорные показания зазоров между измерительным преобразователем (ИП)1 и ламелями коллектора 10 (в соответствии с установленной командой руководства пользователя конкретным типом диагностического прибора), которые хранятся в оперативной памяти электронно-вычислительной машины (ЭВМ)5. При этом сигнал с аналоговой части (АЧ)2 (предназначена для генерирования сигналов высокой частоты, поступающих на измерительный преобразователь (ИП)1, выделения, усиления и преобразования полезного сигнала, поступающего с измерительного преобразователя (ИП)1) поступает в блок аналогово-цифрового преобразователя (БАЦП)3, с которого в оцифрованном виде передается в электронно-вычислительную машину (ЭВМ)5. Там сигнал обрабатывается и определяются значения измеряемого параметра. Датчик синхронизации (ДС)8 и блок синхронизации (БС)9 обеспечивают подачу синхронизирующих импульсов в блок аналого-цифрового преобразователя (БАЦП)3, что позволяет осуществить привязку результатов измерений к конкретным ламелям коллектора 10.
Затем измерительный преобразователь (ИП)1 перемещается относительно корпуса 11 в радиальном направлении коллектора 10 (в сторону увеличения зазора х по первому варианту или его уменьшения по второму варианту) на некоторое расстояние (порядка 50 мкм) с помощью вращающегося элемента 15 (перемещение измерительного преобразователя (ИП)1 контролируется с помощью шкалы отсчета 16, либо с использованием стандартных измерительных приборов контактного типа). Регистрируются вторые дополнительные показания указанных выше зазоров в тех же условиях работы, при которых снималась первая серия показаний. Проверяется выполнение условий (8) или (9) (соответственно при увеличении или уменьшении зазора х). Данная проверка может выполняться на электронно-вычислительной машине (ЭВМ)5 автоматически в зависимости от заданных параметров Δ, Δх и результатов опорного и дополнительного измерений. Если соответствующее условие (условие (8) по первому варианту или (9) по второму варианту) не выполняется, то производится дополнительное увеличение или уменьшение зазора х вплоть до их выполнения.
Например, при результате опорного измерения yо=200 мкм, погрешности изменения зазора Δ=0,5 мкм (определяется классом точности вспомогательной измерительной системы), максимальной погрешности измерения зазора, обусловленной неточностью изменения зазора на образцовую величину, Δх=1 мкм (выбирается исходя из требуемой точности измерения зазора) результат дополнительного измерения должен удовлетворять условиям:
при увеличении зазора (по первому варианту)

при уменьшении зазора (по второму варианту)

После этого значение образцовой величины зазора δo (величина перемещения преобразователя (ИП)1 относительно корпуса 12) вводится в электронно-вычислительную машину (ЭВМ)5. Например, при увеличении зазора с 200 мкм до 300 мкм δo=100 мкм, и при уменьшении зазора с 200 мкм до 100 мкм δo=100 мкм.
На этом ввод данных в электронно-вычислительную машину (ЭВМ)5 заканчивается, и она производит математическую обработку экспериментальных данных в соответствии с выражениями (5), (7), включающую определение параметров откорректированных градуировочных характеристик (10) измерительного тракта для каждой из ламелей по описанному выше способу. Например, если для какой-либо ламели коллектора 10 результаты опорного и дополнительного измерений при образцовом увеличении зазора (первый вариант) в 100 мкм были равны: yо=150 мкм, yд=225 мкм, то параметр откорректированной градуировочной характеристики для рассматриваемой ламели будет определяться следующим образом:

В случае последующего образцового уменьшения зазора (второй вариант) на ту же величину (yо=225 мкм, yд=150 мкм) параметр откорректированной градуировочной характеристики для рассматриваемой ламели будет определяться

Следовательно, величина параметра откорректированной градуировочной характеристики для рассматриваемой ламели (рассчитанная по уравнениям любого из вариантов) не зависит от направления изменения зазора на образцовую величину.
Конечные данные о зазорах и состоянии профиля коллектора 10 выдаются на экран дисплея (Д)5 в виде диаграммы или таблицы, которые могут быть в дальнейшем сохранены в том или ином виде (например, в виде электронных копий или на бумажном носителе с помощью устройства выдачи информации (УВИ)7).
Пример вывода результатов измерений профиля коллектора 10 на дисплей (Д)5 приведен на фиг.5.
Здесь на верхней диаграмме приведена кривая изменения зазора между измерительным преобразователем (ИП)1 и коллектором 10 в процессе его вращения. Локальные максимумы данной кривой соответствуют положению измерительного преобразователя (ИП)1 над той, или иной ламелью коллектора 10, а величины данных максимумов определяются величинами зазоров между измерительным преобразователем (ИП)1 и ламелями коллектора 10. Чем меньше указанный зазор, тем больше величина максимума. На нижней диаграмме фиг.5 представлен итоговый профиль коллектора 10, положения ламелей на которой соответствуют величинам локальных максимумом на верхней диаграмме.
Если условия, при которых определялись параметры откорректированных градуировочных характеристик (10), не изменяются в процессе эксплуатации коллектора 10 (неизменная температура ламелей коллектора 10 и установка измерительного преобразователя (ИП)1), то данные параметры могут быть использованы и при дальнейших измерениях зазоров и, соответственно, профиля коллектора 10, который может изменяться со временем, либо при изменении частоты вращения коллектора 10.
Другим примером применения заявленных способов может служить использование измерительного устройства рассмотренного ранее типа (фиг.1) для регистрации линейных микроперемещений какого-либо объекта, например щетки электрической машины в колодце щеткодержателя в процессе эксплуатации. С этой целью на наружную торцевую поверхность щеки может быть наклеена медная фольга, относительно которой базируется вихретоковый измерительный преобразователь (ИП)1. После этого при неработающем электродвигателе проводятся операции опорного и дополнительного измерений, аналогичные описанным выше, что позволяет определить параметр градуировочной характеристики
Здесь знак (+) соответствует случаю увеличения зазора на δо (по первому варианту), знак (-) - его уменьшению на δо (по второму варианту). Например, при yо=50 мкм, yд=100 мкм, δо=100 мкм величина параметра градуировочной характеристики будет равна

В случае уменьшения зазора (yо=150 мкм, yд=100 мкм, δо=100 мкм) получается то же значение параметра
Все дальнейшие вычисления зазоров между измерительным преобразователем (ИП)1 и щеткой при работающем электродвигателе и вибрирующей щетке осуществляются путем деления результатов измерений уi на расчетный параметр градуировочной характеристики (12). В результате измерений может быть выявлен характер и основные параметры вибраций щетки при работе электродвигателя.
Изменение зазора на образцовую величину может быть выполнено как перемещением измерительного преобразователя (ИП)1 относительно объекта измерения, так и перемещением самого объекта относительно измерительного преобразователя (ИП)1, что определяется технологической целесообразностью. Области объекта контроля, относительно которых измеряются зазоры, должны быть одними и теми же в опорном, дополнительном и других циклах измерения, что обеспечивает минимальную погрешность измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА МЕЖДУ ИЗМЕРИТЕЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ И КОНТРОЛИРУЕМОЙ ПОВЕРХНОСТЬЮ В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2007 |
|
RU2327104C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВИБРАЦИЙ КОНТРОЛИРУЕМОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2338154C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПРОФИЛЯ КОНТРОЛИРУЕМОЙ ПОВЕРХНОСТИ В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2007 |
|
RU2331043C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСТАЦИОНАРНЫХ ПЕРЕМЕЩЕНИЙ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2561792C1 |
| МАНОТРОН | 1987 |
|
SU1471821A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЛАЖНОСТИ ГАЗА | 2010 |
|
RU2421713C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ПОКАЗАНИЙ ЗАКЛАДНЫХ СТРУННЫХ ДАТЧИКОВ | 2018 |
|
RU2690510C1 |
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1267264A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОПТИЧЕСКОЙ РАЗНОСТИ ФАЗ | 1990 |
|
RU2028577C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СИГНАЛА | 2004 |
|
RU2254580C1 |
Изобретение относится к измерительной технике и предназначено для бесконтактного измерения зазоров, эксцентриситета, неровности, геометрических размеров и перемещений деталей машин и механизмов. Выполняют опорное измерение, затем изменяют зазор на образцовую величину в сторону его увеличения или уменьшения и дополнительно измеряют измененный зазор. Образцовую величину изменения зазора задают исходя из направления изменения зазора и заданной погрешности измерений. Затем измеряют образцовую величину зазора и определяют значения измеряемых зазоров на основе уточненных величин параметров градуировочной характеристики. Способ позволяет с повышенной точностью измерять зазоры между измерительным преобразователем и перемещающимися элементами машин и механизмов. 2 н.п. ф-лы, 5 ил.
где yо, yд - результаты опорного и дополнительного измерений зазоров, м;
Δ - максимальная погрешность увеличения зазора на образцовую величину, м;
Δх - допустимая погрешность измерений зазора, обусловленная неточностью увеличения зазора на образцовую величину, м,
затем измеряют образцовую величину увеличения зазора как перемещение измерительного преобразователя и контролируемой поверхности относительно друг друга, производят последующие измерения зазора при его изменении вследствие перемещений контролируемой поверхности, определяют значение зазора в соответствии с выражением
xpi=yi/a,
где  - параметр градуировочной характеристики;
- параметр градуировочной характеристики;
δo - образцовая величина увеличения зазора, м;
yi - результат i-го измерения зазора, м.
где yо, yд - результаты опорного и дополнительного измерений зазоров, м;
Δ - максимальная погрешность увеличения зазора на образцовую величину, м;
Δx - допустимая погрешность измерений зазора, обусловленная неточностью увеличения зазора на образцовую величину, м,
затем измеряют образцовую величину уменьшения зазора как перемещение измерительного преобразователя и контролируемой поверхности относительно друг друга, производят последующие измерения зазора при его изменении вследствие перемещений контролируемой поверхности, определяют значение зазора в соответствии с выражением
xpi=yi/a,
где  - параметр градуировочной характеристики;
- параметр градуировочной характеристики;
δо - образцовая величина увеличения зазора, м;
уi - результат i-го измерения зазора, м.
| ГЕРАСИМОВ В.Г | |||
| и др | |||
| Методы и приборы электромагнитного контроля промышленных изделий | |||
| - М.: Энергоатомиздат, 1983, с.200, 256-258 | |||
| Устройство для измерения радиального отклонения прецессирующего вала | 1989 |
|
SU1663396A1 |

