Предлагаемое изобретение относится к устройству индексированной регулировки положения подвижной детали, выполненной с возможностью вращения вокруг оси относительно опорной детали, причем эта опорная деталь выполнена неподвижной относительно упомянутой оси.
В соответствии с одним из возможных вариантов реализации предлагаемого изобретения упомянутая подвижная деталь представляет собой подлокотник кресла, в частности автомобильного кресла.
Эти подлокотники, как известно, характеризуются тем, что они
- являются регулируемыми по угловому положению в вертикальной плоскости относительно некоторой опорной плоскости, которая обычно представляет собой горизонтальную плоскость;
- обладают способностью убираться в положение, которое обычно размещается в плоскости расположения спинки данного кресла.
Из существующего уровня техники в данной области уже известны многочисленные варианты реализации устройств регулировки положения подлокотников автомобильных кресел. В качестве примеров можно сослаться на следующие патенты: DE-A-4330448, DE-A-4227871, DE-4022840, DE-3611929, ЕР-А-010867, ЕР-А-018662, ЕР-А-061967, ЕР-А-104040, US-A-4807935, FR-A-2406752, FR-A-2636278, FR-A-2704661.
Говоря более конкретно, в последующем изложении будут даваться ссылки на патент FR-A-2737263, того же автора, что и настоящая заявка.
В соответствии с первым вариантом осуществления устройства по патенту FR-A-2737263, схематически представленным на фиг.2-9, это устройство, характеризующее существующий уровень техники в данной области, позволяет, начиная от первого крайнего положения Р1 его подвижной детали и перемещая эту подвижную деталь в первом направлении вращения S1, обеспечить
- прежде всего, пошаговое движение этой подвижной детали вплоть до момента, когда эта деталь достигнет некоторого промежуточного положения Р3;
а затем, на втором этапе и за пределами упомянутого промежуточного положения РЗ, свободное движение этой подвижной детали в направлении вращения S1 или в противоположном ему направлении S2 таким образом, чтобы эта подвижная деталь имела возможность:
- либо быть переведенной в свое первое крайнее положение Р1 в результате свободного вращения в направлении S2, причем некоторое упругое средство при этом, в случае необходимости, оказывает воздействие на эту подвижную деталь в упомянутом направлении S2;
- либо быть переведенной в свое второе крайнее положение Р2 путем свободного вращения в направлении S1, причем некоторое упругое средство при этом, в случае необходимости, оказывает воздействие на эту подвижную деталь в упомянутом направлении S1.
Шаговое или дискретное движение, насечка за насечкой или движение с дискретными приращениями обеспечивается при помощи механизма с качающейся собачкой, снабженной насечками и способной находиться в следующих состояниях, определяемых с точки зрения относительного положения этой собачки и рампы с насечками, располагающейся на детали, закрепленной на упомянутой подвижной детали:
состояние отведения друг от друга насечек собачки и насечек рампы, причем в этом случае подвижная деталь может быть свободно перемещена по вращательному движению в любом из направлений S1 и S2;
множество состояний полной опоры насечек собачки на насечки рампы, каждое из которых соответствует заданному положению подвижной детали, которая в этом случае может перемещаться только в направлении S1;
множество состояний регулировки, в каждом из которых только одна из насечек собачки находится в контакте с рампой, причем это состояние регулировки отделяет друг от друга каждое из состояний полной опоры в процессе осуществления вращательного движения подвижной детали в направлении 31 между ее положениями Р1 и Р3.
Упругий орган оказывает постоянное воздействие на собачку в направлении рампы с насечками.
Деталь, на которой закреплена рампа с насечками, снабжена кулачковой дорожкой, позволяющей приводить в действие средство расцепления качания собачки. Эта кулачковая дорожка содержит упоры, которые в том случае, когда они входят в контакт с противостоящими им упорами, предусмотренными на собачке, позволяют обеспечить:
переход собачки из ее положения полной опоры в положение ее отведения при осуществлении поворота упомянутой подвижной детали в направлении S1;
возврат собачки из ее положения отведения до первого положения ее полной опоры при осуществлении поворота упомянутой подвижной детали в направлении S2 и возврат в первое крайнее положение P1.
Упругое средство обеспечивает удержание собачки в положении отведения, пока кулачковая дорожка не приведет в действие возврат этой собачки в положение полной опоры в результате осуществления поворота упомянутой подвижной детали в направлении 32 вплоть до первого крайнего положения P1.
В устройстве, описанном в патенте FR-A-2737263, множество ложементов выполнено в неподвижной детали для размещения в них упругих средств, воздействующих на качающуюся собачку, что усложняет изготовление такой неподвижной детали и не позволяет легко добиться компактной реализации.
В то же время, устройство, описанное в этом патенте FR-A-2737263, содержит множество подлежащих соединению деталей, размеры, конфигурация и материалы которых приводят к высокой стоимости изготовления. Кроме того, известное устройство не обеспечивает желательную надежность и не является компактным.
Технической задачей настоящего изобретения стало создание автоматического устройства индексированной регулировки положения подвижного вала, обладающего высокой надежностью, являющегося компактным и недорогим в производстве.
Кроме того, технической задачей настоящего изобретения явилась разработка способа управления таким устройством.
Техническим результатом настоящего изобретения явилось создание компактного и недорогого устройства, позволяющего также осуществить
- демонтаж подлокотника без использования каких-либо инструментов, причем в том случае, когда подлокотник демонтирован с данного устройства, никакие части устройства не выступают за габариты кресла;
- сборку меньшего количества деталей, по сравнению с предшествующими вариантами реализации;
- симметричный монтаж подлокотника на устройстве, располагающемся справа или слева от кресла, без существенной модификации этого устройства.
Данный технический результат достигается за счет создания автоматического устройства индексированной регулировки положения подвижного вала, вращаемого вокруг оси вращения на детали, неподвижной относительно оси вращения, причем устройство содержит элемент с насечками, качающийся вокруг оси, по существу параллельной упомянутой оси вращения, рампу с насечками, которая образует упоры для упомянутого элемента с насечками, причем эти упоры располагаются на угловом расстоянии вокруг оси вращения, кулачковую дорожку для управления движениями качания элемента с насечками вокруг его оси качания в процессе вращения упомянутого подвижного вала, в котором согласно изобретению неподвижная деталь выполнена в виде первой неподвижной жесткой моноблочной обоймы, имеющей раздельные поверхности, образующие упомянутую рампу с насечками, упомянутую кулачковую дорожку, по меньшей мере, одну опорную поверхность, выполненную с возможностью обеспечения управления вращением вокруг оси вращения подвижной обоймой, удерживающей ось качания упомянутого элемента с насечками.
Предпочтительно первая неподвижная обойма содержит сквозное отверстие, имеющее ось и обеспечивающее возможность прохождения, по меньшей мере, части вала, причем первая неподвижная обойма дополнительно содержит при движении в радиальном направлении от оси к внешнему контуру обоймы первую опорную поверхность, образованную по существу поперечной кольцевой поверхностью, ограниченной изнутри цилиндрическим краем отверстия и ограниченной снаружи цилиндрическим краем с осью, по существу поперечную стенку, являющуюся донной стенкой первой неподвижной обоймы, кулачковую дорожку, являющуюся поверхностью, проходящей по существу перпендикулярно к донной стенке, вторую по существу поперечную опорную поверхность, ограниченную изнутри упомянутой кулачковой дорожкой и ограниченную снаружи кольцевой рампой, имеющей ось и имеющей насечки, третью по существу поперечную опорную поверхность, ограниченную изнутри рампой с насечками и ограниченную снаружи кольцевой стенкой с осью, четвертую по существу поперечную опорную поверхность, ограниченную изнутри упомянутой кольцевой стенкой и ограниченную снаружи внешним контуром.
Предпочтительно кулачковая дорожка содержит две кулачковые полудорожки, по существу симметричные относительно плоскости, перпендикулярной донной стенке.
Предпочтительно устройство дополнительно содержит упругую деталь, смонтированную на первой неподвижной обойме, причем эта упругая деталь содержит наклонную поверхность, управляющую движением качания упомянутого элемента с насечками таким образом, чтобы препятствовать вращению подвижного вала в одном направлении вращения.
Предпочтительно устройство содержит подвижную обойму, выполненную в виде детали, имеющей в целом форму диска, и имеющую сквозное отверстие, обеспечивающее возможность прохождения подвижного вала, средства, обеспечивающие возможность блокировки вращательного движения подвижной обоймы относительно подвижного вала, причем подвижная обойма дополнительно имеет на первой поперечной поверхности штифт, образующий ось качания упомянутого элемента с насечками.
Предпочтительно элемент с насечками, или качающаяся собачка, представляет собой по существу плоскую деталь, имеющую осевое отверстие, обеспечивающее возможность ее установки на упомянутый штифт подвижной обоймы, штифт, выступающий на одной из ее поперечных поверхностей, причем этот штифт образует палец, считывающий профиль кулачковой дорожки в процессе вращения подвижной обоймы относительно первой неподвижной обоймы, насечки на, по меньшей мере, одной первой боковой поверхности, причем эти насечки имеют форму, по существу дополняющую форму насечек, выполненных на рампе с насечками первой неподвижной обоймы.
Предпочтительно элемент с насечками имеет плоскость симметрии системы, причем две поверхности, содержащие насечки, располагаются на его наружной боковой поверхности.
Предпочтительно устройство дополнительно содержит опорную деталь, имеющую ось и механически связанную с подвижной обоймой таким образом, чтобы эта деталь могла быть приведена во вращательное движение вместе с подвижной обоймой в процессе движения подвижного вала, причем опорная деталь удерживает упругое возвратное средство упомянутого элемента с насечками.
Предпочтительно упругое возвратное средство является гибкой пластиной, имеющей упор, причем упомянутый элемент с насечками имеет упор дополняющей формы таким образом, чтобы этот элемент с насечками имел возможность находиться в следующих устойчивых положениях: первое положение, в котором первая поверхность с насечками элемента с насечками упирается в рампу с насечками первой неподвижной обоймы, второе положение, в котором элемент с насечками не находится в контакте с рампой с насечками, причем это их разведение сохраняется при помощи реверсивной блокировки упора относительно дополнительного профиля упругого средства третье положение, в котором вторая содержащая насечки поверхность элемента с насечками упирается в рампу с насечками первой неподвижной обоймы.
Предпочтительно устройство содержит вторую неподвижную обойму, имеющую сквозное отверстие, выполненное с возможностью прохождения подвижного вала, причем эта вторая неподвижная обойма выполнена с возможностью закрепления на первой неподвижной обойме таким образом, чтобы сформировать блок, внутри которого размещена вращающаяся система, образованная подвижной обоймой, элементом с насечками, качающимся на этой подвижной обойме относительно оси, деталью, являющейся опорной для упругого возвратного средства.
Предпочтительно вторая неподвижная обойма закреплена зажимами на первой неподвижной обойме таким образом, чтобы обеспечить удержание упомянутой вращающейся системы.
Предпочтительно упомянутые опорные поверхности первой неподвижной обоймы обеспечивают, после соединения первой и второй неподвижных обойм, для первой опорной поверхности регулировку по вращательному движению оси и блокировку по поступательному движению опорной детали, для второй опорной поверхности упор по меньшей мере части поперечной поверхности элемента с насечками, для третьей опорной поверхности регулировку по вращательному движению оси и блокировку по поступательному движению подвижной обоймы.
Предпочтительно подвижная обойма содержит выступающий на ее поперечной поверхности, располагающейся против второй неподвижной обоймы, штифт, размещающийся в опорном элементе удержания, выполненном в этой второй неподвижной обойме, причем этот штифт образует упор для приведения в действие по меньшей мере одного упругого органа, заключенного в упомянутом опорном элементе.
Предпочтительно опорный элемент удержания представляет собой кольцевую выемку, имеющую ось.
Предпочтительно опорный элемент удержания содержит две пружины, причем вторая пружина имеет жесткость более высокую, чем жесткость первой пружины, и по меньшей мере одна из этих пружин взаимодействует со средством, выполненным с возможностью ограничения деформации первой пружины заданной предельной величиной таким образом, чтобы вращение подвижной обоймы осуществлялось с противодействием этих пружин и чтобы на первом угловом секторе первая пружина сжималась вплоть до упомянутой предельной величины, а затем на втором угловом секторе сжималась уже только одна вторая пружина.
Предпочтительно пружины упираются друг в друга, по меньшей мере, не прямо, на одном из своих концов.
Предпочтительно средство, выполненное с возможностью ограничения деформации первой пружины, представляет собой дугообразный элемент, развернутая длина которого по существу равна длине сжатой первой пружины.
Предпочтительно между первой неподвижной обоймой и подвижной обоймой установлено средство стопорения вращения инерционного типа.
Предпочтительно первая неподвижная обойма содержит по меньшей мере одну направляющую дорожку для катящегося органа, причем боковая поверхность подвижной обоймы содержит по меньшей мере одну полость, выполненную для того, чтобы в определенной относительной ориентации подвижной обоймы по отношению к первой неподвижной обойме частично разместить упомянутый катящийся орган с тем, чтобы он образовал в этом положении препятствие для вращения подвижной обоймы.
Технический результат также достигается за счет того, что способ управления автоматическим устройством индексированной регулировки положения описанного подвижного вала, включающий этап, на котором упомянутый вал удерживается подвижным в первом положении, причем только вращение в первом направлении возможно, исходя из этого положения, и упомянутый элемент с насечками находится в первом положении упора своих насечек в рампу с насечками первой неподвижной обоймы, согласно изобретению включает, по меньшей мере, одно движение вала в первом направлении, начиная от его первого положения и вплоть до некоторого промежуточного положения, находящегося в первом угловом секторе, в котором упомянутый элемент с насечками упирается в насечки упомянутой рампы, при этом движение вала во втором направлении вращения невозможно.
Предпочтительно способ включает, по меньшей мере, одно движение вала в первом направлении вращения, начиная от любого положения в первом угловом секторе до некоторого заданного положения, в котором упомянутый элемент с насечками отведен от рампы с насечками и удерживается на расстоянии от нее при помощи опорного контакта упора с дополнительным упором, выполненным на упругой детали, упомянутый штифт размещен на расстоянии от кулачковой дорожки, причем вращательное движение вала в обоих направлениях вращения является свободным, начиная от упомянутого положения.
Предпочтительно способ включает, по меньшей мере, одно вращательное движение вала в первом направлении, начиная от упомянутого положения, в направлении положения, в котором упомянутый элемент с насечками упирается в рампу с насечками.
Предпочтительно способ включает, по меньшей мере, одно вращательное движение вала в первом направлении, начиная от положения в направлении положения, в котором упомянутый элемент с насечками находится на расстоянии от рампы с насечками и удерживается на удалении от нее в результате контакта между упором и дополнительным упором упругого органа, упомянутый штифт элемента с насечками упирается в кулачковую дорожку.
Предпочтительно способ включает, по меньшей мере, одно вращательное движение вала в первом направлении, начиная от положения и вплоть до положения блокировки, в котором осуществляется упор между второй содержащей насечки поверхностью упомянутого элемента с насечками и рампой с насечками.
Предпочтительно способ используется для регулировки положения подлокотника кресла, в частности кресла автомобильного транспортного средства.
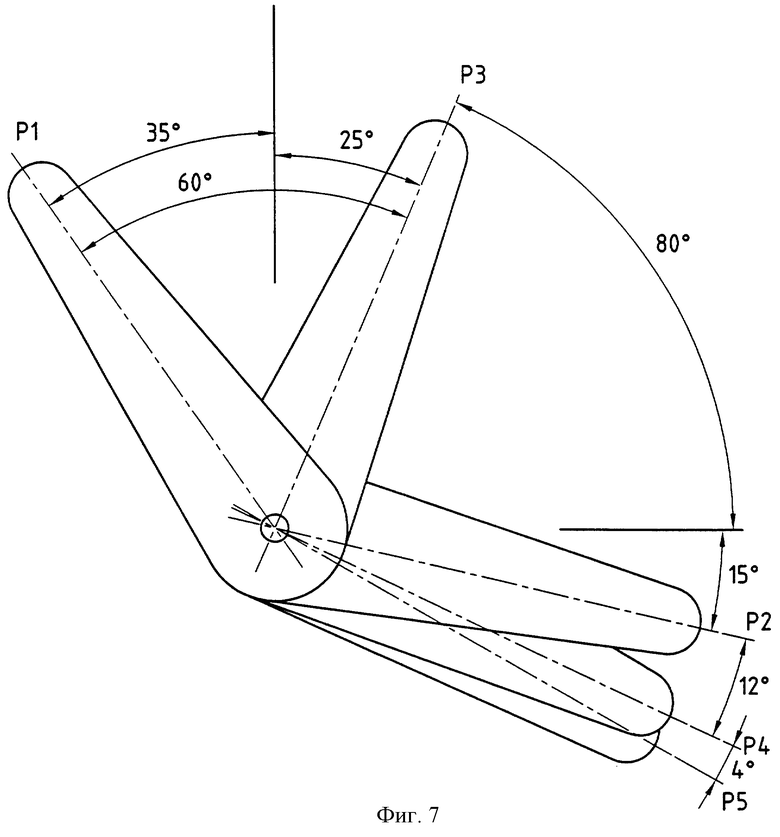
Предпочтительно упомянутое положение соответствует по существу горизонтальному положению подлокотника, положения, дискретно регулируемые, насечка за насечкой, путем вращения вала в первом угловом секторе, ограниченном положением (Р1), включая это положение, и положением (Р3), исключая это положение, соответствуют множеству наклонных положений подлокотника по отношению к горизонтали, причем исключение возможности движения подлокотника в одном направлении позволяет опираться на этот подлокотник в его наклонных положениях, положение (Р2) соответствует по существу вертикальному положению подлокотника, положения (Р4) и (Р5) соответствуют положениям подлокотника, наклоненным под углом, немного превышающим 90° по отношению к положению (P1).
Другие цели и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже описания различных вариантов его реализации со ссылкой на прилагаемые чертежи, на которых
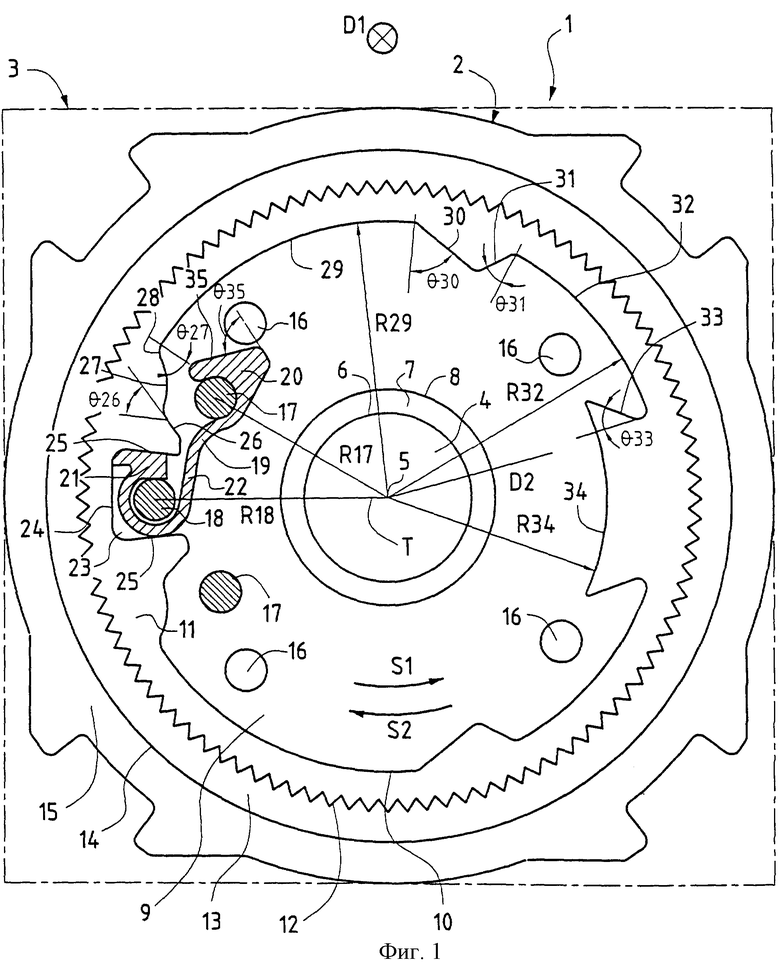
фиг.1 - схематический вид в плане первой неподвижной обоймы блока управления в соответствии с одним из вариантов выполнения предлагаемого изобретения, причем эта неподвижная обойма показана в данном случае на своей внутренней поверхности;
фиг.2 - схематический вид, аналогичный виду, показанному на фиг.1, причем две детали представлены в одном из их положений функционирования по отношению к первой неподвижной обойме;
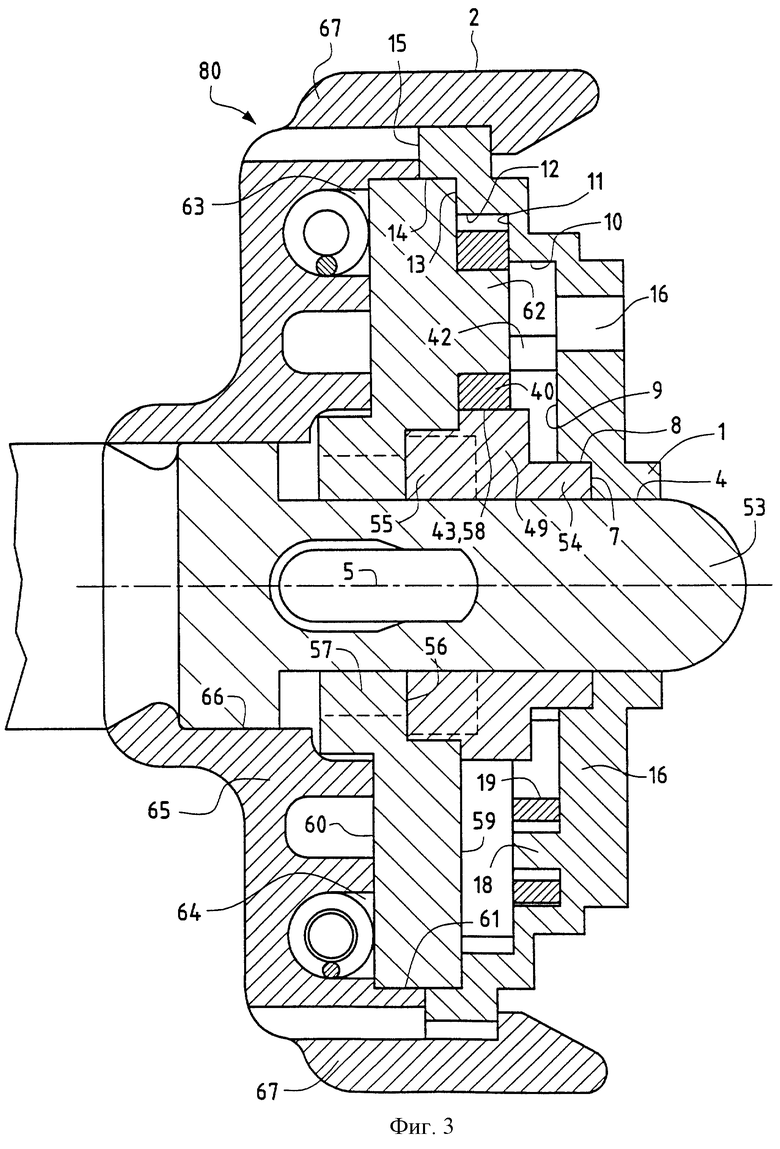
фиг.3 - схематический вид в поперечном разрезе блока в соответствии с одним из вариантов выполнения предлагаемого изобретения;
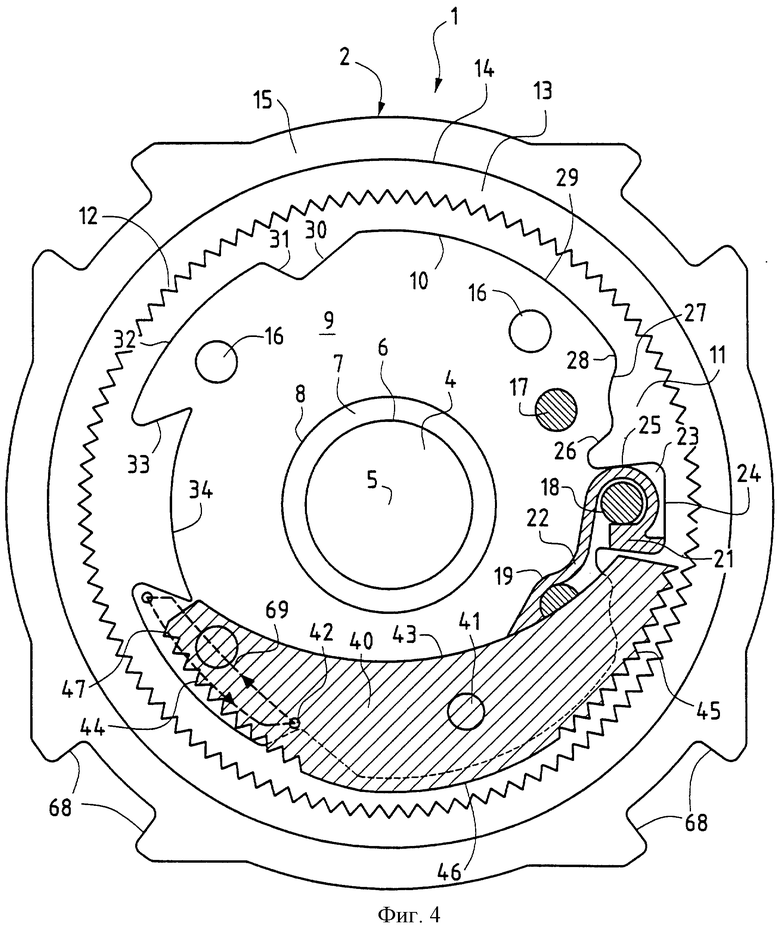
фиг.4 - схематический вид, аналогичный виду, показанному на фиг.2, причем здесь подвижная собачка показана в положении ее отведения от рампы с насечками первой неподвижной обоймы;
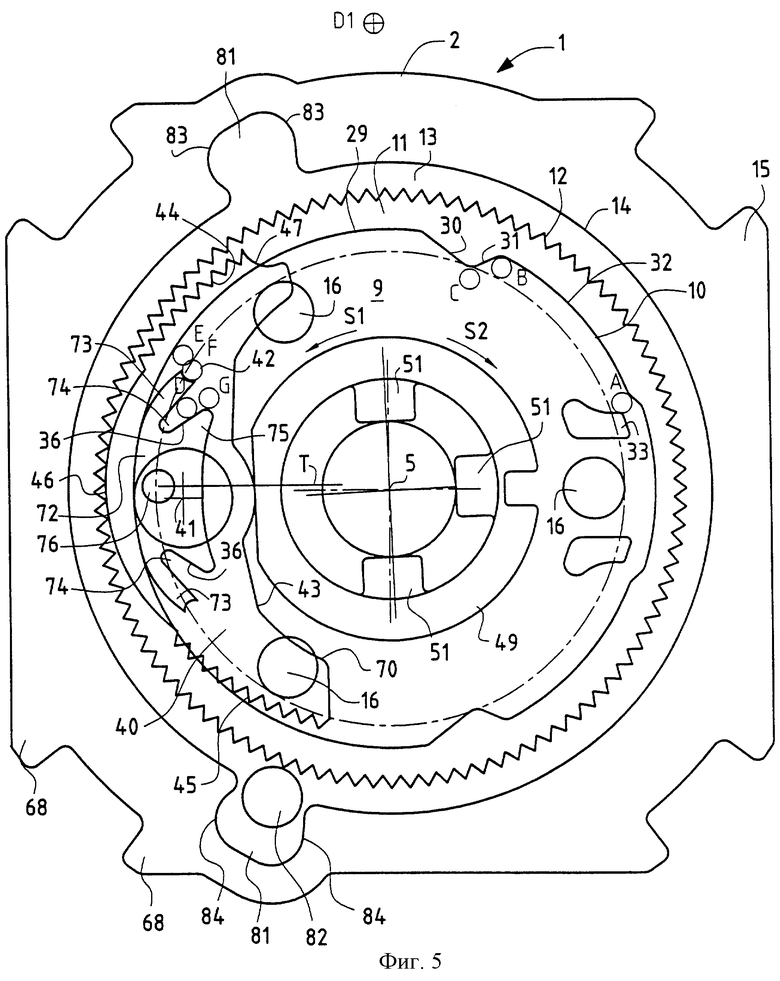
фиг.5 - схематический вид, аналогичный виду, показанному на фиг.1, второго способа реализации первой неподвижной обоймы;
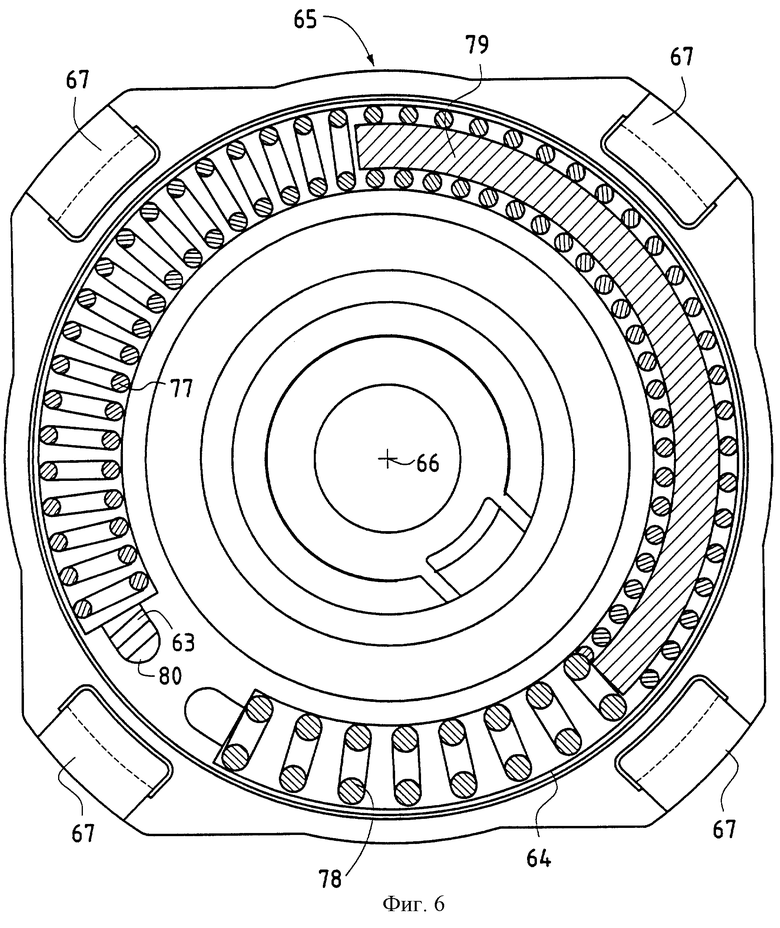
фиг.6 - схематический вид в плане варианта выполнения второй неподвижной обоймы блока управления в соответствии с предлагаемым изобретением, причем эта вторая неподвижная обойма показана на своей внутренней поверхности;
фиг.7 - схематический вид сбоку подлокотника, смонтированного на устройстве в соответствии с предлагаемым изобретением, показанном на фиг.1-6, причем этот подлокотник показан в своих положениях Р1, Р2, Р3, Р4 и Р5, которые будут определены в последующем изложении, а величины угловых расстояний между этими положениями приведены в данном случае только в качестве примера.
Прежде всего будет рассмотрена фиг.1, на которой в плане схематически представлена первая, по существу моноблочная и жесткая неподвижная обойма 1 блока управления в соответствии с предлагаемым изобретением.
На фиг.1 показана внутренняя поверхность этой первой обоймы 1, которая может быть изготовлена из материала, выбранного, в зависимости от предполагаемого применения, из группы материалов, содержащей полимерные материалы и металлические сплавы, например стальные или алюминиевые сплавы.
В представленном здесь способе реализации внешний контур 2 этой первой неподвижной обоймы 1, как это можно видеть на фиг.1, по существу вписывается в квадратную огибающую 3. Однако очевидно, что этот контур может иметь и другую форму, такую, чтобы он мог быть вписан в огибающую круглой, овальной, прямоугольной или многоугольной формы.
Эта первая обойма 1 содержит сквозное отверстие 4 с осью 5, по существу параллельной направлению D1, перпендикулярному плоскости чертежа на фиг.1.
В последующем описании этой первой обоймы 1:
- термин “поперечный” будет использоваться по отношению к плоскостям, параллельным плоскости чертежа на фиг.1;
- термины “осевой” и “продольный” будут использоваться по отношению к оси 5;
- термины “радиальный” и “радиус” будут использоваться по отношению к направлениям D2, перпендикулярным оси 5;
- термины “внутренний” и “наружный” будут использоваться в функции соответствующих относительных расстояний от оси 5.
В представленном здесь способе реализации ось 5 размещается по существу в центре квадратной огибающей 3.
В других способах реализации, не показанных на приведенных чертежах, эта ось 5 может быть смещена относительно центра огибающей, в которую вписан внешний контур 2 этой первой неподвижной обоймы 1.
Используя в качестве отправной точки ось 5 и перемещаясь в радиальном направлении наружу по отношению к первой неподвижной обойме 1 или в сторону ее внешнего контура 2, на этом пути последовательно встречают:
- цилиндрический край 6 сквозного отверстия 4, имеющего ось 5;
- первую опорную поверхность 7, образованную по существу поперечной кольцевой поверхностью, ограниченной изнутри упомянутым цилиндрическим краем 6 и ограниченной снаружи цилиндрическим краем 8 с осью 5;
- по существу поперечную стенку, образующую донную стенку 9 первой неподвижной обоймы 1;
- кулачковую дорожку 10, образованную поверхностью, проходящей по существу перпендикулярно к донной стенке 9 первой неподвижной обоймы 1;
- вторую, по существу поперечную опорную поверхность 11, ограниченную изнутри упомянутой кулачковой дорожкой 10 и ограниченную снаружи кольцевой рампой 12, имеющей ось 5 и снабженной насечками;
- третью, по существу поперечную опорную поверхность 13, ограниченную изнутри упомянутой рампой 12 с насечками и ограниченную снаружи кольцевой стенкой 14 с осью 5;
- четвертую, по существу поперечную опорную поверхность 15, ограниченную изнутри упомянутой кольцевой стенкой 14 и ограниченную снаружи внешним контуром 2.
Используя теперь в качестве отправной точки первую из упомянутых опорных поверхностей 7 и двигаясь в радиальном направлении в сторону внешнего контура 2, встречают на этом пути, таким образом, еще несколько дискретных или раздельных опорных поверхностей 11, 13, 15 для первой неподвижной обоймы, причем эти опорные поверхности 11, 13, 15 являются по существу параллельными донной стенке 9.
Согласно представленному здесь способу реализации в этой донной стенке 9 выполнены четыре сквозных резьбовых отверстия 16, располагающихся по существу в продольном направлении и обеспечивающих возможность крепления при помощи винтового соединения первой неподвижной обоймы 1 на основании типа, например, спинки автомобильного кресла, не показанной на приведенных чертежах.
В других способах реализации, не представленных на чертежах, это крепление первой неподвижной обоймы 1 на основании выполняется при помощи средств, выбранных из группы средств, содержащей болтовое крепление, крепление при помощи заклепок, крепление сваркой, приклеивание или любое другое эквивалентное средство.
На донной стенке 9 размещены выступающие по существу в осевом направлении по меньшей мере два штифта 17, 18, на которых зажимами закрепляется упругая деталь 19.
Расположение упомянутых штифтов 17, 18 и упругой детали 19 будет более подробно описано ниже со ссылками на способ реализации, представленный на фиг.1.
Эта упругая деталь 19 может быть изготовлена из материала, выбранного из группы материалов, имеющей в своем составе различные металлические сплавы и полимерные материалы.
Упомянутые штифты 17, 18 выступают на высоту в осевом направлении, меньшую или равную высоте в этом направлении упомянутой кулачковой дорожки 10.
В варианте реализации, представленном на фиг.1, три штифта 17, 18 позволяют обеспечить монтаж упомянутой упругой детали 19 в двух различных конфигурациях, симметричных по отношению к плоскости Т, содержащей направление D2 и перпендикулярной плоскости чертежа на фиг.1.
На приведенных в приложении чертежах представлена только одна из этих конфигураций монтажа упругой детали 19.
В других вариантах реализации, не представленных на чертежах, имеются только два штифта 17, 18 и вследствие этого оказывается возможной только одна конфигурация расположения упругой детали 19.
В варианте реализации, представленном на фиг.1, ближние штифты 17 располагаются на радиусе R17, величина которого меньше величины радиуса R18, на котором располагается третий, периферийный штифт 18.
Упругая деталь 19 располагается на осевой высоте, величина которой меньше или равна высоте кулачковой дорожки 10.
Эта упругая деталь 19 имеет на каждой из своих концевых частей форму крюка, прижатого к части боковой поверхности штифтов 17, 18.
В том случае, когда упомянутая упругая деталь 19 находится в своем недеформированном состоянии, как это показано на фиг.1, ее первая концевая часть 20 прижата к части боковой поверхности ближнего штифта 17. Другая концевая часть 21 этой упругой детали 19 всегда удерживается прижатой к части боковой поверхности периферийного штифта 18.
Между двумя относительно толстыми концевыми частями 20, 21 упомянутая упругая деталь 19 содержит промежуточный сегмент 22, толщина которого возрастает в направлении от первой концевой части 20 ко второй концевой части 21.
Первая часть этого промежуточного сегмента 22 является по существу концентрической и располагается на некотором расстоянии по отношению к периферийному штифту 18.
Вторая часть этого промежуточного сегмента 22 проходит между периферийным штифтом 18 и ближним штифтом 17 и имеет кривизну, вогнутость которой обращена в направлении внутрь.
Периферийный штифт 18 размещен в выемке 23 с выходным отверстием, ориентированным в направлении оси 5, ограниченной кривизной кулачковой дорожки 10.
В представленном здесь варианте реализации эта выемка 23 имеет поперечный профиль, содержащий:
- стенку основания 24, выполненную по существу в виде дуги окружности, имеющей ось 5;
- две боковые стенки 25, проходящие по существу в радиальном направлении.
Выходное отверстие выемки 23 имеет, таким образом, меньшие размеры, чем стенка ее основания 24.
В представленном здесь варианте реализации первая часть промежуточного сегмента 22 упругой детали 19 не упирается в боковую стенку 25 выемки 23, зато вторая концевая часть 21 этой детали 19 блокируется в своем исходном положении при помощи тройного упора:
- в боковую стенку 25 выемки 23;
- в стенку основания 24 выемки 23;
- в боковую поверхность периферийного штифта 18.
Таким образом, эта упругая деталь 19 удерживается в своем исходном положении на своей второй концевой части 21.
Зато ее первая концевая часть 20 не удерживается в своем исходном положении по отношению к ближнему штифту 17, причем вследствие этого данная упругая деталь 19 может быть подвергнута упругой деформации и эта деформация соответствует повороту этой упругой детали 19 относительно оси, по существу образуемой периферийным штифтом 18.
Преимущество такой упругой деформации будет пояснена в последующем изложении.
Первая неподвижная обойма 1, на которой закреплена упомянутая упругая деталь 19, обладает, если рассматривать ее в плоскости фиг.1, симметрией по отношению к определенной выше плоскости Т.
Теперь, принимая во внимание эту симметрию, более подробно и полно будет описана кулачковая дорожка 10.
Используя в качестве отправной точки боковую стенку 25 выемки 23 и перемещаясь от этой отправной точки вдоль упомянутой кулачковой дорожки 10 в окружном направлении по часовой стрелке, на этом пути встречают:
- соединительное закругление, предназначенное для стыковки с первой плоской поверхностью 26, наклоненной на угол Θ26 к радиусу;
- вторую плоскую поверхность 27, наклоненную под углом Θ27 к радиусу;
- третью плоскую поверхность 28, наклоненную под углом Θ28 к радиусу;
- первый угловой сектор 29, выполненный в виде дуги окружности с осью 5, имеющей радиус R29;
- четвертую плоскую поверхность 30, наклоненную под углом Θ30 к радиусу;
- пятую плоскую поверхность 31, наклоненную под углом Θ31 к радиусу;
- второй угловой сектор 32, выполненный в виде дуги окружности с осью 5, имеющей радиус R32, по существу равный радиусу R29, определенному выше;
- шестую плоскую поверхность 33, наклоненную под углом Θ33 к радиусу;
- третий угловой сектор 34 в виде дуги окружности, проходящий на радиусе R34, величина которого меньше, чем величина радиуса R29, определенного выше.
В рассматриваемом способе реализации угол Θ26 имеет величину порядка 15°, угол Θ27 имеет величину порядка 80°, угол Θ28 имеет величину порядка 45°, угол Θ30 имеет величину порядка 50°, угол Θ31 имеет величину порядка 15° и угол Θ33 имеет величину порядка 45°.
Специалист в данной области техники без труда уточнит величины перечисленных выше углов, принимая во внимание функции, выполняемые кулачковой дорожкой 10, о которых более подробно будет сказано в последующем изложении.
Теперь более подробно будет рассмотрена фиг.2, на которой схематически представлена в своем первом положении качающаяся собачка 40, являющаяся подвижной относительно оси ее качания 41, причем эта ось качания 41 может быть приведена во вращательное движение относительно оси 5.
В рассматриваемом здесь варианте реализации качающаяся собачка 40 представляет собой по существу плоский элемент, проходящий в поперечном направлении на первой неподвижной обойме 1 и имеющий в целом форму полумесяца.
Толщина этой качающейся собачки 40 в осевом направлении имеет величину, меньшую или равную толщине упомянутой выше рампы с насечками 12.
По меньшей мере, часть поперечной поверхности этой качающейся собачки 40 опирается на вторую опорную поверхность 11 в процессе всех перемещений, возможных для этой собачки 40.
Качающаяся собачка 40 снабжена на одной из своих поперечных поверхностей штифтом 42, выступающим от этой поверхности по существу в осевом направлении.
Таким образом, как это будет показано более наглядно в последующем изложении, этот штифт 42 представляет собой палец считывания траектории кулачковой дорожки 10.
Для того, чтобы облегчить понимание приведенных в приложении чертежей, подвижная обойма, на которой располагается эта качающаяся собачка 40, не показана на фиг.2.
Качающаяся собачка 40 содержит плоскость симметрии системы S, которая проходит перпендикулярно по отношению к плоскости чертежа, представленного на фиг.2.
Внешний контур собачки 40, по существу перпендикулярный плоскости чертежа, показанного на фиг.2, содержит:
- искривленную поверхность 43, образующую большую внутреннюю кромку этой собачки;
- две поверхности с насечками 44, 45, располагающиеся на большой наружной кромке и отделенные друг от друга искривленной поверхностью 46;
- упор 47, располагающийся на по меньшей мере одной из двух боковых кромок, связывающих между собой внутреннюю и наружную кромки этой собачки 40.
Насечки, нанесенные на поверхности 44, 45, имеют форму, дополняющую форму насечек на рампе 12.
В своем положении, представленном на фиг.2, штифт 42 качающейся собачки 40 размещается на относительно небольшом расстоянии от поверхностей 32, 33 кулачковой дорожки 10 и насечки, выполненные на первой поверхности 44 собачки 40, опираются на аналогичные насечки, выполненные на рампе 12.
Это удержание в состоянии опоры обеспечивается при помощи упругого средства 48, в качестве которого может быть использована, например, пружинная пластина, удерживаемая деталью 49, вращающейся одновременно с подвижной обоймой 57, на которой закреплена качающаяся собачка 40.
Если исходить из положения, схематически представленного на фиг.2, качающаяся собачка 40 может быть приведена во вращательное движение относительно оси 5 только в одном направлении, обозначенном здесь стрелкой S1.
Теперь со ссылками на фиг.3 и последующие фигуры будет описан монтаж блока в целом.
Опорная деталь 49 снабжена центральным сквозным отверстием 50, боковая поверхность которого в рассматриваемом здесь варианте реализации снабжена продольными выступами 51, предназначенными для взаимодействия с соответствующими канавками 52 подвижного вала 53, имеющего ось 5.
В другом варианте реализации боковая поверхность сквозного центрального отверстия 50 может быть снабжена средствами упругого зажима вала 53 таким образом, чтобы ослабить стуки, дребезжание и другие звуки, связанные с наличием в этом устройстве функциональных зазоров.
Упомянутая опорная деталь 49 содержит:
- первую крайнюю кольцевую часть 54, входящую в упор в условиях вращения с первой опорной поверхностью 7 неподвижной обоймы 1;
- вторую крайнюю часть 55, входящую в неподвижный упор с центральной опорной поверхностью 56, имеющей ось 5, подвижной обоймы 57;
- продольную боковую поверхность 58, остающуюся в любой точке, по меньшей мере, немного отстоящей от внутренней кромки 43 собачки 40.
Подвижная обойма 57 представляет собой качающуюся, или совершающую колебания деталь, или среднюю деталь блока.
В рассматриваемом здесь варианте реализации эта подвижная обойма 57 представляет собой сплошную деталь, снабженную двумя поперечными поверхностями 59, 60, причем кольцевая продольная кромка 61, имеющая ось 5, связывает между собой две эти поверхности 59 и 60.
Крайняя боковая кромка первой поперечной поверхности 59 упирается в третью опорную поверхность 13, причем продольная кольцевая кромка 61 упирается в кольцевую стенку 14 первой неподвижной обоймы 1.
На этой первой поперечной поверхности 59 располагается, выступая в продольном направлении, штифт 62, образующий ось качания собачки 40.
На второй поперечной поверхности 60 подвижной обоймы располагается, выступая в продольном направлении, штифт 63, оказывающийся размещенным, в том случае, когда блок ВО находится в смонтированном положении, в кольцевой выемке 64 второй неподвижной обоймы 65.
В этой кольцевой выемке 64 располагаются упругие средства типа пружин, функция которых будет подробно описана в последующем изложении.
Подвижная обойма 57 содержит сквозное центральное отверстие, имеющее ось 5, кольцевая кромка которого снабжена продольными выступающими элементами, предназначенными для того, чтобы упираться в канавки 52 вала 53.
Вторая неподвижная обойма 65 снабжена сквозным отверстием 66, обеспечивающим возможность прохождения вала 53.
В рассматриваемом здесь варианте реализации вторая неподвижная обойма 65 представляет собой контрдеталь, закрепленную зажимами на первой неподвижной обойме 1 при помощи четырех упругих лапок 67, причем эта вторая неподвижная обойма 65 изготовлена из полимерного материала путем литья под давлением или формовки.
Упоры 68, предусмотренные на внешнем контуре 2 неподвижной обоймы 1, позволяют исключить возможность относительного перемещения двух неподвижных обойм 1, 65, в частности, вращения относительно оси 5.
Другие средства соединения двух неподвижных обойм 1, 65 также могут быть предусмотрены в дополнение или вместо и на месте упомянутых лапок 67, в частности, в том случае, когда вторая неподвижная обойма 65 является металлической.
Эта вторая неподвижная обойма 65 снабжена опорной поверхностью стопорения по поступательному движению и направления по вращательному движению подвижной обоймы 57.
Теперь будет описано функционирование блока ВО, исходя из положения собачки 40, представленного на фиг.2. Это положение соответствует положению Р1, для которого вал 23 может поворачиваться только в одном направлении S1.
Ручное воздействие на этот вал 53 в направлении вращения S1 вызывает приведение во вращательное движение подвижной обоймы 57 и, следовательно, вращение относительно оси 5:
- опорной детали 49 в неподвижном упоре при помощи пальца в опорную поверхность 56;
- качающейся собачки 40, смонтированной на штифте 62.
В процессе этого вращения насечки первой насеченной поверхности 45 качающейся собачки 40 переводятся в направлении насечек рампы 12 всякий раз под действием упругих средств 48.
Таким образом, начиная от положения Р1, представленного на фиг.2, вращение вала 53 приводит к движению, насечка за насечкой, качающейся собачки 40, пока штифт 42 проходит второй угловой сектор 32.
Переход от одной насечки к другой в результате вращения в направлении S1 связан с качанием собачки 40, причем движение в обратном направлении вращения S2 является невозможным для каждого последующего полученного положения.
В качестве примера можно отметить, что регулировка по нарастающей при изменении положения на угол 40° может быть обеспечена с шагом примерно от 4 до 5°.
После того, как штифт 42 достигает поверхности 31 кулачковой дорожки 10, собачка 40 приводится во вращательное движение вокруг оси, определяемой штифтом 62, таким образом, что первая поверхность с насечками 44 собачки 40 отводится от рампы с насечками 12. Удержание в этом отведенном положении обеспечивается в результате движения упора 47 собачки 40 на упругом средстве 48.
При этом собачка 40 располагается так, как это показано на фиг.4, и вал 53 устанавливается в положение Р3.
Таким образом, в этом случае оказывается возможным свободно поворачивать вал 53 в обоих направлениях S1 или S2 для того, чтобы:
- либо вернуться к положению Р1, определенному выше, причем в этом случае штифт 42 собачки 40 двигается вдоль некоторой первой траектории, такой, например, которая обозначена позицией 69 на фиг.4. При этом контакт штифта 42 с шестой поверхностью 33 кулачковой дорожки 10 вызывает возврат собачки 40 в ее положение, показанное на фиг.2;
- либо перейти к положению Р2, в котором вращение в направлении S1 остается возможным, тогда как вращение в направлении S2 не допускается.
Это положение Р2 достигается в том случае, когда штифт 42 входит в контакт с наклонной поверхностью 35, ограничивающей первую крайнюю часть 20 детали 19.
Вследствие угла наклона Θ35 этой поверхности 35, измеренного по отношению к радиусу, и вследствие соответствующей длины этой поверхности 35 собачка 40 фактически принуждается к возврату в положение упора ее первой поверхности с насечками 44 в рампу с насечками 12.
Таким образом, обеспечивается блокировка вращательного движения вала 53 по тем же причинам, что и в процессе шагового перемещения, насечка за насечкой, в диапазоне между положениями Р1 и Р3.
Если, начиная от этого положения Р2, вращают вал 53 в направлении S1, штифт 42 собачки 40 входит в контакт со второй поверхностью 27, следствием чего оказывается установка собачки 40 в положение отведения от рампы 12 аналогично тому, как это было описано выше для процесса перехода штифта 42 на поверхность 31.
При этом вал 53 оказывается в положении Р4.
Используя в качестве отправной точки это положение Р4, имеется возможность:
- обратно перевести вал 53 в положение Р1 в результате его свободного вращения в направлении S2;
- перевести вал 53 в крайнее положение Р5 в результате его свободного поворота с небольшой амплитудой в направлении S1.
Это положение Р5 соответствует следующей совокупности признаков, обеспечивающих конец рабочего хода, в том числе, в случае приложения значительного усилия в направлении вращения S1: контакт между штифтом 42 качающейся собачки 40 и первой поверхностью 26 кулачковой дорожки 10, который позволяет обеспечить упор второй поверхности с насечками 45 этой собачки 40 в рампу с насечками 12.
В качестве варианта реализации кулачковая дорожка 10 может быть снабжена в конце первой поверхности 26 упором конца рабочего хода.
Используя в качестве отправной точки положение Р5 и вращая вал в направлении S2, возврат в положение Р4 приводит к отведению друг от друга поверхностей с насечками собачки 40 и рампы 12, причем это состояние отведения поддерживается при помощи упругого средства 48.
Разблокирование из положения Р2 обеспечивается, например применительно к подлокотнику автомобильного кресла, путем расцепления качающейся собачки 40 вследствие воздействия на подлокотник толкающего усилия в направлении назад, причем это положение Р2 по существу соответствует расположению подлокотника на одной линии со спинкой кресла.
В общем случае упомянутая качающаяся собачка может быть установлена в трех различных устойчивых состояниях:
- в первое состояние, в котором первая поверхность с насечками 44 этой качающейся собачки 40 упирается в рампу с насечками 12 первой неподвижной обоймы 1. Это первое состояние представляет собой состояние устойчивых положений, заключенных в диапазоне от положения Р1, включая само это положение, до положения Р3, исключая само это положение, и соответствует также положению Р2;
- во второе состояние, в котором упомянутая собачка не находится в контакте с рампой 12, содержащей насечки, причем это их разведение сохраняется при помощи поддающейся реверсированию блокировки упора 47 собачки 40 на части профиля упругого средства 48. Это второе состояние соответствует положениям Р3 и Р4 вала 53;
- в третье состояние, в котором вторая, содержащая насечки поверхность 45 собачки 40 находится в упоре в содержащую насечки рампу 12 первой неподвижной обоймы 1. Это третье состояние соответствует крайнему положению Р5.
Между положениями Р1 и Р3 или, например, на угловом расстоянии примерно в 40°, регулировка угла поворота вала 53 возможна последовательно, насечка за насечкой, причем переход от одной насечки к другой обеспечивается при помощи небольшого отклонения собачки 40.
Такой переход от одной насечки к другой может соответствовать, например, углу поворота примерно от 4 до 5°.
Полный ход от положения Р1 до положения Р5 может соответствовать, например, углу поворота примерно на 140°, причем положения Р4 и Р5 отстоят друг от друга на угол величиной всего в несколько градусов.
В рассматриваемом здесь варианте реализации упомянутая рампа с насечками 12 снабжена насечками, по существу идентичными друг другу на всем ее протяжении, а кулачковая дорожка 10 содержит две кулачковые полудорожки, симметричные по отношению к плоскости Т, причем в данном случае используется только одна такая кулачковая полудорожка.
В других вариантах реализации, не представленных на приведенных в приложении чертежах, насечки, располагающиеся на полуокружности рампы с насечками 12, соответствующей одной кулачковой полудорожке, отличаются от насечек, располагающихся на другой полуокружности этой рампы, таким образом, чтобы обеспечить возможность, например, монтажа данного устройства с двумя величинами углового отклонения между насечками в соответствии с используемой в данном случае кулачковой полудорожкой.
В таких вариантах реализации и в том случае, когда собачка 40 обладает двумя поверхностями, содержащими насечки, вторая ее поверхность с насечками очевидно адаптирована для вхождения в упор в рампу с насечками 12 при необходимости в том случае, когда достигнуто положение Р5.
Возможны также такие варианты реализации, не показанные на приведенных в приложении фигурах, в соответствии с которыми насечки на рампе 12 присутствуют только в зонах, соответствующих положениям от Р1 до Р3, Р2 и Р5.
Возможны и другие варианты реализации, не показанные на приведенных в приложении фигурах, в соответствии с которыми две кулачковые полудорожки не являются симметричными или же первая неподвижная обойма содержит только одну кулачковую дорожку, причем эта кулачковая дорожка проходит на угловом секторе, превышающем по величине угловой сектор расположения описанной выше кулачковой полудорожки.
Возможны также варианты реализации, в соответствии с которыми деталь из полимерного материала, закрепленная на первой неподвижной обойме 1, образует по меньшей мере часть кулачковой дорожки 10.
Теперь будет рассмотрена фиг.5, на которой проиллюстрирован другой вариант реализации первой неподвижной обоймы 1.
На этой фиг.5 элементы, аналогичные уже описанным выше элементам, обозначены теми же самыми цифровыми позициями. Для упрощения чертежа, представленного на фиг.5:
- упругое средство 48 не показано;
- упругая деталь 72 представлена сплошной линией, хотя она и располагается под качающейся собачкой 40, штифт 42 которой размещен в положении, обозначенном позицией F.
Формы этой упругой детали 72 и выполняемые ею функции будут подробно описаны в последующем изложении.
На фиг.5 позициями А, В, С, D, Е и F обозначены соответствующие положения штифта 42 собачки 40 по отношению к кулачковой дорожке 10.
Положение А аналогично положению, описанному выше со ссылками на фиг.2, и связано с положением Р1.
Положение С соответствует положению Р3 вала 53.
В том случае, когда штифт 42 проходит кулачковую дорожку от точки А до точки В (второй угловой сектор 32), собачка 40 преодолевает зубцы рампы с насечками 12 первой обоймы, что позволяет обеспечить шаговую регулировку по нарастающей углового положения вала 53.
Переход штифта 42 из точки В в точку С влечет за собой отведение зубцов собачки 40 от рампы с насечками 12 и вал 53 при этом оказывается свободным по вращательному движению в направлении S1 или S2 аналогично тому, как это было описано выше со ссылками на фиг.1-4.
Начиная от положения Р3 (точка С), поворот вала 53 в направлении S1 приводит к установлению контакта в точке D между штифтом 42 и наклонной поверхностью 36 упругой детали 72, причем штифт 42 проходит затем до дна выемки 74. В этом положении насечки собачки 40 не находятся в контакте с рампой с насечками 12 и упругое средство 48 оказывает давление на собачку 40.
Эта упругая деталь 72 образует гибкий кулачок и может быть изготовлена из материала, выбранного из группы материалов, содержащей металлические сплавы и полимерные материалы.
Если, начиная от этого положения на дне выемки 74, вал 53 вращают в направлении S2, гибкость ветви 73 упругой детали 72 позволяет штифту 42 собачки 40 перейти в положение Е, в котором первая поверхность с насечками 44 собачки 40 входит в упор в рампу с насечками 12.
При этом вал 53 устанавливается в положение Р2.
Начиная от положения Р2 (точка Е), поворот вала 53 в направлении 31 приводит к перемещению штифта 42, в результате освобождения сектора с насечками 44, из его положения Е в положение F, а затем и в положение G, соответствующее положению Р5 для вала 53.
Поворот в направлении S1 за пределы этого положения Р5 не допускается при помощи механизма, аналогичного тому, который был описан выше со ссылками на фиг.1-4, а именно при помощи контакта между второй поверхностью с насечками 45 собачки 40 и рампой с насечками 12.
В варианте реализации, схематически представленном на фиг.5, эта образующая гибкий кулачок упругая деталь 72:
- закрепляется на первой неподвижной обойме 1 путем установки на штырь 76, выступающий на донной стенке 9;
- обладает плоскостью симметрии, совпадающей с плоскостью симметрии совокупности Т первой неподвижной обоймы 1.
В других вариантах реализации, не показанных на приведенных в приложении фигурах, эта деталь 72 не является симметричной по отношению к плоскости Т и/или первая неподвижная обойма 1 не имеет такой плоскости симметрии Т.
Теперь со ссылками на фиг.6 будут описаны упругие средства, располагающиеся в выемке 64 второй неподвижной обоймы 65.
Как уже было сказано выше, штырь или штифт 63 подвижной обоймы 57 имеет возможность перемещения в этой выемке 64 в процессе вращения вала 53.
В процессе своего движения этот штифт 63 стремится сжать упругие средства, размещенные в выемке 64.
В рассматриваемом здесь варианте реализации эти упругие средства содержат первую и вторую спиральные пружины сжатия 77, 78, установленные последовательно, то есть встык друг за другом, таким образом, чтобы находиться в упоре, по меньшей мере косвенном, на одном из своих концов.
Первая из этих пружин 77 проходит, в состоянии покоя, на угловом секторе, величина которого превышает величину углового сектора, на котором проходит, также в состоянии покоя, вторая пружина 78.
Первая пружина 77, имеющая жесткость меньшую, чем жесткость второй пружины 78, содержит изогнутый стержень 79, размещенный внутри ее витков.
Этот стержень 79 имеет такой диаметр, чтобы он не мог войти в пространство внутри витков второй пружины 78.
Штифт 63, в том случае, когда вал 53 находится в своем положении Р1, размещается в гнезде 80 выемки 64.
Под действием поворота вала 53 в направлении S1 обеспечивается сжатие первой пружины 77 вплоть до того состояния, когда витки этой первой пружины 77 окажутся почти прилегающими друг к другу, причем это состояние по существу соответствует той длине сжатой первой пружины, которая равна длине стержня 79.
В том случае, когда после достижения этого состояния сжатия первой пружины 77 вращение вала 53 в направлении S1 продолжается, стержень 79 стремится сжать вторую пружину 78, имеющую более высокую жесткость.
Таким образом, момент, приложенный к валу 53, не приводит к повреждению первой пружины 77.
Пружины 77, 78 и выемка 64 располагаются таким образом, чтобы вращательное движение вала 53 из его положения Р1 в положение Р5 осуществлялось в результате преодоления возрастающего возвратного усилия, достигающего своего максимального значения в положении Р5.
Описанный выше блок управления ВО может быть использован, в частности, для регулировки положения подлокотников кресел, например, автомобильных сидений.
В случае такого его применения:
- первая пружина 77 может быть установлена для противодействия, с некоторым первым упругим сопротивлением, перемещению подлокотника из его крайнего нижнего положения Р1, в частности, близкого к горизонтальному, в его верхнее положение, а также для содействия возврату этого подлокотника в его крайнее нижнее положение Р1;
- что касается второй пружины 78, то она может быть установлена для противодействия, с некоторым дополнительным упругим сопротивлением, вращению подлокотника в направлении S1 таким образом, чтобы:
сформировать ориентир, указывающий пользователю на непосредственное приближение блокировки подлокотника в его верхнем положении Р4;
противодействовать, со значительным упругим сопротивлением, перемещению этого подлокотника в крайнее положение Р5 разблокирования.
В варианте реализации, представленном на фиг.5, первая обойма 1 снабжена двумя ложементами 81, в каждом из которых может быть установлено средство стопорения по вращательному движению 82 инерционного типа.
Применительно к подлокотникам автомобильных кресел это стопорение по вращательному движению при помощи средств 82 может соответствовать поднятому положению подлокотника.
В этом случае функция упомянутых средств 82 состоит в том, чтобы не допустить самопроизвольного возврата подлокотника в его горизонтальное положение в результате резкого торможения автомобиля.
В представленном здесь варианте реализации ложементы 80, 81 снабжены боковыми стенками 83, 84, на которых предусмотрены пластмассовые упоры (на приведенных в приложении фигурах не показаны), образующие направляющую дорожку для катящегося органа 82 типа шарика, причем эти пластмассовые упоры позволяют обеспечить симметрию этих направляющих дорожек по отношению к оси симметрии, располагающейся вдоль спинки кресла или под углом порядка 20-25° по отношению к вертикали.
Периферийная цилиндрическая поверхность подвижной обоймы 57 снабжена по меньшей мере одной полостью, выполненной для того, чтобы, в определенной ориентации этой подвижной обоймы 57, предотвратить ее вращение.
Блок управления описанного выше типа оказывается весьма надежным и весьма компактным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ОТВОДНЫМ ВЫСТРЕЛИВАНИЕМ | 2009 |
|
RU2493789C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С БЛОКИРУЕМОЙ СИСТЕМОЙ ВЫСТРЕЛИВАНИЯ | 2009 |
|
RU2492820C2 |
| РАБОЧИЕ ОРГАНЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2497464C2 |
| ОДНОРАЗОВЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2492818C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| Кресло и опорные структуры | 2012 |
|
RU2625225C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ТРАНСМИССИЯ С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ СКОРОСТИ | 2000 |
|
RU2267671C2 |

Изобретение относится к области автомобилестроения, а именно к устройствам, регулирующим положения подлокотников автомобильных кресел. Устройство содержит элемент с насечками, качающийся вокруг оси, по существу параллельной оси вращения, рампу с насечками, которая определяет упоры для элемента с насечками. Эти упоры располагаются в угловом отношении вокруг оси вращения. Кулачковая дорожка предназначена для управления движениями качания элемента с насечками вокруг его оси качания в процессе вращения подвижной детали. Устройство содержит первую неподвижную жесткую моноблочную обойму, снабженную множеством раздельных поверхностей, образующих упомянутую рампу с насечками, упомянутую кулачковую дорожку и по меньшей мере одну опорную поверхность, способную обеспечить регулирование положения подвижного вала по вращательному движению относительно оси вращения подвижной обоймы, удерживающей ось качания упомянутого элемента с насечками. Технический результат - повышение надежности и компактности устройства. 2 с. и 24 з.п.ф-лы, 7 ил.
| ТОРОИДАЛЬНЫЙ ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ (ТВР) | 2020 |
|
RU2737263C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ОПОРНОГО ЭЛЕМЕНТА, СОЕДИНЕННОГО С СИДЕНЬЕМ И ПОВОРАЧИВАЕМОГО В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1993 |
|
RU2100950C1 |
| ЭМУЛЬГАТОР ДЛЯ ПРОМЫШЛЕННЫХ ЭМУЛЬСИОННЫХ ВЗРЫВЧАТЫХ ВЕЩЕСТВ | 2019 |
|
RU2755074C2 |
| DE 4002243 А, 01.08.1991. | |||

