ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к эндоскопическим хирургическим инструментам, содержащим, но без ограничения, хирургические сшивающие скобками инструменты, которые содержат одноразовые загрузочные модули, которые способны накладывать ряды скобок на ткань, при одновременном отрезании ткани между упомянутыми рядами скобок и, в частности, к усовершенствованиям, относящимся к упомянутым инструментам и одноразовым загрузочным модулям.
УРОВЕНЬ ТЕХНИКИ
Нижеприведенные заявки на патенты США, которые включены в настоящее описание путем отсылки, вместе с настоящей заявкой, принадлежат правоприемнику данной заявки:
(1) Заявка на патент США, Surgical Stapling Apparatus With Load-Sensitive Firing Mechanism, Geoffrey С Hueil et al., Docket No. END6215USNP/070332;
(2) Заявка на патент США, Surgical Stapling Apparatus With Interlockable Firing System, Steven G. Hall et al., Docket No. END6217USNP/070334;
(3) Заявка на патент США, Articulatable Loading Units For Surgical Stapling and Cutting Instruments, Jerome R. Morgan et al., Docket No. END6218USNP/070335;
(4) Заявка на патент США, Surgical Stapling Apparatus With Reprocessible Handle Assembly, Kevin R. Doll et al., Docket No. END6220USNP/070337;
(5) Заявка на патент США, Surgical Stapling Apparatus With Articulatable Components, Kevin R. Doll et al., Docket No. END6224USNP/070341;
(6) Заявка на патент США, Surgical Stapling Apparatus With Retractable Firing Systems, Geoffrey С Hueil et al., Docket No. END6227USNP/070344.
Эндоскопическим хирургическим инструментам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Поэтому выполнены важные разработки в области эндоскопических хирургических инструментов, которые пригодны для точного размещения дистального концевого эффектора в искомом операционном поле через канюлю или троакар. Такие дистальные концевые эффекторы (например, эндоскопический режущий инструмент (типа endocutter), захват, режущее приспособление, сшивающие скобками аппараты, приспособление для наложения скрепок, устройство доступа, устройство для доставки лекарства генной терапии к месту действия и энергетическое устройство, использующее ультразвук, высокую частоту (RF), лазер и т.д.) захватывают ткань множеством способов для получения диагностического или терапевтического результата.
Известные хирургические сшивающие скобками аппараты содержат концевой эффектор, который одновременно выполняет продольное рассечение в ткани и накладывает ряды скобок на противоположные стороны рассечения. Концевой эффектор содержит пару согласованно действующих зажимных элементов, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Один из зажимных элементов вмещает кассету для скобок, содержащую, по меньшей мере, два поперечно разнесенных ряда скобок. Другой зажимной элемент образует наковальню, содержащую скобкоформирующие углубления, совмещенные с рядами скобок в кассете. Инструмент обычно содержит множество возвратно-поступательно перемещающихся клиньев, которые, при приведении в движение в дистальном направлении, проходят сквозь отверстия в кассете для скобок и входят в контакт с поводками, служащими опорой для скобок, для выполнения выталкивания скобок к наковальне.
Известны разные типы хирургических сшивающих скобками аппаратов, пригодных для эндоскопического применения. Например, в хирургическом сшивающем скобками аппарате одного типа применяется кассета для скобок. Кассета для скобок обычно несет множество скобок, ориентированных по обе стороны продольно продолжающегося паза в корпусе кассеты, который выполнен с возможностью вмещения режущего элемента, который приводится в движение вдоль паза. Когда режущий элемент перемещается по пазу кассеты, скобки выталкиваются вверх в участок наковальни инструмента. Режущий элемент может опираться на приводимый элемент, который содержит участок инструмента, отдельный от кассеты. Примеры устройств данных типов описаны в патенте США №6905057, Surgical Stapling Instrument Incorporating a Firing Mechanism Having a Linked Rack Transmission, Jeffrey S. Swayze and Frederick E. Shelton, IV (Джеффри С. Свейзи и Фредерик Э. Шелтон IV), и в патенте США №7083075, Multi-Stroke Mechanism With Automatic End of Stroke Retractions, Jeffery S. Swayze, Frederick E. Shelton, IV, Kevin Ross Doll, and Douglas B. Hoffman (Джеффри С. Свейзи, Фредерик Э. Шелтон IV, Кевин Росс Долл и Дуглас Б. Хоффман), описания которых целиком включены в настоящее описание путем отсылки.
Хирургические сшивающие скобками инструменты других типов выполнены с возможностью работы с одноразовыми загрузочными модулями (DLU), которые конструктивно выполнены с возможностью выполнения функции опоры для установленного в них кассетно-ножевого узла. Такие устройства, которые предназначены для работы с DLU, обеспечивают преимущество применения «чистого» ножевого лезвия в каждом случае работы инструментом. Пример подобного хирургического сшивающего скобками инструмента и конструкции DLU описан в патенте США №5865361, выданном Миллимэну с соавторами (Milliman et al.), описание которого целиком включено в настоящее описание путем отсылки.
В зависимости от характера операции, возможно, было бы желательно регулировать положение DLU или концевого эффектора эндоскопического хирургического инструмента. В частности, часто желательно ориентировать DLU или концевой эффектор под углом относительно продольной оси стержня инструмента. Обычно, поперечное или неосевое перемещение DLU или концевого эффектора относительно стержня инструмента часто называют «шарнирным поворотом». Упомянутое шарнирно-поворотное позиционирование позволяет врачу удобнее захватывать ткань в некоторых случаях, например, позади органа. Кроме того, шарнирно-поворотное позиционирование дает полезную возможность позиционирования DLU или эндоскопа позади концевого эффектора, без блокировки стержня инструмента.
Способы шарнирного поворота хирургического сшивающего скобками аппарата обычно усложняются объединением управления шарнирным поворотом с управлением смыканием концевого эффектора для зажима ткани и приведением в действие концевого эффектора (т.е. сшиванием скобками и отрезанием) в пространстве, ограниченном небольшим диаметром эндоскопического инструмента. Как правило, все три управляющих движения передаются по стержню в виде продольных поступательных перемещений. Например, в патенте США №5673840, выданном Шульцу с соавторами (Schulze et al.), описание которого включено в настоящую заявку путем отсылки, предлагается гармошкообразный шарнирно-поворотный механизм («с гибким участком рамы»), который шарнирно поворачивают селективным оттягиванием одного из двух соединительных штоков по стержню рабочего оборудования, при этом, каждый из штоков соответственно смещен на противоположные стороны от центральной оси стержня. Соединительные штоки перемещаются храповым механизмом между дискретными положениями в ряду данных положений.
Другой пример продольного управления механизмом шарнирного поворота содержится в патенте США №5865361, в котором предлагается передаточное звено шарнирного поворота, смещенное с эксцентрикового шарнира так, что толкающее или вытягивающее продольное поступательное перемещение передаточного звена шарнирного поворота вызывает шарнирный поворот в соответствующую сторону. Аналогично, в патенте США №5797537 предлагается аналогичный шток, проходящий по стержню для осуществления шарнирного поворота. Другие примеры шарнирно-поворачиваемых хирургических сшивающих скобками устройств описаны в патентах США №6250532 и 6664532.
Из-за типов систем прошивки/отрезания, обычно применяемых в сочетании с DLU, конструкции приводов для шарнирного поворота DLU часто должны развивать значительные крутящие моменты для сгибания прошивной/отрезной конструкции. Данная проблема осложняется отсутствием доступного пространства для размещения приводящих устройств, которые являются достаточно крупными для развития упомянутых требуемых усилий. Кроме того, известные шарнирно-поворотные конструкции требуют от врача использования обеих рук для шарнирного поворота устройства.
Следовательно, существует потребность в хирургическом отрезающем и сшивающем скобками инструменте, который выполнен с возможностью работы с DLU и обладает улучшенными возможностями шарнирного поворота, включая способность шарнирного поворота инструмента с использованием одной руки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом изобретения предлагается хирургический сшивающий скобками аппарат, который может содержать узел рукоятки, который содержит корпус рукоятки и подвижную рукоятку, которую можно перемещать относительно корпуса рукоятки путем выполнения рабочих ходов. Приводящий стержень может быть установлен, по меньшей мере, частично в корпус рукоятки и может быть смонтирован с возможностью создания приводящих движений в ответ на манипулирование подвижной рукояткой. Поворотный кожух может подвижно соединяться с корпусом рукоятки и содержать удлиненный корпус, соединенный с ним для поворотного движения вместе с поворотным кожухом вокруг продольной оси, заданной удлиненным корпусом. Удлиненный корпус может иметь дистальный конец, который выполнен с возможностью рабочего соединения с одноразовым загрузочным модулем, и проксимальный конец, который выполнен с возможностью сопряжения с приводящим стержнем для передачи приводящих движений от приводящего стержня одноразовому загрузочному модулю. Хирургический сшивающий скобками аппарат может дополнительно содержать фиксируемую систему поворота для селективной фиксации поворотного кожуха, чтобы предотвращать его поворот вокруг продольной оси.
В соответствии с другим общим аспектом различных вариантов осуществления настоящего изобретения предлагается хирургический сшивающий скобками аппарат, который может содержать узел рукоятки, который содержит подвижную рукоятку и неподвижный корпус рукоятки. Подвижную рукоятку можно перемещать путем выполнения рабочих ходов относительно неподвижного корпуса рукоятки. Приводящий стержень может быть установлен, по меньшей мере, частично в неподвижный корпус рукоятки и может быть смонтирован с возможностью создания приводящих движений в ответ на манипулирование упомянутой подвижной рукояткой. Хирургический сшивающий скобками аппарат может дополнительно содержать удлиненный корпус, который имеет дистальный конец, который выполнен с возможностью рабочего соединения с одноразовым загрузочным модулем, и проксимальный конец, который сопрягается с приводящим стержнем для передачи приводящих движений от приводящего стержня одноразовому загрузочному модулю. Система шарнирного поворота может быть установлена с возможностью функционирования на узел рукоятки и выполнена с возможностью сопряжения с удлиненным корпусом для селективного подведения к нему шарнирно-поворотных движений в ответ на манипулирование рычагом шарнирного поворота, установленного с возможностью функционирования вблизи подвижной рукоятки так, чтобы рычагом шарнирного поворота можно было работать той же рукой, которая служит для манипулирования подвижной рукояткой.
В соответствии с еще одним общим аспектом различных вариантов осуществления настоящего изобретения предлагается хирургический сшивающий скобками аппарат, который может содержать узел рукоятки, который содержит подвижную рукоятку и корпус рукоятки. Подвижную рукоятку можно перемещать путем выполнения рабочих ходов относительно корпуса рукоятки. Приводящий стержень может быть установлен, по меньшей мере, частично в корпус рукоятки и может быть смонтирован с возможностью продольного перемещения в корпусе рукоятки в ответ на манипулирование упомянутой подвижной рукояткой путем выполнения рабочих ходов. Хирургический сшивающий скобками аппарат может дополнительно содержать удлиненный корпус, который выступает из корпуса рукоятки. Удлиненный корпус может иметь дистальный конец, который выполнен с возможностью рабочего соединения с одноразовым загрузочным модулем, и проксимальный конец, который выполнен с возможностью сопряжения с приводящим стержнем для передачи приводящих движений от приводящего стержня в одноразовый загрузочный модуль. Система шарнирного поворота может быть установлена с возможностью функционирования на узле рукоятки и выполнена с возможностью сопряжения с удлиненным корпусом для селективного направления в него шарнирно-поворотных движений. Переключательное устройство может быть выполнено с возможностью такого сопряжения с подвижной рукояткой, приводящим стержнем и системой шарнирного поворота, чтобы, когда переключательное устройство ориентировано в положение для прошивки/отрезания, манипулирование подвижной рукояткой путем выполнения рабочих ходов приводило в движение приводящий стержень, и, когда переключательное устройство ориентировано в положение для шарнирного поворота, манипулирование подвижной рукояткой путем выполнения рабочих ходов приводило в движение систему шарнирного поворота.
В соответствии с другим общим аспектом различных вариантов осуществления настоящего изобретения предлагается механизм шарнирного поворота для хирургического сшивающего скобками аппарата, который может содержать корпус рукоятки и удлиненный корпус, который выступает из корпуса рукоятки и выполнен с возможностью рабочего соединения с шарнирно-поворачиваемым одноразовым загрузочным модулем, который срабатывает в ответ на аксиальные движения, передаваемые удлиненным корпусом. Различные варианты осуществления механизма шарнирного поворота могут содержать сдвигаемый элемент, который установлен с возможностью перемещения в участок корпуса рукоятки для селективного продольного перемещения в нем. Сдвигаемый элемент может сопрягаться с удлиненным корпусом. Поворотный кулачковый диск может быть установлен с возможностью поворота на узле рукоятки и выполнен с возможностью такого сопряжения со сдвигаемым элементом, чтобы поворот кулачкового диска в первом направлении перемещал сдвигаемый элемент в первом аксиальном направлении, и поворот кулачкового диска во втором направлении перемещал сдвигаемый элемент во втором аксиальном направлении.
В соответствии с другим общим аспектом различных вариантов осуществления настоящего изобретения предлагается механизм шарнирного поворота для хирургического сшивающего скобками аппарата, который содержит корпус рукоятки и удлиненный корпус, который выступает из корпуса рукоятки и выполнен с возможностью рабочего соединения с шарнирно-поворачиваемым одноразовым загрузочным модулем, который срабатывает в ответ на аксиальные движения, передаваемые удлиненным корпусом. Различные варианты осуществления механизма шарнирного поворота могут содержать сдвигаемый элемент, который установлен с возможностью перемещения в участок корпуса рукоятки для селективного продольного перемещения в нем. Сдвигаемый элемент может сопрягаться с удлиненным корпусом. Кольцо шарнирного поворота может быть установлено с возможностью поворота в участок узла рукоятки и выполнено с возможностью такого рабочего сопряжения со сдвигаемым элементом, чтобы поворот кольца шарнирного поворота в корпусе рукоятки в первом направлении перемещал сдвигаемый элемент в первом аксиальном направлении, и поворот кольца шарнирного поворота во втором направлении перемещал сдвигаемый элемент во втором аксиальном направлении. Головка шарнирного поворота может быть установлена с возможностью перемещения на корпус рукоятки и может быть выполнена с возможностью сопряжения с кольцом шарнирного поворота для сообщения ему поворотных движений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в настоящее описание и являются его составной частью, иллюстрируют варианты осуществления изобретения и, вместе с вышеприведенным общим описанием различных вариантов осуществления изобретения и нижеприведенным подробным описанием вариантов осуществления, служат для пояснения различных принципов настоящего изобретения.
Фиг.1 представляет вид в перспективе различных вариантов осуществления хирургического сшивающего скобками аппарата многократного использования в соответствии с настоящим изобретением, с присоединенным к аппарату шарнирно-поворачиваемым одноразовым загрузочным модулем.
Фиг.2 - вид в перспективе различных вариантов осуществления хирургического сшивающего скобками аппарата многократного использования в соответствии с настоящим изобретением, с присоединенным к аппарату нешарнирным одноразовым загрузочным модулем.
Фиг.3 - местный вид в перспективе с разделением деталей варианта осуществления быстроразъемного крепежного средства в соответствии с настоящим изобретением.
Фиг.4 - вид в сборе с пространственным разделением деталей различных вариантов осуществления хирургического сшивающего скобками аппарата многократного использования в соответствии с настоящим изобретением.
Фиг.5 - другой вид в сборе с пространственным разделением деталей хирургического сшивающего скобками аппарата многократного использования, показанного на фиг.4.
Фиг.6 - вид в сборе с пространственным разделением деталей участка узла рукоятки варианта осуществления хирургического сшивающего скобками аппарата многократного использования, показанного на фиг.4 и 5.
Фиг.7 - местный вид справа в перспективе варианта осуществления приводного узла прошивки/отрезания в соответствии с настоящим изобретением.
Фиг.8 - местный вид слева в перспективе варианта осуществления приводного узла прошивки/отрезания, показанного на фиг.7.
Фиг.9 - вид слева варианта осуществления приводного узла прошивки/отрезания, показанного на фиг.7 и 8.
Фиг.10 - вид в сборе с пространственным разделением деталей варианта осуществления узла штока управления из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.11 - вид в сборе с пространственным разделением деталей варианта осуществления узла поворотной головки и механизма шарнирного поворота в соответствии с настоящим изобретением.
Фиг.12 - вид в перспективе загрязненного хирургического сшивающего скобками аппарата многократного использования, показанного на фиг.1 и 2, с отсоединенным от него одноразовым загрузочным модулем.
Фиг.13 - вид в перспективе загрязненного хирургического сшивающего скобками аппарата многократного использования, показанного на фиг.12, со штоком управления, выдвинутым из дистального конца удлиненного корпуса.
Фиг.14 - блок-схема последовательности этапов варианта осуществления способа очистки в соответствии с настоящим изобретением.
Фиг.15 - вид в перспективе выдвинутого штока управления, погруженного в раствор для очистки.
Фиг.16 - другая блок-схема последовательности других этапов варианта осуществления способа очистки в соответствии с настоящим изобретением.
Фиг.17 - вид в перспективе погружения в раствор для очистки различных компонентов варианта осуществления в соответствии с настоящим изобретением.
Фиг.18 - вид сбоку варианта осуществления приводного узла прошивки/отрезания из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.19 - блок-схема последовательности этапов варианта осуществления способа повторной сборки в соответствии с настоящим изобретением.
Фиг.20 - вид с пространственным разделением, показывающий применение варианта осуществления монтажного лотка в соответствии с настоящим изобретением.
Фиг.21 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата многократного использования в соответствии с настоящим изобретением, соединенного с нешарнирным одноразовым загрузочным модулем.
Фиг.22 - вид в сборе с пространственным разделением деталей узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.21.
Фиг.23 - вид в сборе с пространственным разделением деталей другого варианта осуществления механизма определения одноразового загрузочного модуля из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.24 - вид в сборе с пространственным разделением деталей другого варианта осуществления узла поворотной головки и механизма шарнирного поворота в соответствии с настоящим изобретением.
Фиг.25 - вид в сборе с пространственным разделением деталей варианта осуществления узла курка деблокировки прошивки/отрезания в соответствии с настоящим изобретением.
Фиг.26 - местный вид в сборе узла курка деблокировки прошивки/отрезания, показанного на фиг.25.
Фиг.27 - вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением.
Фиг.28 - другой вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением, с подвижной рукояткой данного узла, подтянутой к неподвижному участку рукоятки для смыкания наковальни на одноразовом загрузочном модуле.
Фиг.29 - другой вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением, с подвижной рукояткой, возвращенной в исходное положение после смыкания наковальни.
Фиг.30 - другой вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением перед приведением в действие курка деблокировки прошивки/отрезания.
Фиг.31 - другой вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением, с приведенным в действие курком деблокировки прошивки/отрезания.
Фиг.32 - другой вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением, с приведенным в действие курком деблокировки прошивки/отрезания и подвижной рукояткой в начале ее приведения в действие.
Фиг.33 - другой вид в сборе варианта осуществления узла рукоятки в соответствии с настоящим изобретением, с приведенным в действие курком деблокировки прошивки/отрезания и подвижной рукояткой данного узла, подтянутой к неподвижному участку рукоятки.
Фиг.34 - местный вид в сборе другого варианта осуществления курка деблокировки прошивки/отрезания в соответствии с настоящим изобретением.
Фиг.35 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением.
Фиг.36 - местный вид в сборе с пространственным разделением деталей участка узла рукоятки и поворотного кожуха хирургического сшивающего скобками аппарата, показанного на фиг.35.
Фиг.37 - вид в перспективе участка варианта осуществления хирургического сшивающего скобками аппарата, показанного на фиг.35 и 36, с участком корпуса рукоятки, снятым для демонстрации различных находящихся в нем компонентов в режиме поворота.
Фиг.38 - вид сбоку участка варианта осуществления хирургического сшивающего скобками аппарата, показанного на фиг.36, с его селекторным переключателем в дистальном незафиксированном положении.
Фиг.39 - увеличенный вид задвижки, выведенной из зацепления с кольцом блокировки поворота, когда аппарат находится в режиме поворота.
Фиг.40 - вид в разрезе хирургического сшивающего скобками аппарата по линии 40-40 на фиг.38.
Фиг.41 - местный вид сверху хирургического сшивающего скобками аппарата, показанного на фиг.35-40, с участком захвата, показанным в разрезе.
Фиг.42 - вид в перспективе участка варианта осуществления хирургического сшивающего скобками аппарата, показанного на фиг.35-41, с участком корпуса рукоятки, снятым для демонстрации различных находящихся в нем компонентов в режиме шарнирного поворота.
Фиг.43 - вид сбоку участка варианта осуществления хирургического сшивающего скобками аппарата, показанного на фиг.36, с его селекторным переключателем в проксимальном зафиксированном положении.
Фиг.44 - увеличенный вид задвижки, находящейся в зацеплении с кольцом блокировки поворота для фиксации аппарата находится в режиме шарнирного поворота.
Фиг.45 - местный вид в разрезе хирургического сшивающего скобками аппарата, показанного на фиг.43, по линии 45-45 на фиг.43.
Фиг.46 - местный вид в разрезе узла рукоятки хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением, в котором применяется альтернативный сдвигаемый элемент.
Фиг.47 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением.
Фиг.48 - увеличенный вид в перспективе участка узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.47, с участком корпуса рукоятки, снятым для наглядности.
Фиг.49 - местный вид сбоку узла рукоятки, показанного на фиг.49, с участком корпуса рукоятки, снятым для наглядности.
Фиг.50 - местный вид сверху узла рукоятки, показанного на фиг.49, с некоторыми компонентами, показанными в разрезе, и с системой шарнирного поворота данного узла в заблокированном положении.
Фиг.51 - местный вид сверху узла рукоятки, показанного на фиг.49 и 50, с некоторыми компонентами, показанными в разрезе, и с системой шарнирного поворота данного узла в незаблокированном положении.
Фиг.52 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением.
Фиг.53 - вид в сборе в перспективе участка узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.52, с участком корпуса рукоятки и цилиндром чувствительного механизма, снятыми для наглядности.
Фиг.54 - вид слева в сборе в перспективе узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.52 и 53, с корпусом, снятым для наглядности.
Фиг.55 - вид справа в сборе в перспективе узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.52-54, с корпусом, снятым для наглядности.
Фиг.56 - вид сбоку участка вариантов осуществления системы шарнирного поворота, зубчатых передач и селекторного переключателя шарнирного поворота, с переключателем шарнирного поворота в нейтральном положении.
Фиг.57 - другой вид сбоку вариантов осуществления системы шарнирного поворота, зубчатых передач и селекторного переключателя шарнирного поворота, с переключателем шарнирного поворота в положении шарнирного поворота влево.
Фиг.58 - другой вид сбоку вариантов осуществления системы шарнирного поворота, зубчатых передач и селекторного переключателя шарнирного поворота, с переключателем шарнирного поворота в положении шарнирного поворота вправо.
Фиг.59 - вид снизу селекторного переключателя зубчатых передач, узла зубчатого привода, зубчатой передачи шарнирного поворота и тяги шарнирного поворота в варианте осуществления в соответствии с настоящим изобретением, с селекторным переключателем зубчатых передач в положении шарнирного поворота.
Фиг.60 - вид снизу селекторного переключателя зубчатых передач, узла зубчатого привода, зубчатой передачи шарнирного поворота и тяги шарнирного поворота в варианте осуществления в соответствии с настоящим изобретением, с селекторным переключателем зубчатых передач в положении прошивки/отрезания.
Фиг.61 - увеличенный вид варианта осуществления селекторного переключателя зубчатых передач в положении шарнирного поворота.
Фиг.62 - вид в разрезе варианта осуществления селекторного переключателя зубчатых передач в положении прошивки/отрезания.
Фиг.63 - вид с торца различных компонентов хирургического сшивающего скобками аппарата в режиме шарнирного поворота.
Фиг.64 - другой вид с торца компонентов, показанных на фиг.63, в режиме прошивки/отрезания.
Фиг.65 - местный вид в разрезе и в перспективе альтернативного варианта осуществления механизма шарнирного поворота в соответствии с настоящим изобретением.
Фиг.66 - местный вид сверху в разрезе механизма шарнирного поворота, показанного на фиг.65.
Фиг.67 - изображение положения кулачкового диска и штифта шарнирного поворота в варианте осуществления механизма шарнирного поворота, показанном на фиг.65 и 66, в положении шарнирного поворота влево.
Фиг.68 - изображение положения кулачкового диска и штифта шарнирного поворота в варианте осуществления механизма шарнирного поворота, показанном на фиг.65 и 66, в прямом положении (в отсутствие шарнирного поворота).
Фиг.69 - изображение положения кулачкового диска и штифта шарнирного поворота в варианте осуществления механизма шарнирного поворота, показанном на фиг.65 и 66, в положении шарнирного поворота вправо.
Фиг.70 - вид в плане в разрезе участка другого варианта осуществления механизма шарнирного поворота в соответствии с настоящим изобретением.
Фиг.71 - местный вид в разрезе участка варианта осуществления механизма шарнирного поворота, показанного на фиг.70.
Фиг.72 - вид сбоку другого варианта осуществления механизма шарнирного поворота в соответствии с настоящим изобретением, с некоторыми из компонентов данного механизма, показанными в разрезе.
Фиг.73 - вид в разрезе варианта осуществления механизма шарнирного поворота, показанного на фиг.72, по линии 73-73 на фиг.72.
Фиг.74 - вид сбоку другого варианта осуществления механизма шарнирного поворота в соответствии с настоящим изобретением, с некоторыми из компонентов данного механизма, показанными в разрезе.
Фиг.75 - вид в перспективе варианта осуществления внешнего кольца шарнирного поворота в механизме шарнирного поворота, показанном на фиг.74.
Фиг.76 - вид слева в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением.
Фиг.77 - вид справа в перспективе варианта осуществления хирургического сшивающего скобками аппарата, показанного на фиг.76.
Фиг.78 - вид в сборе с пространственным разделением деталей правого сегмента корпуса узла рукоятки, со съемной крышкой, отсоединенной от сегмента корпуса.
Фиг.79 - другой вид правого сегмента корпуса узла рукоятки, со съемной крышкой, отсоединенной от сегмента корпуса.
Фиг.80 - вид справа сбоку узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.76-78.
Фиг.81 - вид в разрезе узла корпуса по линии 81-81 на фиг.80.
Фиг.82 - вид в разрезе узла корпуса по линии 82-82 на фиг.80.
Фиг.83 - вид в разрезе участка узла корпуса и ручки взведения по линии 83-83 на фиг.80.
Фиг.84 - вид справа сбоку узла рукоятки хирургического сшивающего скобками аппарата, показанного на фиг.76-83, со съемной крышкой, снятой для того, чтобы показать головку отведения и ручку взведения в положении «перед прошивкой/отрезанием».
Фиг.85 - другой вид справа сбоку узла рукоятки, показанного на фиг.84, с ручкой взведения во взведенном положении.
Фиг.86 - другой вид справа сбоку узла рукоятки, показанного на фиг.84 и 85, с изображением положения головки отведения и ручки взведения перед достижением полностью отработанного положения.
Фиг.87 - местный вид в разрезе узла рукоятки и ручки взведения, с ручкой взведения, поджатой в направлении по часовой стрелке для высвобождения стопорного элемента.
Фиг.88 - другой местный вид в разрезе узла рукоятки, ручки взведения и головки отведения, при этом, головка отведения высвободила стопорный элемент для предоставления возможности автоматического отведения приводящего стержня.
Фиг.89 - местный вид в перспективе участка различных вариантов осуществления одноразового загрузочного модуля в соответствии с настоящим изобретением.
Фиг.90 - вид в перспективе варианта осуществления собачки из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.91 - вид в перспективе другого варианта осуществления собачки из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.92 - вид снизу в перспективе варианта осуществления приводящего стержня из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.93 - вид снизу в перспективе другого варианта осуществления приводящего стержня из различных вариантов осуществления в соответствии с настоящим изобретением.
Фиг.93A - вид сбоку участка варианта осуществления системы прошивки/отрезания в соответствии с настоящим изобретением, применяемой в соединении с хирургическим сшивающим скобками инструментом такого типа, который описан в заявке на патент США №11/821,277, с зубом, находящимся в приводящем зацеплении с прошивным/отрезным элементом.
Фиг.93B - другой вид сбоку варианта осуществления системы прошивки/отрезания, показанного на фиг.93A, с зубом в расцепленном положении.
Фиг.94 - вид в перспективе варианта осуществления хирургического сшивающего скобками аппарата и одноразового загрузочного модуля в соответствии с настоящим изобретением.
Фиг.95 - вид в перспективе варианта осуществления одноразового загрузочного модуля, показанного на фиг.94.
Фиг.96 - вид в сборе с пространственным разделением деталей варианта осуществления одноразового загрузочного модуля, показанного на фиг.95.
Фиг.97 - вид в перспективе одноразового загрузочного модуля, показанного на фиг.95 и 96, шарнирно поворачиваемого хирургическим захватом.
Фиг.98 - вид в перспективе другого варианта осуществления одноразового загрузочного модуля в соответствии с настоящим изобретением.
Фиг.99 - вид в сборе с пространственным разделением деталей варианта осуществления одноразового загрузочного модуля, показанного на фиг.98.
Фиг.100 - вид в перспективе одноразового загрузочного модуля, показанного на фиг.98 и 99, шарнирно поворачиваемого хирургическим захватом.
Фиг.101 - вид в перспективе одноразового загрузочного модуля, показанного на фиг.98-100, с изображением его пассивного шарнирно-поворотного перемещения и активного шарнирно-поворотного перемещения.
Фиг.102 - вид в перспективе другого варианта осуществления одноразового загрузочного модуля в соответствии с настоящим изобретением.
Фиг.103 - вид в сборе с пространственным разделением деталей варианта осуществления одноразового загрузочного модуля, показанного на фиг.102.
Фиг.104 - вид в сборе с пространственным разделением деталей другого механизма определения одноразового загрузочного модуля и варианта осуществления узла штока управления из различных вариантов осуществления настоящего изобретения.
Фиг.105 - вид в перспективе другого варианта осуществления одноразового загрузочного модуля в соответствии с настоящим изобретением, с изображением его пассивного шарнирно-поворотного перемещения и активного шарнирно-поворотного перемещения.
Фиг.106 - вид в сборе с пространственным разделением деталей одноразового загрузочного модуля, показанного на фиг.105.
Фиг.107 - вид с проксимального торца одноразового загрузочного модуля, показанного на фиг.105 и 106, взятый в направлении, показанном стрелками 107-107 на фиг.105.
Фиг.108 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением.
Фиг.109 - вид в сборе с пространственным разделением деталей варианта осуществления системы шарнирного поворота в соответствии с настоящим изобретением, применяемой в хирургическом сшивающем скобками аппарате, показанном на фиг.108.
Фиг.110 - вид в сборе с пространственным разделением деталей участков промежуточного шарнирно-поворотного сочленения системы шарнирного поворота, показанной на фиг.109.
Фиг.111 - вид в перспективе хирургического сшивающего скобками аппарата, показанного на фиг.108, применяемого при открытой хирургической операции.
Фиг.112 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением, применяемого в сочетании с обычным троакаром для выполнения эндоскопической хирургической операции.
Фиг.113 - вид в перспективе другого варианта осуществления системы шарнирного поворота в соответствии с настоящим изобретением.
Фиг.114 - местный вид в сборе с пространственным разделением деталей системы шарнирного поворота, показанной на фиг.113.
Фиг.115 - вид в сборе сбоку системы шарнирного поворота, показанной на фиг.113 и 114.
Фиг.116 - вид в перспективе другого варианта осуществления системы шарнирного поворота в соответствии с настоящим изобретением.
Фиг.117 - вид в перспективе другого варианта осуществления системы шарнирного поворота в соответствии с настоящим изобретением.
Фиг.118 - вид в сборе с пространственным разделением деталей системы шарнирного поворота, показанной на фиг.117.
Фиг.119 - вид в сборе сбоку участка системы шарнирного поворота, показанной на фиг.117 и 118, с его некоторыми компонентами, показанными в разрезе для наглядности.
Фиг.120 - местный вид в сборе в перспективе различных вариантов осуществления тяг и штифтов шарнирного поворота в соответствии с настоящим изобретением.
Фиг.121 - вид в разрезе вариантов осуществления тяг и штифтов шарнирного поворота, показанных на фиг.120.
Фиг.122 - вид в перспективе другого варианта осуществления хирургического сшивающего скобками аппарата в соответствии с настоящим изобретением, применяемого в сочетании с обычным троакаром для выполнения эндоскопической хирургической операции.
Фиг.123 - местный вид в сборе с пространственным разделением деталей варианта осуществления системы шарнирного поворота хирургического сшивающего скобками аппарата, показанного на фиг.122.
ПОДРОБНОЕ ОПИСАНИЕ
Как видно из чертежей, на которых одинаковыми цифровыми позициями обозначены сходные компоненты на нескольких видах, на фиг.1 изображен хирургический инструмент многократного использования, который, в наглядных вариантах представляет собой, в частности, хирургический сшивающий скобками инструмент 10, допускающий практическое использование особых преимуществ различных вариантов осуществления настоящего изобретения. Хирургический сшивающий скобками инструмент 10 может содержать узел 12 рукоятки и удлиненный корпус 14. На фиг.1 изображен хирургический сшивающий скобками инструмент 10 с шарнирно-поворачиваемым одноразовым загрузочным модулем 16, присоединенным к данному инструменту. На фиг.2 изображен хирургический сшивающий скобками инструмент 10 с нешарнирным одноразовым загрузочным модулем 16', присоединенным к данному инструменту. Одноразовые загрузочные модули 16, 16' могут содержать инструментальный узел 17, который содержит кассетный узел 18, который вмещает множество хирургических скобок. Инструментальный узел 17 может дополнительно содержать скобкоформирующую наковальню 20. Упомянутые одноразовые загрузочные модули 16, 16' могут выполнять хирургические операции, например, отрезания ткани и наложения скобок с каждой стороны разреза. Различные варианты осуществления настоящего изобретения можно применять в соединении с одноразовыми загрузочными модулями, описанными в патенте США №5865361 изобретателя Миллимэна с соавторами (Milliman et al.), описание которого целиком включено в настоящее описание путем отсылки.
Следует понимать, что в настоящем описании термины «проксимальный» и «дистальный» применяют для обозначения положения относительно захвата практикующим врачом узла рукоятки инструмента. Следовательно, инструментальный узел 17 является дистальным относительно более проксимального узла 12 рукоятки. Далее, следует понимать, что, для удобства и ясности, специальные термины, обозначающие пространственное положение, например, «вертикальный», «горизонтальный», «вверх», «вниз», «правый» и «левый» использованы в настоящем описании применительно к чертежам. Однако, существует множество пространственно-угловых положений применения хирургических инструментов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
Как пояснялось выше, известные хирургические сшивающие скобками аппараты, например, аппараты, описанные в патенте США №5865361, слабо пригодны для многократной обработки (например, многократной стерилизации), обеспечивающей возможность многократного применения инструментов, так как их нелегко разбирать. Хирургический сшивающий скобками аппарат 10, показанный на фиг.1-20, выполнен с возможностью удобной многократной обработки и может применяться в соединении с шарнирно-поворачиваемым одноразовым загрузочным модулем 16 (фиг.1) и нешарнирными одноразовыми загрузочными модулями 16' (фиг.2), как подробно дополнительно описано ниже. В различных вариантах осуществления хирургического сшивающего скобками аппарата 10 может применяться узел 12 рукоятки, который конструктивно выполнен для облегчения очистки и стерилизации различных компонентов, заключенных в упомянутой рукоятке. Например, узел 12 рукоятки может содержать неподвижный участок 22 рукоятки, подвижную рукоятку 24 и цилиндрический участок 26. Поворотная головка 28 может быть установлена на переднем конце цилиндрического участка 26 для поддержки поворота удлиненного корпуса 14 относительно узла 12 рукоятки вокруг продольной оси «L-L» сшивающего скобками аппарата 10. Как дополнительно подробно поясняется ниже, некоторые варианты осуществления узла рукоятки могут также содержать рычаг 30 шарнирного поворота, который установлен на переднем конце цилиндрического участка 26 около поворотной головки 28. Возможна разработка других вариантов осуществления для применения в соединении с нешарнирными одноразовыми загрузочными модулями, и, следовательно, узел 12 рукоятки может не содержать подобных компонентов управления шарнирным поворотом. Узел 12 рукоятки может дополнительно содержать корпус 36 рукоятки, который может быть сформирован из первого сегмента 36a корпуса и второго сегмента 36b корпуса, которые, при их соединении, образуют корпус 36 рукоятки. Для облегчения разборки узла 12 рукоятки, сегменты 36a, 36b корпуса можно соединять, по меньшей мере, одним и, предпочтительно, тремя быстроразъемными крепежными средствами 400.
Как показано на фиг.3, быстроразъемное крепежное средство 400 может содержать байонетное крепежное средство, которое содержит участок 402 головки винта, который содержит цилиндрический участок 404 или участок корпуса, который выступает из него и выполнен в размер для вмещения в отверстие 412 в соответствующем распорном элементе 410 жесткости, сформированном в сегменте 36a корпуса. Стержень или поперечный элемент 406 установлен в участке 404 корпуса для формирования, по существу, T-образного соединительного участка 408, выполненного в размер для вмещения в сегменты 414 прорези с каждой стороны отверстия 412. Сегменты 414 прорези выполнены так, что, когда T-образный соединительный участок вставляют в отверстие 412 и сегменты 414 прорези поворачивают, как показано стрелкой «T» на фиг.3, стержень 406 фиксирует с возможностью разъема соединительный участок 408 в заданном положении. В различных вариантах осуществления участок 404 корпуса быстроразъемного крепежного средства 400 может продолжаться через соответствующее отверстие в сегменте 36b корпуса и затем замыкаться фиксироваться стержнем или поперечным элементом 406 к данному сегменту так, что быстроразъемное крепежное средство 400 оказывается неразъемно связанным со вторым сегментом 36b корпуса, чтобы, когда сегмент 36b корпуса отсоединяют от первого сегмента 36a корпуса, быстроразъемные крепежные средства 400 не терялись и оставались на втором сегменте 36b корпуса при очистке/стерилизации.
Как показано на фиг.4-8, подвижная рукоятка 24 может быть соединена с возможностью поворота с приводным узлом 500 прошивки/отрезания, который можно демонтировать с корпуса 36 рукоятки для очистки/стерилизации. В различных вариантах осуществления приводного узла 500 прошивки/отрезания может содержать внутренний рамный узел 510, который служит рабочей опорой для подвижной рукоятки 24. Как можно видеть на упомянутых фигурах, подвижная рукоятка 24 может быть шарнирно соединена с внутренним рамным узлом 510 шарнирным пальцем 38. Поджимной элемент 40, который может содержать торсионную пружину, отжимает подвижную рукоятку 24 от неподвижного участка 22 рукоятки. Смотри фиг.6-8. Приводящий стержень 46 может быть установлен внутри внутреннего рамного узла 510 и может содержать зубчатую рейку 48. Приводящая собачка 42, на которой имеется зуб 43 зацепления рейки, установлена с возможностью поворота на шарнирном пальце 44 на одном конце подвижной рукоятки 24. Смотри фиг.8. Поджимной элемент 50, который может содержать торсинную пружину, расположен с возможностью поджима приводящей собачки 42 к зубчатой рейке 48 приводящего стержня 46. Смотри фиг.7. Подвижную рукоятку 24 можно поворачивать, чтобы перемещать зуб 43 зацепления рейки приводящей собачки 42 в контакт с зубчатой рейкой 48 приводящего стержня 46 для линейной подачи приводящего стержня 46 в дистальном направлении «DD». Дистальный конец приводящего стержня 46 может содержать полость 47, сформированную в данном стержне, для вмещения проксимального конца 49 штока 52 управления (фиг.4) таким образом, что линейная подача приводящего стержня 46 вызывает соответствующую линейную подачу штока 52 управления.
Внутренний рамный узел 510 может дополнительно содержать запорную собачку 54, которая содержит фиксирующий выступ 55, выполненный на данной собачке, соединена с рамным узлом 510 с возможностью поворота на шарнирном пальце 57 и поджата в полость 512 в приводящем стержне 46 поджимным элементом 56, который может содержать торсионную пружину. Фиксирующий выступ 55 запорной собачки 54 может перемещаться в зацепление с полостью 512 для удерживания приводящего стержня 46 в продольно фиксированном положении, когда одноразовый загрузочный модуль не присоединен к удлиненному корпусу 14, как дополнительно подробно поясняется ниже.
Внутренний рамный узел 510 может также вмещать с возможностью функционирования механизм 58 отведения, который может содержать правую головку 32a отведения и левую головку 32b отведения, которые соединены с проксимальным концом приводящего стержня 46 соединительным стержнем 60. Смотри фиг.6. Соединительный стержень 60 может содержать правый и левый участки 62a и 62b зацепления для вмещения головок 32a и 32b отведения, соответственно, и центральный участок 62c, который выполнен в размер и по форме для поступательного перемещения внутри пары продольных прорезей 514 во внутреннем рамном узле 510 и прорезей 34a, сформированных в приводящем стержне 46 вблизи его проксимального конца. Каждая из головок 32a, 32b отведения может содержать полость в данной головке, чтобы головки можно было устанавливать по прессовой посадке на соответствующие участки 62a, 62b зацепления, соответственно. В различных вариантах осуществления настоящего изобретения соединительный стержень 60 может быть выполнен так, чтобы, когда с данного штыря снимают головки 32a, 32b отведения с целью разборки, соединительный стержень 60 оставался установленным в заданном положении согласованно с внутренним рамный узлом 510. Смотри фиг.7, 8 и 17. Как показано на фиг.6, центральный участок 62C может быть снабжен вырезом 63, который предназначен для зацепления с удерживанием фиксирующей лапкой (не показанной), сформированной на проксимальном конце фиксатора 520, который вмещается с возможностью сдвига в полость 522 в приводящем стержне 46. Отводящая пружина 524 закреплена между поперечной стойкой 526 в приводящем стержне 46 и фиксатором 520 для оттягивания фиксатора 520 в дистальном направлении, чтобы фиксирующая лапка, сформированная на его проксимальном конце, зацеплялась с возможностью удерживания за вырез 63 в соединительном стержне 60. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что, когда головки 32a и 32b отведения отсоединяют от соединительного стержня 60, соединительный стержень 60 остается соединенным с внутренним рамным узлом 510 лапкой на фиксаторе 520.
Расцепляющая планка 64 может быть соединена с возможностью функционирования с приводящим стержнем 46 и установлена для перемещения относительно упомянутого стержня при манипулировании головками 32a, 32b отведения. Пара пространственно разнесенных штифтов 66 может продолжаться наружу от боковой поверхности приводящего стержня 46 для сцепления с парой соответствующих наклонных кулачковых прорезей 68, сформированных в расцепляющей планке 64. После перемещения головок 32a, 32b отведения в проксимальном направлении «PD», штифты 66 могут отводить расцепляющую планку 64 вниз относительно приводящего стержня 46 и относительно зубчатой рейки 48 так, чтобы нижний участок расцепляющей планки 64 продолжался ниже зубчатой рейки 48 для отцепления зуба 43 зацепления рейки приводящей собачки 42 от зубчатой рейки 48. Поперечная прорезь 70 сформирована на проксимальном конце расцепляющей планки 64 для вмещения центрального участка 62c соединительного стержня 60, и удлиненные прорези 34 (фиг.1) образованы в цилиндрической секции 26 узла 12 рукоятки для обеспечения продольного поступательного перемещения соединительного стержня 60 в то время, когда головки 32a, 32b отведения оттягивают в проксимальном направлении «PD» для отведения приводящего стержня 46 и, следовательно, отведения штока 52 управления в проксимальном направлении «PD».
В различных вариантах осуществления внутренний рамный узел 510 может также служить рабочей опорой для узла 80 блокировки прошивки/отрезания, который может содержать стопорный штифт 82 и поворотный фиксаторный элемент 83. Смотри фиг.7 и 8. Стопорный штифт 82 поджимается в центральное положение поджимными пружинами 84 и содержит кольцевые конусообразные кулачковые поверхности 85. Каждый конец стопорного штифта 82 продолжается через корпус 36 рукоятки вблизи верхнего края неподвижного участка 22 рукоятки. Поворотный фиксаторный элемент 83 может быть закреплен на его дистальном конце с возможностью поворота на шарнирном пальце 86 и может содержать запирающий затвор 88 и проксимальную выступающую часть 90, содержащую прорезь 89, сформированную в ней. Смотри фиг.7 и 8. Поворотный фиксаторный элемент 83 может поджиматься пружиной 93 (фиг.9), чтобы вынуждать запирающий затвор 88, закрепленный на данном элементе, входить в упорный фиксатор 53 внизу приводящего стержня 46 для предотвращения выдвижения приводящего стержня 46 и следующего за этим прошивного/отрезного срабатывания сшивающего скобками аппарата 10. Кольцевая конусообразная кулачковая поверхность 85 на стопорном штифте 82 расположена так, чтобы продолжаться в клиновидную прорезь 89 в проксимальной выступающей части 90. Поперечное перемещение стопорного штифта 82 в любом направлении против поджимного усилия каждой пружины 84 перемещает конусообразную кулачковую поверхность 85 в зацепление с боковыми стенками клиновидной прорези 89 в проксимальной выступающей части 90 и, тем самым, приводит к повороту поворотного фиксаторного элемента 83 на шарнирном пальце 86 с выходом запирающего затвора 88 из упорного фиксатора 53, что делает возможным продвижение вперед приводящего стержня 46.
Как дополнительно показано на фиг.6-9, передаточное звено 182 чувствительного механизма может быть установлено с возможностью функционирования на внутреннем рамном узле 510. Как можно видеть на данных фигурах, передаточное звено 182 чувствительного механизма может быть присоединено с возможностью сдвига к внутреннему рамному узлу 510 штифтом или винтом 530, который продолжается сквозь прорезь 532 в передаточном звене 182 чувствительного механизма, так что передаточное звено 182 чувствительного механизма может продольно сдвигаться относительно внутреннего рамного узла 510. Дистальный конец пружины 531 может быть закреплен к винту 530, и проксимальный конец пружины 531 может быть зацеплен за скобку 533 на передаточном звене 182 чувствительного механизма. Смотри фиг.6. Пружина 531 служит для оттягивания передаточного звена 182 чувствительного механизма в дистальном направлении «DD». Передаточное звено 182 чувствительного механизма может дополнительно содержать проксимальный фиксирующий рычаг 535, который содержит выступающий внутрь проксимальный конец 537, выполненный с возможностью взаимодействия с запорной собачкой 54. В частности, когда к сшивающему скобками аппарату 10 не присоединен одноразовый загрузочный модуль 16, 16', передаточное звено 182 чувствительного механизма оттянуто в дистальном направлении пружиной 531. В данном «ненагруженном» положении, проксимальный конец 537 проксимального фиксирующего рычага 535 не зацепляет запорную собачку 54 для удерживания запорной собачки 54 в положении фиксации, в котором фиксирующий выступ 55 вмещен в полость 512 и удерживает приводящий стержень 46 в продольно зафиксированном положении. Таким образом, если к сшивающему скобками аппарату 10 не присоединен одноразовый загрузочный модуль 16, 16', то сшивающий скобками аппарат 10 нельзя нормально привести в действие.
Передаточное звено 182 чувствительного механизма может дополнительно содержать продолжающуюся вниз дистальную лапку 534, сформированную на данном звене, для контакта с фланцем 179, сформированном на цилиндре 178 чувствительного механизма. Смотри фиг.4 и 5. Как дополнительно подробно поясняется ниже, трубка 176 чувствительного механизма ориентирована для сопряжения с цилиндром 178 чувствительного механизма. Смотри фиг.10. Передаточное звено 182 чувствительного механизма может дополнительно содержать пружинную консоль 536 с продолжающимся вниз концом 538, который входит в зацепление с кулачковой поверхностью 83a на поворотном фиксаторном элементе 83. Смотри фиг.7. Когда одноразовый загрузочный модуль 16, 16' присоединяют к дистальному концу удлиненного корпуса 14, одноразовый загрузочный модуль 16, 16' приходит в зацепление с дистальным концом трубки 176 чувствительного механизма и, тем самым, передвигает трубку 176 чувствительного механизма в проксимальном направлении, и, в результате, передвигает цилиндр 178 чувствительного механизма и передаточное звено 182 чувствительного механизма в проксимальном направлении. Перемещение передаточного звена 182 чувствительного механизма в проксимальном направлении вынуждает конец 538 пружинной консоли 536 перемещаться в проксимальном направлении от кулачковой поверхности 83a, что позволяет фиксаторному элементу 83 поворачиваться под действием пружины 92 из положения, допускающего срабатывание сшивающего скобками аппарата 10 (т.е. допускающего приведение в действие приводящего стержня 46) в блокирующее положение, в котором запирающий затвор 88 вмещен в упорный фиксатор 53 в приводящем стержне 46 и предотвращает срабатывание сшивающего скобками аппарата 10. Передаточное звено 182 чувствительного механизма предотвращает срабатывание, когда одноразовый загрузочный модуль 16 отсутствует. Фиксаторный элемент 83 предотвращает срабатывание при смыкании и размыкании узла 20 наковальни. Кроме того, когда передаточное звено 182 чувствительного механизма перемещается в проксимальном направлении, проксимальный конец 537 проксимального фиксирующего рычага 535 выполняет функцию поворота запорной собачки 54 таким образом, что фиксирующий выступ 55 выходит из полости 512 и, тем самым, позволяет привести в действие приводящий стержень 46. Смотри фиг.8.
Как показано на фиг.4, корпус 36 рукоятки может содержать кольцевой паз 117, выполненный с возможностью вмещения кольцевого пояска 118, сформированного на проксимальном конце поворотной головки 28, которая предпочтительно образована из отформованных полусекций 28a и 28b, который могут соединяться между собой винтами 29. Кольцевой паз 117 и поясок 118 допускают поворот поворотной головки 28 относительно корпуса 36 рукоятки. Как показано на фиг.4, удлиненный корпус 14 может содержать наружную обойму 124, которая выполнена в размер, чтобы служить опорой для трубки 176 чувствительного механизма (показанной на фиг.10), и передаточное звено 123 шарнирного поворота. Данная сборка из компонентов 123, 124, 176 и 52 иногда называется в настоящем описании «узлом 125 штока управления» и может содержать другие компоненты, шарнирно установленные на штоке 52 управления. Проксимальный конец обоймы 124 содержит диаметрально противоположные отверстия 128, которые выполнены в размер для вмещения радиальных выступов 132, сформированных на дистальном конце поворотной головки 28. Смотри фиг.4 и 5. Выступы 132 и отверстия 128 жестко фиксируют поворотную головку 28 и удлиненный корпус 14 как от продольного, так и от поворотного перемещения друг относительно друга. Следовательно, поворот поворотной головки 28 относительно узла 12 рукоятки приводит к соответствующему повороту удлиненного корпуса 14 вокруг продольной оси L-L относительно узла 12 рукоятки. Следует также понимать, что, так как к дистальному концу удлиненного корпуса 14 присоединен одноразовый загрузочный модуль 16, 16', то поворот удлиненного корпуса 14 приводит также к повороту одноразового загрузочного модуля 16, 16'.
В различных вариантах осуществления механизм 120 шарнирного поворота может быть установлен на поворотной головке 28 и может содержать рычаг 30 шарнирного поворота и кулачковый элемент 136. Смотри фиг.11. Рычаг 30 шарнирного поворота может быть установлен с возможностью поворота на шарнирном пальце 140, который можно закрепить на резьбе в поворотной головке 28. Подвижный штифт 142 может вмещаться в гнездо 131 в нижней части рычага 30 шарнирного поворота и продолжаться вниз от данного рычага для зацепления с кулачковым элементом 136. Кулачковый элемент 136 может содержать корпус 144, который содержит удлиненную прорезь 146, продолжающуюся через одну стороны данного корпуса. Пару кулачковых пластин 136a, 136b можно соединять с корпусом 144 парой заклепок 145 или другими подходящими крепежными средствами для формирования узла 137 кулачковых пластин. В других вариантах осуществления узел 137 кулачковых пластин может быть сформирован в одно целое с корпусом 144. Кулачковые пластины 136a и 136b могут содержать ступенчатую кулачковую поверхность 148a, 148b, соответственно, которая формирует ступенчатую кулачковую поверхность 148. Каждая ступенька ступенчатой поверхности 148 соответствует конкретной степени шарнирного поворота сшивающего скобками аппарата 10. Удлиненная прорезь 146 выполнена с возможностью вмещения подвижного штифта 142, выступающего из рычага 30 шарнирного поворота. Узел 137 кулачковых пластин прикреплен к корпусу 144 таким образом, чтобы формировать дистальный ступенчатый участок 150 и проксимальный ступенчатый участок 152. Проксимальный ступенчатый участок 152 содержит выемку 154.
Как можно видеть на фиг.4, механизм 120 шарнирного поворота может дополнительно содержать сдвигаемый элемент 138, который содержит выступающий вверх консольный участок 540, который содержит вырез 542, который сформирован в данном участке в размер для вмещения лапки 544, сформированной на цилиндре 178 чувствительного механизма. Дистальный конец сдвигаемого элемента 138 может содержать консоль 546, которая содержит отверстие 548, выполненное с возможностью вмещения пальца 164, продолжающегося из проксимального конца передаточного звена 123 шарнирного поворота. Смотри фиг.4 и 10. К сдвигаемому элементу 138 прикреплен штифт 166, который может быть изготовлен из неабразивного материала, например, тефлона®, и в размер для вмещения в ступенчатую кулачковую поверхность 148. В собранном состоянии дистальный и проксимальный ступенчатые участки 150 и 152 кулачкового элемента 136 расположены под фланцами 170 и 172, сформированными на поворотной головке 28 для ограничения перемещения кулачкового элемента 136 поперечным движением относительно продольной оси «L-L» сшивающего скобками аппарата 10. Когда рычаг 30 шарнирного поворота поворачивают вокруг шарнирного пальца 140, кулачковый элемент 136 поперечно перемещается на поворотной головке 28 и перемещает, при этом, ступенчатую кулачковую поверхность 148 в поперечном направлении относительно штифта 166, и, тем самым, вынуждает штифт 166 перемещаться в проксимальном или дистальном направлении по ступенчатой кулачковой поверхности 148. Поскольку штифт 166 жестко прикреплен к сдвигаемому элементу 138, то сдвигаемый элемент 138 перемещается в проксимальном или дистальном направлении и вызывает соответствующее проксимальное или дистальное перемещение передаточного звена 123 шарнирного поворота.
Цилиндр 178 чувствительного механизма может содержать выступающий участок 544, выполненный с возможностью вмещения в выемку 154 в узле 137 кулачковых пластин. Когда к дистальному концу удлиненного корпуса 14 сшивающего скобками аппарата 10 прикреплен рабочим соединением шарнирно-поворотный одноразовый загрузочный модуль 16, выступ 544 перемещается проксимально от выемки 154 в кулачковом элементе 136. При расположении выступа 544 проксимально от выемки 154, кулачковый элемент 136 может свободно перемещаться в поперечном направлении и, тем самым, осуществлять шарнирный поворот сшивающего скобками аппарата 10. Как поясняется в патенте США №5,865,361, нешарнирный одноразовый загрузочный модуль 16' не содержит удлиненного вставного наконечника. По существу, когда в удлиненный корпус 14 вставляют нешарнирный одноразовый загрузочный модуль 16', цилиндр 178 чувствительного механизма не перемещается в проксимальном направлении на расстояние, достаточное для вывода выступа 544 из выемки 154. Следовательно, кулачковый элемент 136 заблокирован от поперечного перемещения выступом 544, который находится в выемке 154, и рычаг 30 шарнирного поворота застопорен в его центральном положении.
Как можно видеть на фиг.4-9, данный вариант осуществления может также содержать узел 600 отключения блокировки прошивки/отрезания, который содержит кнопку 601 отключения блокировки, к которой прикреплена проволока 602 отключения блокировки. Проволока 602 отключения блокировки может быть уложена с возможностью сдвига между лапками 606 фиксации формы проволоки, сформированными на верхней поверхности 604 внутреннего рамного узла 510. Дистальный конец 610 проволоки 602 отключения блокировки закреплен в отверстии 539 в дистальном конце передаточного звена 182 чувствительного механизма. Когда кнопку 601 отключения блокировки перемещают в проксимальном направлении «PD», проволока 602 отключения блокировки оттягивает в проксимальном направлении передаточное звено 182 чувствительного механизма, которое отжимает запорную собачку 54 из стопорного зацепления с приводящим стержнем 46, а также вынуждает конец 538 пружинной консоли 536 отойти в проксимальном направлении от кулачковой поверхности 83a, чтобы позволить фиксаторному элементу 83 повернуться под действием пружины 92 из положения, допускающего срабатывание сшивающего скобками аппарата 10 (т.е. допускающего приведение в действие приводящего стержня 46) в блокирующее положение, в котором запирающий затвор 88 вмещен в упорный фиксатор 53 в приводящем стержне 46 и предотвращает срабатывание сшивающего скобками аппарата 10, пока не нажат стопорный штифт 82.
Как показано на фиг.1, 2, 9 и 10, чтобы применить сшивающий скобками аппарат 10, сначала к дистальному концу удлиненного корпуса 14 прикрепляют одноразовый загрузочный модуль 16, 16'. Сшивающий скобками аппарат 10 можно использовать с шарнирно-поворачиваемыми одноразовыми загрузочными модулями 16 и нешарнирными одноразовыми загрузочными модулями 16', каждый из которых содержит, например, линейные ряды скобок от приблизительно 30 мм до приблизительно 60 мм. Способ присоединения одноразового загрузочного модуля 16, 16' к удлиненному корпусу 14 описан в патенте США №5865361. Когда вставной наконечник одноразового загрузочного модуля 16, 16' сцепляется с дистальным концом трубки 176 чувствительного механизма, то приводится в действие механизм обнаружения одноразового загрузочного модуля. Когда вставной наконечник входит в зацепление с трубкой 176 чувствительного механизма и перемещает ее в проксимальном направлении, трубка 176 чувствительного механизма вызывает проксимальное перемещение цилиндра 178 чувствительного механизма и передаточного звена 182 чувствительного механизма в проксимальном направлении «PD», чтобы повернуть фиксаторный элемент 83 против часовой стрелки, из неблокирующего положения в положение, в котором затвор 88 блокирует перемещение приводящего стержня 46.
Когда одноразовый загрузочный модуль 16, 16' присоединен к сшивающему скобками аппарату 10, инструментальный узел 17 можно расположить около намеченной ткани. Чтобы зажать намеченную ткань между скобкоформирующей наковальней 20 и кассетным узлом 18, подвижную рукоятку 24 поворачивают к неподвижному участку 22 рукоятки против усилия торсионной пружины 40 для перемещения приводящей собачки 42 в зацепление с выступом 322 на приводящем стержне 46. Зацепление между выступом 322 и приводящей собачкой 42 приводит к дистальной подаче приводящего стержня 46 и, следовательно, дистальной подаче штока 52 управления. Шток 52 управления соединен на его дистальном конце с узлом привода аксиальной подачи в одноразовом загрузочном модуле 16, 16', содержащем приводную поперечину, чтобы дистальное перемещение штока 52 управления вызывало дистальное перемещение приводной поперечины в дистальном направлении и, тем самым, вынуждало скобкоформирующую наковальню 20 поворачиваться в сомкнутое положение таким образом, как описано в патенте США №5865361. В различных вариантах осуществления один полный ход подвижной рукоятки 24 может подать приводящий стержень 46 на приблизительно 15 мм, что может быть достаточным для зажима ткани во время первого хода, но не для прошивания скобками. Приводящий стержень 46 удерживается в его продольном положении после того, как подвижная рукоятка 24 отпущена, запирающим затвором 88, который поджат в фиксатор 53 в нижней части приводящего стержня 46. После отпускания подвижной рукоятки 24, приводящая собачка 42 проходит через рейку 48 в то время, как торсионная пружина 40 возвращает рукоятку 24 в положение на расстоянии от неподвижной рукоятки 22. В упомянутом положении приводящая собачка 42 поджимается в зацепление с зубчатой рейкой 48, чтобы дополнительно поддерживать приводящий стержень 46 в его продольно зафиксированном положении.
Чтобы «выполнить прошивку» скобками, установленными в кассетном узле 18 (т.е., вдавить скобки в скобкоформирующую наковальню 20), подвижную рукоятку 24 снова приводят в действие. В различных вариантах осуществления сшивающий скобками аппарат 10 может быть способен к работе с одноразовыми загрузочными модулями 16, 16', содержащими линейные ряды скобок от приблизительно 30 мм до приблизительно 60 мм. В данных конструктивных схемах сшивающий скобками аппарат 10 может быть выполнен так, чтобы каждый ход подвижной рукоятки 24 подавал приводящий стержень 46 на 15 мм. Так как один ход требуется для зажима ткани, то подвижной рукояткой 24 следует делать (n+1) ходов для прошивки скобками, где n равно частному от деления длины линейных рядов скобок в одноразовом загрузочном модуле, прикрепленном к сшивающему скобками аппарату 10, на 15 мм.
Прежде, чем можно будет произвести прошивку скобками, следует выполнить действие узлом 80 блокировки прошивки/отрезания, чтобы переместить запирающий затвор 88 из его блокирующего положения в неблокирующее положение. Указанный результат можно получить воздействием на стопорный штифт 82, чтобы привести кулачковую поверхность 85 в зацепление с боковыми стенками прорезями 89 фиксаторного элемента 83 и, тем самым, повернуть фиксаторный элемент 83 в направлении против часовой стрелки на фиг.9. После этого, можно выполнить соответствующее число ходов подвижной рукояткой 24, чтобы подать приводящий стержень 46 и, тем самым, шток 52 управления и приводную поперечину в дистальном направлении «DD», чтобы известным способом отработать одноразовым загрузочным модулем 16, 16'. Для отведения приводящего стержня 46 и, следовательно, штока 52 управления и элемента привода одноразового загрузочного модуля 16, 16' после сшивания скобками, головки 32a, 32b отведения можно оттянуть в проксимальном направлении, что вынуждает штифты 66 переместить расцепляющую планку 64 в направлении, указанном стрелкой «J» на фиг.7, через зубья 49 для вывода приводящей собачки 42 из зацепления с зубьями 49 зубчатой рейки 48.
Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что одноразовые загрузочные модули 16, 16' стерилизуются и упаковываются в стерильные упаковочные материалы перед использованием. Аналогично, сшивающий скобками аппарат 10 также стерилизуется перед использованием. После использования, одноразовый загрузочный модуль 16, 16' выбрасывают. Предполагается, что сшивающий скобками аппарат 10 можно также многократно стерилизовать для дополнительного использования, однако, известные инструменты, например, инструменты, описанные в вышеупомянутом патенте США №5865361, и другие известные инструменты, предназначенные для применения с одноразовыми загрузочными модулями, мало пригодны для простой разборки с целью удобной стерилизации различных внутренних компонентов. Следовательно, данные устройства часто отправляют в отходы после единственного применения. Как дополнительно подробно поясняется ниже, сшивающий скобками аппарат 10 конструктивно выполнен с возможностью удобной разборки, чтобы допускать многократную обработку (т.е. многократную стерилизацию) сшивающего скобками аппарата 10.
На фиг.12 показан сшивающий скобками аппарат 10 после того, как им воспользовались, и одноразовый загрузочный модуль (не показанный) отсоединили от аппарата (этап 700 на фиг.14). Пунктирная штриховка 620, 622 обозначает примерные зоны загрязнения на удлиненном корпусе 14 и узле 12 рукоятки, соответственно. Чтобы начать повторную обработку сшивающего скобками аппарата 10, пользователь перемещает кнопку 601 отключения блокировки срабатывания в проксимальном направлении и удерживает кнопку 601 отключения блокировки срабатывания в данном проксимальном положении (этап 702). Данный этап состоит в перемещении передаточного звена 182 чувствительного механизма в проксимальном направлении вышеописанным образом и дает пользователю возможность приводить в действие приводящий стержень 46. Кроме того, пользователь перемещает стопорный штифт 82, чтобы можно было периодически двигать подвижную рукоятку 24 для приведения в действие приводящего стержня 46. Затем пользователь многократно периодически двигает подвижную рукоятку 24 (по стрелке «R» на фиг.13), чтобы выдвинуть шток 52 управления так, что загрязненный участок 624 штока 52 управления продолжается из обоймы 124 (этап 704). Смотри фиг.13. Затем пользователь может вставить открытый загрязненный участок 624 штока 52 управления и дистальный конец обоймы 124 в соответствующий очищающий или стерилизующий материал 630, например, оксид, пероксид этилена и т.п. (этап 706). Смотри фиг.15.
Для стерилизации узла 12 рукоятки, узел 12 рукоятки можно легко разобрать (этап 708). Как показано на фиг.5, пользователь может разделить сегменты 28a и 28b поворотной головки снятием винтов или крепежных средств 29 (этап 710). Сегменты 28a и 28b поворотной головки, а также сдвигаемый элемент 138 снимают и откладывают (этап 712). Затем правую и левую головки 32a, 32b отведения стягивают с соединительного стержня 60 (этап 714). После этого, с левого участка 36b корпуса можно снять три быстроразъемных крепежных средства 400, если крепежные средства 400 не имеют свободного соединения с упомянутым участком (этап 716). Затем сегмент 36b корпуса рукоятки можно отложить (этап 718). После этого пользователь может взять приводной узел 500 прошивки/отрезания из сегмента 36a корпуса и положить его на плоскую поверхность (этап 720). Затем пользователь может захватить дистальный конец штока 52 управления и повернуть его вертикально (по стрелке «V» на фиг.5 - этап 722). После этого, шток 52 управления можно вытянуть из полости 47 в приводящем стержне 46, как показано на фиг.4 (этап 724). Затем пользователь может отсоединить цилиндр 178 чувствительного механизма от проксимального конца трубки 176 чувствительного механизма (этап 726). Таким образом, сшивающий скобками аппарат 10 можно разделить на части, показанные на фиг.4. После того, пользователь может выбрать желательный цикл очистки/стерилизации (этап 730). Смотри фиг.16. В частности, пользователь может выбирать между «мокрым» циклом очистки, при котором компоненты погружают в соответствующий очистной раствор 630 (фиг.17) или «сухим» циклом очистки, при котором применяют облучение, или можно применить сочетание обоих циклов. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что на фиг.17 показаны только некоторые из компонентов узла рукоятки, погружаемых в очищающий материал 630. Следует понимать, что предполагается погружение всех компонентов узла рукоятки либо одновременно (если контейнер является достаточно большим), либо по одному за раз, либо мелкими группами, пока все не произведена очистка всех компонентов (этап 732). Однако, следует понимать, что те компоненты, которые износились или получили повреждения, можно заменять новыми стерилизованными компонентами для выполнения сборки. Резервуар 632, содержащий очищающий материал 630, можно встряхивать, или очищающий материал можно перемешивать или иначе взбалтывать с использованием обычных способов для обеспечения прохода очищающего материала 630 через отверстия 511 во внутреннем рамном узле 510 в контакт со всеми компонентами, содержащимися внутри данного узла (этап 734). После того, как все компоненты подверглись действию очищающего материала 630 в течение требуемого времени, компоненты можно извлечь из очищающего материала 630 и затем высушить на воздухе или высушить с использованием других обычных способов (этап 736).
После того, как компоненты очищены очищающим материалом (этапы 732-736), пользователь может также выбрать способ облучения компонентов (этапы 740, 742), или пользователь может отказаться от облучения компонентов (этап 744), после чего пользователь может смазать некоторые компоненты (этап 746), как дополнительно подробно описано ниже. Если пользователь выбирает облучение разобранных компонентов либо после мокрой очистки компонентов, либо вместо мокрой очистки, то пользователь выложить все составные части на соответствующий лоток или другой объект (не показанный). Затем на компоненты можно направить излучение с использованием обычных методов облучения. Например, можно применить излучение электронного пучка. Возможно также использование других видов веществ для паровой стерилизации, например, паров этиленоксида, паров пероксида.
После того, как компоненты стерилизованы, некоторые компоненты можно смазать (этап 746). Как можно видеть на фиг.18, на различных компонентах инструкции 770 по смазке могут быть обеспечены рельефным или иным способом на внутреннем рамном узле 510. Как показано на фиг.18, на различные компоненты можно наносить стерильный смазочный материал, например, стеарат натрия.
Затем компоненты можно снова собрать в порядке, показанном на фиг.19. Для поддержки сборки компонентов можно воспользоваться стерильным монтажным элементом или лотком 790, который содержит ряд сопрягающихся полостей 792, 794. Смотри фиг.20. Один способ повторной сборки содержит этап 750, который заключается в укладке сегмента 28a поворотной головки в сопрягающуюся профилированную полость 792 в монтажном лотке 790. Головку 32a отведения можно уложить в сопрягающуюся полость 794 (этап 752). Первый сегмент 36a корпуса можно уложить в сопрягающуюся полость 796 (этап 754). Сдвигаемый элемент 138 можно уложить в правый сегмент 28a поворотной головки, при этом, штифт 166, прикрепленный к упомянутому элементу, вставлен в ступенчатую кулачковую прорезь 148 в кулачковом элементе 136, который установлен под фланцы 170, 172 в правом сегменте 28a поворотной головки (этап 756). Цилиндр 178 чувствительного механизма можно посадить на проксимальный конец штока 52 управления (этап 758). Узел 125 штока управления ориентирован вертикально, с направленным вверх дистальным концом. Цилиндр 178 чувствительного механизма удерживают на штоке 52 управления (этап 760). Проксимальный конец штока 52 управления вставляют в полость 47 в приводящем стержне 46 (этап 762). Затем узел 125 штока управления поворачивают вниз влево, чтобы выполнить соединение с приводящим стержнем 46 (этап 764). Цилиндр 178 чувствительного механизма поворачивают, пока лапка 544 не оказывается направленной вниз (этап 766). Соединенные приводной узел 500 прошивки/отрезания и узел 125 штока управления вставляют в правый сегмент 36a корпуса рукоятки и правый сегмент 28a поворотной головки в соответствующих полостях 798, 792, 796 в монтажном лотке 790. Фиксирующую лапку 544 на цилиндре 178 чувствительного механизма вставляют в вырез 542 в сдвигаемом элементе 138 (этап 768). Соединительный стержень 60 можно выставить для вставки в отверстие (не показанное) в правой головке 32a отведения (этап 770). Затем второй сегмент 36b корпуса рукоятки укладывают поверх собранного узла и выравнивают, чтобы быстроразъемные крепежные средства 400 могли соединить сегменты 36a, 36b корпуса рукоятки (этап 772). Сегмент 28b поворотной головки можно ориентировать так, чтобы состыковать с сегментом 28a поворотной головки и соединить с ним винтами 29 (этап 774). После этого левую головку 32b отведения можно запрессовать на стержень 60 отведения для выполнения сборки (этап 776).
Вышеописанный узел 80 блокировки прошивки/отрезания, а также узел блокировки прошивки/отрезания, описанный в вышеупомянутом патенте США №5865361, может представлять сложность для использования, так как врач должен прижать стопорный штифт 82, чтобы можно было приводить в действие приводящий стержень 46 периодическими действиями подвижной рукояткой 24. Данная конструкция обычно требует, чтобы врач пользовался обеими руками (одной рукой для удерживания узла рукоятки и работы подвижной рукояткой и другой рукой для прижатия стопорного штифта 82). Желательно располагать хирургическим сшивающим скобками аппаратом, который содержит более экономичную конструкцию рычага блокировки прошивки/отрезания, который не требует, чтобы врач пользовался обеими руками для приведения инструмента в действие. На фиг.21-33 изображен сшивающий скобками аппарат 810, который, по существу, аналогичен вышеописанному сшивающему скобками аппарату 10 или, возможно, по существу, аналогичен сшивающему скобками аппарату, описанному в патенте США №5865361, или другому известному хирургическому инструменту, который использует узел блокировки стопорным штифтом, за исключением того, сшивающий скобками аппарат 810 использует систему 880 блокировки прошивки/отрезания, которая намного удобнее в применении и не требует участия обеих рук для приведения инструмента в действие.
Как показано на фиг.21 и 22, узел 12 рукоятки содержит корпус 36 рукоятки, который предпочтительно сформирован из отформованных сегментов 36a и 36b корпуса рукоятки, которые совместно формируют неподвижный элемент 22 рукоятки и цилиндрический участок 26 узла 12 рукоятки. Подвижная рукоятка 824 может быть установлена с возможностью поворота между сегментами 36a и 36b корпуса рукоятки на шарнирном пальце 38. Смотри фиг.22. Поджимной элемент 40, который может содержать торсионную пружину, отжимает подвижную рукоятку 824 от неподвижной рукоятки 22. Приводящий стержень 46 может быть установлен внутри цилиндрического участка 26 корпуса 36 рукоятки и содержит рейку 48 с зубьями 49. Приводящая собачка 42, на которой имеется зуб 43 зацепления рейки, может быть установлена с возможностью поворота на шарнирном пальце 44 на одном конце подвижной рукоятки. Для поджима приводящей собачки 42 к рейке 48 на приводящем стержне можно применить поджимной элемент 50, который может содержать торсионную пружину. Когда подвижную рукоятку 824 приводят в действие (например, поворачивают), данная рукоятка перемещает приводящую собачку 42 так, что зуб 43 зацепления рейки зацепляет с возможностью привода зубчатую рейку 48 приводящего стержня 46 для линейной подачи приводящего стержня 46 в дистальном направлении «DD». Передний конец приводящего стержня 46 содержит полость 47, сформированную в данном стержне, для вмещения проксимального конца 53 штока 52 управления (фиг.23) таким образом, что линейная подача приводящего стержня 46 вызывает соответствующую линейную подачу штока 52 управления.
Сшивающий скобками аппарат 810 может дополнительно содержать запорную собачку 54, которая содержит фиксирующий рейку элемент 55, может быть установлена с возможностью поворота на шарнирном пальце 57 внутри корпуса 36 рукоятки и поджата к зубчатой рейке 48 поджимным элементом 56, который также предпочтительно является торсионной пружиной. Фиксирующий рейку выступ 55 запорной собачки 54 ориентирован для перемещения в полость 512 в приводящем стержне 46 таким образом, что, когда фиксирующий рейку выступ 55 находится в полости 512, приводящий стержень 46 удерживается в продольно фиксированном положении, если одноразовый загрузочный модуль не присоединен к сшивающему скобками аппарату 810.
Различные варианты осуществления могут также содержать механизм 58 отведения, который может содержать правую головку 32a отведения и левую головку 32b отведения, которые соединены с проксимальным концом приводящего стержня 46 соединительным стержнем 60. Смотри фиг.22. Соединительный стержень 60 может содержать правый и левый участки 62a и 62b зацепления для вмещения головок 32a и 32b отведения и центральный участок 62c, который выполнен в размер и по форме для поступательного перемещения внутри пары продольных прорезей 34a, соответственно сформированных в приводящем стержне 46 вблизи его проксимального конца. Расцепляющая планка 64 может быть соединена с возможностью функционирования с приводящим стержнем 46 и установлена для перемещения относительно упомянутого стержня при манипулировании головками 32a, 32b отведения. Пара пространственно разнесенных штифтов 66 может продолжаться наружу от боковой поверхности приводящего стержня 46 для сцепления с парой соответствующих наклонных кулачковых прорезей 68, сформированных в расцепляющей планке 64. После перемещения головок 32a, 32b отведения в проксимальном направлении «PD», штифты 66 могут отводить расцепляющую планку 64 вниз относительно приводящего стержня 46 и относительно зубчатой рейки 48 так, чтобы нижний участок расцепляющей планки 64 продолжался ниже зубчатой рейки 48 для отцепления зуба 43 зацепления рейки приводящей собачки 42 от зубчатой рейки 48. Прорезь 70 может быть сформирована на проксимальном конце расцепляющей планки 64 для вмещения центрального участка 62c соединительного стержня 60, и удлиненные прорези 34 образованы в цилиндрической секции 26 узла 12 рукоятки для обеспечения продольного поступательного перемещения соединительного стержня 60 в то время, когда головки 32a, 32b отведения оттягивают в проксимальном направлении «PD» для отведения приводящего стержня 46 и, следовательно, отведения назад штока 52 управления.
Сшивающий скобками аппарат 810 может дополнительно содержать передаточное звено 882 чувствительного механизма, которое может быть соединено с возможностью сдвига с сегментом 36a корпуса рукоятки штифтом или винтом 530, который продолжается сквозь прорезь 532 в передаточном звене 882 чувствительного механизма, так что передаточное звено 882 чувствительного механизма может продольно сдвигаться относительно корпуса 36 рукоятки. Дистальный конец пружины 531 может быть закреплен к винту 530, и проксимальный конец пружины 531 может быть зацеплен за скобку 533 на передаточном звене 882 чувствительного механизма. Смотри фиг.22. Пружина 531 служит для оттягивания передаточного звена 882 чувствительного механизма в дистальном направлении «DD». Передаточное звено 882 чувствительного механизма дополнительно содержит проксимальный фиксирующий рычаг 535, который содержит выступающий внутрь проксимальный конец 537, выполненный с возможностью взаимодействия с запорной собачкой 54. В частности, когда к инструменту 810 не присоединен одноразовый загрузочный модуль 16, 16', передаточное звено 882 чувствительного механизма оттянуто в дистальном направлении пружиной 531. В данном «ненагруженном» положении, проксимальный конец 537 проксимального фиксирующего рычага 535 не зацепляет запорную собачку 54 для удерживания запорной собачки 54 в положении фиксации, в котором фиксирующий выступ 55 вмещен в полость 512 и удерживает приводящий стержень 46 в продольно зафиксированном положении. Таким образом, если к инструменту 810 не присоединен одноразовый загрузочный модуль 16, 16', то инструмент 10 нельзя привести в действие.
Как показано на фиг.23, механизм обнаружения одноразового загрузочного модуля может продолжаться внутри сшивающего скобками аппарата 810 из удлиненного корпуса 14 в узел 12 рукоятки. Механизм обнаружения может содержать трубку 176 чувствительного механизма, которая установлена с возможностью сдвига в наружную обойму 124. Дистальный конец трубки 176 чувствительного механизма расположен по направлению к дистальному концу удлиненного корпуса 14, и проксимальный конец трубки 176 чувствительного механизма закреплен в дистальном конце цилиндра 178' чувствительного механизма парой выступов 180'. Дистальный конец передаточного звена 882 чувствительного механизма ориентирован в положение упора во фланец проксимального конца 190' цилиндра 178' чувствительного механизма.
Передаточное звено 882 чувствительного механизма может дополнительно содержать продолжающуюся вниз дистальную лапку 534, сформированную на данном звене, для контакта с фланцем 179, сформированном на цилиндре 178' чувствительного механизма. Смотри фиг.22 и 23. Как дополнительно подробно поясняется ниже, трубка 176 чувствительного механизма ориентирована для сопряжения с цилиндром 178' чувствительного механизма. Смотри фиг.23. Когда одноразовый загрузочный модуль 16, 16' присоединяют к дистальному концу удлиненного корпуса 14, одноразовый загрузочный модуль 16, 16' приходит в зацепление с дистальным концом трубки 176 чувствительного механизма и, тем самым, передвигает трубку 176 чувствительного механизма в проксимальном направлении, и, в результате, передвигает цилиндр 178 чувствительного механизма и передаточное звено 882 чувствительного механизма в проксимальном направлении. Когда передаточное звено 882 чувствительного механизма перемещается в проксимальном направлении, проксимальный конец 537 проксимального фиксирующего рычага 535 выполняет функцию поворота запорной собачки 54 таким образом, что фиксирующий выступ 55 выходит из полости 512 и, тем самым, позволяет привести в действие приводящий стержень.
В сшивающем скобками аппарате 810 может также применяться механизм 120 шарнирного поворота, тип и конструкция которого подробно описаны выше, со следующими обращающими внимание отличиями. В различных вариантах осуществления механизм 120 шарнирного поворота может быть установлен на поворотной головке 28 и содержать рычаг 30 шарнирного поворота, кулачковый элемент 136 и сдвигаемый элемент 138'. В различных вариантах осуществления сдвигаемый элемент 138' может содержать множество ребер 156, которые выполнены для вмещения с возможностью сдвига в канавки (не показанные), сформированные вдоль внутренних стенок поворотной головки 28. Сцепление между ребрами 156 и данными канавками не допускает поворота поворотной головки 28 и сдвигаемого элемента 138' друг относительного друга, при допуске их относительного линейного перемещения. Дистальный конец сдвигаемого элемента 138' может содержать консоль 160, которая содержит отверстие 162, выполненное с возможностью вмещения пальца 164, продолжающегося от проксимального конца передаточного звена 123 шарнирного поворота. Смотри фиг.23.
В собранном состоянии, проксимальный и дистальный ступенчатый участки 150 и 152 кулачкового элемента 136 расположены под фланцами 170 и 172, сформированными на поворотной головке 28, для ограничения перемещения кулачкового элемента 136 поперечным движением относительно продольной оси «L-L» сшивающего скобками аппарата 810. Когда рычаг 30 шарнирного поворота поворачивают вокруг шарнирного пальца 140, кулачковый элемент 136 поперечно перемещается на поворотной головке 28 и перемещает, при этом, ступенчатую кулачковую поверхность 148 (смотри фиг.11) поперечно штифту 166, и, тем самым, вынуждает штифт 166 перемещаться в проксимальном или дистальном направлении по ступенчатой кулачковой поверхности 148. Поскольку штифт 166 жестко прикреплен к сдвигаемому элементу 138', то сдвигаемый элемент 138' перемещается в проксимальном или дистальном направлении и вызывает соответствующее проксимальное или дистальное перемещение первого передаточного звена 123 шарнирного поворота. Смотри фиг.23 и 24.
Как также видно из фиг.24, кулачковый элемент 136 может содержать выемку 154. Стопорное кольцо 184, содержащее выступающий участок 186, выполненный с возможностью вмещения в выемку 154, расположено вокруг цилиндра 178' чувствительного механизма между участком 188' управляющего выступа и проксимальным фланцевым участком 190'. Смотри фиг.23. Пружина 192', расположенная между фланцевым участком 190' и стопорным кольцом 184, поджимает стопорное кольцо 184 в дистальном направлении на цилиндре 178 чувствительного механизма. Когда шарнирно-поворотный одноразовый загрузочный модуль 16, содержащий удлиненный концевой участок, вставляют в дистальный конец удлиненного корпуса 14 сшивающего скобками аппарата 810, вставной наконечник заставляет участок 188' управляющего выступа перемещаться в проксимальном направлении в зацепление со стопорным кольцом 184 и, тем самым, отодвигать стопорное кольцо 184 и выступающий участок 186 проксимально от выемки 154 в кулачковом элементе 136. При расположении выступающего участка 186 проксимально от выемки 154, кулачковый элемент 136 может свободно перемещаться в поперечном направлении и, тем самым, осуществлять шарнирный поворот сшивающего скобками аппарата 810. Другие нешарнирные одноразовые загрузочные модули могут быть без удлиненного вставного наконечника. По существу, когда к удлиненному корпусу 14 присоединяют нешарнирный одноразовый загрузочный модуль 16, цилиндр 178' чувствительного механизма не отводится в проксимальном направлении на расстояние, достаточное для вывода выступающего участка 186 из выемки 154. Следовательно, кулачковый элемент 136 заблокирован от поперечного перемещения выступающим участком 186 стопорного кольца 184, который расположен в выемке 154, и рычаг 30 шарнирного поворота застопорен в его центральном положении.
Как показано на фиг.23, дистальный конец удлиненного корпуса 14 может содержать механизм 900 блокировки штока управления, который может быть приведен в действие во время присоединения одноразового загрузочного модуля 16, 16' с дистальным концом удлиненного корпуса 14. Механизм 900 блокировки штока управления может содержать запирающую планку 902, которая поджимается в дистальном направлении пружиной 904 и содержит проксимальный палец 906, имеющий наклонную кулачковую поверхность 908. В различных вариантах осуществления возможно использование фиксатора 910 прошивного стержня, который содержит фиксирующую лапку 912, выступающую из него. Фиксирующая лапка 912 может быть выполнена с возможностью селективного зацепления за вырез 914 в штоке 52 управления. Фиксатор 910 прошивного стержня может быть снабжен поджимным элементом в форме пластинчатой пружины (не показанной) или чем-то подобным и содержать стопорный палец 916, продолжающийся из него. Пластинчатая пружина служит для поджима фиксатора 910 прошивного стержня наружу, когда проксимальный конец запирающей планки 902 выдвигается вперед в дистальное положение. Запирающая планка 902 может перемещаться из дистального положения, находящегося на расстоянии от фиксирующей лапки 912, в проксимальное положение, расположенное позади фиксирующей лапки 912. В проксимальном положении запирающая планка 902 вынуждает фиксирующую лапку 912 продолжаться сквозь прорезь 918 в трубке 176 чувствительного механизма в зацепление с вырезом 914 в штоке 52 управления.
Во время вставки одноразового загрузочного модуля 16, 16' в дистальный конец удлиненного корпуса 14, как дополнительно подробно поясняется ниже, кулачковая поверхность 908 запирающей планки 902 зацепляется выступом на одноразовом загрузочном модуле 16, 16', когда одноразовый загрузочный модуль 16, 16' поворачивают в зацепление с удлиненным корпусом 14, для перевода планки 902 в проксимальное положение. Фиксирующая лапка 912, которая расположена внутри выреза 914, удерживается в нем запирающей планкой 902 в то время, как выступ находится в зацеплении с кулачковой поверхностью 908 для предотвращения продольного перемещения штока 52 управления во время сборки. Когда одноразовый загрузочный модуль 16, 16' располагают относительно удлиненного корпуса 14 надлежащим образом, выступ на проксимальном конце одноразового загрузочного модуля 16, 16' сходит с кулачковой поверхности 908, что дает возможность пружине 904 вернуть запирающую планку 902 в ее дистальное положение и, тем самым, допускает последующее продольное перемещение штока 52 управления. Следует отметить, что, когда выступ одноразового загрузочного модуля сходит с кулачковой поверхности 908, может быть произведен ощутимый на слух щелчок или звук, указывающий, что одноразовый загрузочный модуль 16, 16' правильно закрепился к удлиненному корпусу 14.
Как видно из фиг.22, 25 и 26, в сшивающем скобками аппарате 810 можно применить усовершенствованный узел 880 блокировки прошивки/отрезания. В данном варианте осуществления подвижную рукоятку 824 можно снабдить полостью 930, выполненную в размер для вмещения проксимального участка курка 932 деблокировки прошивки/отрезания. Как можно видеть на данных фигурах, курок 932 деблокировки прошивки/отрезания может содержать выступ 934, сформированный на данном курке, и отпускающая пружина 936 может продолжаться между дном полости 930 и выступом 934 для приложения поджимного усилия к курку 932 деблокировки прошивки/отрезания в направлении «A». Как более подробно показано на фиг.26, курок 932 деблокировки прошивки/отрезания может иметь проксимальный задний участок 940, который выполнен в размер для продолжения с возможностью сдвига в прорезь 825, сформированную в подвижной рукоятке 824, когда курок деблокировки прошивки/отрезания нажимают в направлении «B». Усовершенствованный узел 880 блокировки прошивки/отрезания может дополнительно содержать зубчато-рычажный узел 950. В различных вариантах осуществления зубчато-рычажный узел 950 может содержать первое зубчатое колесо 952, которое установлено с возможностью поворота на оси 954 первого зубчатого колеса, которая закреплена на подвижной рукоятке 824. Первое зубчатое колесо 952 может содержать первый зубчатый сегмент 956, который предназначен для зубчатого зацепления с зубчатой рейкой 960 курка деблокировки, сформированной на заднем участке 940 курка 932 деблокировки прошивки/отрезания. Первое зубчатое колесо 952 может быть связано с собачкой 970 деблокировки первым соединительным звеном 972, которое соединено шарнирным пальцем или иным образом с возможностью поворота с первым зубчатым колесом 952 и собачкой 970 деблокировки. Как можно видеть на фиг.22 и 25, собачка 970 деблокировки может быть установлена с возможностью поворота на пальце 38.
В различных вариантах осуществления собачка 970 деблокировки может содержать участок 974 зацепления, который выполнен с возможностью зацепления за разъединительный палец 980, который прикреплен ко второму соединительному звену 982 и принуждается к движению только в дуговой прорези 826, сформированной в подвижной рукоятке 824. Из последующего текста настоящего подробного описания станет очевидно, что прорезь 826 предотвращает перемещение второго соединительного звена 982, при приведении в действие подвижной рукоятки 824. Второе соединительное звено 982 также может быть связано шарнирным пальцем или соединено с возможностью поворота с зубчатым колесом 990 затвора, которое установлено с возможностью поворота на ось 992 зубчатого колеса, которая установлена в сегментах 36a, 36b корпуса рукоятки. На зубчатом колесе 990 затвора содержится сегмент с зубьями 994 зубчатого колеса, ориентированный для зубчатого зацепления с зубчатой рейкой 998 затвора, сформированной на запирающем затворе 996. В запирающем затворе 996 может быть выполнена прорезь 997 для вмещения участка 1002 пружины 1000 затвора, которая опирается на штифт 1004 затвора, который продолжается между сегментами 36a, 36b корпуса рукоятки. Пружина 1000 затвора служит для поджима запирающего затвора 996 в направлении «C». Смотри фиг.26.
Ниже, со ссылками на фиг.27-30, приведено описание работы системы 880 блокировки прошивки/отрезания. На фиг.27 показан сшивающий скобками аппарат 810 до зажима ткани в одноразовом загрузочном модуле (не показанном). Как можно видеть на данной фигуре, на данном этапе работы участок 974 зацепления собачки 970 деблокировки не находится в контакте с разъединительным пальцем 980. Как также можно видеть, верхний конец запирающего затвора 996 находится на дистальном конце приводящего стержня 46. На фиг.28 показано первое приведение в действие подвижной рукоятки 824, чтобы привести скобкоформирующую наковальню одноразового загрузочного модуля к смыканию вышеописанным образом. Врач еще не нажимал курок 932 деблокировки прошивки/отрезания и удобно расположил свой указательный палец позади приводящего участка 933 курка 932 деблокировки прошивки/отрезания. При приведении подвижной рукоятки 824 в действие, приводящий стержень 46 перемещается в дистальном направлении «DD» приводящей собачкой 42 вышеописанным образом. Как можно видеть из фиг.28, приводящий стержень 46 переместился в положение, в котором конец запирающего затвора 996 вошел в упорный фиксатор 53 в приводящем стержне 46 и соответствующий упорный фиксатор 53' в расцепляющей планке 64. Как более понятно из рассмотрения фиг.25, верхний конец запирающего затвора 996 содержит сформированный на нем скошенный или сужающийся участок 999, который сходится с вертикально продолжающейся проксимальной стороной 1005 запирающего затвора 996. Как также можно видеть на фиг.25, упорный фиксатор 53 в приводящем стержне 46 содержит наклонные поверхности 1006, 1007, а также участок 1008 вертикального уступа. Когда верхний конец запирающего затвора 996 полностью поджат в упорный фиксатор 53 пружиной 1000 затвора, проксимальная сторона 1005 запирающего затвора 996 расположена напротив вертикального уступа 1008 в приводящем стержне 46 для предотвращения, тем самым, перемещения приводящего стержня 46. Однако, когда запирающий затвор 996 оттягивается в направлении «D», наклонные поверхности 1006, 1007, а также скошенная поверхность 999 на запирающем затворе 996, дают возможность приводящему стержню 46 продольно продвинуться за запирающий затвор 996, без полного отжимания запирающего затвора 996 из контакта с приводящим стержнем 46.
Как показано на фиг.28, в описанном положении, прорезь 826 в подвижной рукоятке 824 допускала подтягивание подвижной рукоятки к неподвижному участку 22 рукоятки, без принуждения разъединительного пальца 980 к перемещению второго соединительного звена 982, которое, в свою очередь, приводило бы в действие запирающий затвор 996. Как можно видеть на фиг.28, пружина 1000 поджала запирающий затвор 996 в положение блокировки, в котором запирающий затвор 996 вмещен в упорные фиксаторы 53, 53', и проксимальная поверхность 998 затвора находится напротив вертикального уступа 1008 в приводящем стержне 46. После того, как подвижная рукоятка 824 была оттянута в первое положение, показанное на фиг.28, для смыкания скобкоформирующей наковальни, врач дает подвижной рукоятке 824 переместиться в положение, показанное на фиг.29, под действием поджимного усилия пружины 40 запирания рукоятки. На данном этапе, головки 32a, 32b отведения можно оттянуть в проксимальном направлении, чтобы заставить скобкоформирующую наковальню разжать ткань в том случае, если врач намерен выполнить повторную манипуляцию инструментом 17, или врач может начать цикл прошивки/отрезания захватом своим указательным пальцем приводящего участка 933 курка 932 деблокировки прошивки/отрезания, как показано на фиг.30.
На фиг.31 показано, что врач нажал курок 932 деблокировки прошивки/отрезания. Данное действие приводит зубчатую рейку 960 курка деблокировки на заднем участке 940 курка деблокировки в зацепление с первым зубчатым сегментом 956 на первом зубчатом колесе 952 и, тем самым, вынуждает первое зубчатое колесо 952 поворачиваться в направлении против часовой стрелки «CCW». Когда первое зубчатое колесо 952 поворачивается в направлении против часовой стрелки, оно толкает первое соединительное звено 972 в направлении «E», вынуждает собачку 970 деблокировки поворачиваться в направлении по часовой стрелки «C». Когда собачка 970 деблокировки поворачивается в направлении «C», поверхность 974 зацепления контактирует с разъединительным пальцем 980 и перемещает второе соединительное звено 982 в направлении «F». Когда второе соединительное звено 982 перемещается в направлении «F», оно вынуждает зубчатое колесо 990 затвора поворачиваться в направлении против часовой стрелки «CCW». Зубья 994 зубчатого колеса на зубчатом колесе 990 затвора находятся в зацеплении с зубчатой рейкой 998 затвора и перемещают запирающий затвор 996 в направлении «D» из запирающего зацепления с упорными фиксаторами 53, 53'.
На фиг.32 показано положение запирающего затвора 996 относительно приводящего стержня 46, когда приводящий стержень 46 начинает перемещаться в дистальном направлении «DD» при приведении в действие подвижной рукоятки 824. Как можно видеть на данной фигуре, верхний скошенный участок 999 запирающего затвора 996 находится, при этом, в контакте с вертикальной кромкой 1005 в приводящем стержне 46 и дает возможность приводящему стержню 46 перемещаться в дистальном направлении. На фиг.33 показано окончание первого прошивного/отрезного хода подвижной рукоятки 824. Как можно видеть на данной фигуре, верхний конец запирающего затвора 996 скользит по низу приводящего стержня 46 и пластины 64, когда приводящий стержень 46 подается в дистальном направлении «DD». Проксимальный конец звена 982 переместился к проксимальному концу прорези 826 во время данного хода.
На фиг.34 показан альтернативный вариант осуществления сшивающего скобками аппарата 810', в котором применяется альтернативный узел 880' блокировки прошивки/отрезания, который может быть, по существу, аналогичен вышеописанному узлу 880 блокировки прошивки/отрезания, за исключением отмеченных ниже отличий. В частности, в узле 880' блокировки прошивки/отрезания применяется гибкая планка 1020, которая заключена для перемещения в змеевидном проходе 828, сформированном в подвижной рукоятке 824'. Гибкая планка 1020 заменяет первое зубчатое колесо 952, первое соединительное звено 972 и собачку 970 деблокировки. Один конец гибкой планки 1020 соединен с курком 932 деблокировки прошивки/отрезания, и другой конец гибкой планки 1020 принуждается к контакту с разъединительным пальцем 980, который также вынужден перемещаться только в прорези 828. Следовательно, когда нажимают курок 932 деблокировки прошивки/отрезания, гибкая планка 1020 толкает разъединительный палец 980, который заставляет второе соединительное звено 982 перемещаться в направлении «F». Когда второе соединительное звено 982 перемещается в направлении «F», зубчатое колесо 990 затвора перемещается в направлении против часовой стрелки «CCW» и перемещает запирающий затвор 996 в направлении «D». Когда врач отпускает курок 932 деблокировки прошивки/отрезания, отпускающая пружина 936 перемещает курок 932 деблокировки прошивки/отрезания в направлении «A», с оттягиванием, тем самым, гибкой планки 1020 от разъединительного пальца 980, что дает возможность разъединительному пальцу 980 свободно перемещаться в прорези 828. Когда разъединительный палец 980 освобождается, пружина 1000 затвора может поджимать запирающий затвор 996 в направлении «C». Когда запирающий затвор 996 поджат в направлении «C», зубчатое колесо 990 затвора свободно перемещается в направлении по часовой стрелке «C». Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что вышеописанные конструкции систем 880, 880' блокировки прошивки/отрезания позволяют врачу манипулировать инструментами одной рукой. Данное решение является значительным усовершенствованием по сравнению с системами блокировки прошивки/отрезания, описанными в патенте США № 5,865,361 и другими известными сшивающими скобками аппаратами, выполненными для работы с одноразовыми загрузочными модулями.
На фиг.35-46 показан хирургический сшивающий скобками аппарат 1210, который предназначен для решения, по меньшей мере, некоторых из вышеупомянутых проблем, связанных с известными хирургическими сшивающими скобками аппаратами, которые предназначены для работы с шарнирно-поворачиваемыми одноразовыми загрузочными модулями. В частности, и как показано на фиг.35, хирургический сшивающий скобками аппарат 1210 может быть, по существу, аналогичен по конструкции различным вышеописанным инструментам, за исключением селективно фиксируемой системы 1220 поворота и системы 1320 шарнирного поворота (фиг.36), как подробнее поясняется ниже. Компоненты, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления, обозначаются ниже идентичными позициями элементов, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов.
В одном варианте осуществления хирургический сшивающий скобками аппарат 1210 может содержать узел 12 рукоятки, который содержит удлиненный корпус 14, который соединен с возможностью функционирования с упомянутым узлом и дистально выступает из него. Дистальный конец удлиненного корпуса 14 может соединяться с шарнирно-поворачиваемым одноразовым загрузочным модулем 16. Одноразовый загрузочный модуль 16 может содержать инструментальный узел 17, который допускает его селективный шарнирный поворот вокруг оси «A1-A1» шарнирно-поворотными движениями, передаваемыми известным образом в данный узел посредством удлиненного корпуса 14. Смотри фиг.35. В различных вариантах осуществления настоящего изобретения проксимальный конец удлиненного корпуса 14 может быть присоединен к поворотному кожуху 1260, который соединен с корпусом 36' рукоятки. Как можно видеть на фиг.36, 44 и 45, корпус 36' рукоятки может содержать кольцевой паз 117, выполненный с возможностью вмещения кольцевого пояска 1262, сформированного на проксимальном конце поворотного кожуха 1260, который предпочтительно сформирован из отформованных сегментов 1260a и 1260b кожуха. Кольцевой паз 117 и поясок 1262 создают возможность поворота кожуха 1260 относительно корпуса 36' рукоятки. Поворот поворотного кожуха 1260 вынуждает удлиненный корпус 14 и одноразовый загрузочный модуль, закрепленный к нему, поворачиваться вокруг продольной оси «L-L», определяемой удлиненным корпусом 14. Различные варианты осуществления хирургического сшивающего скобками аппарата 1210 могут содержать селективно фиксируемую систему 1220 поворота, чтобы селективно фиксировать поворотный кожух 1260 для предотвращения его поворота (а также поворота удлиненного корпуса 14 и одноразового загрузочного модуля 16) относительно узла 12 рукоятки вокруг продольной оси «L-L».
В различных вариантах осуществления фиксируемая система 1220 поворота может содержать цилиндрическую дистальную крышку 1222, сформированную или иначе обеспеченную на дистальном конце корпуса 36' рукоятки. На фиг.36 изображен сегмент 36a' корпуса для корпуса 36' рукоятки, который содержит один сегмент 1222a крышки, сформированный на упомянутом сегменте. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что сегмент 36b' корпуса для корпуса 36' рукоятки содержит ответный сегмент 1222b крышки, сформированный на упомянутом сегменте, который взаимодействует с сегментом 1222a крышки для формирования дистальной крышки 1222. Смотри фиг.40.
Фиксируемая система 1220 поворота может дополнительно содержать тормозную систему 1229. В частности, сегмент 1222a крышки может содержать внутреннюю шлицевую секцию 1224a, и сегмент 1222b крышки может содержать внутреннюю шлицевую секцию 1224b. Внутренние шлицевые секции 1224a, 1224b совместно формируют внутреннюю шлицевую секцию 1224, которая выполнена с возможностью поддержки тормозной трубки 1230 тормозной системы 1229. В различных вариантах осуществления тормозная трубка 1230 содержит внешние шлицы 1232, которые сформированы на данной трубке в размер для вмещения во внутренние шлицы 1224 в дистальной крышке 1222 таким образом, что тормозная трубка 1230 может перемещаться аксиально относительно дистальной крышки 1222, но закреплена от поворота относительно нее. Тормозная система 1229 может дополнительно содержать тормозной бандаж 1240, который взаимодействует со штифтом 1250 тормозного рычага, который установлен с возможностью функционирования в поворотный кожух 1260. Дополнительное подробное описание работы штифта 1250 тормозного рычага и тормозного бандажа 1240 приведено ниже.
Тормозная трубка 1230 может перемещаться аксиально относительно цилиндрической дистальной крышки 1222 посредством переключающей планки 1270, которая имеет рабочее соединение с узлом 1290 селекторного переключателя. Как можно видеть на фиг.36, переключающая планка 1270 содержит проксимальный конец 1272 и дистальный конец 1276. Проксимальный конец 1272 может иметь отверстие 1274 для вмещения стержневого участка 1294 селекторного переключателя 1292. Стержневой участок 1294 продолжается сквозь отверстие 1274 в переключающей планке 1270 и закрепляется к данной планке поперечным штифтом 1296. Кроме того, селекторный переключатель 1292 может содержать крепежный штифт 1298, который соединяет с возможностью поворота стержневой участок 1294 к корпусу 36'. Для фиксации селекторного переключателя 1292 в заданном положении можно воспользоваться фиксирующей пружиной 1300. Фиксирующая пружина 1300 может содержать выпуклый участок 1302, который выполнен с возможностью зацепления поперечным штифтом 1296, когда селекторный переключатель 1292 поворачивают в дистальном и проксимальном направлениях вокруг оси «SA-SA», образованной крепежным штифтом 1298. Смотри фиг.36. Следовательно, когда селекторный переключатель 1292 поворачивают в проксимальное положение (фиг.42, 43 и 46), и когда селекторный переключатель 1292 поворачивают в дистальное положение (фиг.37, 38, 41 и 45), выпуклый участок 1302 пружины 1300 удерживает селекторный переключатель 1292 и переключающую планку 1270 в заданном положении.
Как показано на фиг.36, дистальный конец 1276 переключающей планки 1270 может содержать выступающий из него соединительный штифт 1278, который выполнен с возможностью присоединения переключающей планки 1270 к тормозной трубке 1230. Смотри фиг.38. Таким образом, линейное перемещение переключающей планки в проксимальном направлении «PD» и дистальном направлении «DD» вынуждает тормозную трубку 1230 также перемещаться в данных направлениях внутри участка 1222 цилиндрической дистальной крышки. Как также можно видеть на фиг.36-39 и 41-46, дистальный конец 1276 переключающей планки 1270 может дополнительно содержать задвижку 1280, сформированную на данной планке или прикрепленную к ней. Задвижка 1280 выполнена с возможностью селективного сцепления с кольцом 1264 блокировки поворота, которое содержит ряд зубьев 1266, сформированных или иначе обеспеченных на кольцевом пояске 1262. Как можно видеть на фиг.36, кольцевой паз 117 в цилиндрической дистальной крышке 1222 сформирован продолжающимся внутрь фланцем 1226, который содержит проходящую сквозь него канавку 1228 для вмещения через нее дистального конца 1276 переключающей планки 1270. Таким образом, как дополнительно в подробностях поясняется ниже, когда переключающую планку 1270 перемещают в дистальном направлении «DD», задвижку 1280 можно привести в зацепление с зубьями 1266 кольца 1264 блокировки поворота кожуха 1260 для предотвращения, тем самым, поворота кожуха 1260 относительно крышки 1222 и корпуса 36. Смотри фиг.44.
Различные варианты осуществления хирургического сшивающего скобками аппарата 1210 могут дополнительно содержать оригинальную новую систему 1320 шарнирного поворота, которая, как поясняется ниже, сопрягается с компонентами, формирующими удлиненный корпус 14, чтобы селективно подавать в упомянутую систему шарнирно-поворотные движения для передачи в одноразовый загрузочный модуль 16. Система 1320 шарнирного поворота может содержать сдвигаемый элемент 138'. Например, сдвигаемый элемент 138' может содержать ребра 156, который выполнения для вмещения с возможностью сдвига в канавки 1261, сформированные вдоль внутренних стенок кожуха 1260. Сцепление между ребрами 156 и данными канавками 1261 (фиг.36 и 37) не допускает поворота сдвигаемого элемента 138' относительно кожуха 1260, но, при этом, допускает относительное линейное перемещение данных компонентов. Дистальный конец сдвигаемого элемента 138' может содержать консоль 160, которая содержит отверстие 162, выполненное с возможностью вмещения пальца 164, продолжающегося от проксимального конца передаточного звена 123 шарнирного поворота. Смотри фиг.37. Кроме того, в данном варианте осуществления сдвигаемый элемент 138' содержит выступающий из него штифт 166 шарнирного поворота, который продолжается через прорезь 1265 шарнирного поворота в кожух 1260 шарнирного поворота. Штифт 166 шарнирного поворота вмещен в отверстие 1324 (фиг.36), сформированное в захвате системы 1320 линейного шарнирного поворота и вращения, который посажен на кожух 1260. Система шарнирного поворота может дополнительно содержать захват 1322 для линейного шарнирного поворота и вращения, который может быть из двух сегментов 1322a, 1322b захвата, которые соединяются вокруг кожуха 1260. Отверстия 1324 могут быть обеспечены в сегменте 1322a захвата, как показано на фиг.36. Следовательно, когда врач перемещает захват 1322 аксиально в проксимальном направлении «PD» и дистальном направлении «DD», сдвигаемый элемент 138', а также передаточное звено 123 шарнирного поворота перемещаются в данных направлениях с приведением, тем самым, в исполнение шарнирного поворота шарнирно-поворачиваемого одноразового загрузочного модуля.
Кроме того, в данном варианте осуществления тормозная система 1229 может быть выполнена с возможностью предотвращения приведения в действие системы 1320 шарнирного поворота. Например, как также показано на фиг.36, тормозной бандаж 1240 может быть выполнен с возможностью вмещения между разнесенными упорными фланцами 1267, сформированными на внешней стороне кожуха 1260 для формирования канавки 1269 под тормозной бандаж. Как можно видеть на фиг.36, тормозной бандаж 1240 не образует сплошного кольца; концы 1242 тормозного бандажа 1240 расположены с разнесением один против другого, с образованием между ними вмещающего кулачок отверстия 1244. Тормозной бандаж 1240 установлен внутри канавки 1269 под тормозной бандаж так, чтобы кулачковое отверстие 1242 было ориентировано для вмещения в него тормозного кулачка 1330. К тормозному кулачку 1330 прикреплен штифт 1332 перемещения тормозного рычага, который продолжается сквозь отверстие 1334 тормозного кулачка в кожухе 1260. Как можно видеть на фиг.37, штифт 1332 перемещения тормозного рычага выполнен с возможностью вмещения в канавку 1234 перемещения, сформированную в дистальном конце тормозной трубки 1230. В захвате 1322 для линейного шарнирного поворота и вращения, который содержит участок системы 1320 шарнирного поворота, содержится поднутренная зона 1326, чтобы захват 1320 мог перемещаться аксиально относительно кожуха 1260. В различных вариантах осуществления сегмент 1322a захвата может быть снабжен рядом стопоров 1328, которые выполнены с возможностью зацепления индикаторного пальца 1263 (фиг.41), выступающего из кожуха 1260, чтобы, когда захват 1320 аксиально перемещают по кожуху 1260, индикаторный палец 1263 производил ощутимый на слух щелчок или звук, когда индикаторный палец входит в зацепление со стопором 1328. На приведенной фигуре изображены пять стопоров 1328; возможно также использование другого числа стопоров 1328.
Ниже, со ссылками на фиг.37-39, 41 и 42-44, приведено описание работы хирургического сшивающего скобками аппарата 1210. На фиг.37-39 изображен сшивающий скобками аппарат 1210 в режиме «поворота», в котором наружную обойму 124 можно селективно поворачивать вокруг продольной оси «L-L». Как можно видеть на фиг.37 и 38, селекторный переключатель 1292 повернут в дистальное положение, в котором переключающая планка 1270 вытянута в проксимальном направлении «PD». Когда переключающая планка 1270 вытянута в проксимальном направлении, задвижка 1280 поворота расцеплена с кольцом 1264 блокировки поворота (фиг.39) и, тем самым, допускает поворот кожуха 1260 вокруг продольной оси «L-L». Как изложено выше, проксимальный конец обоймы 124 содержит диаметрально противоположные отверстия 128, которые выполнены в размер для вмещения радиальных выступов 132, сформированных внутри дистального конца кожуха 1260. Смотри фиг.36 и 38. Выступы 132 и отверстия 128 жестко фиксируют кожух 1260 и удлиненный корпус 14 один к другому, как от продольного, так и от поворотного перемещения. Следовательно, поворот кожуха 1260 относительно узла 12 рукоятки приводит к соответствующему повороту удлиненного корпуса 14 вокруг продольной оси L-L относительно узла 12 рукоятки. Кроме того, так как переключающая планка 1270 соединена с тормозной трубкой 1230 соединительным штифтом 1278, когда переключающую планку 1270 перемещают в проксимальном направлении «PD», тормозная трубка 1230 также перемещается в проксимальном направлении внутри цилиндрической дистальной крышки 1222. Как пояснялось выше, штифт 1332 перемещения тормозного кулачка 1330 вмещается в канавку 1234 перемещения в тормозной трубке 1230. Когда тормозная трубка 1230 перемещается в проксимальном направлении, штифт 1332 перемещения, который является дистальным конструктивным элементом радиального рычага, который, в свою очередь, жестко прикреплен к штифту 1250, поворачивает тормозной кулачок 1330 так, что он разжимает концы 1242 тормозного бандажа 1240 радиально наружу, чтобы фиксировать захват 1322 для линейного шарнирного поворота и вращения к кожуху 1260. Тормозной бандаж 1240 препятствует аксиальному перемещению захвата 1322 на кожухе 1260; однако, поворот захвата 1322 вызывает поворот кожуха 1260 вокруг оси «L-L». Таким образом, когда селекторный переключатель 1292 повернут в дистальном направлении, удлиненный корпус 14 и присоединенный к нему одноразовый загрузочный модуль можно повернуть вокруг продольной оси «L-L» путем поворота захвата 1320.
Когда врач намерен шарнирно повернуть одноразовый загрузочный модуль, селекторный переключатель 1292 поворачивают в проксимальном направлении «PD», показанном на фиг.42, 43 и 46. Как можно видеть на фиг.42, 43 и 46, когда селекторный переключатель 1292 поворачивают в проксимальном направлении, переключающая планка 1270 подается аксиально в дистальном направлении «D-D», с приведением задвижки 1280 поворота в стопорное зацепление с кольцом 1264 блокировки поворота. Когда задвижка 1280 поворота находится в зацеплении с кольцом 1264 блокировки поворота, кожух 1260 (и удлиненный корпус 14 и обойма 124) не могут поворачиваться относительно узла 12 рукоятки вокруг продольной оси «L-L». Когда переключающая планка 1270 перемещается в дистальном направлении, тормозная трубка 1230 также перемещается в дистальном направлении «D-D», так как переключающая планка 1270 прикреплена к упомянутой трубке. Когда тормозная трубка 1230 перемещается в проксимальном направлении, штифт 1332 перемещения 1332 приводится в поворотное движение и поворачивает тормозной кулачок 1330 так, что он позволяет концам 1242 тормозного бандажа 1240 сдвигаться внутрь друг к другу, чтобы, тем самым, дать возможность захвату 1320 перемещаться относительно кожуха 1260. Смотри фиг.46. В различных вариантах осуществления штифт 166 шарнирного поворота продолжается из сдвигаемого элемента 138' сквозь прорезь 1265 в сегмент 1260a кожуха и вмещается в отверстие 1324 в сегменте 1322a захвата. Смотри фиг.36 и 37. Таким образом, когда врач перемещает захват 1322 поворота аксиально в проксимальном направлении «PD» и дистальном направлении «DD», сдвигаемый элемент 138', а также передаточное звено 123 шарнирного поворота, которое прикреплено к нему консолью 160, также перемещаются. Таким образом, когда врач перемещает захват 1322 поворота аксиально в проксимальном направлении «PD» и дистальном направлении «DD», сдвигаемый элемент 138', а также передаточное звено 123 шарнирного поворота также перемещаются в упомянутых направлениях для осуществления шарнирного поворота шарнирно-поворачиваемого одноразового загрузочного модуля. Кроме того, когда захват 1322 аксиально перемещают на кожухе 1260, индикаторный палец 1263 производит ощутимый на слух щелчок или звук, когда он входит в зацепление со стопорами 1328 для снабжения врача звуковым указанием о совершении шарнирно-поворотного движения.
На фиг.46 показано применение сдвигаемого элемента 138, который содержит выступающий вверх консольный участок 540 и консоль 546, который содержит отверстие 548, выполненное с возможностью вмещения пальца (не показанного), продолжающегося из проксимального конца передаточного звена 123 шарнирного поворота (не показанного). Смотри фиг.4 и 11. Штифт 166 прикреплен к сдвигаемому элементу 138 и выполнен в размер для продолжения сквозь прорезь 1265 в кожухе и в отверстие 1324 в захвате 1322. В другом отношении настоящий вариант осуществления работает аналогично вариантам осуществления, показанным на фиг.37 и 38. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что вышеописанный вариант осуществления представляет значительное усовершенствование по сравнению с известными инструментами, предназначенными для применения с такими одноразовыми загрузочными модулями, которые описаны в патенте США №5865361. В частности, в вышеописанных вариантах осуществления врач может поворачивать одноразовый загрузочный модуль в требуемое положение и затем фиксировать кожух 1260 для предотвращения дополнительного поворота кожуха 1260. Затем врач может шарнирно поворачивать одноразовый загрузочный модуль, пока кожух 1260 остается зафиксировать в заданном положении. В известных модулях поворотная головка могла свободно поворачиваться в то время, как врач производил шарнирный поворот одноразового загрузочного модуля. Таким образом, для предотвращения поворота одноразового загрузочного модуля, врач должен быть манипулировать рычагом шарнирного поворота с осторожностью, чтобы не сообщить поворотное движение поворотной головке. Вышеописанные варианты осуществления решают данную проблему.
На фиг.47-51 показан другой хирургический сшивающий скобками аппарат 1410 в соответствии с настоящим изобретением, конструктивно предназначенный для применения с одноразовым загрузочным модулем (не показанным), который позволяет врачу шарнирно поворачивать одноразовый загрузочный модуль и выполнять им прошивку/отрезание одной рукой. В частности, и со ссылкой на фиг.47, хирургический инструмент 1410, по существу, аналогичен по конструкции различным вышеописанным инструментам, за исключением системы 1420 шарнирного поворота, как подробно поясняется ниже. Компоненты, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления, обозначаются ниже идентичными позициями, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов.
В одном варианте осуществления хирургический сшивающий скобками аппарат 1410 может содержать узел 12 рукоятки, который содержит удлиненный корпус 14, который соединен с возможностью функционирования с узлом 12 рукоятки и дистально выступает из него. Дистальный конец удлиненного корпуса 14 может соединяться с шарнирно-поворачиваемым одноразовым загрузочным модулем 16. Одноразовый загрузочный модуль может содержать инструментальный узел 17, который допускает его селективный шарнирный поворот вокруг оси «AA-AA» шарнирного поворота шарнирно-поворотными движениями, передаваемыми известным образом в упомянутый узел посредством удлиненного корпуса 14.
Узел 12 рукоятки может содержать корпус 36 рукоятки и содержать подвижную рукоятку 24, которая соединена с возможностью функционирования с упомянутым корпусом и может совершать движения в виде рабочих ходов относительно корпуса 36 рукоятки. Как в вышеописанных вариантах осуществления, приведение в действие подвижной рукоятки 24 может вызывать продольные приводные движения приводящего стержня 46, который соединен с возможностью функционирования со штоком 52 управления, который содержит участок удлиненного корпуса 14. Как можно видеть из фиг.48-51, система 1420 шарнирного поворота может содержать рычаг 1422 шарнирного поворота, который может быть выполнен по форме и ориентирован относительно неподвижного участка 22 корпуса 36 рукоятки и подвижной рукоятки 24 так, чтобы врач мог приводить упомянутый рычаг в действие своим указательным пальцем руки, которая захватывает узел 12 рукоятки, и которая приводит в действие подвижную рукоятку 24. Рычаг 1422 шарнирного поворота может содержать соединенный с ним участок 1424 приводной штанги, который содержит вертикальный участок 1426, который шарнирно соединен с корпусом 36 рукоятки на шарнирном пальце 1428 так, что рычаг 1422 шарнирного поворота можно селективно поворачивать в направлениях «G» и «H» на шарнирном пальце 1428. Смотри фиг.49. Участок 1424 приводной штанги может дополнительно содержать приводной участок 1430, в котором содержится прорезь 1432, выполненная с возможностью вмещения приводного штифта 1434, закрепленного на тяге 1440 шарнирного поворота. Как можно видеть на фиг.49, тяга 1440 шарнирного поворота может быть снабжена парой удлиненных прорезей 1442, 1444, которые выполнены с возможностью вмещения участков винтов 1450, 1452, соответственно. Винты 1450, 1452 продолжаются сквозь удлиненные прорези 1442, 1444, соответственно, и прикреплены сегменту 36a корпуса рукоятки так, что тяга 1440 шарнирного поворота принуждается к продольному перемещению внутри корпуса 36 рукоятки в проксимальном направлении «PD» и дистальном направлении «DD». Дистальный конец тяги 1440 шарнирного поворота может содержать штифт 1446 шарнирного поворота, который выполнен с возможностью продолжению в кольцевую канавку 139'', обеспеченную в проксимальном конце сдвигаемого элемента 138'', который в других отношениях может быть идентичным по конструкции и принципу действия сдвигаемому элементу 138', подробно описанному выше. То есть, сдвигаемый элемент 138'' может содержать множество ребер 156, которые выполнены для вмещения с возможностью сдвига в канавки, сформированные вдоль внутренних стенок поворотной головки 28''. Сцепление между ребрами 156 и данными канавками не допускает поворота сдвигаемого элемента 138'' и поворотной головки 28'' друг относительного друга, при допуске относительного линейного перемещения между данными компонентами. Дистальный конец сдвигаемого элемента 138'' может содержать консоль 160, которая содержит отверстие 162, выполненное с возможностью вмещения пальца 164, продолжающегося из проксимального конца передаточного звена 123 шарнирного поворота. Смотри фиг.48 и 49. Следовательно, когда врач приводит в действие рычаг 1422 шарнирного поворота в направлении «G», приводной участок 1430 оттягивает тягу 1440 шарнирного поворота в проксимальном направлении «PD», которая оттягивает сдвигаемый элемент 138'' и передаточное звено 123 шарнирного поворота, прикрепленное к нему, в проксимальном направлении «PD», которое может, тем самым, принудить одноразовый загрузочный модуль, соединенный с упомянутым звеном, шарнирно повернуться в направлении вправо таким образом, как изложено выше и поясняется в дальнейшем. Когда врач подтягивает рычаг 1422 шарнирного поворота в направлении «H», приводной участок 1430 толкает тягу 1440 шарнирного поворота в дистальном направлении «DD», которая также толкает сдвигаемый элемент 138” и передаточное звено 123 шарнирного поворота, прикрепленное к нему, в дистальном направлении «DD», которое может, тем самым, принудить одноразовый загрузочный модуль, соединенный с упомянутым звеном, шарнирно повернуться в направлении влево.
Как указано выше, данный вариант осуществления может содержать цилиндр 178' чувствительного механизма, который сопрягается с трубкой 176 чувствительного механизма и передаточным звеном 182 чувствительного механизма, как пояснялось выше, чтобы обнаруживать, присоединен ли одноразовый загрузочный модуль к штоку 52 управления и не допускать приведения в действие механизма 1420 шарнирного поворота, когда одноразовый загрузочный модуль не присоединен. Однако, в данном варианте осуществления фланец 190' цилиндра 178' чувствительного механизма выполнен с возможностью взаимодействия с выступом 1448 блокировки по «отсутствию загрузки», сформированным на тяге 1440 шарнирного поворота. Смотри фиг.50 и 51. Когда одноразовый загрузочный модуль не присоединен к удлиненному корпусу 14 и штоку 52 управления, цилиндр 178' чувствительного механизма поджат в положение, показанное на фиг.50. Как можно видеть на данной фигуре, выступ 1448 блокировки по отсутствию загрузки на тяге 1440 шарнирного поворота вводится в зацепление с фланцем 190' на цилиндре 178' чувствительного механизма так, что тяга 1440 шарнирного поворота поджимается вбок наружу в направлении «I». Как также можно видеть на данной фигуре, продолжающийся внутрь упорный фиксатор 37 сформирован на сегменте 36a корпуса рукоятки и выполнен с возможностью вмещения в фиксирующий вырез 1445 в тяге 1440 шарнирного поворота, когда фланец 190' входит в зацепление с выступом 1448 блокировки по отсутствию загрузки для поджима тяги 1440 шарнирного поворота в направлении «I». Когда фиксатор 37 вмещен в фиксирующий вырез 1445, тягу 1440 шарнирного поворота нельзя привести в действие. Следовательно, когда одноразовый загрузочный модуль не присоединен к инструменту 1410, рычаг 1422 шарнирного поворота нельзя привести в действие. Когда одноразовый загрузочный модуль присоединяют к удлиненному корпусу 14 и штоку 52 управления, и тяге 176 чувствительного механизма, цилиндр 178' чувствительного механизма поджимается в проксимальном направлении «PD», что приводит к расцеплению фланца 190' с выступом 1448 блокировки по отсутствию загрузки, как показано на фиг.51, и, тем самым, допускает перемещение тяги 1440 шарнирного поворота. Таким образом, рычаг 1422 шарнирного поворота можно приводить в действие, когда одноразовый загрузочный модуль присоединен к сшивающему скобками аппарату 1410.
Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что вышеописанный механизм 1420 шарнирного поворота позволяет врачу манипулировать инструментом одной рукой. Данное решение является значительным усовершенствованием по сравнению с механизмами шарнирного поворота, описанными в патенте США №5865361 и другими известными сшивающими скобками аппаратами, выполненными для работы с одноразовыми загрузочными модулями.
На фиг.52-64 показан другой хирургический сшивающий скобками аппарат 1510 в соответствии с настоящим изобретением, конструктивно предназначенный для применения с шарнирно-поворачиваемым одноразовым загрузочным модулем (не показанным), который позволяет врачу шарнирно поворачивать одноразовый загрузочный модуль и выполнять им прошивку/отрезание при манипулировании подвижной рукояткой 24''. В одном варианте осуществления хирургический сшивающий скобками аппарат 1510 может содержать узел 12 рукоятки, который содержит удлиненный корпус 14, который соединен с возможностью функционирования с узлом 12 рукоятки и дистально выступает из него. Дистальный конец удлиненного корпуса 14 может соединяться с шарнирно-поворачиваемым одноразовым загрузочным модулем 16. Одноразовый загрузочный модуль может содержать инструментальный узел 17, который допускает его селективный шарнирный поворот вокруг оси «A1-A1» шарнирного поворота шарнирно-поворотными движениями, передаваемыми в упомянутый узел посредством удлиненного корпуса 14 известным образом. Как подробно поясняется ниже, хирургический сшивающий скобками аппарат 1510 может применять оригинальное новое переключательное устройство 1512, которое сопрягается с подвижной рукояткой 24'', приводящим стержнем 46 и системой 1520 шарнирного поворота. Когда переключательное устройство 1512 ориентировано в положение «прошивки/отрезания», манипулирование подвижной рукояткой 24'' путем выполнения рабочих ходов сообщает прошивное/отрезное движение приводящему стержню 46, и когда переключательное устройство 1512 ориентировано в положение «шарнирного поворота», манипулирование подвижной рукояткой 24'' путем выполнения рабочих ходов приводит в действие систему 1520 шарнирного поворота. Компоненты, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления, обозначаются ниже идентичными позициями, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов.
Как можно видеть на фиг.52 и 53, переключательное устройство 1512 может содержать селекторный переключатель 1522 шарнирного поворота, который расположен снаружи корпуса 36 рукоятки для обеспечения доступа к нему. Селекторный переключатель 1522 шарнирного поворота может быть соединен с осью 1524 селекторного переключателя шарнирного поворота, которая продолжается сквозь сегмент 36b корпуса рукоятки и закреплена к качающейся опоре 1530, которая составляет участок системы 1520 шарнирного поворота. Вторая ось 1526 селекторного переключателя шарнирного поворота выступает наружу из другой стороны качающейся опоры 1530 и продолжается сквозь сегмент 36a корпуса рукоятки для соединения с селекторным переключателем 1522a так, что качающаяся опора 1530 может поворачиваться вокруг оси «RA» качания, определяемой осями 1524, 1526. Смотри фиг.60. Как можно видеть на фиг.56-58, система 1520 шарнирного поворота дополнительно содержит первое зубчатое колесо 1540 шарнирного поворота и второе зубчатое колесо 1550 шарнирного поворота, каждое из которых может свободно поворачиваться внутри качающейся опоры 1530. Первое и второе зубчатые колеса 1540 и 1550 шарнирного поворота ориентированы для селективного зацепления за надставку 1441' тяги шарнирного поворота, которая содержит участок тяги 1440' шарнирного поворота, которая в других отношения аналогична вышеописанной тяге 1440 шарнирного поворота. Как можно видеть на фиг.55, в надставке 1441' тяги шарнирного поворота содержится ряд отверстий 1443', выполненных с возможностью зацепления первым и вторым зубчатыми колесами 1540, 1550 шарнирного поворота, в зависимости от ориентации качающейся опоры 1530.
Переключательное устройство 1512 может дополнительно содержать оригинальный новый узел 1560 селективного переключения передач для сопряжения между зубчатым колесом 1610 прошивки/отрезания и зубчатой передачей 1600 шарнирного поворота, которая содержит участок системы шарнирного поворота. В различных вариантах осуществления зубчатая передача 1600 шарнирного поворота может содержать первое передаточное зубчатое колесо 1602, которое установлено на оси 1604 первого передаточного зубчатого колеса, которая установлена с возможностью вращения в гнезда-опоры (не показанные) в сегментах 36a, 36b рукоятки, и второе передаточное зубчатое колесо 1606, которое установлено на оси 1608 второго передаточного зубчатого колеса, которая установлена с возможностью вращения в гнезда-опоры (не показанные) в сегментах 36a, 36b рукоятки. В различных вариантах осуществления узел 1560 селективного переключения передач может содержать переключатель 1562 выбора функции, который содержит пару штифтов 1563, выступающих из него, которые продолжаются сквозь соответствующие дуговидные прорези 1564 в сегменте 36b корпуса рукоятки и закреплены к приводному диску 1566. Смотри фиг.61 и 62. Как можно видеть на данных фигурах, в приводном диске 1566 может содержаться ряд вмещающих зубья углублений 1568, которые выполнены с возможностью селективного зацепления с соответствующими зубьями 1571 диска в подвижном диске 1570. Подвижный диск 1570 может быть закреплен от поворота на неподвижной оси 1574. Как можно видеть на фиг.61 и 62, конец 1575 неподвижной оси 1574 может вмещаться в углубление 1577 и заштифтован в данном углублении стопорным штифтом 1578. Например, в различных вариантах осуществления конец 1575 может быть отформован в сегменте 36a корпуса рукоятки так, чтобы неподвижная ось 1574 не могла поворачиваться относительно упомянутого сегмента. Как также можно видеть на фиг.62, подвижный диск 1570 может быть заштифтован от поворота на неподвижной оси 1574 подвижным штифтом 1580, который продолжается сквозь поперечный паз 1576 в неподвижной оси 1574, чтобы подвижный диск 1570 перемещался аксиально (и без возможности поворота) на неподвижной оси 1574.
Как можно видеть на фиг.61 и 62, узел 1560 селективного переключения передач может дополнительно содержать узел 1590 зубчатого привода, который содержит участок 1592 зубчатого привода и участок 1594 зубчатого привода шарнирного поворота. Узел 1590 зубчатого привода выполнен с возможностью аксиального перемещения на неподвижной оси 1574 и поджат в направлении «J» пружиной 1596, которая надета на неподвижную ось 1574.
Ниже, со ссылками на фиг.57 и 58, приведено описание работы системы 1520 шарнирного поворота. Чтобы начать процесс шарнирного поворота, врач приводит в действие один из селекторных переключателей 1522a, 1522b шарнирного поворота. Например, в одном варианте осуществления, если врач намерен шарнирно повернуть одноразовый загрузочный модуль вправо, врач поворачивает селекторные переключатели 1522a, 1522b шарнирного поворота вниз (по стрелке «L» на фиг.52). При повороте селекторных переключателей 1522 вниз, качающаяся опора 1530 поворачивается в направлении против часовой стрелки «CCW» на фиг.58 для приведения второго зубчатого колеса 1550 шарнирного поворота в зубчатое зацепление с отверстиями 1443' в надставке 1441' тяги шарнирного поворота. В режиме шарнирного поворота узел 1560 селективного переключения передач может оставаться в незадействованном положении, показанном на фиг.59 и 63. В данном положении узел 1590 зубчатого привода расположен так, что зубчатое колесо 1620 рукоятки, закрепленное или, в ином случае, отформованное на подвижной рукоятке 24, находится в зубчатом зацеплении с участком 1592 зубчатого привода узла 1590 зубчатого привода. Кроме того, участок 1594 зубчатого привода шарнирного поворота узла 1590 зубчатого привода находится в зубчатом зацеплении с первым передаточным зубчатым колесом 1602. Как можно видеть на фиг.59, когда узел 1590 зубчатого привода расположен упомянутым образом, зубчатое колесо 1610 прошивки/отрезания, которое установлено с возможностью вращения на ось 1612 зубчатого колеса прошивки/отрезания, не находится в зацеплении с узлом 1590 зубчатого привода. Таким образом, приведение в действие подвижной рукоятки 24 не повлияет на зубчатое колесо 1610 прошивки/отрезания.
Когда селекторные переключатели 1522a, 1522b, 1562 находятся в положении в соответствии с непосредственно предшествующим описанием, врач может шарнирно повернуть одноразовый загрузочный модуль, присоединенный к сшивающему скобками аппарату 1510, приведением в действие (с применением храпового механизма или поворотом) подвижной рукоятки 24. Когда подвижную рукоятку 24 приводят в действие, зубчатое колесо 1620 рукоятки поворачивается в направлении против часовой стрелки «CCW» и, в свою очередь, вынуждает поворачиваться в направлении по часовой стрелке «CW» приводное зубчатое колесо 1592, которое, в свою очередь, вынуждает поворачиваться в направлении против часовой стрелки «CCW» первое передаточное зубчатое колесо 1602, которое, в свою очередь, вынуждает поворачиваться в направлении по часовой стрелке «CW» второе передаточное зубчатое колесо 1606, которое, в свою очередь, вынуждает поворачиваться в направлении против часовой стрелки «CCW» первое зубчатое колесо 1540 шарнирного поворота, которое, в свою очередь, вынуждает поворачиваться в направлении по часовой стрелке «CW» второе зубчатое колесо 1550 шарнирного поворота, которое, в свою очередь, перемещает надставку 1441' тяги шарнирного поворота в проксимальном направлении «PD». Смотри фиг.58. Когда надставка 1441' тяги шарнирного поворота приводится в движение в проксимальном направлении «PD», тяга 1440' шарнирного поворота приводит в движение в проксимальном направлении «PD» сдвигаемый элемент 138” и прикрепленное к нему передаточное звено 123 шарнирного поворота, которое, тем самым, может вынуждать одноразовый загрузочный модуль, связанный с данным звеном, шарнирно поворачиваться в направлении вправо таким образом, как изложено выше и поясняется в дальнейшем. Для шарнирного поворота одноразового загрузочного модуля влево, врач поворачивает селекторные переключатели 1522a, 1522b шарнирного поворота в направлении вверх (направление «M» на фиг.52). Когда селекторные переключатели 1522a, 1522b поворачивают в данном направлении, качающаяся опора 1530 поворачивается в направлении по часовой стрелке «CW» вокруг оси «RA» качания и, тем самым, приводит первое зубчатое колесо 1540 шарнирного поворота в зубчатое зацепление с надставкой 1441' тяги шарнирного поворота. Так как первое зубчатое колесо 1540 шарнирного поворота поворачивается в направлении по часовой стрелке «CW», первое зубчатое колесо 1540 шарнирного поворота приводит надставку 1441' тяги шарнирного поворота в движение в дистальном направлении «DD», когда приводят в действие подвижную рукоятку. Когда надставку 1441' тяги шарнирного поворота приводят в движение в дистальном направлении «DD», тяга 1440' шарнирного поворота приводит в движение в дистальном направлении «DD» сдвигаемый элемент 138'' и прикрепленное к нему передаточное звено 123 шарнирного поворота, которое, тем самым, может вынуждать одноразовый загрузочный модуль, связанный с данным звеном, шарнирно поворачиваться в направлении влево. Кроме того, в данном варианте осуществления тяга 1440' шарнирного поворота может использовать блокировочное устройство, описанное выше применительно к тяге 1440 шарнирного поворота, для предотвращения перемещения тяги 1440' шарнирного поворота, когда к сшивающему скобками аппарату 1510 не присоединен одноразовый загрузочный модуль. Таким образом, в данном варианте осуществления шарнирно-поворотные движения производят приведением в действие подвижной рукоятки 24.
Данный вариант осуществления может также использовать оригинальную новую систему прошивки/отрезания, обозначенную, в общем, позицией 1601, в состав которой входит зубчатое колесо 1610 прошивки/отрезания. В частности, и как показано на фиг.55-60, система 1601 прошивки/отрезания может также содержать ползун 1640 собачки, который установлен с возможностью перемещения в правой реечной направляющей 1630a, сформированной в правом сегменте 36a корпуса рукоятки, и левой реечной направляющей 1630b, сформированной в левом сегменте 36b корпуса рукоятки, как показано на фиг.54 (сегменты 36a, 36b корпуса не показаны для наглядности на фиг.54). В различных вариантах осуществления ползун 1640 собачки, в общем, может иметь форму заглавной буквы «I» с дистальным поперечным участком 1642, центральным пластинчатым участком 1644 и проксимальным поперечным участком 1646. Поперечные участки 1642, 1646 служат для установки ползуна 1640 собачки с возможностью сдвига в реечных направляющих 1630a, 1630b так, что ползун 1640 собачки может аксиально перемещаться в проксимальном направлении «PD» и дистальном направлении «DD». Кроме того, в данном варианте осуществления может присутствовать приводная рейка 1650, сформированная на нижней поверхности или иначе прикрепленная к нижней поверхности центрального пластинчатого участка 1644 ползуна 1640 собачки. Рейка 1650 прошивки/отрезания ориентирована для зубчатого зацепления с зубчатым колесом 1610 прошивки/отрезания, как дополнительно подробнее поясняется ниже. Кроме того, к центральному пластинчатому участку 1644 прикреплена собачка 42, которая содержит участок 43 зацепления с рейкой для приводного зацепления рейки 48 на приводящем стержне 46. Как показано на фиг.55 и 64, собачка 42 в различных вариантах осуществления может быть штампованной из металла и иметь, по существу, U-образную форму, так что собачку 42 можно установить с возможностью поворота на шарнирном пальце 44' на центральном пластинчатом участке 1644. Пружину 50' собачки можно установить в отверстие 1645 в центральном пластинчатом участке 1644 для поджима собачки 42 в зубчатое зацепление с рейкой 48 на приводящем стержне 46. Смотри фиг.64.
Ниже, со ссылкой на фиг.60 и 64, приведено описание работы системы 1601 прошивки/отрезания. Чтобы начать процесс прошивки/отрезания, врач поворачивает узел 1560 селективного переключения передач в положение, показанное на фиг.64, чтобы узел 1590 зубчатого привода был поджат в направлении «K» так, что зубчатое колесо 1620 рукоятки остается в зубчатом зацеплении с ведущим зубчатым колесом 1592, и зубчатое колесо 1594 шарнирного поворота в узле 1590 зубчатого привода не находится в зацеплении с первым передаточным зубчатым колесом 1602 шарнирного поворота. Кроме того, приводное зубчатое колесо 1592 находится в зубчатом зацеплении с зубчатым колесом 1610 прошивки/отрезания, которое, как описано выше, находится в зубчатом зацеплении с рейкой 1650 прошивки/отрезания. Так как ведущее зубчатое колесо 1594 шарнирного поворота не находится в зацеплении с первым передаточным зубчатым колесом 1602 шарнирного поворота, то приведение в действие подвижной рукоятки 24'' не создаст, в результате, никаких шарнирно-поворотных движений.
Когда селекторный переключатель 1562 устанавливают в соответствии с непосредственно предшествующим описанием, врач может привести в действие приводящий стержень 46, который, в свою очередь, передает прошивное/отрезное движения штоку 52 управления, соединенному с приводящим стержнем 46, который, в свою очередь, передает прошивное/отрезное движения одноразовому загрузочному модулю, соединенному со штоком таким образом, как описано в патенте США №5865361. Как показано на фиг.56, приводящий стержень 46 в соответствии с данным оригинальным новым вариантом осуществления приводят в действие (или перемещают в дистальном направлении «DD») путем приведения в действие (с применением храпового механизма или поворотом) подвижной рукоятки 24. Когда подвижную рукоятку 24 приводят в действие, зубчатое колесо 1620 рукоятки поворачивается в направлении против часовой стрелки «CCW» и, в свою очередь, вынуждает поворачиваться в направлении по часовой стрелке «CW» приводное зубчатое колесо 1592, которое, в свою очередь, вынуждает поворачиваться в направлении против часовой стрелки «CCW» зубчатое колесо 1610 прошивки/отрезания и приводить в движение рейку 1650 прошивки/отрезания и соединенную с ней собачку 42 в дистальном направлении «DD». Участок 43 зацепления с рейкой собачки 42 находится в зацеплении с зубьями 49 рейки 48 на приводящем стержне 46 и, тем самым, приводит в движение приводящий стержень 46 в дистальном направлении «DD». В других отношениях, данный вариант осуществления работает, как описано выше. В частности, врач продолжает приводить в действие подвижную рукоятку 24'' с помощью храпового механизма, пока не завершится последовательность прошивки/отрезания. Когда подвижную рукоятку 24'' поворачивают в положение около участка 22 неподвижной рукоятки, врач отпускает подвижную рукоятку 24'' и подвижная рукоятка 24'' поворачивается в исходное положение пружиной 40 (описанной выше), и затем подвижную рукоятку 24'' можно снова повернуть для выполнения другого хода по подаче собачки 42 и приводящего стержня 46. Когда подвижную рукоятку 24'' отпускают, зуб 43 зацепления рейки на собачке 42 сдвигается по зубьям 49 на зубчатой рейке 48 приводящего стержня в то время, как собачка перемещается в проксимальном направлении «PD», и затем повторно зацепляет зубья 49, когда подвижную рукоятку 24'' поворачивают для приведения приводящего стержня в движение в дистальном направлении «DD».
Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что сшивающий скобками аппарат 1510 оснащен подвижной рукояткой 24'', которую можно использовать для приведения в действие инструмента, а также для приведения в действие закрепленного на нем одноразового загрузочного модуля. Из дальнейшего будет понятно, что данные варианты осуществления способны развивать более высокие усилия шарнирного поворота, чем другие известные устройства, например, устройства, описанные в патенте США №5865361.
На фиг.65-69 изображен альтернативный механизм 1720 шарнирного поворота для аксиальной подачи сдвигаемого элемента 138, чтобы добиться, в конечном счете, продольного срабатывания передаточного звена шарнирного поворота (не показанного на фиг.65). Как можно видеть на фиг.65 и 66, механизм 1720 шарнирного поворота можно использовать в соединении с поворотной головкой 28', которая может быть, по существу, идентичной вышеописанной поворотной головке 28, за исключением того, что поворотная головка 28' выполнена с возможностью установки на ней головки 1730 шарнирного поворота, как показано. Как можно видеть на фиг.66, головка 1730 шарнирного поворота может содержать лапку 1732 для захвата пальцами, которая закреплена на шарнирном пальце 1734, который продолжается сквозь отверстие 1736 в сегменте 28a' поворотной головки. Шарнирный палец 1734 может содержать квадратный участок 1735, который выполнен с возможностью неповоротного размещения в соответствующем квадратном отверстии 1752 в кулачковом диске 1750. Сдвигаемый элемент 138 может содержать выступающий вверх консольный участок 540, в котором содержится вырез 542, который выполнен в размер для вмещения лапки (не показанной), сформированной на (непоказанном) цилиндре чувствительного механизма, как пояснялось выше. Дистальный конец сдвигаемого элемента 138 может содержать консоль 546, которая содержит отверстие 548, выполненное с возможностью вмещения пальца 164 (не показанного на фиг.65 и 66), продолжающегося из проксимального конца передаточного звена 123 шарнирного поворота (не показанного на фиг.65 и 66), как пояснялось выше. Смотри фиг.4 и 11. К сдвигаемому элементу 138 прикреплен штифт 166, который может быть изготовлен из неабразивного материала, например, тефлона® или металла, который покрыт Тефлоном®, и в размер для вмещения в дуговидную кулачковую прорезь 1754. Следовательно, когда головку 1730 шарнирного поворота поворачивают, штифт 166 приводится в продольное движение либо в проксимальном направлении «PD» или в дистальном направлении «DD», в зависимости от направления, в котором поворачивают головку 1730 шарнирного поворота. Продольное смещение штифта 166 показано на последовательности фиг.67-69. Например, на фиг.67 показано положение кулачкового диска 1750 и штифта 166, когда одноразовый загрузочный модуль шарнирно повернут влево. На фиг.68 показано положение кулачкового диска 17650 и штифта 166 шарнирного поворота, когда одноразовый загрузочный модуль не повернут (например, расположен соосно с удлиненным корпусом), и на фиг.69 показано положение кулачкового диска 17650 и штифта 166 шарнирного поворота, когда одноразовый загрузочный модуль шарнирно повернут вправо. В некоторых вариантах осуществления дуговидная кулачковая прорезь 1754 может иметь такую форму, что ее угол подъема относительно штифта 166 на протяжении всей последовательности приведения в действие является относительно малым (меньше 15 градусов), что может приводить к эффективной фиксации шарнирного поворота.
На фиг.70 и 71 изображен другой оригинальный новый механизм 1820 шарнирного поворота и оригинальная новая система 1850 поворота с фиксацией, которые можно применять в соединении с сшивающим скобками аппаратом 1810, в котором может применяться одноразовый загрузочный модуль. Механизм 1820 шарнирного поворота конструктивно предназначен для аксиальной подачи сдвигаемого элемента 138 для приведения, в конечном счете, в продольное движение передаточного звена 123 шарнирного поворота (не показанного на фиг.70 и 71), которое соединено со сдвигаемым элементом 138. Как можно видеть на фиг.70 и 71, механизм 1820 шарнирного поворота можно применять в связи с корпусом 36'' рукоятки, который сформирован из сегментов рукоятки (на фиг.70 и 71 показан сегмент 36a'' рукоятки, но следует понимать, что, для формирования корпуса 38'' рукоятки, применяется еще один сегмент рукоятки, сопрягающийся по форме с сегментом 36a'' рукоятки). В различных вариантах осуществления механизм 1820 шарнирного поворота установлен на поворотном кожухе 1830, который содержит снабженный фланцем проксимальный конец 1832, который выполнен с возможностью вмещения в кольцевую канавку 1834, сформированную в корпусе 36'' рукоятки таким образом, что поворотный кожух 1830 можно селективно поворачивать вокруг оси «L-L» относительно кожуха 36'' рукоятки, как дополнительно подробно поясняется ниже. Хотя на фиг.70 и 71 и не показано, удлиненный элемент 14 и обойма 124, описанные выше в связи с другими вариантами осуществления, можно закреплять к поворотному кожуху 1830 радиальными выступами 132, сформированными на дистальном конце поворотного кожуха 1830. Смотри фиг.70. Выступы 132 и отверстия 128 в обойме 124 жестко фиксируют поворотный кожух 1830 и удлиненный корпус 14 как от продольного, так и от поворотного перемещения друг относительно друга. Следовательно, поворот поворотного кожуха 1830 относительно корпуса 36'' рукоятки приводит к соответствующему повороту удлиненного корпуса 14 относительно корпуса 36'' рукоятки.
Как можно видеть на фиг.70 и 71, механизм 1820 может содержать кольцо 1822 шарнирного поворота, которое соединено на резьбе с группой резьбовых витков 1836, обеспеченных на поворотном кожухе 1830. Сдвигаемый элемент 138 может содержать выступающий вверх консольный участок 540, который содержит вырез 542, который сформирован в данном участке в размер для вмещения лапки (не показанной), сформированной на цилиндре чувствительного механизма (не показанном), как поясняется выше. Дистальный конец сдвигаемого элемента 138 может содержать консоль 546, которая содержит отверстие 548, выполненное с возможностью вмещения пальца 164 (не показанного на фиг.70 и 71), продолжающегося из проксимального конца передаточного звена 123 шарнирного поворота (не показанного на фиг.70 и 71), как поясняется выше. Смотри фиг.4 и 11. К сдвигаемому элементу 138 прикреплен штифт 166, который может быть изготовлен из неабразивного материала, например, Тефлона® или металла, который покрыт Тефлоном®, и в размер для вмещения в кольцевую прорезь 1825, сформированную в кольце 1822 шарнирного поворота. Следовательно, когда кольцо 1822 шарнирного поворота подается по резьбе на поворотном кожухе 1830 в проксимальном направлении «PD», штифт 166 также приводит в движение сдвигаемый элемент 138 (и передаточное звено 123 шарнирного поворота) в проксимальном направлении «PD», что вызывает шарнирный поворот одноразового загрузочного модуля в направлении вправо. Аналогично, когда кольцо 1822 шарнирного поворота подается по резьбе на поворотном кожухе 1830 в дистальном направлении «DD», штифт 166 также приводит в движение сдвигаемый элемент 138 (и передаточное звено 123 шарнирного поворота) в дистальном направлении «DD», что вызывает шарнирный поворот одноразового загрузочного модуля в направлении влево.
Вариант осуществления, показанный на фиг.70 и 71 содержит также оригинальную новую систему 1850 поворота с фиксацией, которая может содержать блокируемую головку 1852, которая состоит из двух сегментов 1852a головки, которые соединены между собой винтами, клеем, защелкивающимися элементами, стойками и т.п. над дистальным концом корпуса 36'' рукоятки так, что блокируемая головка 1852 установлена с возможностью поворота и аксиального сдвига на дистальном конце узла 36'' рукоятки. Как также можно видеть на фиг.70 и 71, дистальный конец корпуса 36'' рукоятки содержит первый стопорный фланец 1860 с первым набором сформированных на нем радиальных зубьев 1862 зубчатого колеса. Блокируемая головка 1852 может также содержать продолжающийся внутрь второй стопорный фланец 1854, который содержит второй набор сформированных на нем радиальных зубьев 1856 зубчатого колеса. Второй набор радиальных зубьев 1856 зубчатого колеса расположен напротив первого набора радиальных зубьев 1862 зубчатого колеса на первом стопорном фланце 1860 так, что вторые радиальные зубья 1856 зубчатого колеса могут селективно сцепляться с первыми радиальными зубьями 1862 зубчатого колеса. Чтобы поджимать блокируемую головку 1852 в дистальном направлении «DD» для приведения второго набора радиальных зубьев 1862 зубчатого колеса в зубчатое зацепление с первым набором радиальных зубьев 1862 зубчатого колеса, можно применить фиксирующую пружину 1870. Как также можно видеть на фиг.70 и 71, проксимальный конец 1831 поворотного кожуха 1830 содержит поворотный шлиц 1837, сформированный на нем с возможностью зацепления с продолжающимся внутрь зубчатым фланцем 1858, сформированным на дистальном конце блокируемой головки 1852. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что поворотный шлиц 1837 и зубчатый фланец 1858 служат для фиксации от поворота блокируемой головки 1852 к поворотному кожуху 1830, но с допуском аксиального перемещения блокируемой головки 1852 относительно поворотного кожуха 1830. Следовательно, для поворота поворотного кожуха 1830 (и удлиненного корпуса 14 и одноразового загрузочного модуля, прикрепленного к нему), врач отжимает блокируемую головку 1852 в проксимальном направлении «PD», чтобы отцепить второй набор радиальных зубьев 1856 зубчатого колеса от первого набора радиальных зубьев 1862 зубчатого колеса, что позволяет блокируемой головке 1852 поворачиваться вокруг продольной оси «L-L» относительно корпуса 36'' рукоятки. Когда блокируемую головку 1852 поворачивают, поворотный кожух 1830 также поворачивается вместе с блокируемой головкой 1852 благодаря зацеплению между зубчатым фланцем 1858 и поворотным шлицом 1837. После того, как врач повернет поворотный кожух 1830 в требуемое положение, врач освобождает блокируемую головку 1852. Когда блокируемую головку 1852 отпускают, пружина 1870 поджимает второй набор радиальных зубьев 1856 зубчатого колеса в зубчатое зацепление с первым набором радиальных зубьев 1862 зубчатого колеса для удерживания поворотного кожуха 1830 в данном положении. Следовательно, описанные оригинальные новые конструкции решают проблемы, связанные с поворотными головками и механизмами шарнирного поворота, применяемыми в прежних хирургических инструментах, которые применяются в связи с одноразовыми загрузочными модулями. В частности, после того, как одноразовый загрузочный модуль и удлиненный корпус вставлены в пациента, врач может поворачивать одноразовый загрузочный модуль вокруг продольной оси «L-L» относительно узла 12” рукоятки до требуемой ориентации и затем блокировать его в данном положении. Затем, врач может шарнирно повернуть одноразовый загрузочный модуль влево или вправо от продольной оси. В вариантах осуществления в соответствии с непосредственно предшествующим описанием, резьбовое зацепление между кольцом шарнирного поворота и поворотной головкой служит для фиксации одноразового загрузочного модуля в требуемом шарнирно повернутом положении. Как указано выше, в прежних хирургических инструментах, в которых применяется поворотная головка, которая содержит фиксируемую к ней головку шарнирного поворота, поворотная головка может перемещаться, когда врач приводит в действие рычаг шарнирного поворота, что затрудняет точное позиционирование одноразового загрузочного модуля.
На фиг.72 и 73 изображен другой оригинальный новый механизм 1920 шарнирного поворота, установленный внутри поворотной головки 28'' такого типа, конструкция и работа которого описаны выше. В данном варианте осуществления механизм 1920 шарнирного поворота может содержать внешнее кольцо 1922 шарнирного поворота, которое содержит упорный фланец 1924, сформированный на кольце с возможностью вмещения в кольцевую канавку 1930, сформированную в поворотной головке 28'', для посадки с возможностью поворота внешнего кольца 1922 шарнирного поворота в поворотную головку 28'' таким образом, что внешнее кольцо 1922 шарнирного поворота может свободно поворачиваться относительно поворотной головки 28'', не может аксиально перемещаться относительно упомянутой головки. В различных вариантах осуществления проксимальный конец 1923 внешнего кольца 1922 шарнирного поворота может содержать сформированные на нем радиальные зубья 1926 зубчатого колеса для зубчатого зацепления с цилиндрическим зубчатым колесом 1940, которое закреплено на головке 1942 шарнирного поворота. Как можно видеть на фиг.73, головка 1942 шарнирного поворота содержит закрепленную в ней ось 1944, которая вмещается с возможностью поворота в сквозное отверстие 1943 в поворотной головке 28'' и жестко соединена с цилиндрическим зубчатым колесом 1940 так, что поворот головки 1942 шарнирного поворота вызывает поворот цилиндрического зубчатого колеса 1940. Когда цилиндрическое зубчатое колесо 1940 поворачивается, внешнее кольцо 1922 шарнирного поворота также поворачивается вокруг продольной оси «L-L». Специалистам со средним уровнем компетентности в данной области техники будет понятно, что внешнее кольцо 1922 шарнирного поворота можно селективно поворачивать в направлениях по часовой стрелке «CW» или против часовой стрелки «CCW» вокруг продольной оси L-L, в зависимости от направления поворота головки 1942 шарнирного поворота.
Как также можно видеть на фиг.72, внешнее кольцо 1922 шарнирного поворота содержит сформированную в нем внутреннюю резьбу 1928 для резьбового зацепления с внутренним кольцом 1950 шарнирного поворота. В данном варианте осуществления сдвигаемый элемент содержит металлическое звено 1960, которое закреплено или заштифтовано к внутреннему кольцу 1950 шарнирного поворота штифтом 1952 или другими средствами крепления. Металлическое звено 1960 может перемещаться только аксиально в проксимальном направлении «PD» и дистальном направлении «DD», так как данное звено вмещается в аксиальную канавку 1962, сформированную в поворотной головке 28''. Дистальный конец металлического звена 1960 содержит отверстие 1964, выполненное с возможностью вмещения пальца 164, продолжающегося из проксимального конца передаточного звена 123 шарнирного поворота. Следовательно, поворот головки 1942 шарнирного поворота будет приводить к аксиальному перемещению передаточного звена 123 шарнирного поворота в проксимальном направлении «PD» или дистальном направлении «DD», в зависимости от направления поворота головки 1942 шарнирного поворота. Когда передаточное звено 123 шарнирного поворота подается в дистальном направлении «DD», одноразовый загрузочный модуль будет, в результате, шарнирно поворачиваться влево, и, передаточное звено шарнирного поворота оттягивается в проксимальном направлении «PD», одноразовый загрузочный модуль будет, в результате, шарнирно поворачиваться вправо, как поясняется выше. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что резьбовое зацепление между внутренним кольцом 1950 шарнирного поворота и внешним кольцом 1922 шарнирного поворота будет служить для удерживания передаточного звена шарнирного поворота (и, в конечном счете, одноразового загрузочного модуля) в требуемом положении шарнирного поворота, пока головку шарнирного поворота снова не поворачивают. Кроме того, следует понимать, что требуемый поворот головки можно задавать передаточным отношением зубчатой передачи и шагом резьбы.
На фиг.74 и 75 показан другой альтернативный механизм 1920' шарнирного поворота, в котором применяется внутреннее кольцо 1922' шарнирного поворота, которое идентично вышеописанному кольцу 1922 шарнирного поворота, за исключением того, что в кольце 1922' шарнирного поворота содержится кулачковый паз 1970 вместо внутренней резьбы 1928. Как можно видеть на фиг.74 и 75, металлическое звено 1960 содержит закрепленный на нем штифт 1966 шарнирного поворота, который движется в кулачковом пазу 1970 во внутреннем кольце 1922' шарнирного поворота. Следовательно, когда внутреннее кольцо 1922' шарнирного поворота поворачивают головкой 1942 шарнирного поворота, как пояснялось выше, кулачковый паз 1970 и вмещенный в него штифт 1966 шарнирного поворота приводят в движение металлическое звено 1960 в проксимальном направлении «PD» и дистальном направлении «DD», что приводит к аксиальному перемещению передаточного звена 123 шарнирного поворота в таких направлениях, о которых упоминалось выше.
При использовании ранее известных хирургических сшивающих скобками устройств, которые приспособлены для применения с одноразовыми загрузочными модулями, шток управления часто случайно выдвигается из конца обоймы удлиненного корпуса до присоединения одноразового загрузочного модуля. Когда такое случается, и к аппарату присоединяют одноразовый загрузочный модуль, загрузочный модуль невозможно привести в действие. Вместо этого врач должен сначала отвести шток управления перед присоединением загрузочного модуля. Данное состояние может породить путаницу и приводит к ненужным потерям времени во время операции. Кроме того, во время последовательности исполнения прошивки/отрезания, прошивная планка может оказаться защемленной и потребовать от врача отведения прошивной планки, что может быть иногда сложной задачей, в зависимости от характера защемления. Вариант осуществления хирургического сшивающего скобками аппарата 2010 в соответствии с настоящим изобретением предназначен для устранения данных проблем.
В частности, и как показано на фиг.76, хирургический сшивающий скобками аппарат 2010 может быть, по существу, конструктивно аналогичен различным вышеописанным инструментам, за исключением оригинальной новой отводящей системы 2020, которая подробно описана ниже. Компоненты, которые аналогичны компонентам, применяемым в вышеупомянутых вариантах осуществления, будут обозначены такими же цифровыми позициями, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, в которых поясняется конструкция и работа данных компонентов.
В одном варианте осуществления хирургический сшивающий скобками аппарат 2010 может содержать узел 2012 рукоятки, который содержит удлиненный корпус 14, который соединен с возможностью функционирования с узлом 2012 рукоятки и дистально выступает из него. Дистальный конец удлиненного корпуса 14 может соединяться с шарнирно-поворачиваемым одноразовым загрузочным модулем 16 (или нешарнирным одноразовым загрузочным модулем). Одноразовый загрузочный модуль 16 может содержать инструментальный узел 17, который допускает его селективный шарнирный поворот вокруг оси «A1-A1» шарнирного поворота шарнирно-поворотными движениями, передаваемыми известным образом в данный узел посредством удлиненного корпуса 14. Смотри фиг.76. В различных вариантах осуществления проксимальный конец удлиненного корпуса 14 присоединен к поворотной головке 28, которая соединена с корпусом 2036 рукоятки. Как можно видеть на фиг.76 и 77, корпус 2036 рукоятки может быть сформирован из правого сегмента 2036a корпуса и левого сегмента 2036b корпуса, которые соединены один с другим.
Как показано на фиг.76-78, правый сегмент 2036a корпуса может содержать съемную крышку 2040, которая присоединена к правому сегменту 2036a корпуса защелками, винтами, штифтовыми вставками или съемным фиксирующим столбиком, вставляемым в бобышку. Как дополнительно подробно описано ниже, в данном варианте осуществления применяется также расцепляющая планка 64 (фиг.81) вышеописанных типа и конструкции, которая содержит соединенный с ней соединительный стержень 60. Соединительный стержень 60 продолжается сквозь удлиненную прорезь 34b для отведения в левом сегменте 2036b корпуса (фиг.76), а также сквозь удлиненную прорезь 34a для отведения в съемной крышке 2040 (фиг.77) для закрепления на нем головок 32a, 32b отведения, как описано выше. Правый сегмент 2036a корпуса дополнительно содержит сформированную в нем прорезь 34a' для отведения, которая соответствует прорези для отведения 34a в съемной крышке 2040, когда съемная крышка 2040 закреплена на данном сегменте защелкивающимися элементами, адгезивом, винтами и т.п. В данном варианте осуществления правый элемент 2036a корпуса может содержать пару сформированных на нем, пространственно разнесенных удлиненных направляющих выступов 2050, которые служат для ограничения удлиненного прохода 2052 для отведения между ними. Кроме того, в различных вариантах осуществления на соединительный стержень 60 может быть посажен отводящий скользящий элемент 2060, который принуждается только к аксиальному перемещению в дистальном направлении «DD» и проксимальном направлении «PD» в пределах удлиненного прохода 2052 для отведения. Отводящая система 2020 может дополнительно содержать ползун 2070 тросика, перемещение которого ограничено только продольным перемещением в пределах прохода 2052 для отведения, как можно видеть на фиг.79 и 84-86. В проксимальном конце 2072 ползуна 2070 тросика может содержаться вырез 2074, чтобы проксимальный конец 2082 отводящего тросика 2080 можно было заштифтовать или иначе закрепить к данному ползуну. Дистальный конец 2084 отводящего тросика 2080 можно закреплять к проксимальному концу 2092 отводящей пружины 2090. Дистальный конец 2094 отводящей пружины 2090 можно закреплять к стойке 2096 для отводящей пружины, сформированной на правом сегменте 2036a корпуса. Смотри фиг.78 и 83-85. Отводящий тросик 2080 может быть надет на отводящий шкив 2100, который установлен с возможностью вращения на стойку 2102 шкива, сформированную на правом сегменте 2036a корпуса.
В различных вариантах осуществления отводящая система 2020 может быть выполнена с возможностью автоматического отведения, а при желании, ручного отведения штока 52 управления в конце последовательности прошивки/отрезания. Например, как можно видеть на фиг.83, ручка 2110 взведения может содержать выполненную в нем полость 2111 и крепиться к ползуну 2070 тросика вилкообразным креплением 2112 выступа и штифтом 2114, который вмещается в полость 2111. Как можно видеть на фиг.83, ручка 2110 взведения может дополнительно содержать внутренний торцевой участок 2116, который выполнен с возможностью примыкания к съемной крышке 2040, а также содержит затылованную область или выемку 2118, сформированную в нем. Пружина 2120 выступа, сформированная как показано на фиг.78 и 83, может быть установлена на штифте 2114 для поджима ручки 2110 взведения на штифте 2114 в направлении против часовой стрелки «CCW», как показано на фиг.83. Отводящая система 2020 может дополнительно содержать узел 2130 предохранительного фиксатора.
Узел 2130 предохранительного фиксатора может содержать стопорный элемент 2132, который шарнирно соединен со съемной крышкой 2040 штифтом 2134 фиксатора. Фиксирующая пружина 2140, выполненная как показано на фиг.82 и 83, может быть смонтирована на штифте фиксатора 2134 и прикреплена к крышке 2040 винтом 2142 или другим подходящим крепежным средством так, что фиксирующая пружина 2140 поджата в направлении против часовой стрелки «CCW» на фиг.83. Как можно дополнительно видеть на фиг.83, стопорный элемент 2132 выполнен так, что выступает сквозь окно 2044 в крышке 2040 и содержит вырезанный проксимальный конец 2136, выполненный с возможностью зацепления выреза 2046 в крышке 2040. Смотри фиг.83. Стопорный элемент 2132 может иметь дистальный конец 2138, который выполнен с возможностью фиксирующего зацепления выреза 2076 в проксимальном конце 2072 ползуна 2070 тросика.
Ниже приведено описание работы хирургического сшивающего скобками аппарата 2010 со ссылкой на фиг.84-88. На фиг.84 изображен хирургический сшивающий скобками аппарат 2010 в исходном положении «перед прошивкой/отрезанием», головка 32a отведения и ручка 2110 взведения (фиг.80) находятся в положении «перед прошивкой/отрезанием» на проксимальном конце корпуса 2036 рукоятки. Перед началом последовательности прошивки/отрезания, врач может продвинуть ручку 2110 взведения в дистальном направлении «DD» во взведенное положение, показанное на фиг.85. Как можно видеть на данной фигуре, когда ручка 2110 взведения находится во взведенном положении, отводящая пружина 2090 натянута и служит для аккумулирования в ней энергии отведения. После того, как ручка 2110 взведения передвинута во взведенное положение, врач может нажать кнопку 82 прошивки/отрезания (как пояснялось выше) и затем начать последовательность прошивки/отрезания посредством приведения в действие подвижной рукоятки 24 с использованием храпового механизма. Когда врач подает приводящий стержень 46 в дистальном направлении «DD» посредством приведения в действие подвижной рукоятки 24 с использованием храпового механизма, головки 32a, 32b отведения перемещаются в дистальном направлении вместе приводящим стержнем 46, пока не достигнут положения, показанного на фиг.86, которое находится перед концом прошивного/отрезного хода (т.е. шток 52 управления подан на расстояние, на которое он может продвинуться в дистальном направлении, чтобы обеспечить полное срабатывание одноразового загрузочного модуля). Если врач пожелает отвести вручную шток 52 управления до окончания прошивного/отрезного хода (в любой момент времени во время последовательности прошивки/отрезания), врач просто прижимает ручки 2110 взведения в направлении по часовой стрелке «CW», показанном на фиг.87, что вынуждает ручку 2110 взведения прижать стопорный элемент 2132 в направлении по часовой стрелке «CW'' для принудительного выведения, тем самым, дистального конца 2138 из фиксирующего выреза 2076 в ползуне 2070 тросика, чтобы, тем самым, дать возможность ползуну 2070 тросика переместиться в проксимальном направлении «PD» под действием усилия отводящей пружины 2090 и, тем самым, принудить отводящий скользящий элемент 2060 к перемещению в проксимальном направлении «PD». Так как стержень 60 отведения продолжается сквозь ползун 2060 отведения и прикреплен к планке 64 отведения, то стержень 60 отведения вынуждает планку 64 отведения отводить приводящий стержень 46 (и шток 52 управления) благодаря его закреплению к приводящему стержню 46.
Если врач не желает вручную приводить в действие отводящую систему 2020, врач может продолжать двигать подвижной рукояткой 24 с использованием храпового механизма, пока последовательность прошивки/отрезания не завершится. Когда приводящий стержень 46 подан дистально в его крайнее дистальное положение в конце последовательности прошивки/отрезания (фиг.88), ползун 2060 отведения поджимает стопорный элемент 2132 в положение, показанное на фиг.88 так, что дистальный конец 2138 выведен из фиксирующего зацепления выреза 2076 в ползуне 2070 тросика, что позволяет ползуну 2070 тросика перемещаться в крайнее проксимальное отведенное положение под действием усилия отводящей пружины 2090. Следовательно, когда головка 32a отведения достигает положение полного срабатывания, она заставляет отводящую систему 2020 автоматически отвести приводящий стержень 46 и шток 52 управления.
Специалистам со средним уровнем компетентности в данной области техники несложно понять, что данные варианты осуществления служат для решения проблемы неполного отведения штока 52 управления в положение, в котором к сшивающему скобками аппарату можно присоединить другой одноразовый загрузочный модуль. Кроме того, отводящая пружина служит для поддержки отведения штока управления врачом, если данное отведение потребуется во время последовательности прошивки/отрезания.
На фиг.89 изображен альтернативный одноразовый загрузочный модуль 2216, который содержит удлиненный корпусной участок 250', который может содержать верхнюю корпусную половину (не показанную) и нижнюю корпусную половину 252'. Дистальный конец корпуса 250' соединен с инструментальным узлом 17 (фиг.76) и может разъемно крепиться к удлиненному корпусу 14. Корпусные половины образуют канал 253' для вмещения в нем с возможностью сдвига узла 212 привода аксиальной подачи. Как дополнительно поясняется ниже, узел 212 привода подачи содержит удлиненную приводную поперечину 266, содержащую дистальный рабочий наконечник 268 и проксимальную секцию 270 сцепления. Приводная поперечина 266 может быть изготовлена из одного листа материала или, предпочтительно, из нескольких сложенных листов. Секция 270 сцепления может содержать пару пальцев 270a и 270b сцепления, которые могут быть выполнены в размер и по конфигурации для установочного сцепления с парой соответствующих фиксирующих пазов 272a, сформированных в элементе 272 привода. Элемент 272 привода может содержать проксимальное отверстие 274, выполненное с возможностью вмещения дистального конца штока 52 управления, когда проксимальный конец одноразового загрузочного модуля 2216 введен в сцепление с удлиненным корпусом 14 хирургического сшивающего скобками аппарата 10. В данном варианте осуществления в корпусе 250' установлен, по меньшей мере, один аккумулирующий энергию элемент 2220, а, предпочтительно, пара таких элементов, как показано. Аккумулирующие энергию элементы 2220 могут содержать пружины 2222 сжатия. Когда шток 52 управления подается аксиально в дистальном направлении «DD», элемент 272 привода и приводная поперечина 266 приводятся в движение в данном направлении со сжатием пружин 2222 (т.е. с накоплением в них энергии для отведения). После того, как последовательность прошивки/отрезания завершена, или если во время последовательности прошивки/отрезания возникает потребность в отведении приводной поперечины 266, сжатые пружины 2222 будут высвобождать накопленную энергию отведения и служить для поддержки процессов отведения посредством высвобождения аккумулированной в них энергии, чтобы поджимать приводную поперечину 266 и элемент 272 привода в проксимальном направлении «PD».
Ранее известные инструменты, например, инструменты, описанные в патенте США №5865361, обладают таким недостатком, как неспособность срабатывать в толстой ткани (например, в тканях с толщинами больше, чем 3,5 мм) из-за повышенных нагрузок, действующих на систему прошивки/отрезания. Упомянутые повышенные нагрузки могут, например, повышать вероятность того, что система прошивки/отрезания выйдет из строя, когда нож все еще находится в наковальне, и поэтому может потребоваться, чтобы концевой эффектор вырезали из ткани. Данный вид отказа отказ может иметь следствием тяжелые травмы пациента. Различные варианты осуществления настоящего изобретения относятся к усовершенствованным передаточным механизмам или узлам привода, которые конструктивно выполнены с возможностью выполнения функция отказоустойчивого «предохранителя» или устройства, которое предотвращало бы подачу приводящего стержня 46 (например, предотвращало бы передачу приводящих движений в одноразовый загрузочный модуль), когда нагрузка прошивки/отрезания, обусловленная толстой тканью, превышает предварительно заданную величину.
На фиг.90 показан один передаточный узел 100 привода, который содержит приводящую собачку 42', которая содержит участок 102 корпуса собачки, на котором имеется элемент или зуб 43 зацепления рейки, который закреплен или сформирован на участке 102 корпуса собачки в соединительной зоне, обозначенной, в общем, позицией 104. В варианте осуществления, показанном на фиг.90, поднутренная или ослабленная зона 45 сформирована вдоль, по меньшей мере, участка соединительной зоны 104. Характеристики поднутренной или ослабленной зоны 45 можно назначать так, чтобы зуб 43 срезался с приводящей собачки 42' или иначе приходил в неприводящее положение, когда нагрузка прошивки/отрезания достигает предварительно заданной максимальной величины, чтобы, тем самым, предотвращать подачу приводящего стержня 46, даже если приводимый от руки элемент 24 рукоятки продолжают приводить в действие. В различных вариантах осуществления предварительно заданную максимальную величину можно выбирать так, чтобы зуб 43 срезался или иначе приходил в неприводящее положение до того, как какие-либо компоненты поломались или иначе вышли из строя из-за сопротивления, испытываемого приводной поперечиной вследствие заедания или другого препятствия.
Другая конструкция собачки показана на фиг.91. Как можно видеть на данной фигуре, собачка 42'' содержит корпус 106 собачки шириной «W», и зуб 43 зацепления имеет ширину «W'», которая меньше, чем «W», так что зуб 43 зацепления будет срезаться или иначе отламываться, когда нагрузка прошивки/отрезания превышает предварительно заданную величину, для предотвращения дальнейшей подачи приводящего стержня 46, даже если приводимый от руки элемент 24 рукоятки продолжают приводить в действие. В различных вариантах осуществления собачки 42', 42'' можно изготавливать (формовать, механически обрабатывать и т.п.) из одного материала. В других вариантах осуществления зуб 43 зацепления можно формировать отдельно от корпуса 106 собачки и можно соединять с корпусом срезным штифтом (не показанным) или другим средством, например, клеем, чтобы закреплять зуб 43 зацепления в положении для приводящего зацепления с приводящим стержнем 46 при нормальных нагрузках, но срезаться для представления зубу 43 возможности повернуться в несцепленное положение, когда нагрузка прошивки/отрезания превосходит предварительно заданную величину.
На фиг.92 изображен другой передаточный узел 100' привода, который содержит приводящий стержень 46', который выполнен с возможностью поломки, когда нагрузка прошивки/отрезания превосходит предварительно заданную величину. В данном варианте осуществления поднутренная зона 108 обеспечена между соседними зубьями 49 и выполнена в размер для формирования зоны срезания длиной «SL», которая будет облегчать срезание зуба 49 или иначе допускать выход зуба 49 из приводящего зацепления с зубом 43, или позволять зубу 43 на собачке 42 перескакивать через зуб 49 на рейке 48', когда нагрузка прошивки/отрезания достигает вышеупомянутой предварительно заданной величины или превышает ее. В альтернативном варианте осуществления, показанном на фиг.93, приводящий стержень 46'' имеет ширину «WB», и каждый зуб 49 имеет ширину «WT», который может быть меньше, чем ширина «WB». Ширину «WT» можно назначать так, чтобы зубья 49 могли срезаться с приводящего стержня 46'' или иначе разрушаться или выходить из приводящего зацепления с зубом 43 на собачке 42, когда нагрузка прошивки/отрезания достигает вышеупомянутой предварительно заданной величины или превышает ее, как описано выше. Кроме того, передаточный узел может быть выполнен в размер для деформирования или прогибания под соответствующей нагрузкой, чтобы расцеплять зубья с собачкой при предварительно заданной нагрузке. Зубья на собачке и рейке в различных вариантах осуществления могут быть рассчитаны на минимальные разрушающие нагрузки, изменяющиеся в очень широком диапазоне, в зависимости от требуемой степени безопасности. Упомянутые минимальные разрушающие нагрузки можно получать изменением геометрии, конструкции и/или материалов, из которых изготавливают зубья, клей, срезные штифты и т.п.
Специалистам со средним уровнем компетентности в данной области техники будет понятно, что вышеописанные конструкции передаточных узлов привода в соответствии с настоящим изобретением представляют значительное усовершенствование по сравнению с ранее известными хирургическими инструментами, которые предназначены для приведения в действие одноразовых загрузочных модулей. В частности, данные передаточные узлы привода в соответствии с настоящим изобретением не допустят, чтобы врач подавал отрезные и сшивающие компоненты в загрузочном модуле, когда загрузочный модуль сталкивается с прошивными/отрезными усилиями, которые могут привести к защемлению и/или срыву полной подачи отрезных и сшивающих компонентов сквозь ткань, зажатую в модуле. При использовании ранее известных модулей, врач мог не подозревать, что толщина ткани, зажатой в модуле, была слишком большой для выполнения операции, и невольно мог продолжать подачу отрезных и сшивающих компонентов в модуль приведением в действие рукоятки, пока узел рукоятки не разрывался или не выходил из строя иначе, с лишением способности к отведению ножа. Если компоненты застревали, врач мог быть лишен возможности отвести компоненты и поэтому должен был вырезать модуль из ткани. Различные вышеописанные конструкции в соответствии с настоящим изобретением направлены на устранение упомянутых проблем.
Упомянутые оригинальные новые признаки можно также эффективно применить с другими хирургическими отрезными и сшивающими скобками аппаратами, в которых применяется конструкция приводящей собачки. Например, на фиг.93A и 93B показана конструкция 2000 собачки из двух частей, которую можно эффективно использовать с хирургическими инструментами, описанными в заявке на патент США №11/821 277, Surgical Stapling Instruments, изобретателей Чэд П. Бодри и Джеффри С. Свейзи (Chad P. Boudreaux and Jeffrey S. Swayze), поданной 22 июня 2007 г., описание которой целиком включено в настоящую заявку путем отсылки. В частности, узел 2000 собачки из двух частей может содержать корпус 2010 собачки, который может быть выполнен и, в других отношениях, действовать так, как описано в вышеупомянутой патентной заявке за исключением того, что в данном варианте осуществления участок 2020 зуба соединен с возможностью поворота или иного перемещения с корпусом 2010 собачки. Участок 2020 зуба в нормальном состоянии может поддерживаться в приводящей ориентации (фиг.93A) срезным штифтом 2030 или другой подходящей конструкцией, например, клеевой и т.п., которая выбрана для срезания или иного разрушения, когда прошивной/отрезной элемент 2040 наталкивается на нагрузку или сопротивление прошивки/отрезания предварительно заданной величины. На фиг.93A показан зуб 2020 в приводящем зацеплении с прошивным/отрезным элементом 2040. На фиг.93B показано положение после того, как прошивной/отрезной элемент 2040 натолкнулся на сопротивление, которое превосходит предварительно заданную нагрузку прошивки/отрезания, что, тем самым, вызвало срезание срезного штифта 2030 и позволило зубу 2020 повернуться в несцепленное положение. Следовательно, в несцепленном положении прошивной/отрезной элемент 2040 невозможно подать в дистальном направлении, даже если продолжается приведение в действие прошивного/отрезного рычага.
На фиг.94-97 показан оригинальный новый шарнирно-поворачиваемый одноразовый загрузочный модуль 3016, который можно применить с хирургическим сшивающим скобками аппаратом 10 или любыми другими различными хирургическими сшивающими скобками аппаратами, описанными выше. Как показано на фиг.96, одноразовый загрузочный модуль 3016 может содержать инструментальный узел 17, который содержит узел 20 наковальни и кассетный узел 18. Узел 20 наковальни может содержать участок 204 наковальни, который может содержать множество скобкоформирующих выемок (не показанных), сформированных в нижней поверхности упомянутого участка. К верней поверхности участка 204 наковальни можно крепиться покрывная планка 208 для образования между ними полости. Полость может иметь размер для вмещения дистального конца узла 212 привода аксиальной подачи. Продольная прорезь 214 продолжается вдоль участка 204 наковальни, чтобы способствовать проходу удерживающего выступа 284 узла 212 привода аксиальной подачи в полость наковальни. Кулачковая поверхность 209, сформированная на участке 204 наковальни может располагаться так, чтобы входить в зацепление с узлом 212 привода аксиальной подачи для облегчения зажима ткани между узлом 20 наковальни и кассетой 18. Пара шарнирных элементов 211, сформированных на участке 204 наковальни, может находиться внутри прорезей 213, сформированных в держателе 216 для направления движения участка 204 наковальни между разомкнутым и замкнутым положениями.
В различных вариантах осуществления кассетный узел 18 может содержать держатель 216, который образует удлиненный опорный желоб 218. Смотри фиг.96. Удлиненный опорный желоб 218 может иметь размер и конфигурацию для вмещения кассеты 220 для скобок. Соответствующие лапки 222 и прорези 224, сформированные вдоль кассеты 220 для скобок и удлиненного опорного желоба 218, могут выполнять функцию удерживания кассеты 220 для скобок внутри опорного желоба 218. На кассете 220 для скобок может быть выполнена пара опорных распорок, чтобы они располагались с опорой на боковые стенки держателя 216 для дополнительной устойчивости кассеты 220 для скобок в опорном желобе 218.
Кассета 220 для скобок может дополнительно содержать фиксирующие пазы 225 для вмещения множества скреп и толкателей известным образом. Множество пространственно разнесенных продольных пазов 230 продолжается сквозь кассету 220 для скобок для вмещения выступающих вверх кулачковых клиньев 232 приводящего блока 234. Центральный продольный паз 282 продолжается по длине кассеты 220 для скобок для облегчения прохождения ножевого лезвия 280. Во время работы хирургического аппарата 10 для наложения скобок, приводящий блок 234 поступательно движется по продольным пазам 230 кассеты 220 для скобок, чтобы подавать кулачковые клинья 232 последовательно в контакт с толкателями, установленными для выполнения их функции в пазы 225, и чтобы, тем самым вынуждать толкатели (не показанные) к поступательному движению в вертикальном направлении в пазах 225 и выталкиванию скреп, соответствующих толкателям (не показанным), из пазов 225 в деформирующие скрепы выемки узла 20 наковальни.
Различные варианты осуществления могут содержать опорный узел 202, который может содержать верхний и нижний опорные участки 236 и 238. В одном варианте осуществления верхний опорный участок 236 может быть снабжен парой осей 237 качания, которые выполнены для вмещения с возможностью поворота в отверстия 219 в боковых стенках держателя 216. Пара пружин 241, препятствующих продольному изгибу, может быть установлена в соответствующие выемки в опорном узле 202 для обеспечения опоры для многослойного ножевого узла внутри опорного узла 202. Проксимальный участок опорного узла 202 можно устанавливать с исключением возможности поворота в дистальную переходную муфту 243 корпуса, как показано на фиг.96.
Корпусной участок 200 одноразового загрузочного модуля 3016 может содержать верхнюю корпусную половину 250 и нижнюю корпусную половину 252. Проксимальный конец корпусной половины 250 может содержать выступы 254 сцепления для разъемного сцепления с удлиненным корпусом 14 (фиг.94) и вставной наконечник 193. Выступы 254 формируют байонетное сочленение с дистальным концом корпуса 14, описанное в патенте США № 5865361.
Как также можно видеть на фиг.96, узел 212 привода аксиальной подачи может содержать удлиненную приводную поперечину 266, содержащую дистальный рабочий наконечник 268 и проксимальную секцию 270 сцепления. Приводная поперечина 266 может быть изготовлена из одного листа материала или, предпочтительно, из нескольких сложенных листов. Секция 270 сцепления может содержать пару пальцев 270a и 270b сцепления, которые могут быть выполнены в размер и по конфигурации для установочного сцепления с парой соответствующих фиксирующих пазов 272a, сформированных в элементе 272 привода. Элемент 272 привода может содержать проксимальное отверстие (не показанное), выполненное с возможностью вмещения дистального конца 276 штока 52 управления (описанного выше), когда проксимальный конец одноразового загрузочного модуля 3016 введен в сцепление с удлиненным корпусом 14 хирургического сшивающего скобками аппарата 10.
Дистальный конец приводной поперечины 266 может быть образован вертикальной опорной распоркой 278, которая служит опорой для ножевого лезвия 280, и поверхностью 283 примыкания, которая входит в зацепление с центральным участком приводящего блока 234 во время операции сшивания скобками. Поверхность 285 при основании поверхности 283 может быть выполнена с возможностью вмещения опорного элемента 287, расположенного с возможностью скольжения вдоль дна держателя 216. Ножевое лезвие 280 может располагаться так, чтобы поступательно двигаться немного сзади приводящего блока 234 по центральному продольному пазу 282 в кассете 220 для скобок и, при этом, формировать разрез между рядами сшитой скобками ткани тела. Чтобы обеспечивать опору для приводной поперечины 266 в корпусе 200 в то время, как приводная поперечина 266 подается в аксиальном направлении, внутри корпуса 200 можно установить элемент 290 стабилизации ножа.
Удерживающий выступ 284 может выступать в дистальном направлении от вертикальной распорки 278 и может служить опорой для пары цилиндрических кулачковых роликов 286 на его дистальном конце. Кулачковые ролики 286 могут содержать запрессованные или приваренные штифты и могут быть выполнены в размер и по конфигурации с возможностью зацепления с кулачковой поверхностью 209 на корпусе 204 наковальни для прижима участка 204 наковальни к ткани тела. Между проксимальным концом участка 204 наковальни и верхним опорным участком 236 может быть обеспечена пара пружин 207 для поджима узла 20 наковальни в нормально разомкнутое положение.
В загрузочном модуле 3016, показанном на фиг.94-97, применяется «пассивная» конструкция шарнирного поворота. Как можно видеть на данных фигурах, загрузочный модуль 3016 содержит гибкий шарнирно-поворотный элемент 300, который соединен с корпусным узлом 200, например, проксимальной присоединительной корпусной втулкой 301. Гибкий шарнирно-поворотный элемент 300 содержит участок 301 корпуса, который может быть изготовлен, например, из полиэтилена, полипропилена или других подходящих материалов и может содержать множество разрезов 302, разделенных ребрами 304. В различных вариантах осуществления разрезы 302 и ребра 304 могут располагаться с равными промежутками вдоль гибкого шарнирно-поворотного элемента 300, что способствует формированию непрерывного радиуса изгиба, когда гибкий шарнирно-поворотный элемент поворачивают. Гибкий шарнирно-поворотный элемент 300, имеющий несколько радиусов изгиба можно получить обеспечением неравных промежутков между разрезами 302 и ребрами 304. Например, данную конструкцию можно обеспечить сокращением промежутка между ребрами 304 на одном конце и увеличением промежутка на другом конце. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что увеличение промежутков между разрезами 302 и/или ребрами 304 уменьшает радиус изгиба секции с увеличенными промежутками и, тем самым, точнее аппроксимирует соединение с изгибом в точке поворота. Напротив, уменьшение промежутков между разрезами 302 и/или ребрами приводит к более плавному изгибу, с большим радиусом изгиба. В альтернативном варианте гибкий шарнирно-поворотный элемент 300 можно изготовить из комбинации материалов, внешней частью которой может быть снабженная прорезями нержавеющая сталь, которая будет действовать аналогично вышеупомянутым пластикам и полимерным материалам.
В варианте осуществления, показанном на фиг.94-97, разрезы 302 содержат кольцевые канавки, которые продолжаются, по меньшей мере, частично по периметру гибкого шарнирно-поворотного элемента 300. Однако, разрезы 302 предпочтительно содержат полукольцевые канавки, которые разделены центральной продольной основой 306, проходящей вдоль продольной оси L-L гибкого шарнирно-поворотного элемента 300 так, что первое множество ребер сформировано на одной боковой стороне основы 306, и второе множество ребер сформировано на другой боковой стороне основы 306. Данная основа 306 помогает обеспечить жесткость гибкого шарнирно-поворотного элемента 300 и оставляет место сквозному пазу 310 для вмещения хирургических инструментов, например, узла 212 привода. Продольная основа 306 может проходить вдоль всей продольной протяженности гибкого шарнирно-поворотного элемента 300. Гибкий шарнирно-поворотный элемент 300 может также содержать пару боковых пазов 314, проходящих сквозь каждое ребро 304 с каждой боковой стороны, для вмещения соответствующей шарнирно-поворотной планки 320. Смотри фиг.96. Упомянутые шарнирно-поворотные планки 320 можно изготавливать из материала, который является относительно неупругим. То есть, планки 320 можно изготавливать из материала, который сохраняет свое положение после изгиба. Шарнирно-поворотные планки 320 можно изготавливать из таких материалов, как, например, свинец, медь, нержавеющая сталь, титан и т.п.
Одноразовый загрузочный модуль 3016 выполнен в размер для введения, в шарнирно неповернутом состоянии, показанном на фиг.94 и 95, по проходу канюли троакара, в хирургическое поле внутри пациента (не показанного) для выполнения хирургической операции. Например, одноразовый загрузочный модуль 3016 может быть выполнен в размер для введения через гастроскоп или колоноскоп. После того, как участок инструментального узла 17 одноразового загрузочного модуля 3016 введен по проходу канюли троакара, врач может переместить инструментальный узел 17 для получения требуемой ориентации шарнирного поворота «пассивным» приведением инструментального узла 17 в контакт с органом или другим участком тела или другим медицинским инструментом 330 (например, захватами, как показано на фиг.97), чтобы приложить внешнее усилие к инструментальному узлу 17 для принуждения его к шарнирному повороту в плоскости относительно корпусного участка 200 одноразового загрузочного модуля 3016. Специалисту со средним уровнем компетентности в данной области техники должно быть очевидно, что, после того, как инструментальный узел 17 шарнирно повернут в требуемое положение, шарнирно-поворотные планки 320 служат для удерживания инструментального узла 17 в данной конфигурации. Инструментальный узел 17 можно шарнирно повернуть на угол «PA», как показано на фиг.97.
На фиг.98-101 показан другой вариант осуществления загрузочного модуля 3016' в соответствии с настоящим изобретением. Загрузочный модуль 3016', по существу, идентичен загрузочному модулю 16, за исключением того, что загрузочный модуль 3016' выполнен с возможностью пассивного шарнирного поворота, а также активного шарнирного поворота. Как можно видеть на фиг.98 и 99, загрузочный модуль 3016' содержит первое шарнирно-поворотное сочленение 340, которое сформировано из опорного узла 202', который содержит дистальный участок 206 и проксимальный участок 226, который шарнирно соединен с дистальным участком. В различных вариантах осуществления дистальный участок 206 содержит верхний опорный участок 208 и нижний опорный участок 210. На каждом из опорных участков 206', 208' может быть сформирован шарнирный палец 244, чтобы задать ось «A1», которая может быть, по существу, перпендикулярной продольной оси «L-L» одноразового загрузочного модуля 3016'. Проксимальный участок 226 опорного узла 202' может содержать верхний опорный участок 236' и нижний опорный участок 238'. Дистальный участок 206 опорного элемента 202' и проксимальный участок 226 опорного элемента 202' могут шарнирно соединяться между собой парой соединительных элементов 246. Каждый соединительный элемент 246 содержит проходящее сквозь него отверстие 247 для вмещения в него соответствующего пальца 244. Проксимальный конец 248 каждого соединительного элемента 246 выполнен для вмещения с возможностью сцепления в соответствующую канавку 251, сформированную в верхнем опорном участке 236' и нижнем опорном участке 238'. Проксимальный участок 226 опорного узла 202' можно устанавливать с исключением возможности поворота в дистальную переходную муфту 243 корпуса, как показано на фиг.99. Корпусной участок 200 одноразового загрузочного модуля 3016' может содержать верхнюю корпусную половину 250 и нижнюю корпусную половину 252. Проксимальный конец корпусной половины 250 может содержать выступы 254 сцепления для разъемного сцепления с удлиненным корпусом 14 (не показанном на фиг.99) и вставной наконечник 193. Выступы 254 формируют байонетное сочленение с дистальным концом корпуса 14, которое дополнительно подробно описано ниже. Корпусные половины 250 и 252 образуют канал 253 для вмещения в нем с возможностью сдвига узла 212 привода аксиальной подачи. Между проксимальным концом участка 204 наковальни и верхним опорным участком может быть обеспечена пара пружин 207 для поджима узла 20 наковальни в нормально разомкнутое положение.
В данном варианте осуществления может также применяться гибкий шарнирно-поворотный элемент 300', который может быть, по существу, аналогичным вышеописанному гибкому шарнирно-поворотному элементу 300, за исключением нижеотмеченных отличий. Дистальный конец гибкого шарнирно-поворотного элемента 300' можно закреплять с исключением возможности поворота к дистальной переходной муфте 243 корпуса, и проксимальный конец гибкого шарнирно-поворотного элемента 300' можно закреплять с исключением возможности поворота к проксимальной присоединительной корпусной втулке 301, которая присоединена к корпусному участку 200. В данном варианте осуществления можно применять передаточное звено 256' шарнирного поворота, чтобы предоставлять также пользователю возможность активно шарнирно поворачивать инструментальный узел 17. Передаточное звено 256' шарнирного поворота может содержать удлиненный гибкий проволочный участок 450, который заканчивается дистальным крючковым участком 452. Проволочный участок 450 может вмещаться в просвет 420 в гибком шарнирно-поворотном элементе 300'. Крючковой конец 452 может быть закреплен между дистальным участком 206 и нижним опорным участком 210 штифтом, закрепленным между ними. Смотри фиг.99. Гибкий проволочный участок 450 может быть соединен с участком 451 штока, который содержит петлевой или другой крючковой участок 258', который выполнен для зацепления крючком с дистальным крючком 165, сформированным на дистальном конце первого передаточного звена 123 шарнирного поворота известным способом, описанным в патенте США №5,865,361. Смотри фиг.10. Загрузочный модуль 3016' данной конструкции допускает пассивный шарнирный поворот с помощью гибкого шарнирно-поворотного элемента 300' на угол «PA» описанным выше способом в диапазоне перемещений «PA» или, по желанию, врач может активно шарнирно поворачивать инструментальный узел 17 модуля вокруг первой оси «A1-A1» шарнирного поворота в диапазоне перемещений «AA» посредством приведения в действие рычага 30 шарнирного поворота так, как описано в патенте США №5865361. Смотри фиг.101.
На фиг.102-104 показан другой вариант осуществления загрузочного модуля 3016'' в соответствии с настоящим изобретением. Загрузочный модуль 3016'' может быть, по существу, идентичным загрузочному модулю 3016', за исключением того, что загрузочный модуль 3016'' конструктивно выполнен с двумя активными передаточными звеньями 256R, 256L шарнирного поворота, которые позволяют активно натягивать шарнирно-поворотный элемент 300 с одной стороны, при одновременном активном отталкивании с противоположной стороны. Как можно видеть на фиг.103 передаточные звенья 256R, 256L шарнирного поворота могут иметь дистальный пластинчатый участок 430, который выполнен в размер для продолжения через соответствующий боковой паз 314 в шарнирно-поворотном элементе 300. На дистальном конце каждого дистального пластинчатого участка 430 может быть выполнен упорный крепежный конструктивный элемент 432 для удерживания дистального пластинчатого участка 430 внутри соответствующего ему бокового паза 314. В альтернативных вариантах осуществления упорный конструктивный элемент может быть отформован в шарнирно-поворотном элементе 300, или можно применить другие крепежные конструкции. Передаточные звенья 256R, 256L шарнирного поворота могут дополнительно иметь удлиненный промежуточный участок 334R, 334L, который заканчивается крючковым участком 336R, 336L, соответственно. В различных вариантах осуществления передаточные звенья 256R, 256L шарнирного поворота могут быть изготовлены из металла или набора многослойных или наборных пластин.
На фиг.104 показан узел 125' штока управления, который может быть, по существу, аналогичен узлу 125 штока управления, описанному выше, за исключением того, что узел 125' штока управления содержит правое передаточное звено 123R шарнирного поворота и левое передаточное звено 123L шарнирного поворота. Правое передаточное звено 123R шарнирного поворота может содержать сформированный на нем дистальный крючок 165R для разъемного сцепления с крючковым участком 336R передаточного звена 256R шарнирного поворота в одноразовом загрузочном модуле 3016''. Смотри фиг.103. Аналогично, левое передаточное звено 123L шарнирного поворота может содержать сформированный на нем дистальный крючковой участок 165L для разъемного сцепления с крючковым участком 336L передаточного звена 256L шарнирного поворота в одноразовом загрузочном модуле 3016''. Правое передаточное звено 123R шарнирного поворота может содержать палец 164R, выступающий из его проксимального конца, и левое передаточное звено 123L шарнирного поворота может содержать палец 164L, выступающий из его проксимального конца. Хотя на фиг.103 специально не показано, однако, можно применять рычажную связь, зубчатую связь и т.п., чтобы соединять с возможностью перемещения пальцы 164R, 164L с консолью 160, соединенной со сдвигаемым элементом 138' таким образом, что, когда сдвигаемый элемент 138' аксиально подается в дистальном направлении «DD», как подробно описано выше, правые передаточные звенья 123R и 256R шарнирного поворота подаются в дистальном направлении «DD», и левые передаточные звенья 123L и 256L оттягиваются в проксимальном направлении «PD», чтобы, тем самым, вынуждать инструментальный узел 17 поворачиваться вокруг первой оси «A1-A1» поворота вправо от продольной оси L-L, как показано на фиг.101 или наоборот. Аналогично, в различных вариантах осуществления, когда сдвигаемый элемент 138' подается в проксимальном направлении «PD», правые передаточные звенья 123R и 256R шарнирного поворота оттягиваются в проксимальном направлении «PD», и левые передаточные звенья 123L и 256L подаются в дистальном направлении «DD», чтобы, тем самым, вынуждать инструментальный узел 17 поворачиваться влево от продольной оси L-L или наоборот. Специалисты со средним уровнем компетентности в данной области техники должны понимать, что подобное «нажимное» и «вытяжное»» действие приводит к снижению напряжений, действующих на одно передаточное звено шарнирного поворота, по сравнению с такими ранее известными шарнирно-поворотными конструкциями, в которых применяется единственное передаточное звено шарнирного поворота. Гибкий шарнирно-поворотный элемент 300' может нуждаться в большем усилии для сгибания или деформации по сравнению с конструкцией на основе шарнирного пальца, подобной конструкции участка 206.
На фиг.105-107 показан другой вариант осуществления загрузочного модуля 3016''' в соответствии с настоящим изобретением. Загрузочный модуль 3016''' представляет собой, по существу, комбинацию загрузочных модулей 3016 и 3016', так как в загрузочном модуле 3016''' применяется передаточное звено 256' шарнирного поворота и передаточные звенья 256R, 256L шарнирного поворота, которые позволяют шарнирно поворачивать шарнирно-поворотный элемент 300' в пассивном режиме в диапазоне перемещений «PA» и в активном режиме в дополнительном диапазоне перемещений «AA».
На фиг.108-111 показан другой хирургический сшивающий скобками аппарат 4010 в соответствии с настоящим изобретением, который конструктивно предназначен для применения с одноразовым загрузочным модулем. На фиг.108 показан одноразовый загрузочный модуль 16, который первое шарнирно-поворотное сочленение 340, тип и конструкция которого описаны выше, и которое позволяет инструментальному узлу 17 поворачиваться вокруг первой оси A1-A1 поворота относительно корпуса 200 одноразового загрузочного модуля, который прикреплен хирургическому сшивающему скобками аппарату 4010. Хирургический сшивающий скобками аппарат 4010 может обладать особенностями и компонентами, которые, по существу, аналогичны особенностям и компонентам различных вышеописанных вариантов осуществления хирургических сшивающих скобками аппаратов, за исключением оригинальной новой системы 4012 шарнирного поворота, различные конфигурации которой подробно описаны ниже. Компоненты, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления хирургического сшивающего скобками аппарата, обозначаются ниже идентичными позициями, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов. Как можно видеть на фиг.108, система 4012 шарнирного поворота может содержать промежуточное шарнирно-поворотное сочленение 4020, которое находится в узле 4014 удлиненного корпуса между одноразовым загрузочным модулем 16 и узлом 12 рукоятки, так что одноразовый загрузочный модуль 16 можно селективно поворачивать относительно узла 12 рукоятки вокруг второй оси A2-A2 шарнирного поворота. Как показано на фиг.108, вторая ось A2-A2 шарнирного поворота, по существу, поперечна продольной оси L-L и первой оси A1-A1 шарнирного поворота.
Как можно видеть на фиг.108 и 109, узел 4014 удлиненного корпуса может содержать дистальный сегмент 4030 корпуса и проксимальный сегмент 4040 корпуса, которые соединены между собой в промежуточном шарнирно-поворотном сочленении 4020. Система 4012 шарнирного поворота может дополнительно содержать сдвигаемый элемент 138, который содержит выступающий вверх консольный участок 540, который содержит вырез 542, который сформирован в данном участке в размер для вмещения лапки 544, сформированной на цилиндре 178 чувствительного механизма. Дистальный конец сдвигаемого элемента 138 может содержать консоль 546, которая содержит отверстие 548, выполненное с возможностью вмещения пальца 164, продолжающегося из проксимального конца передаточного звена 4050 шарнирного поворота. К сдвигаемому элементу 138 прикреплен штифт 166, который может быть изготовлен из неабразивного материала, например, Тефлона® или металла, покрытого Тефлоном®, и в размер для вмещения в ступенчатую кулачковую поверхность 148 (показанную на фиг.11). Работа данных компонентов описана выше.
На фиг.110 показан вариант осуществления промежуточного шарнирно-поворотного сочленения 4020 в соответствии с настоящим изобретением. Как можно видеть на данной фигуре, дистальный сегмент 4030 корпуса является полым и имеет проксимальный конец 4031, который содержит две проксимально выступающих лапки 4032, сформированных на нем. Каждая лапка 4032 может содержать выступающий из нее палец 4034 и, по меньшей мере, одно сформированное на ней фиксирующее ребро 4036. Проксимальный сегмент 4040 корпуса является полым и, как можно видеть на фиг.109, имеет проксимальный конец 4041, который содержит отверстие 128 для вмещения соответствующего радиального выступа 132 (показанного на фиг.10), сформированного на поворотной головке 28, описанной выше. Как можно видеть на фиг.110, дистальный конец 4042 проксимального сегмента 4040 корпуса может содержать пару дистально выступающих лапок 4044, каждая из которых содержит вмещающее палец отверстие 4046, проходящее сквозь нее, для вмещения соответствующего пальца 4034 дистального сегмента 4030 корпуса, чтобы дистальный сегмент 4030 корпуса мог поворачиваться относительно проксимального сегмента 4040 корпуса. Каждая лапка 4044 может содержать группу сформированных на ней радиальных канавок 4048 для сцепления с соответствующими противостоящими фиксирующими ребрами 4036 на лапках 4032. Следовательно, при сборке, пальцы 4034 и отверстия 4046 служат для определения второй оси A2-A2 шарнирного поворота и устанавливаются по посадке с зазором, чтобы дистальный сегмент 4030 корпуса мог поворачиваться в требуемое положение относительно проксимального сегмента 4040 корпуса при приложении усилия к дистальному сегменту 4030 корпуса, с одновременным удерживанием проксимального сегмента 4040 корпуса в неподвижном состоянии или наоборот. Взаимодействие между фиксирующими ребрами 4036 и канавками 4048 служит для удерживания дистального сегмента 4030 корпуса в требуемом положении относительно проксимального сегмента 4040 корпуса после прекращения действия усилия шарнирного поворота. В альтернативных вариантах осуществления фиксирующие ребра 4036 можно формировать на дистально выступающих лапках 4044, и радиальные канавки 4048 можно формировать на проксимально выступающих лапках 4032. В еще одних вариантах осуществления, по меньшей мере, один фиксирующий выступ 4036 может быть сформирован на лапке 4032, и радиальные канавки 4048 можно обеспечить на соединяемой с ней лапке 4044, и, по меньшей мере, один фиксирующий выступ 4036 можно обеспечить на другой лапке 4044, и канавки 4048 можно обеспечить на лапке 4032, соединяемой с данной лапкой 4044. При соединении промежуточным шарнирно-поворотным сочленением 4020, дистальный сегмент корпуса 4030 и проксимальный сегмент 4040 узла 414 удлиненного корпуса задают продольную ось L-L.
Как указано выше, система 4012 шарнирного поворота может дополнительно содержать передаточное звено 4050 шарнирного поворота, которое содержит проксимальный участок 4052, который содержит выступающий из него палец 164, который выполнен с возможностью вмещения в отверстие 548 в консоли 546 сдвигаемого элемента 138. Смотри фиг.109. Передаточное звено 4050 шарнирного поворота может дополнительно содержать дистальный участок 4054, который соединен на штифте с возможностью поворота с проксимальным участком 4052 так, что дистальный участок 4054 может поворачиваться относительно проксимального участка 4052 вокруг оси A2'-A2' шарнирного поворота. Дистальный конец дистального участка 4054 снабжен сформированным на нем дистальным крючком 165 для разъемного сцепления с крючковым участком передаточного звена шарнирного поворота в одноразовом загрузочном модуле 16 известным образом. Как также можно видеть на фиг.109, данный вариант осуществления может содержать пустотелую трубку 4060 чувствительного механизма, которая содержит дистальный участок 4062, которая соединена с возможностью поворота с проксимальным участком 4064 для поворотного перемещения относительно дистального участка вокруг оси A2''-A2'' шарнирного поворота. Дистальный участок 4062 и проксимальный участок 4064 трубки 4060 чувствительного механизма можно соединять свободно, чтобы трубка 4060 чувствительного механизма могла допускать некоторые отклонения осей компонентов. Например, в различных вариантах осуществления участки 4062 и 4064 трубки чувствительного механизма можно соединять так, чтобы допускать аксиальное перемещение ± 0,125'' данных компонентов одного относительно другого. Трубка 4060 чувствительного механизма может выполнять свою функцию таким же образом, как описано выше для трубки 176 чувствительного механизма, и может содержать соединенный с ней механизм блокировки штока управления (непоказанный) такого типа, который описан выше.
Как также можно видеть на фиг.109, система 4012 шарнирного поворота может содержать узел 4070 штока управления, который работает аналогично вышеописанному штоку 52 управления, за исключением сегмента 4074 шарнирного поворота, который соединяет между собой дистальный участок 4072 и проксимальный участок 4076. Сегмент 4074 шарнирного поворота может содержать набор сложенных послойно металлических полосок, который допускают изгибание узла 4070 штока управления в то время, как узел 4014 удлиненного корпуса шарнирно поворачивается в промежуточном шарнирно-поворотном сочленении 4042, но, при этом, остается достаточно жестким для аксиальной передачи усилий прошивки/отрезания из узла 12 рукоятки в одноразовый загрузочный модуль 16. Возможно также применение других конструкций гибкого сочленения. Кроме того, между проксимальным участком 4076 узла 4070 штока управления и трубкой 4060 чувствительного механизма можно обеспечить кольцо 4080, чтобы обеспечить дополнительную опору для узла 4070 штока управления в данной трубке. Специалистам со средним уровнем компетентности в данной области техники будет очевидно, что, в собранном состоянии, передаточное звено 4050 шарнирного поворота и трубка 4060 чувствительного механизма установлены внутри узла 4014 удлиненного корпуса так, что оси A2''-A2'' и A2'-A2', по существу, совпадают со второй осью A2-A2 шарнирного поворота. Аналогично, узел 4070 штока управления установлен внутри узла 4014 удлиненного корпуса так, что сегмент 4074 шарнирного поворота перекрывает промежуточное шарнирно-поворотное сочленение 4020.
На фиг.111 показано применение хирургического сшивающего скобками аппарата 4010 при «открытой» хирургической операции, когда одноразовый загрузочный модуль 16 и узел 4014 удлиненного корпуса введены в пациента через открытый разрез в ткани «T». Как очевидно из рассмотрения данной фигуры, инструментальный узел 17 можно селективно шарнирно повернуть вокруг первой оси A1-A1 шарнирного поворота путем управления рычагом 30 шарнирного поворота, как пояснялось выше. Одноразовый загрузочный модуль 16 можно также повернуть вокруг второй оси A2-А2 шарнирного поворота относительно проксимального сегмента 4040 корпуса узла 4014 удлиненного корпуса и узла 12 рукоятки путем «пассивного» приведения инструментального узла 17 в контакт с органом или другим участком тела или путем зажима одноразового загрузочного модуля 16 другим хирургическим инструментом, например, захватом (не показанным), для приложения внешнего усилия к инструментальному узлу 17, чтобы принудить его к шарнирному повороту вокруг второй оси A2-A2 шарнирного поворота. Специалисту со средним уровнем компетентности в данной области техники будет очевидно, что, после шарнирного поворота инструментального узла 17 в требуемое положение вокруг второй оси A2-A2 шарнирного поворота, данный узел удерживается в данном положении благодаря сцеплению между вышеописанными фиксирующими ребрами 4036 и радиальными канавками 4048. Для создания возможности эндоскопического применения сшивающего скобками аппарата 4010 через обычный троакар 4000, как показано на фиг.112, промежуточное шарнирно-поворотное сочленение 4020 можно обеспечить вблизи поворотной головки 28 так, чтобы шарнирно-поворотное сочленение 4020 могло оставаться снаружи троакара 4000, и, тем самым, узел 12 рукоятки можно было поворачивать вокруг второй оси A2-A2 шарнирного поворота, относительно участка хирургического сшивающего скобками аппарата 4010, выступающего в пациента через троакар 4000.
На фиг.113-115 показана система 5012 шарнирного поворота, которую можно применять с различными хирургическими сшивающими скобками аппаратами в соответствии с настоящим изобретением. Компоненты, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления, обозначаются ниже идентичными позициями элементов, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов. Система 5012 шарнирного поворота может содержать промежуточное шарнирно-поворотное сочленение 5020 в узле 5014 удлиненного корпуса, которое облегчает поворотное движение одноразового загрузочного модуля 16 относительно узла 12 рукоятки вокруг второй оси A2-A2 шарнирного поворота, которая, по существу, поперечна продольной оси L-L и первой оси A1-A1 шарнирного поворота. Узел 5014 удлиненного корпуса может содержать дистальный сегмент 5030 корпуса и проксимальный сегмент 5040 корпуса, которые соединены между собой в промежуточном шарнирно-поворотном сочленении 5020. Как показано на фиг.114, система 5012 шарнирного поворота может дополнительно содержать сдвигаемый элемент 138, который содержит выступающий вверх консольный участок 540, который содержит вырез 542, который сформирован в данном участке в размер для вмещения лапки 544, сформированной на цилиндре 178 чувствительного механизма. Дистальный конец сдвигаемого элемента 138 может содержать консоль 546, которая содержит отверстие 548, выполненное с возможностью вмещения пальца 164, продолжающегося из проксимального конца передаточного звена 4050 шарнирного поворота. К сдвигаемому элементу 138 прикреплен штифт 166, который может быть изготовлен из неабразивного материала, например, Тефлона® или металла, покрытого Тефлоном®, и в размер для вмещения в ступенчатую кулачковую поверхность 148 (показанную на фиг.11). Работа данных компонентов описана выше.
Как дополнительно показано на фиг.114, дистальный сегмент 5030 корпуса является полым и имеет проксимальный конец 5031, который содержит две проксимально выступающих лапки 5032. Каждая лапка 5032 содержит выступающий из нее палец 5034. Проксимальный сегмент 5040 корпуса является полым и содержит отверстие 128 для вмещения соответствующего радиального выступа 132, сформированного на поворотной головке 28, описанной выше. Смотри фиг.114 и 115. Дистальный конец 5042 проксимального сегмента 5040 корпуса может содержать пару дистально выступающих лапок 5044, каждая из которых содержит вмещающее палец отверстие (не показанное), проходящее сквозь нее, для вмещения соответствующего пальца 5034 дистального сегмента 5030 корпуса, чтобы дистальный сегмент 5030 корпуса мог поворачиваться относительно проксимального сегмента 5040 корпуса. В различных вариантах осуществления промежуточное шарнирно-поворотное сочленение 5020 может быть сформировано с радиальными канавками 4048 и фиксирующими ребрами 4036, как пояснялось выше. Промежуточное шарнирно-поворотное сочленение 5020 в других вариантах осуществления может быть выполнено без упомянутых радиальных канавок и фиксирующих ребер.
Система 5012 шарнирного поворота, показанная на фиг.113-115, является «активной» системой шарнирного поворота и может содержать тягу 5050 шарнирного поворота, которая имеет дистальный конец 5052, который шарнирным или иным способом прикреплен к дистальному сегменту 5030 корпуса посредством штифта 5054. Как показано на фиг.114, тяга 5050 шарнирного поворота может двигаться в удлиненном пазу 5043 под тягу, обеспеченном в проксимальном сегменте 5040 корпуса узла 5014 удлиненного корпуса. Для обеспечения дополнительной опоры для тяги 5050 шарнирного поворота, сверху на проксимальный сегмент 5040 корпуса можно надевать кожух 5080. Смотри фиг.113 и 115. Тяга 5050 шарнирного поворота может иметь проксимальный конец 5056, который сформирован в одно целое или иным образом неподвижно соединен со стабилизирующей втулкой 5060. Стабилизирующая втулка 5060 может быть выполнена в размер для посадки на проксимальный сегмент 5040 корпуса и содержит соединенный с ней базовый участок 5062, который скреплен или сформирован с кнопочной стойкой 5064, которая заканчивается кнопкой 5066 шарнирного поворота. Как можно видеть на фиг.114 и 115, базовый участок 5062 может быть сформирован с двумя выступающими вверх упорными фиксаторами 5068, которые выполнены для сцепления с возможностью удерживания с фиксирующими рейками 5072, сформированными на двух фиксирующих пластинах 5070, которые неподвижно установлены в поворотную головку 28. Как показано на фиг.114 и 115, можно применить две фиксирующие пластины 5070, по одной с каждой стороны кнопочной стойки 5064.
Как показано на фиг.113, для шарнирного поворота дистального сегмента 5030 корпуса, а также дистального участка 4072 узла 4070 штока управления (и присоединенного к нему одноразового загрузочного модуля) в направлении вправо «RD» вокруг второй оси A2-A2 шарнирного поворота, врач просто сдвигает кнопку 5066 шарнирного поворота в дистальном направлении «D-D». Чтобы шарнирно повернуть дистальный сегмент 5030 корпуса, дистальный участок 4072 узла 4070 штока управления и одноразовый загрузочный модуль в левом направлении «LD», врач сдвигает кнопку 5066 шарнирного поворота в проксимальном направлении «PD». Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что систему 5020 шарнирного поворота можно эффективно применять с хирургическими сшивающими скобками аппаратами, которые выполнены с возможностью вмещения шарнирно-поворачиваемых и нешарнирных одноразовых загрузочных модулей. Система 5020 шарнирного поворота, показанная на фиг.113-115, выполнена с возможностью эффективного применения для открытых хирургических операций. Система 5012' шарнирного поворота, показанная на фиг.116, может быть более пригодна для эндоскопических операций. Как можно видеть на данной фигуре, шарнирно-поворотное сочленение 5020 находится ближе к поворотной головке 28, так что, при применении, шарнирно-поворотное сочленение 5020 находится снаружи троакара, через который продолжается дистальный сегмент 5030 корпуса узла 5014 удлиненного корпуса.
На фиг.117-121 показана оригинальная новая «активная» система 6012 шарнирного поворота, которую можно применять в соединении с различными хирургическими сшивающими скобками аппаратами, выполненными с возможностью применения с одноразовыми загрузочными модулями. Компоненты системы 6012 шарнирного поворота, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления, обозначаются ниже идентичными позициями, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов. В различных вариантах осуществления система 6012 шарнирного поворота содержит узел 6028 поворотной головки, который, за исключением отмеченных ниже отличий, аналогичен вышеописанной поворотной головке 28. Как можно видеть на фиг.118, поворотная головка 6028 содержит шарнирно-поворотный насадок 6030 кожуха, который содержит сформированную на нем дистальную шаровую опору 6032 шарнирного поворота. В различных вариантах осуществления узел 6028 поворотной головки может быть сформирован из двух сегментов 6028a и 6028b, которые отформованы из пластика или другого подходящего материала, и которые могут быть соединены между собой, например, защелкивающимися элементами, винтами, клеем и т.п. Смотри фиг.117. На дистальную шаровую опору 6032 шарнирного поворота посажен, с возможностью поворота, дистальный сегмент 6040 корпуса с проксимальным сегментом 6042, который формирует гнездо 6044 шарнирного поворота, которое может быть сформировано из охватывающих сегментов 6040a и 6040b, которые могут быть соединены между собой, например, защелкивающимися элементами, винтами, клеем и т.п. Как показано на фиг.118, система 6012 шарнирного поворота может также содержать сдвиговый элемент, тип и конструкция которого описаны выше, и который выполнен с возможностью вмещения пальца 164, продолжающегося из проксимального конца передаточного звена 4050' шарнирного поворота. Передаточное звено 4050' шарнирного поворота аналогично вышеописанному передаточному звену 4050 шарнирного поворота, за исключением того, что передаточное звено 4050' шарнирного поворота содержит сформированный в нем гибкий соединительный участок (цилиндрическую пружину и т.п.) 6025.
Как можно видеть на фиг.118, система 6012 шарнирного поворота может дополнительно содержать полую трубку 6060 чувствительного механизма, которая имеет дистальный концевой участок 6062, который соединен с проксимальным участком 6064 гибким соединителем (цилиндрической пружиной и т.п.) 6066. Трубка 6060 чувствительного механизма может работать таким способом, который описан выше для трубки 123 чувствительного механизма, и может содержать присоединенный к ней механизм блокировки штока управления (не показанный) такого типа, который описан выше. Как также можно видеть на фиг.118, система 6012 шарнирного поворота может содержать узел 6070 штока управления, который работает аналогично вышеописанному штоку 52 управления, исключая гибкий соединительный сегмент 6074, который соединяет между собой дистальный участок 6072 и проксимальный участок 6076. Гибкий соединительный сегмент 6074 может содержать цилиндрическую пружину и т.п., которая позволит изгибать узел 6070 штока управления во время шарнирного поворота, но является достаточно жестким для аксиальной передачи усилий прошивки/отрезания из узла 12 рукоятки в одноразовый загрузочный модуль 16. Как можно видеть на фиг.118 и 119, узел 6070 штока управления продолжается через трубку 6060 чувствительного механизма, и проксимальный концевой участок 6076 устанавливается в упомянутую трубку кольцом 6068. Чтобы обеспечить дополнительную осевую опору для проксимального участка 6076 узла 6070 штока управления и гибкого соединительного сегмента 6074, можно применить проксимальную трубку 6080 прошивного штока. Смотри фиг.118 и 119. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что, в собранном состоянии, гибкий соединительный участок 6025 передаточного звена 4050' шарнирного поворота, гибкий соединительный участок 6066 трубки 6060 чувствительного механизма и гибкий соединительный сегмент 6074 установлены в шаровой опоре 6032 шарнирного поворота, как показано на фиг.119.
Как можно видеть на фиг.118 и 119, система 6012 шарнирного поворота дополнительно содержит кольцо 6090 шарнирного поворота, которое установлено с возможностью перемещения на дистальном конце 6034 насадка 6030 кожуха. В различных вариантах осуществления кольцо 6090 шарнирного поворота может быть сформировано из двух дуговидных сегментов 6090a и 6090b, которые соединены между собой, например, винтами 6091 или другими подходящими крепежными конструкциями. Кольцо 6090 шарнирного поворота соединено с двумя диаметрально противоположными лентами 6100 горизонтального шарнирного поворота и двумя диаметрально противоположными лентами 6110 вертикального шарнирного поворота. Смотри фиг.118. Как показано на фиг.120 и 121, в различных вариантах осуществления проксимальный конец 6102 каждой ленты 6100 горизонтального шарнирного поворота может быть шарнирно соединен со штифтом 6104 горизонтального шарнирного поворота. Аналогично, проксимальный конец 6112 каждой ленты 6110 вертикального шарнирного поворота может быть шарнирно соединен со штифтом 6114 вертикального шарнирного поворота. На фиг.120 и 121 показана одна форма крепления проксимального конца 6102 ленты 6100 горизонтального шарнирного поворота к штифту 6104 горизонтального шарнирного поворота, а также крепления проксимального конца 6112 ленты 6110 вертикального шарнирного поворота к штифту 6114 вертикального шарнирного поворота. Как можно видеть на данных фигурах, шаровой шарнир 6120 может быть соединен с дистальными концами 6102, 6112 и вмещен с возможностью поворота в соответствующее гнездо 6108, 6118 в штифтах 6104, 6114, соответственно, горизонтального и вертикального шарнирного поворота. Штифты 6104 горизонтального шарнирного поворота могут продолжаться сквозь диаметрально противоположные горизонтальные прорези 6036 (фиг.118) в проксимальном концевом участке 6034 насадки 6030 кожуха для вмещения в отверстия 6092 в кольце 6090 шарнирного поворота. Аналогично, штифты 6114 вертикального шарнирного поворота продолжаются сквозь вертикальные прорези 6038, сформированные в проксимальном концевом участке 6034 насадки 6030 кожуха для вмещения в отверстия 6094 в кольце 6090 шарнирного поворота.
В различных вариантах осуществления ленты 6100 горизонтального шарнирного поворота и ленты 6110 вертикального шарнирного поворота могут содержать металлические ленты, которые будут изгибаться или деформироваться по их оси ослабленного сопротивления (т.е. оси, которая продолжается поперечно их длине), но не будут изгибаться или деформироваться по их оси высокого сопротивления (т.е. их длинной оси, продолжающейся вдоль их длины). Для обеспечения опоры для лент 6100, 6110 шарнирного поворота вдоль их соответствующих длин, ленты 6100 горизонтального шарнирного поворота могут быть установлены с возможностью перемещения в удлиненные горизонтальные пазы 6033, сформированные в удлиненный кожух 6030. Дистальный конец 6106 каждой ленты 6100 горизонтального шарнирного поворота может содержать выступающий из него дистальный штифт 6109 шарнирного поворота, который продолжается сквозь соответствующую горизонтальную прорезь 6037 в шаровом опорном участке 6032 удлиненного кожуха 6030, для соединения с дистальным сегментом 6040 корпуса. В различных вариантах осуществления дистальный штифт 6109 шарнирного поворота продолжается сквозь отверстие в соответствующем дистальном конце 6106 ленты 6100 горизонтального шарнирного поворота, чтобы позволить дистальному концу 6106 данной ленты поворачиваться вокруг данного штифта. Аналогично, дистальный конец 6116 каждой ленты 6110 вертикального шарнирного поворота может содержать выступающий из него дистальный штифт 6119 шарнирного поворота, который продолжается сквозь соответствующую вертикальную прорезь 6039 в шаровом опорном участке 6032 удлиненного кожуха 6030, для соединения с дистальным сегментом 6040 корпуса. Смотри фиг.119. Дистальные штифты 6119 шарнирного поворота могут продолжаться сквозь отверстие в дистальном конце 6116 соответствующей ленты 6110 вертикального шарнирного поворота, чтобы позволить дистальному концу 6116 поворачиваться вокруг данного штифта.
Хотя на фиг.117-118 и не показано специально, специалистам со средним уровнем компетентности в данной области техники будет очевидно, что дистальный сегмент 6040 корпуса может быть выполнен для рабочего соединения с шарнирно-поворачиваемым одноразовым загрузочным модулем или нешарнирным одноразовым загрузочным модулем с использованием способа, описанного выше или известного в технике. Однако, в настоящем варианте осуществления врач может селективно шарнирно поворачивать дистальный сегмент 6040 корпуса и прикрепленный к нему одноразовый загрузочный модуль посредством селективного поворота кольца 6090 шарнирного поворота на проксимальном конце 6034 надставки 6030 кожуха. Например, на фиг.119 показано кольцо 6090 шарнирного поворота, повернутое в положение, в котором дистальный сегмент 6040 корпуса повернут в вертикальном направлении «VD». Чтобы повернуть дистальный сегмент 6040 корпуса в горизонтальном направлении (в направлении, перпендикулярном направлению VD, показанном на фиг.119), врач сначала приводит кольцо шарнирного поворота обратно в нейтральное вертикальное положение (в котором дистальный сегмент 6040 корпуса является соосным надставке 6030 кожуха), и затем врач поворачивает кольцо шарнирного поворота так, чтобы на одной стороне участок кольца 6090 перемещался в дистальном направлении, а другая сторона перемещалась в проксимальном направлении (обозначенными стрелками «DD» и «PD» на фиг.117). Подобный активный шарнирный поворот содержит, по существу, шарнирные повороты в двух плоскостях. То есть, дистальный сегмент 6040 корпуса и соединенный с ним одноразовый загрузочный модуль можно селективно шарнирно поворачивать только в вертикально продолжающейся плоскости или только в горизонтально продолжающейся плоскости, которая, по существу, ортогональна вертикально продолжающейся плоскости. Дистальный сегмент 6040 корпуса и одноразовый загрузочный модуль невозможно шарнирно повернуть одновременно в вертикальном и горизонтальном направлениях. Однако, специалистам со средним уровнем компетентности в данной области техники будет очевидно, что поворотная головка 6028, благодаря ее присоединению с возможностью поворота к узлу рукоятки, облегчает селективный поворот дистального сегмента 6040 корпуса и соединенного с ним одноразового загрузочного модуля вокруг продольной оси L-L.
На фиг.122 и 123 представлен другой вариант осуществления хирургического сшивающего скобками аппарата 7010 в соответствии с настоящим изобретением, в котором применяется пассивная система 7012 шарнирного поворота. Как можно видеть на данных фигурах, пассивная система 7012 шарнирного поворота может содержать поворотную головку 7028, которая отчасти аналогична вышеописанной поворотной головке 28, за исключением нижеописанных отличий. Компоненты хирургического сшивающего скобками аппарата 7010, которые идентичны компонентам, применяемым в вышеупомянутых вариантах осуществления, обозначаются ниже идентичными позициями элементов, и специалисты со средним уровнем компетентности в данной области техники могут обращаться к вышеприведенным разделам настоящего описания, которые поясняют конструкцию и работу упомянутых компонентов. Как можно видеть на фиг.123, поворотная головка 7028 содержит сформированное в ней гнездо 7030 шарнирного поворота, которое выполнено в размер для вмещения с возможностью поворота шаровой опоры 7016, сформированной на узле 7014 удлиненного корпуса. В альтернативных вариантах осуществления гнездо 7030 может быть сформировано в сегменте обоймы, который неповоротно установлен в поворотной головке 7028. Дистальный конец 7015 узла 7014 удлиненного корпуса выполнен для рабочего соединения известным способом с шарнирно-поворачиваемым или нешарнирным одноразовым загрузочным модулем. Как также можно видеть на фиг.123, система 7012 шарнирного поворота может дополнительно содержать сдвигаемый элемент 138, который содержит выступающий вверх консольный участок 540, который содержит вырез 542, который сформирован в данном участке в размер для вмещения лапки (не показанной), сформированной на цилиндре чувствительного механизма (не показанном) вышеописанным способом. Дистальный конец сдвигаемого элемента 138 может содержать консоль 546, которая содержит отверстие 548, выполненное с возможностью вмещения пальца 164, продолжающегося из проксимального конца 7052 передаточного звена 7050 шарнирного поворота. Дистальный конец 7054 передаточного звена 7050 шарнирного поворота содержит сформированный на нем дистальный крючок 165, который может сцепляться крючком с лапкой или крючком шарнирного поворота, сформированной(ым) на передаточном звене шарнирного поворота, установленным в одноразовый загрузочный модуль. К сдвигаемому элементу 138 прикреплен штифт 166, который может быть изготовлен из неабразивного материала, например, Тефлона® или металла, который покрыт Тефлоном®, и в размер для вмещения в ступенчатую кулачковую поверхность 148 (смотри фиг.11). Как можно видеть на фиг.123, в передаточном звене 7050 шарнирного поворота, вблизи его проксимального конца 7052, может быть обеспечен гибкий элемент 7055 в форме цилиндрической пружины или чего-то подобного.
Пассивная система 7012 шарнирного поворота может дополнительно содержать полую трубку 7060 чувствительного механизма, которая имеет дистальный концевой участок 7062, который соединен с проксимальным участком 7064 гибким соединителем (цилиндрической пружиной и т.п.) 7066. Трубка 7060 чувствительного механизма может работать таким способом, который описан выше для трубки 123 чувствительного механизма, и может содержать присоединенный к ней механизм блокировки штока управления (не показанный) такого типа, который описан выше. Как также можно видеть на фиг.123, система 7012 шарнирного поворота может содержать узел 7070 штока управления, который работает аналогично вышеописанному штоку 52 управления, исключая гибкий соединительный сегмент 7074, который соединяет между собой дистальный участок 7072 и проксимальный участок 7076. Гибкий соединительный сегмент 7074 может содержать цилиндрическую пружину и т.п., которая позволит изгибать узел 7070 штока управления во время шарнирного поворота, но является достаточно жестким для аксиальной передачи усилий прошивки/отрезания из узла 12 рукоятки в одноразовый загрузочный модуль 16. Узел 7070 штока управления прошивкой/отрезанием продолжается сквозь трубку 7060 чувствительного механизма, и дистальный конец 7072 устанавливается в данную трубку кольцом 7068. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что, в собранном состоянии, гибкий соединительный участок 7055 передаточного звена 7050 шарнирного поворота, гибкий соединительный участок 7066 трубки 7060 чувствительного механизма и гибкий соединительный сегмент 7074 узла 7070 штока направления, по меньшей мере, частично установлены в шаровой опоре 7016 шарнирного поворота и гнезде 7030.
На фиг.122 показано применение хирургического сшивающего скобками аппарата 7010 в соответствии с настоящим изобретением с обычным троакаром 4000. Как можно видеть на данной фигуре, одноразовый загрузочный модуль 16 присоединен к узлу 7014 удлиненного корпуса. Хотя на фигуре показан шарнирно-поворачиваемый одноразовый загрузочный модуль 16, специалисту со средним уровнем компетентности в данной области техники будет понятно, что аппарат 7012 можно эффективно использовать с нешарнирными одноразовыми загрузочными модулями. После того, как троакар 4000 вставлен сквозь ткань «T» с использованием известных методов, врач может ввести одноразовый загрузочный модуль 16 сквозь троакар в пациента. Если применяется шарнирно-поворачиваемый одноразовый загрузочный модуль 16, врач должен ориентировать одноразовый загрузочный модуль в шарнирно неповернутое состояние для его введения по троакару. После того, как одноразовый загрузочный модуль 16 введен в пациента и приведен в действие для сжатия на намеченной ткани вышеописанным образом, врач может шарнирно повернуть рукоятку простым поворотом узла 12 рукоятки в шаровом шарнирно-поворотном сочленении 7020. Шаровой участок 7016 может иметь такой размер относительно гнезда 7030, чтобы величина силы трения покоя между компонентами была достаточной для удерживания данных компонентов в заданном положении, но не настолько большой, чтобы не допускать манипулирования данными компонентами для их перемещения друг относительно друга. В других вариантах осуществления можно обеспечить упоры в компонентах шарового шарнирного сочленения для удерживания сочленения в различных положениях. Врач может также манипулировать узлом 12 рукоятки относительно узла 7014 удлиненного корпуса перед сжатием на намеченной ткани посредством захвата проксимального конца узла удлиненного корпуса, выступающего из троакара 4000 и последующего манипулирования узлом 12 рукоятки относительно него.
Выше описано несколько вариантов осуществления изобретения, однако, должно быть очевидно, что специалисты со средним уровнем компетентности в данной области техники смогут создать различные модификации, изменения и доработки к данным вариантам осуществления с получением некоторых или всех преимуществ изобретения. Например, в соответствии с различными вариантами осуществления, для выполнения заданной функции или функций, единственный компонент можно заменять несколькими компонентами, и несколько компонентов можно заменять одним компонентом. Поэтому настоящее предположение предполагает охват всех подобных модификаций, изменений и доработок, не выходящих за пределы объема и существа описанного изобретения, заданных прилагаемой формулой изобретения.
Устройства, описанные в настоящей заявке, могут быть предназначены для удаления в отходы после однократного использования, или устройства могут быть предназначены для многократного использования. Однако, в каждом случае, устройство можно восстанавливать для повторного использования после, по меньшей мере, одного использования. Восстановление может содержать любую комбинацию этапов разборки устройства, затем чистки или замены конкретных деталей, и последующей повторной сборки. В частности, устройство можно разбирать, и любое число конкретных деталей или частей устройства можно селективно заменять или демонтировать в любой комбинации. После чистки и/или замены конкретных частей, устройство можно повторно собирать для последующего использования либо в ремонтном учреждении, либо группой хирургов непосредственно перед хирургической операцией. Специалистам со средним уровнем компетентности в данной области техники будет очевидно, что восстановление устройства можно выполнять множеством разных методов разборки, чистки/замены и повторной сборки. Применение данных методов и полученного восстановленного устройства находится в пределах объема настоящей заявки.
Изобретение, описанное в настоящей заявке, будет проходить обработку перед хирургической операцией. Сначала получают и, при необходимости, чистят новый или использованный инструмент. Затем инструмент можно стерилизовать. Согласно одному методу стерилизации, инструмент помещают в закрытый или герметично закрытый контейнер, например, пакет из пластика или материала TYVEK®. Затем контейнер и инструмент помещают в поле излучения, которое может проникать сквозь контейнер, например, гамма-излучения, рентгеновского излучения или высокоэнергетических электронов. Излучение убивает бактерии на инструменте и в контейнере. Затем стерилизованный инструмент можно хранить в стерильном контейнере. Герметично закрытый контейнер сохраняет инструмент в стерильном состоянии, пока контейнер не открывают в медицинском учреждении.
Любые патент, публикация или другие данные описания, в целом или частично, которые упомянуты как включенные в настоящее описание путем отсылки, включены в настоящее описание только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании. По существу, и в необходимых пределах, сведения, приведенные в явном виде в настоящем описании, заменяют собой любые противоречащие данные, включенные в настоящее описание путем отсылки. Любые данные, или их часть, которые упомянуты как включенные в настоящее описание путем отсылки, но которые противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании, будут включаться только в таких пределах, в которых не возникает противоречия между упомянутыми включенными данными и существующими данными изобретения,
Изобретение, которое предлагается для защиты, нельзя толковать как ограниченное конкретными описанными вариантами осуществления. Поэтому варианты осуществления следует считать наглядными, а не ограничивающими. Другими специалистами могут быть созданы варианты и внесены изменения, не выходящие за пределы сущности настоящего изобретения. Соответственно, прямо предполагается, что настоящим документом должны охватываться все подобные эквиваленты, варианты и изменения, которые находятся в пределах сущности и объема настоящего изобретения, определенных формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
| ОДНОРАЗОВЫЙ ЗАГРУЗОЧНЫЙ МОДУЛЬ С ИНДИКАТОРОМ ПРОШИВКИ/ОТРЕЗАНИЯ | 2009 |
|
RU2489101C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ОТВОДНЫМ ВЫСТРЕЛИВАНИЕМ | 2009 |
|
RU2493789C2 |
| ОДНОРАЗОВЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2492818C2 |
| ОДНОРАЗОВЫЙ ЗАГРУЗОЧНЫЙ МОДУЛЬ ДЛЯ ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО СКОБКАМИ АППАРАТА | 2009 |
|
RU2492819C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С БЛОКИРУЕМОЙ СИСТЕМОЙ ВЫСТРЕЛИВАНИЯ | 2009 |
|
RU2492820C2 |
| РАБОЧИЕ ОРГАНЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2497464C2 |
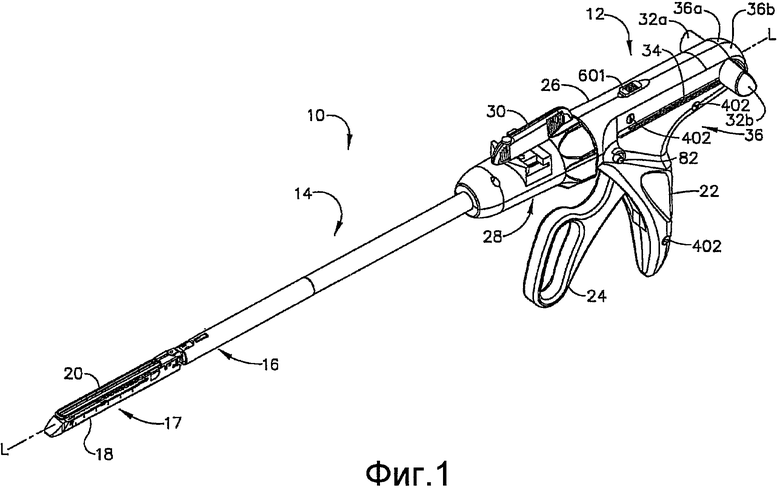
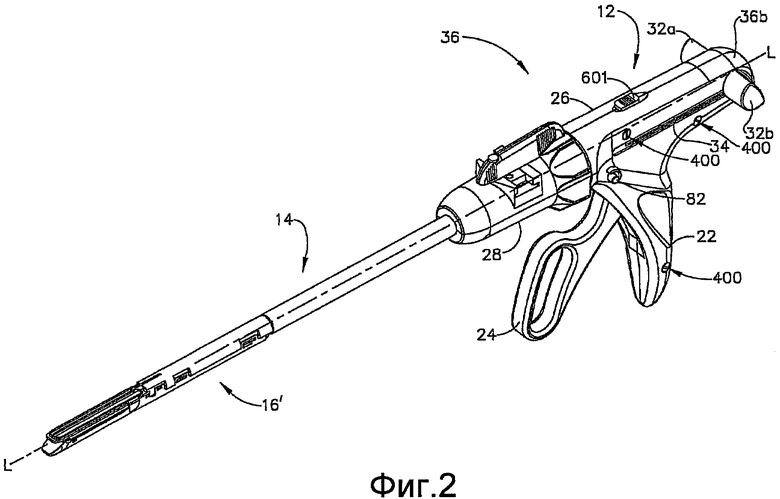
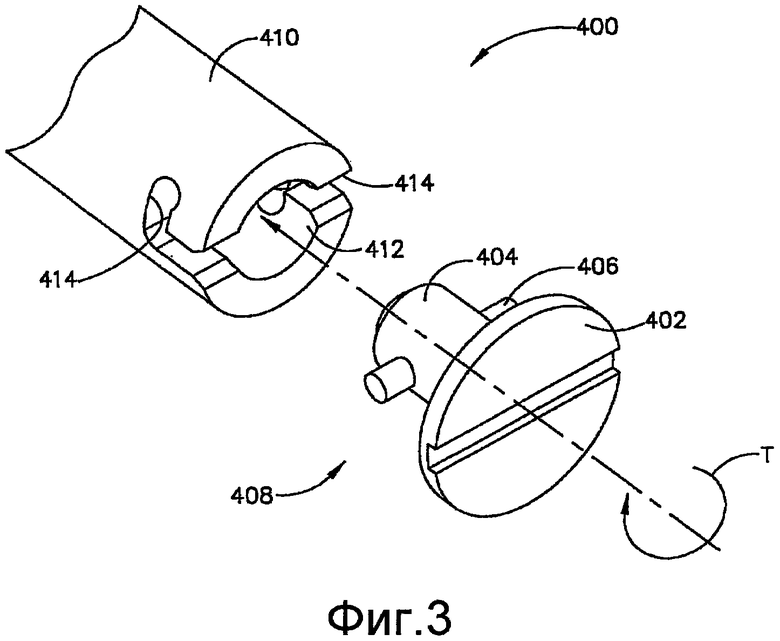
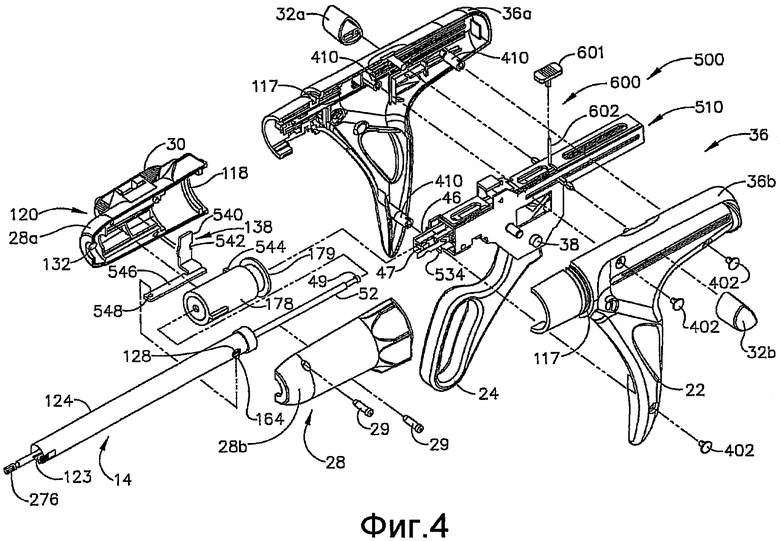
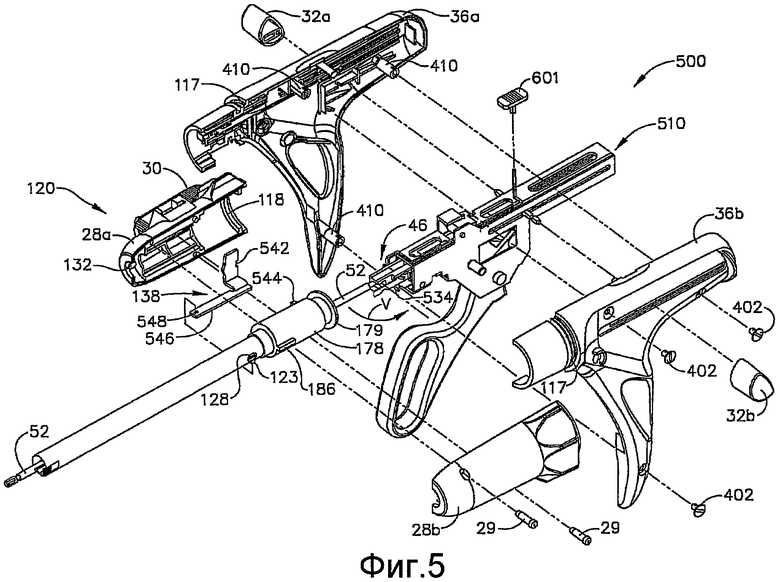
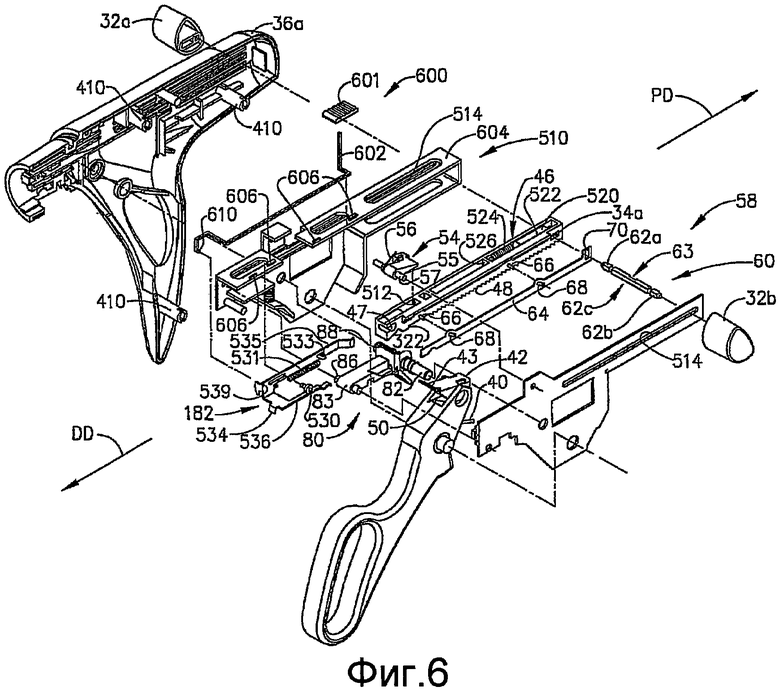
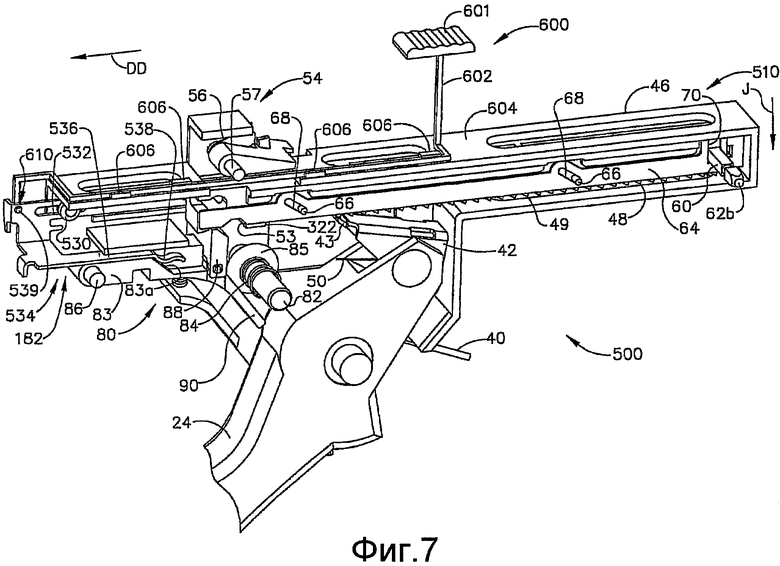
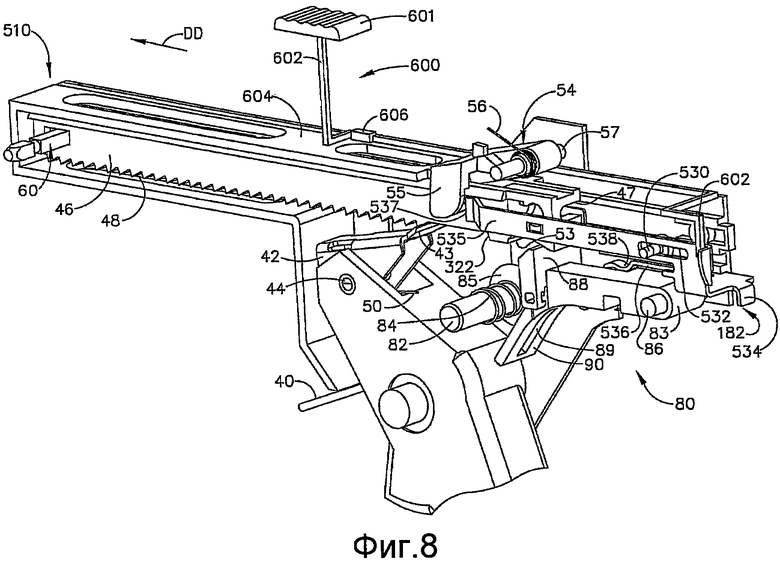
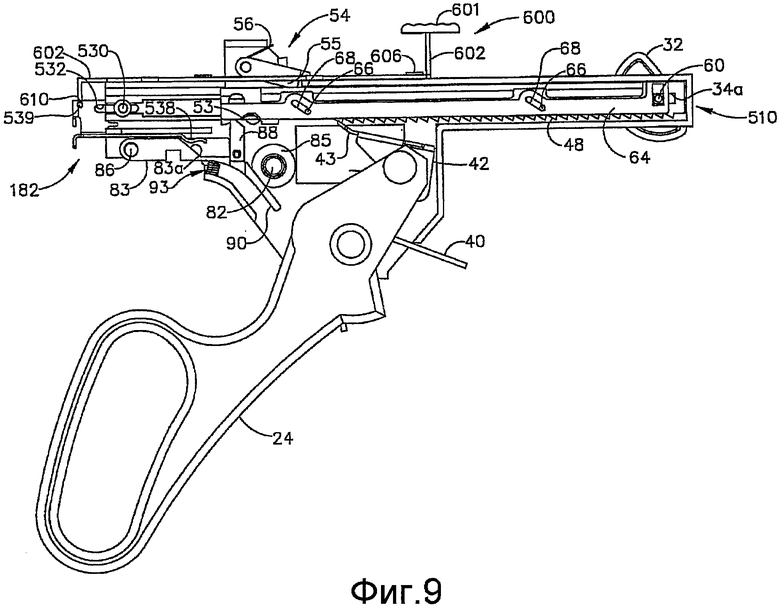
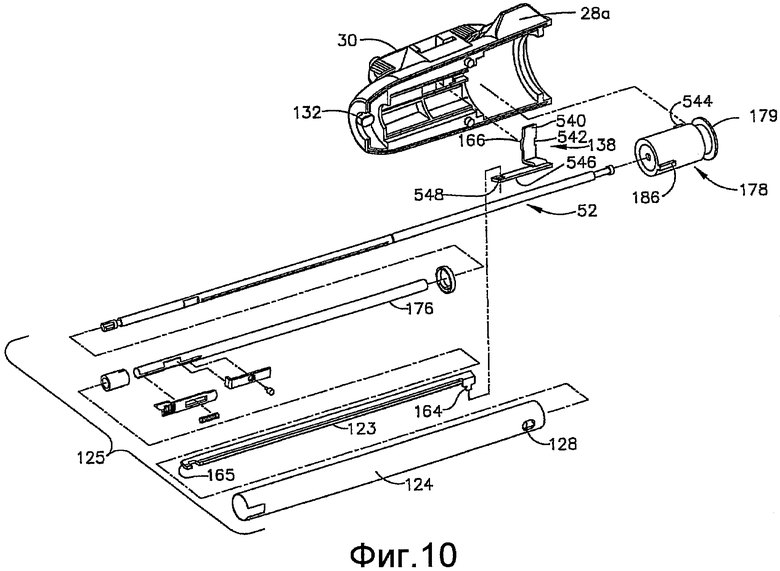
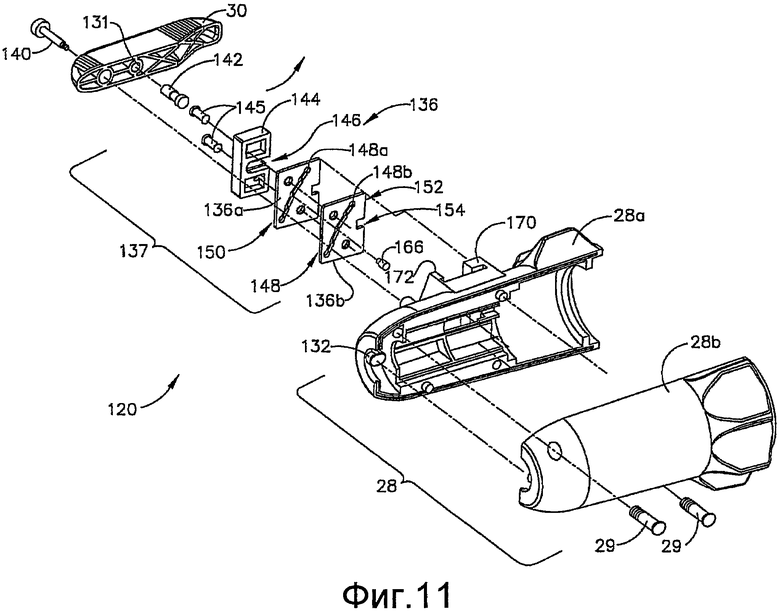
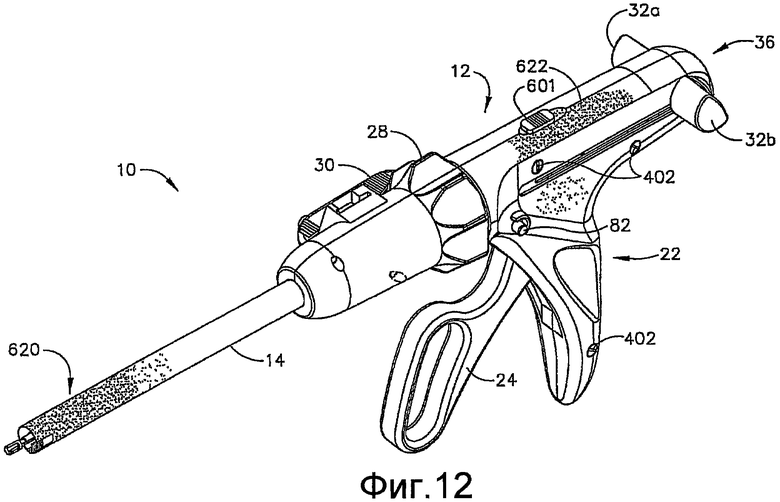
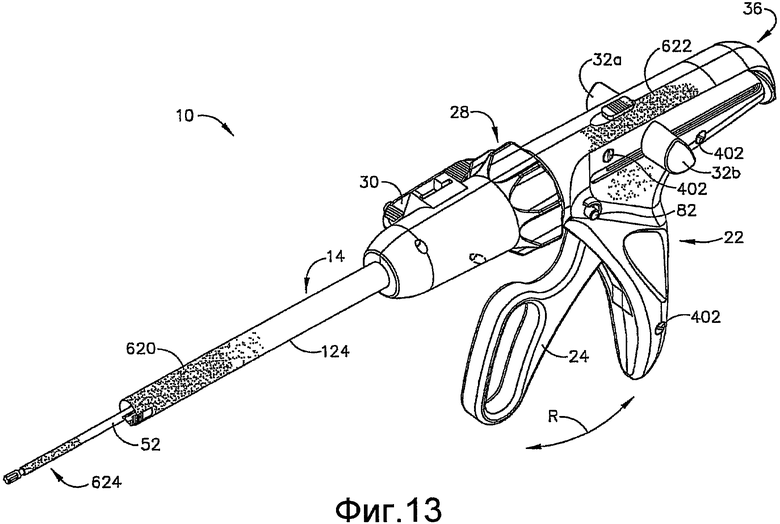
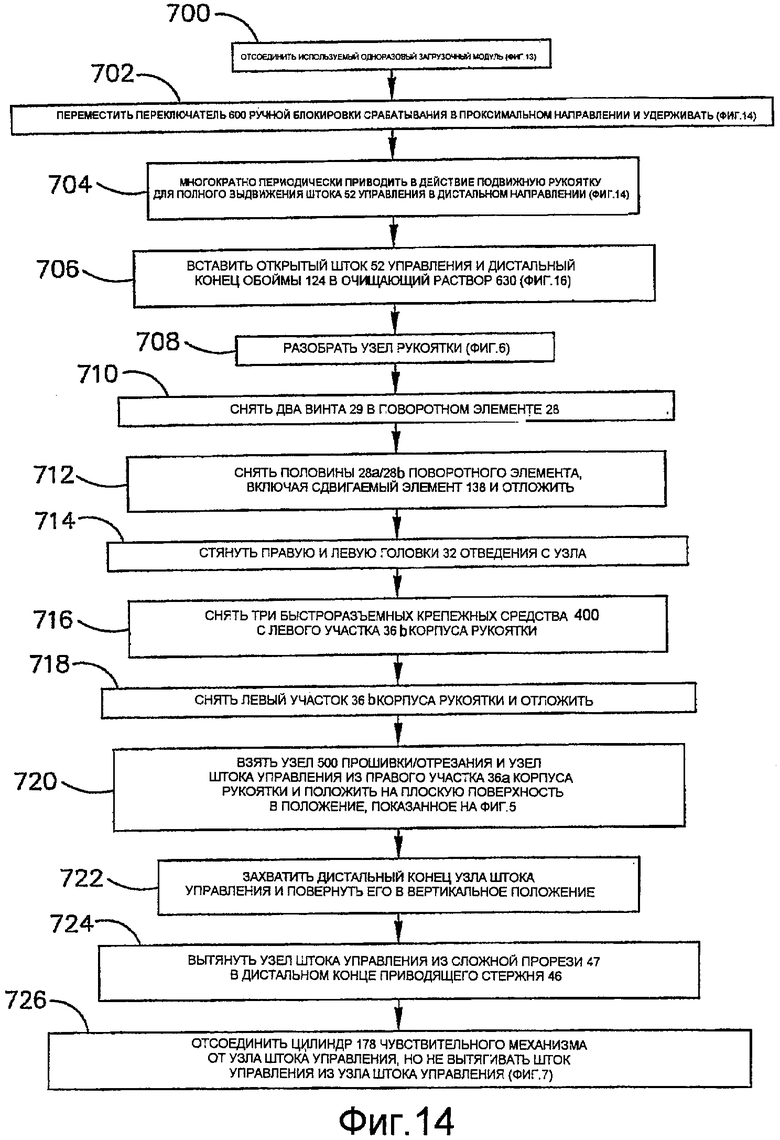
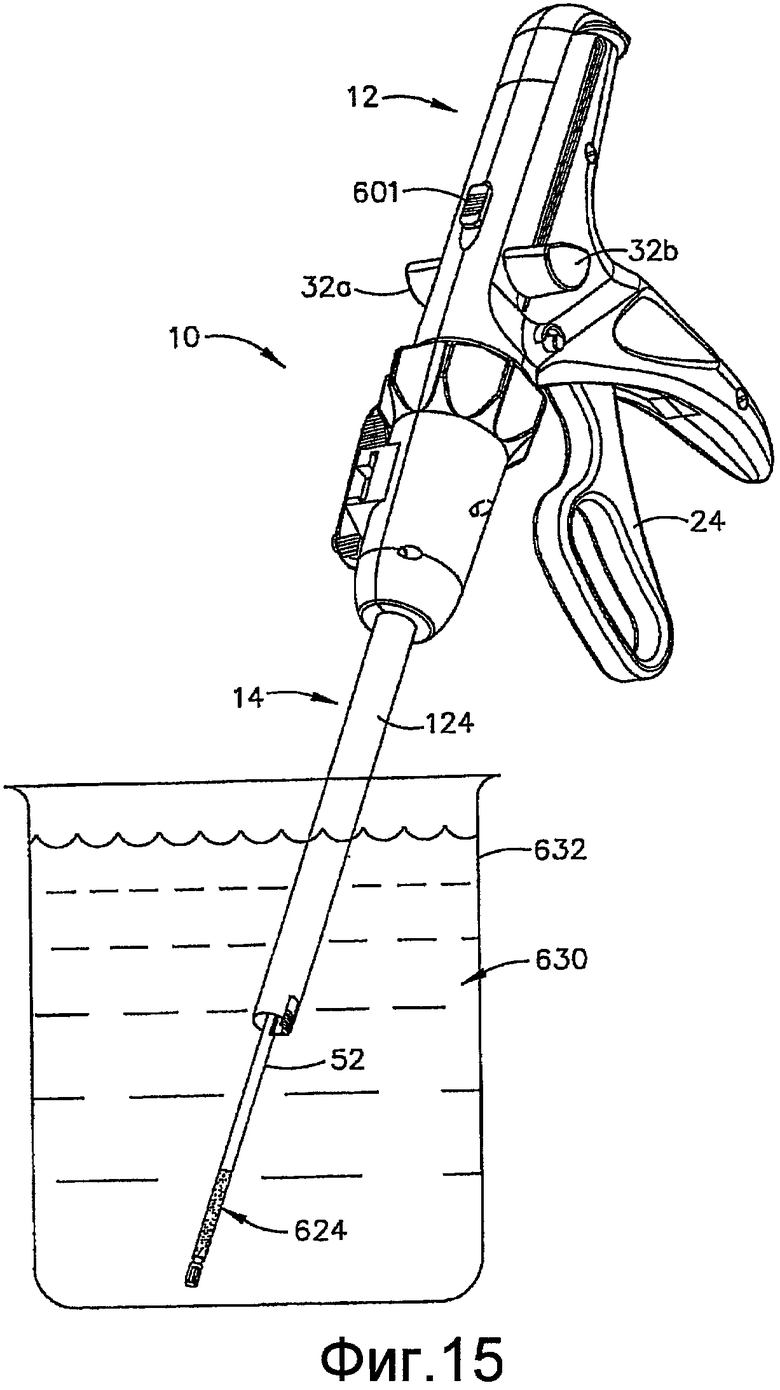
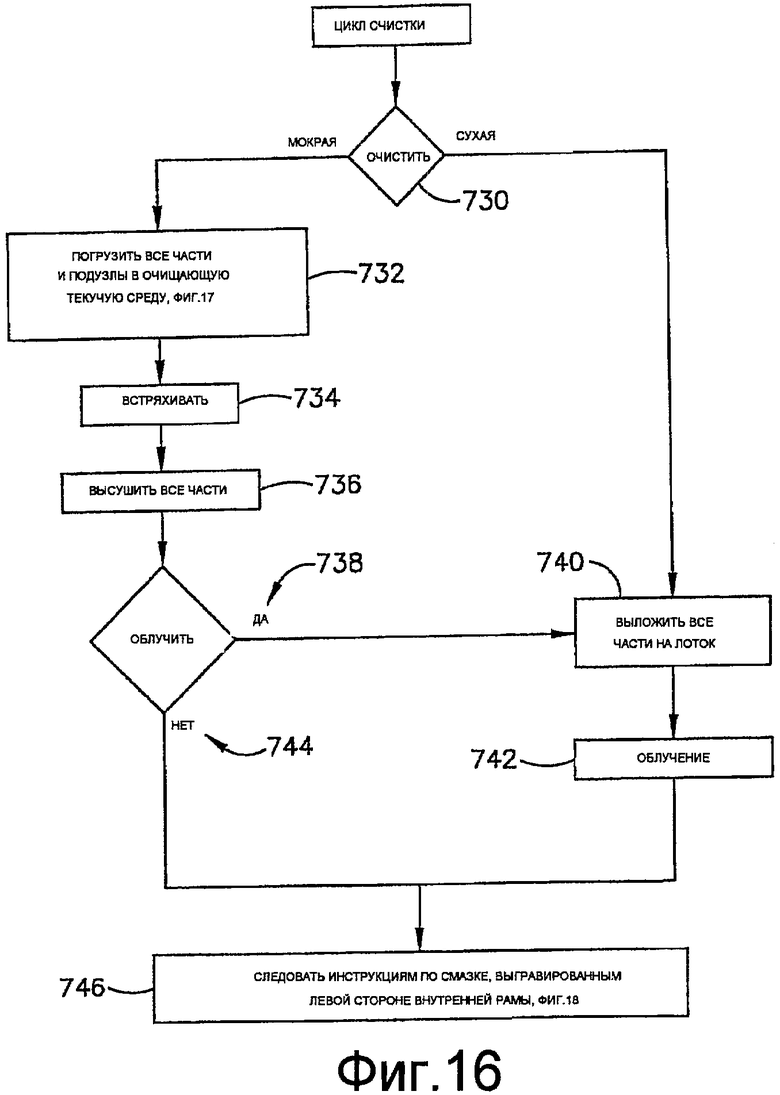
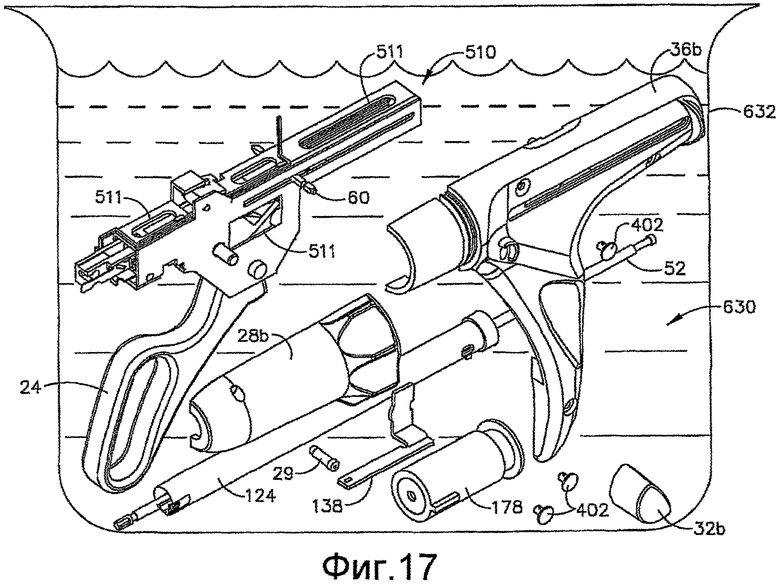
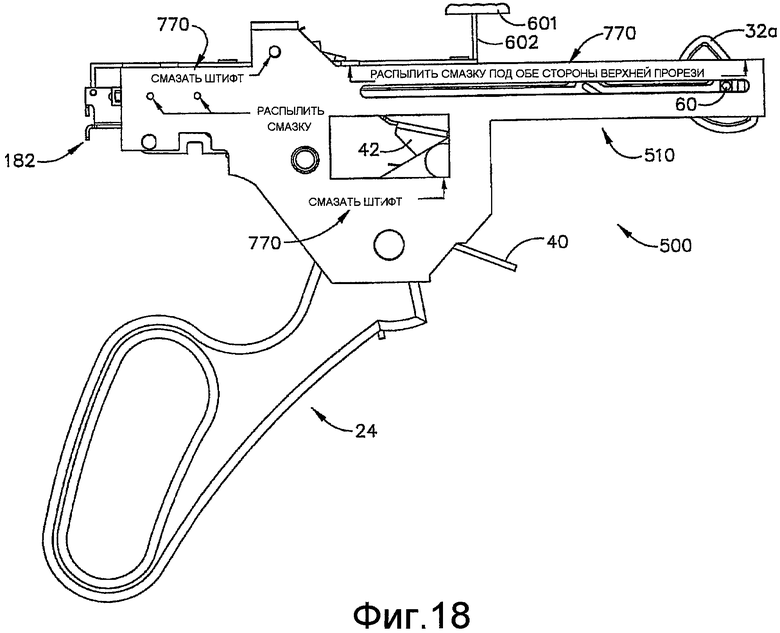
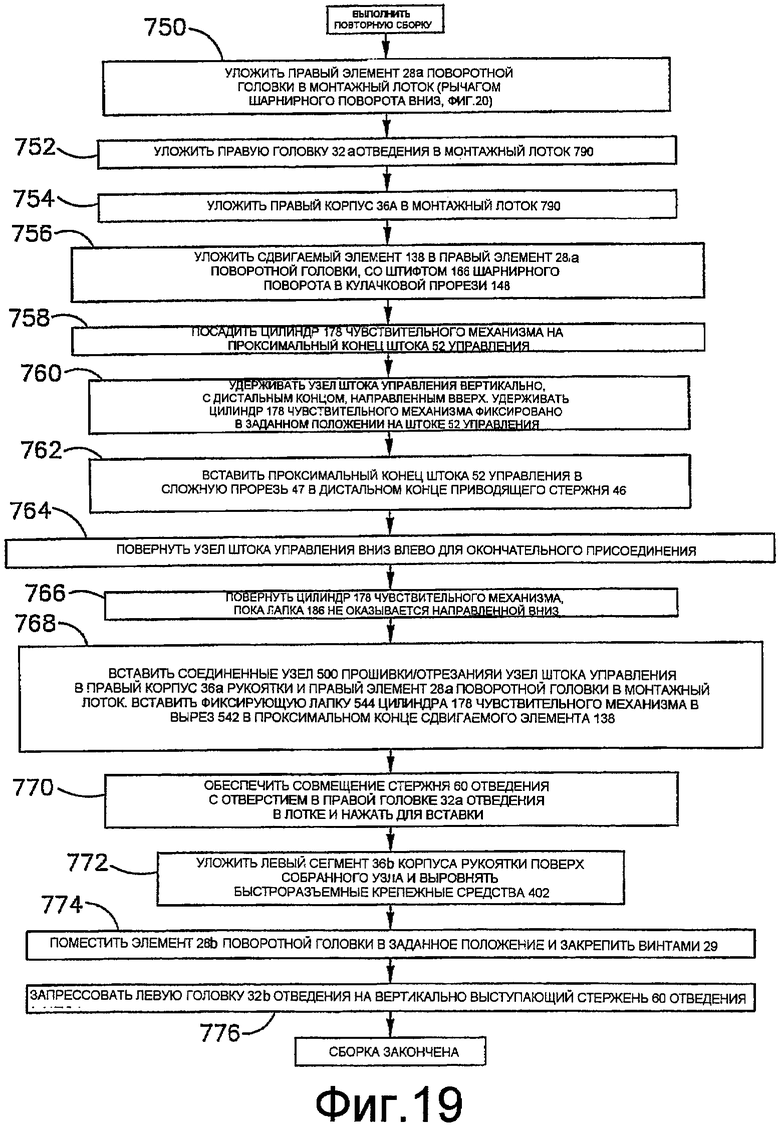
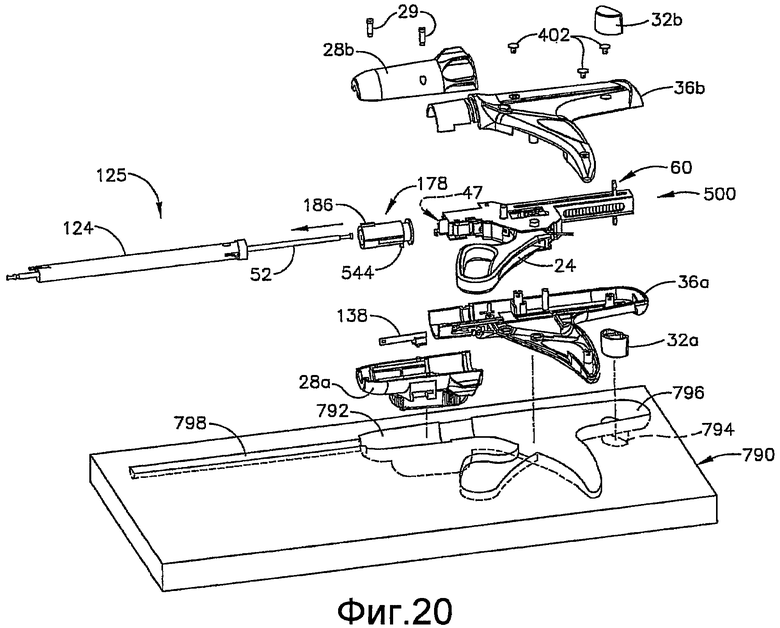
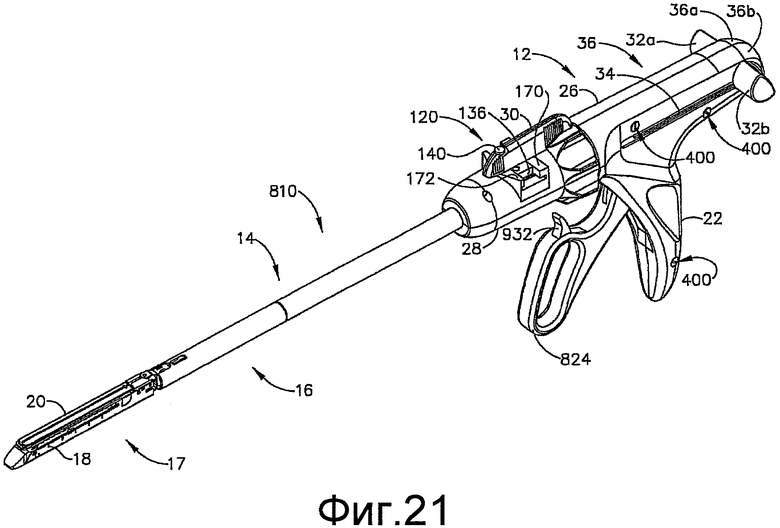

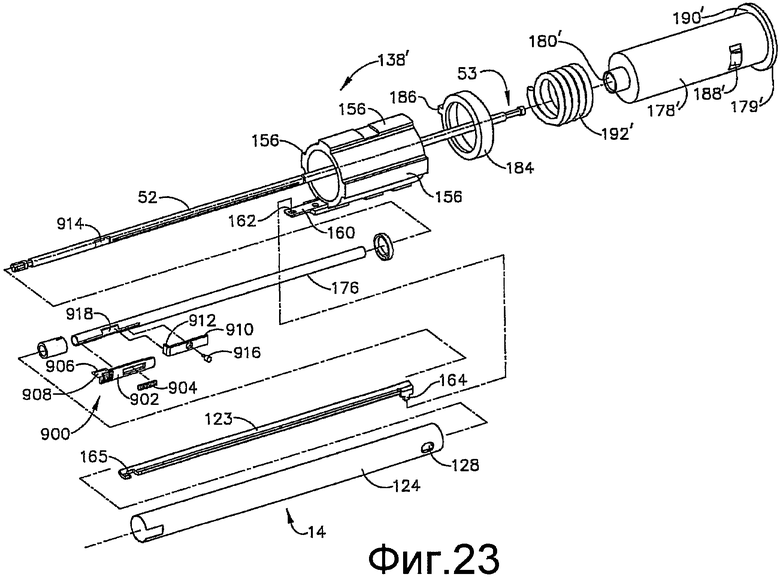
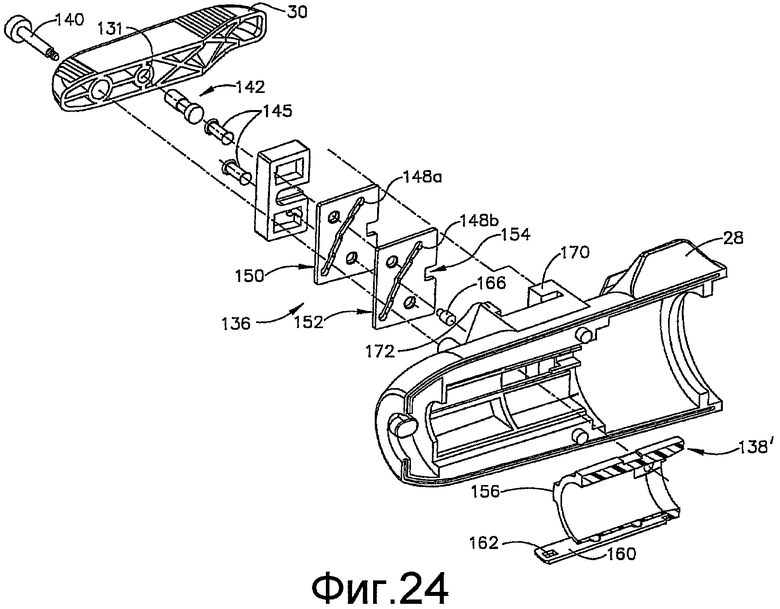
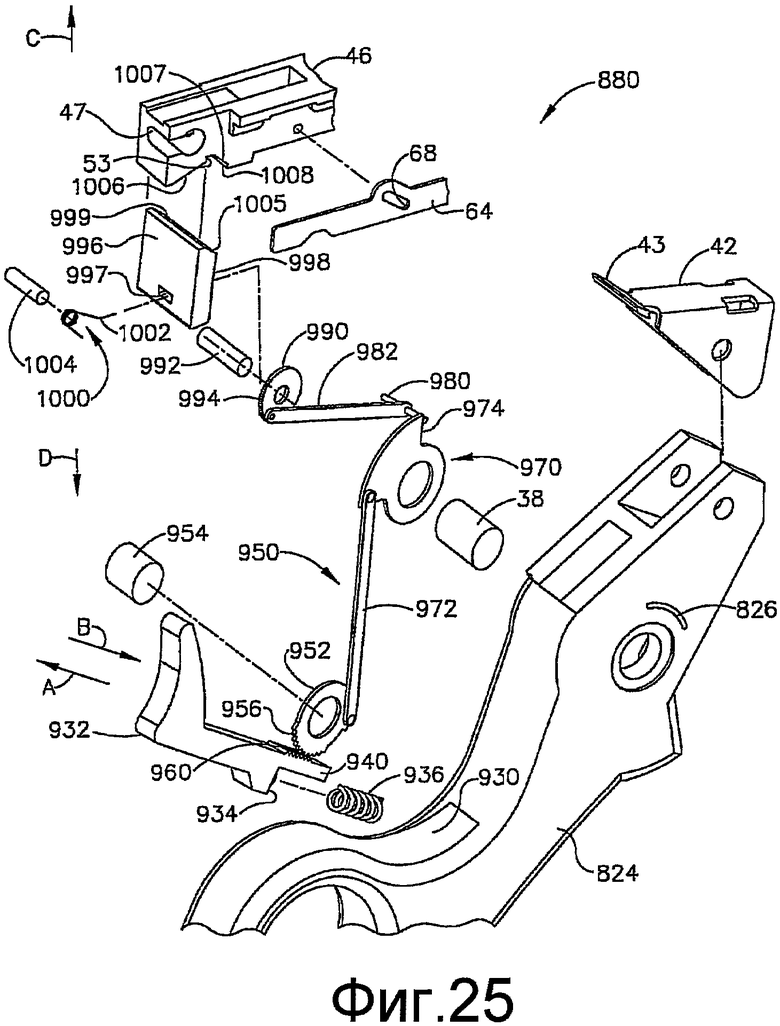
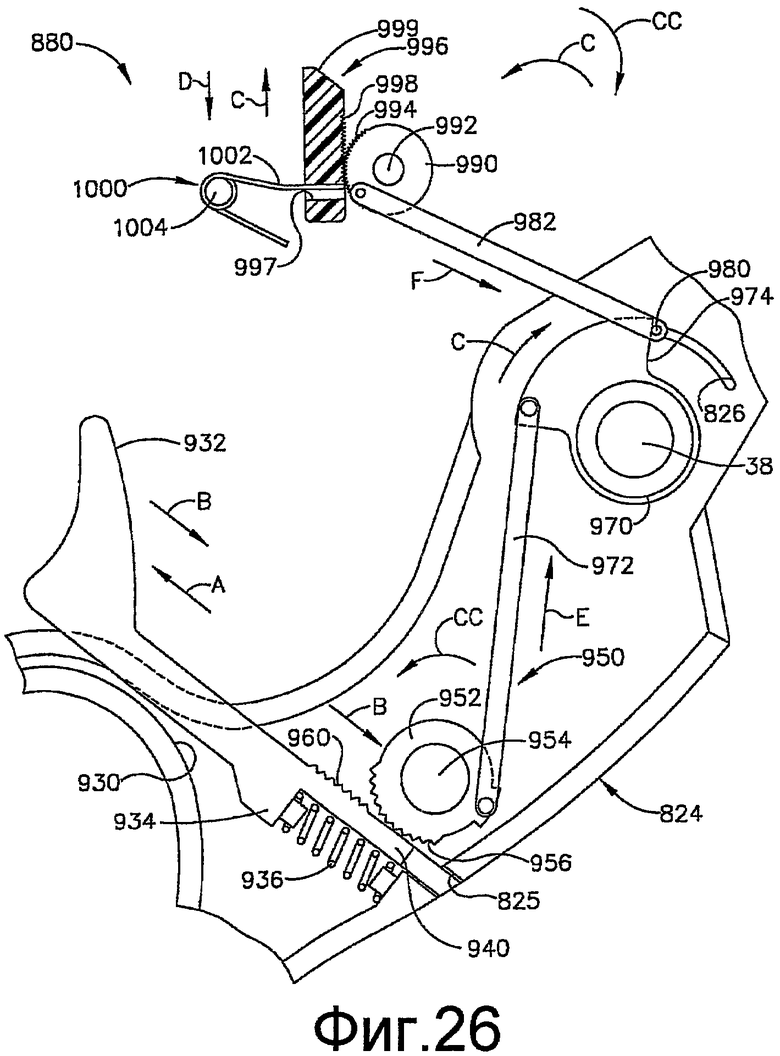
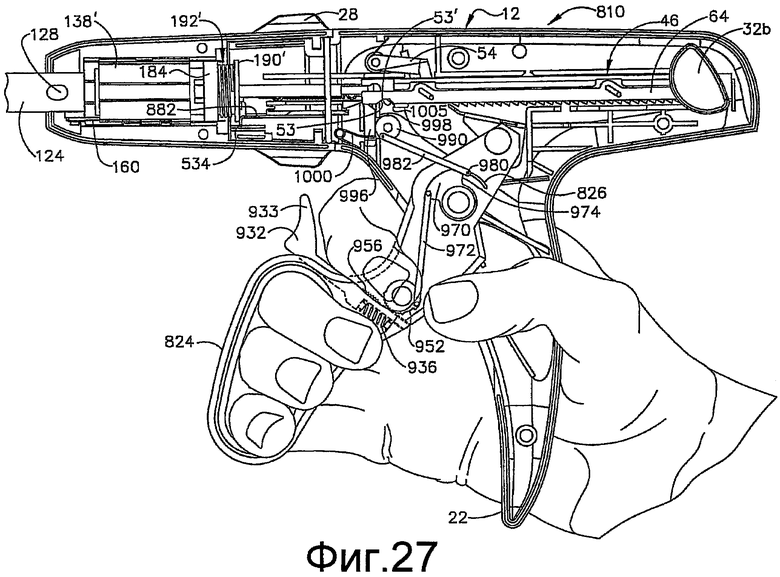
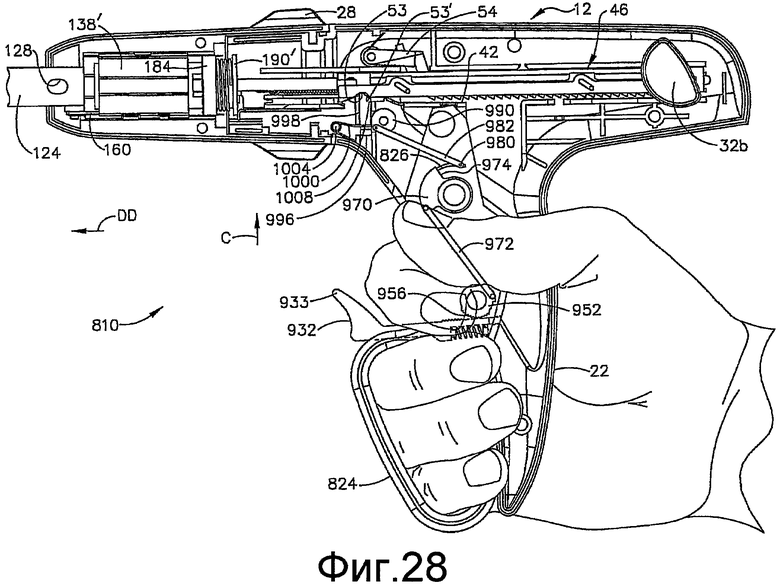
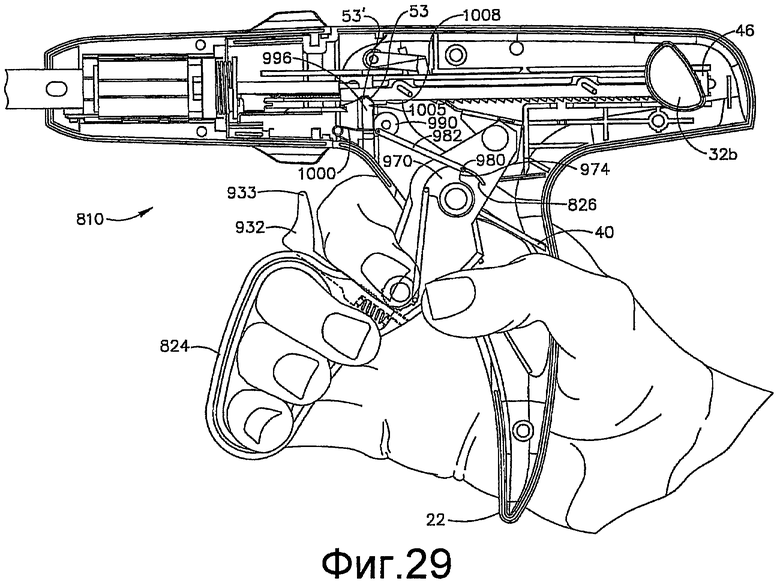
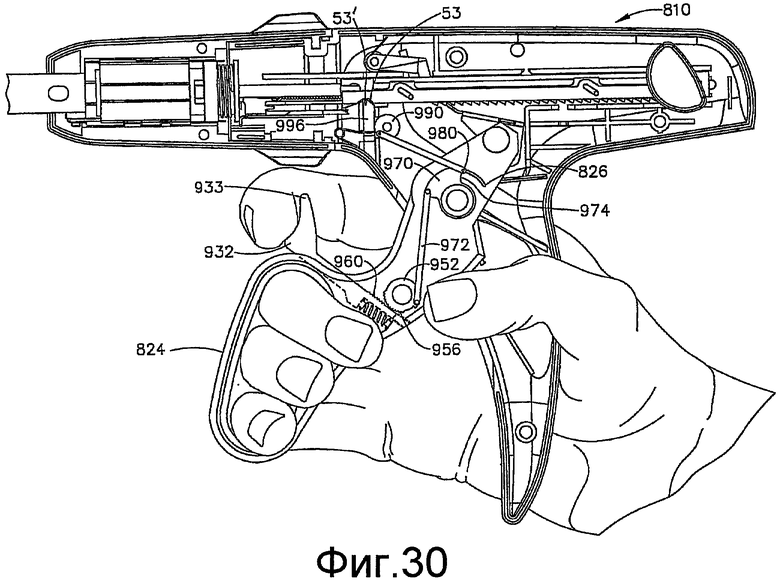
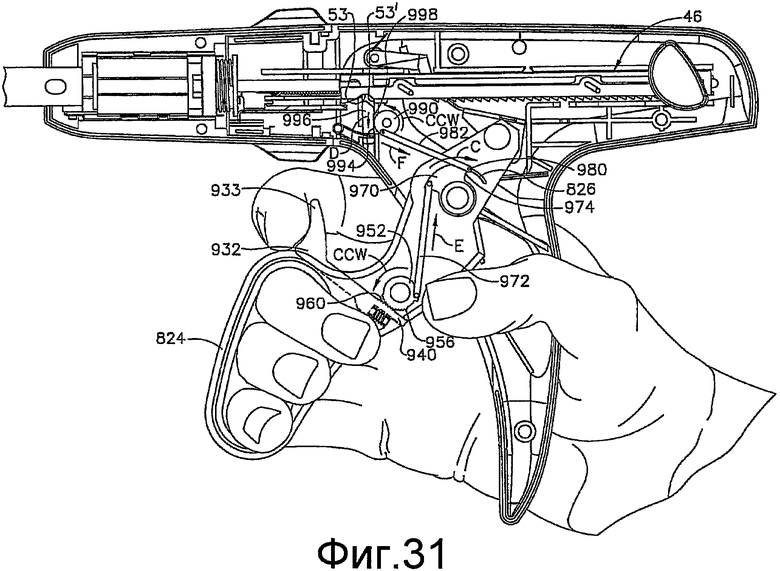
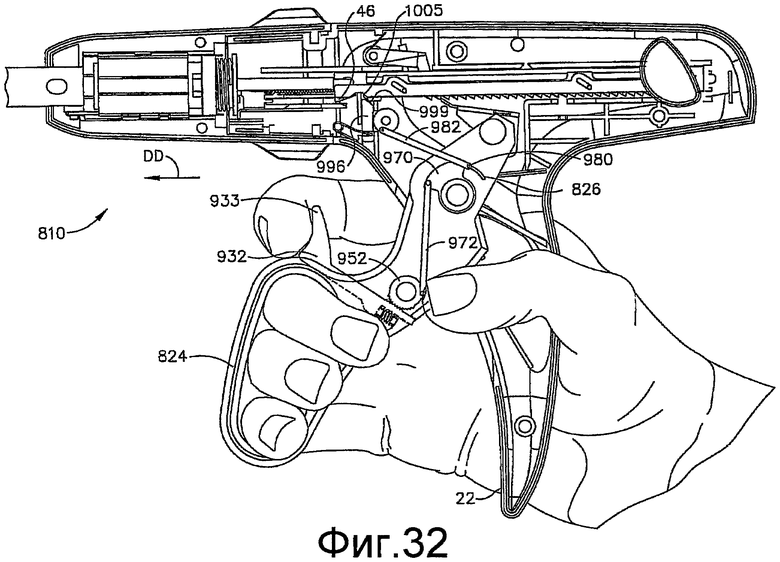
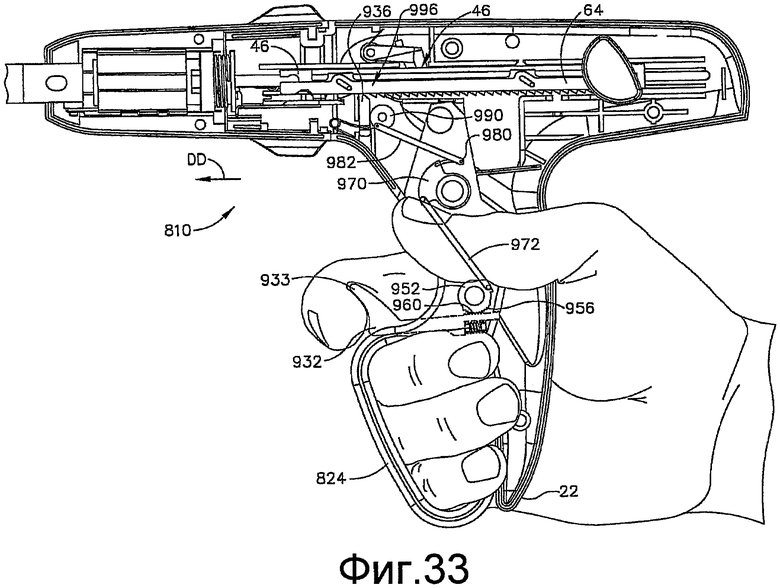
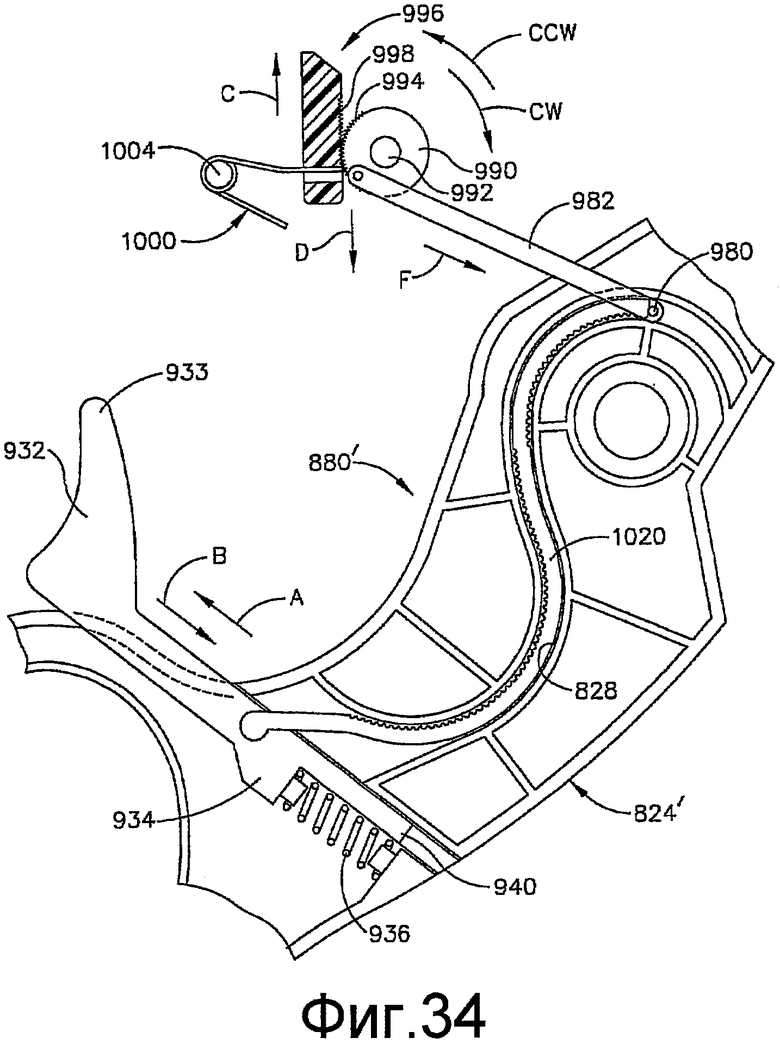
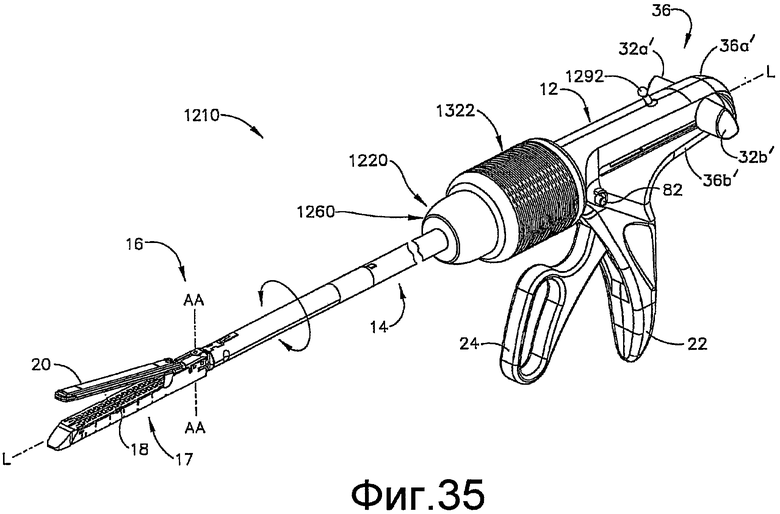
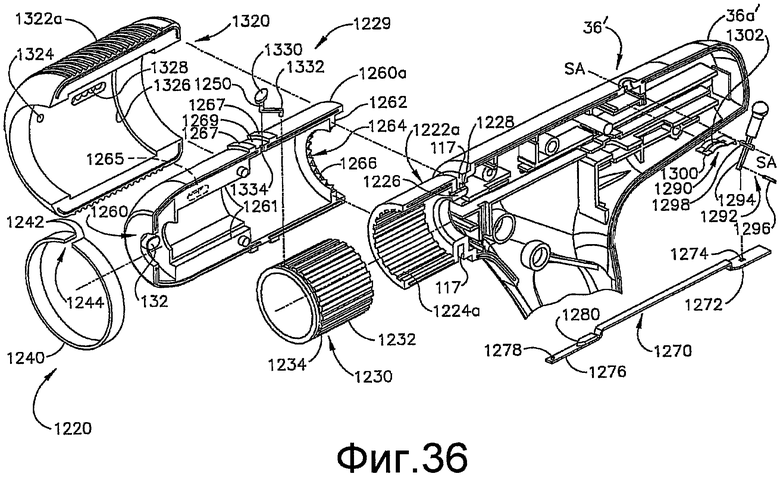
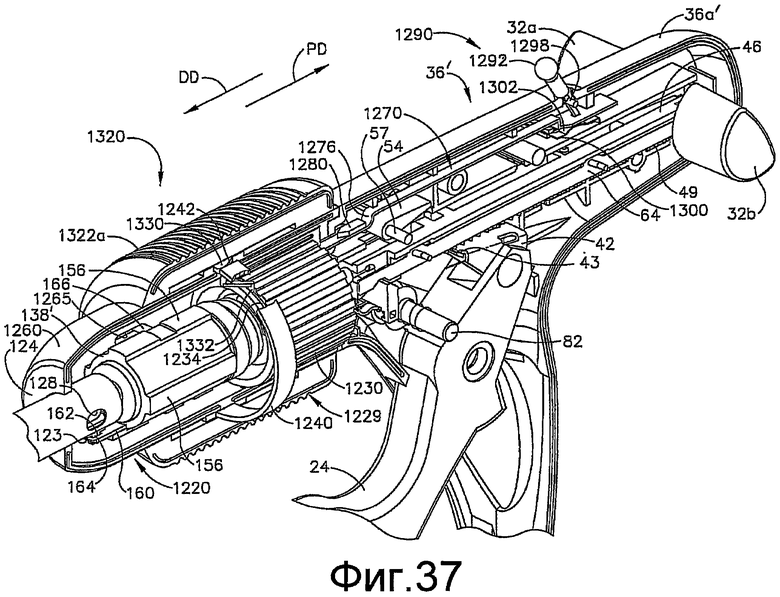
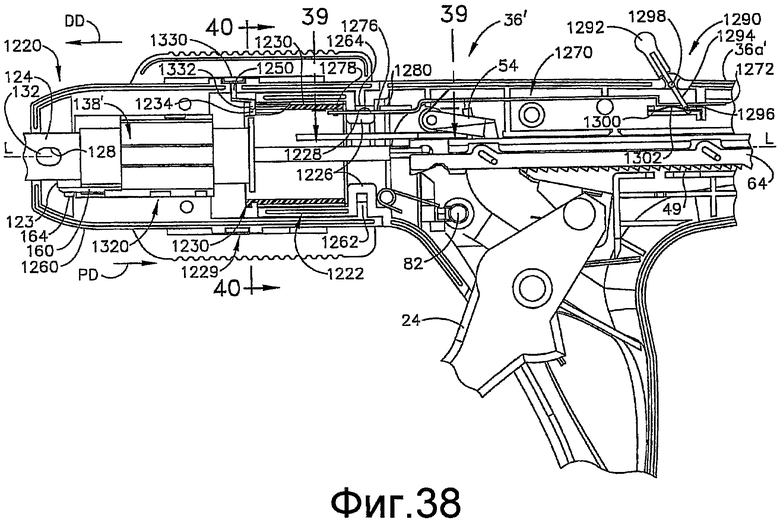
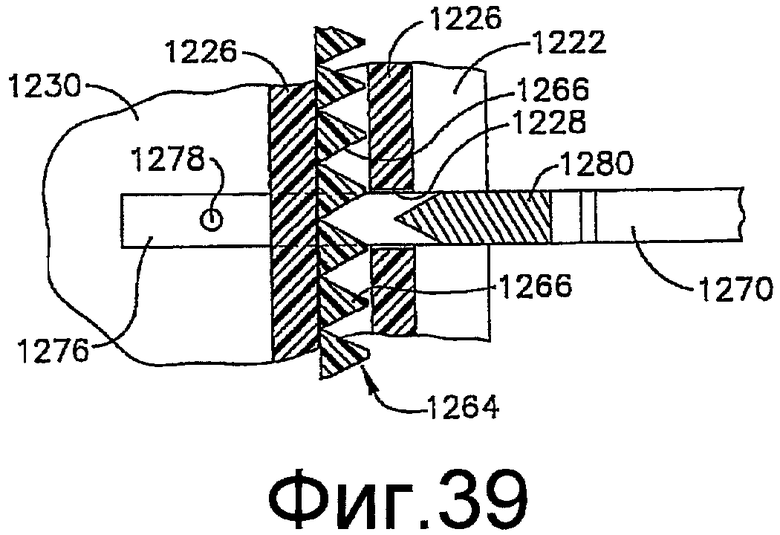
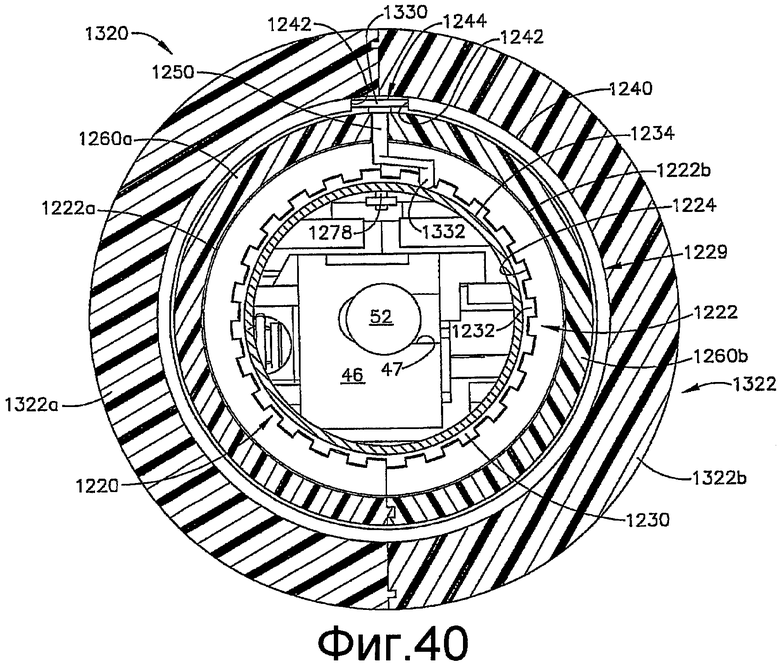
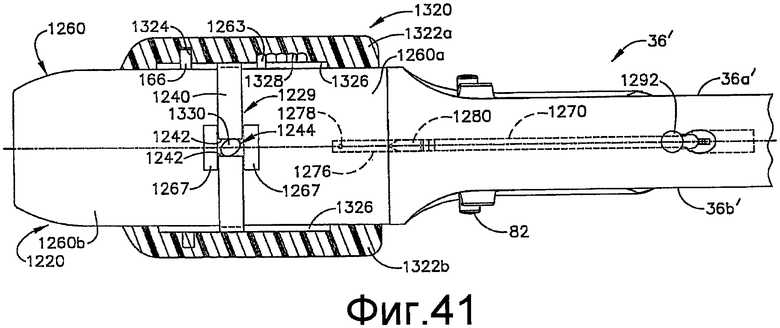
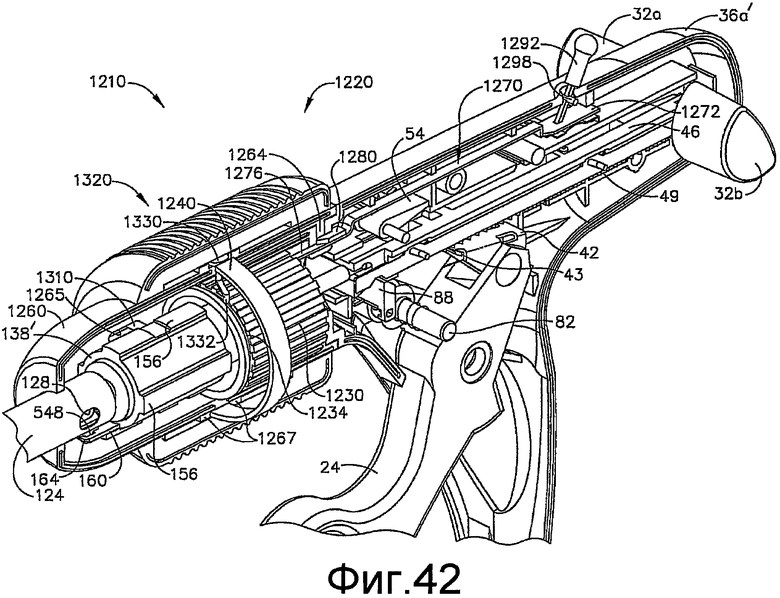
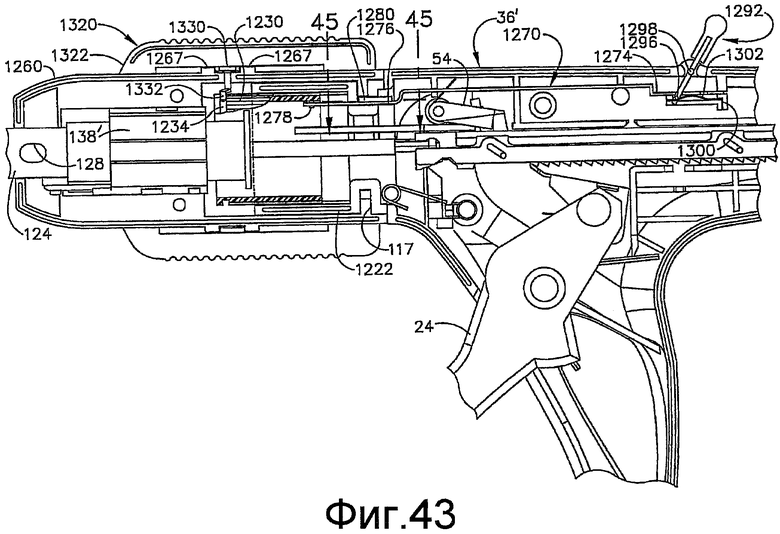
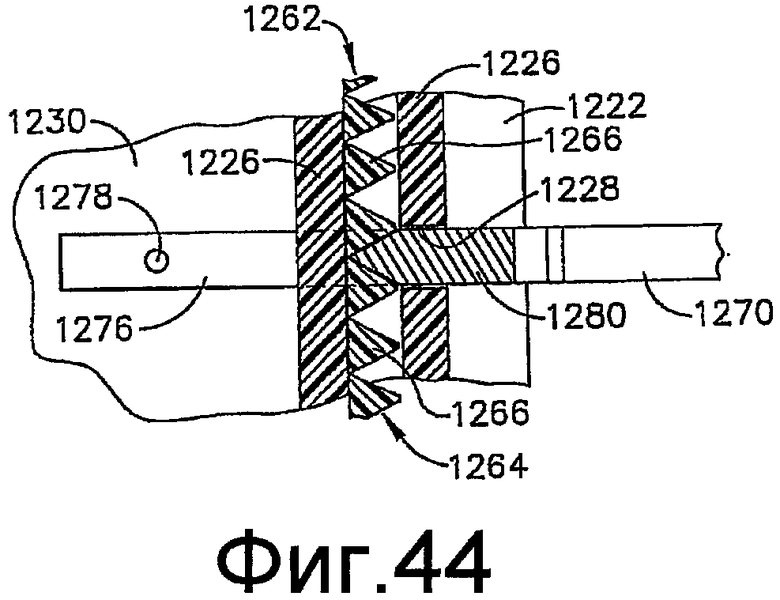
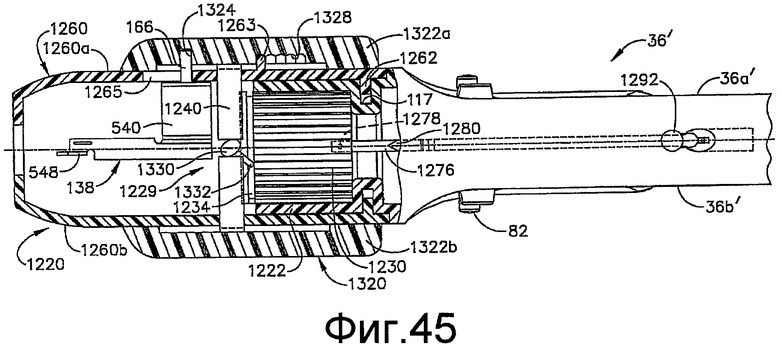
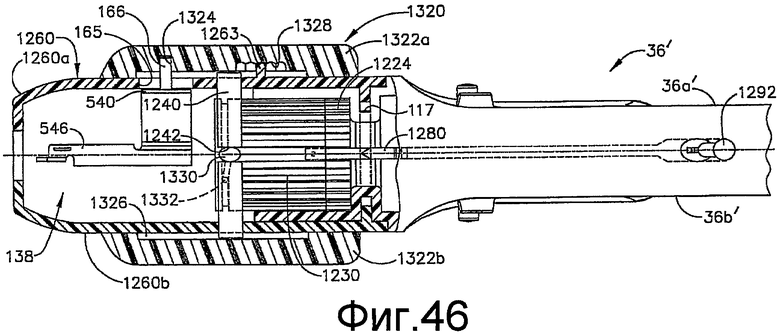
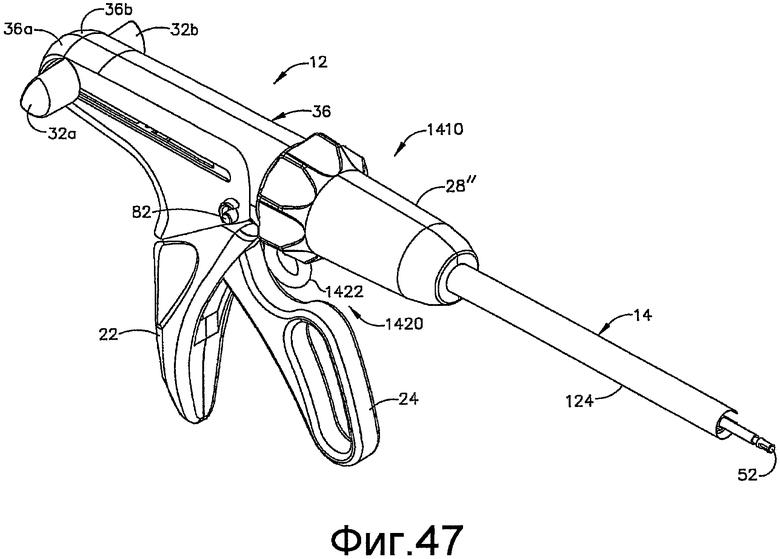
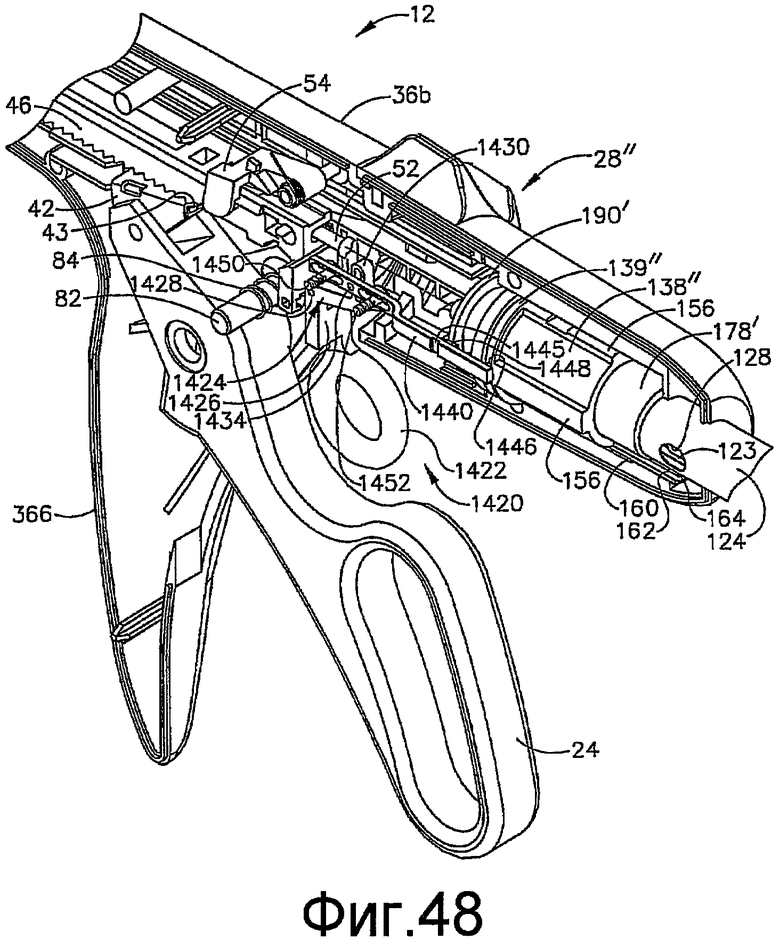
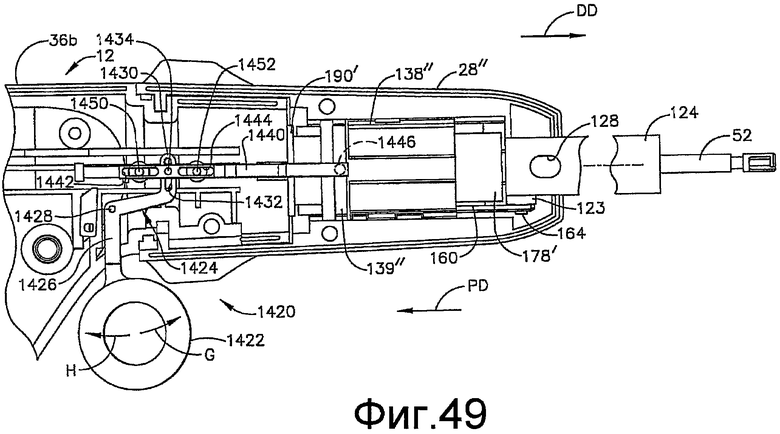
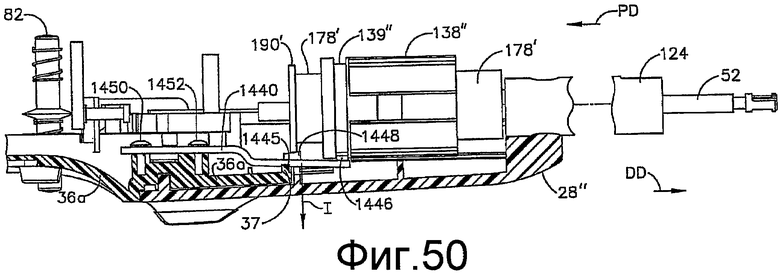
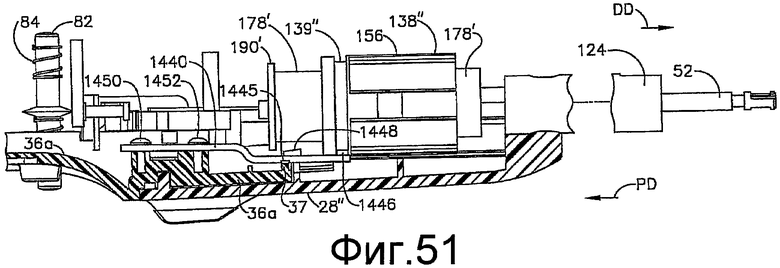
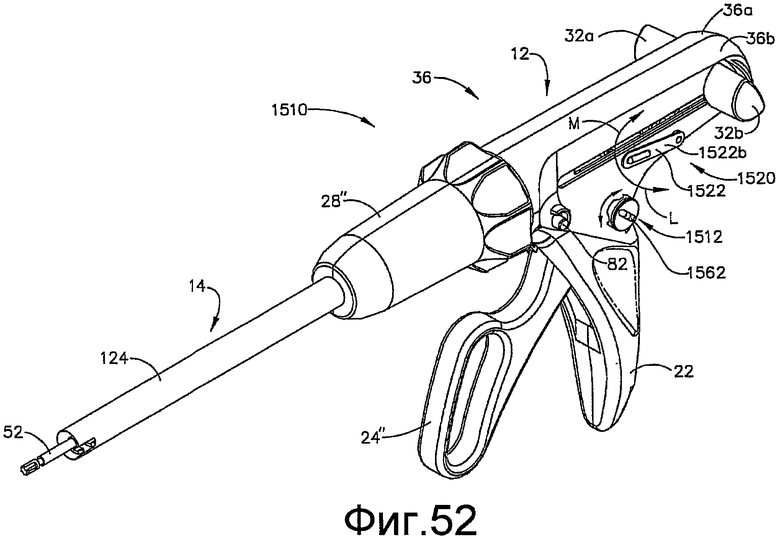
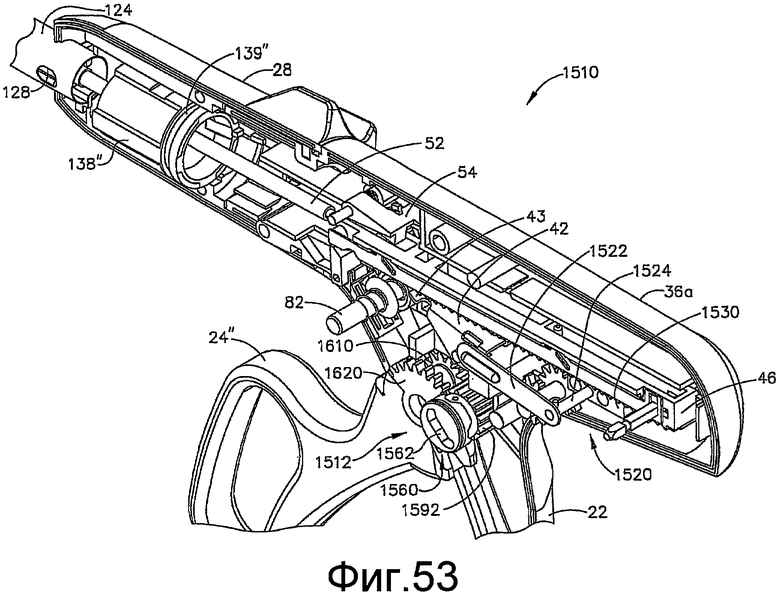
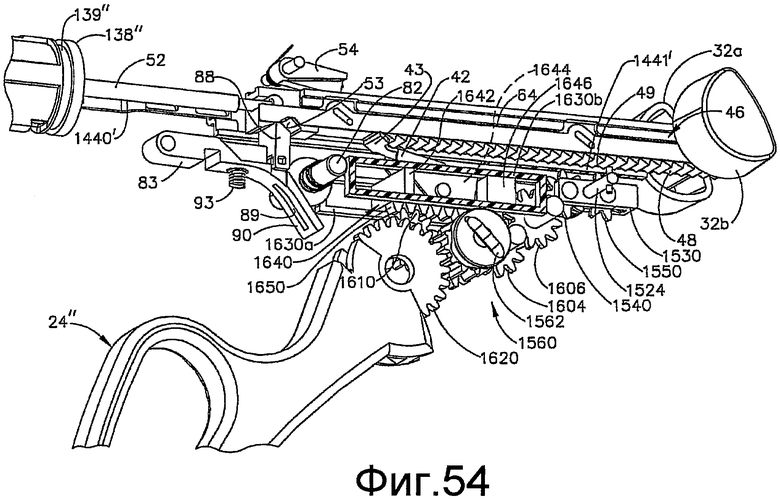
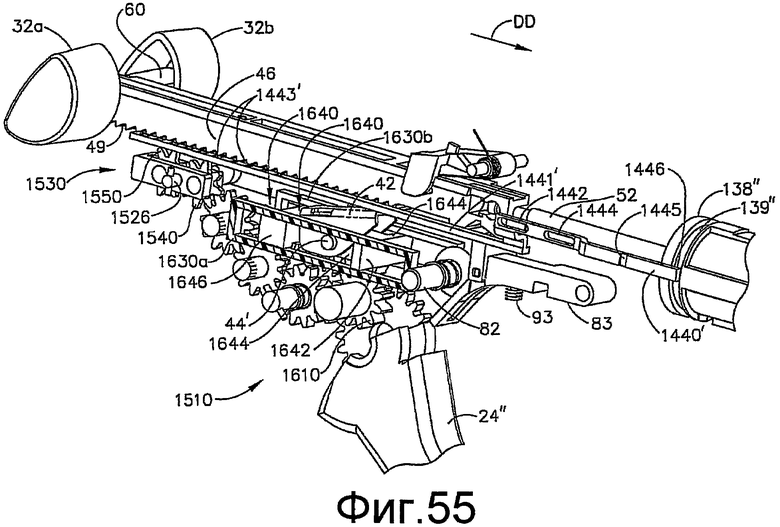
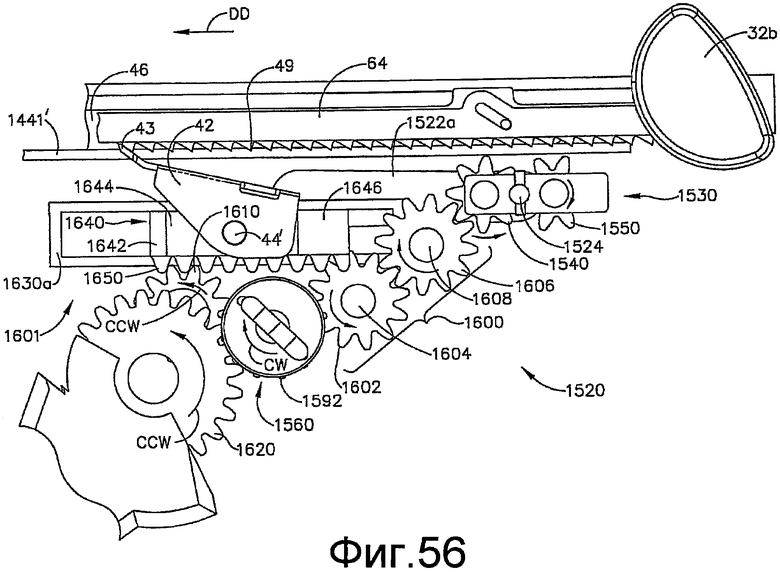
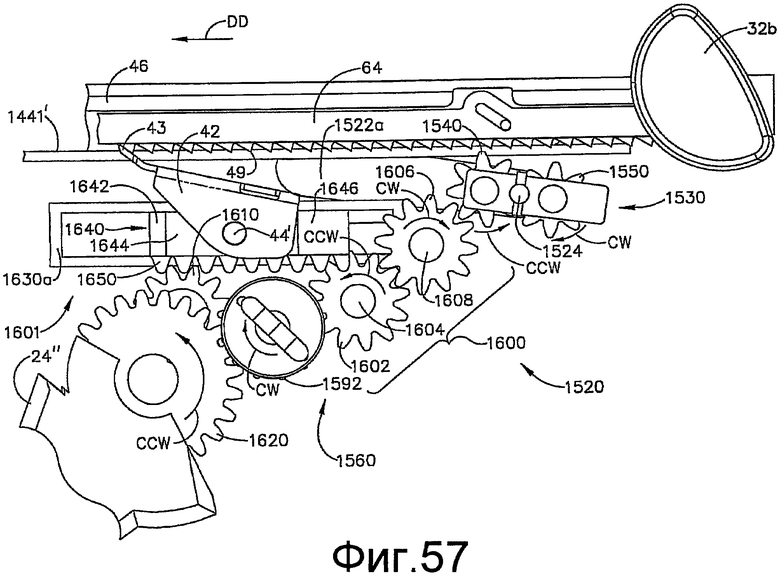
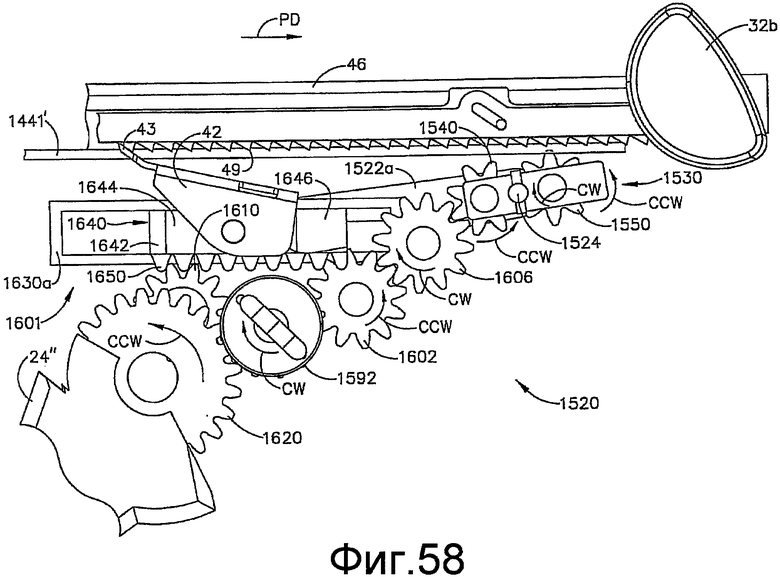
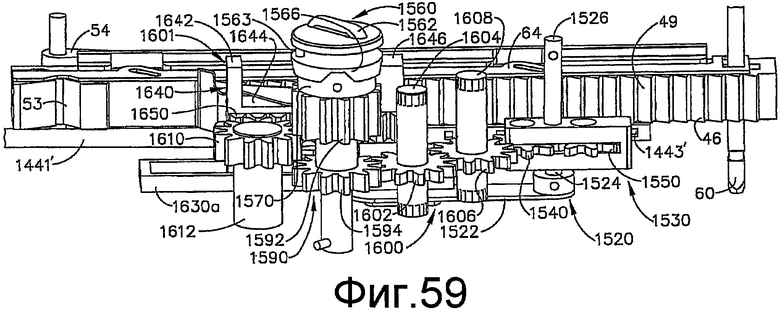
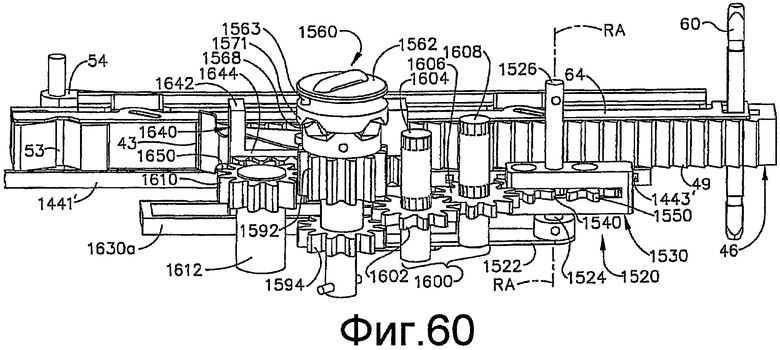
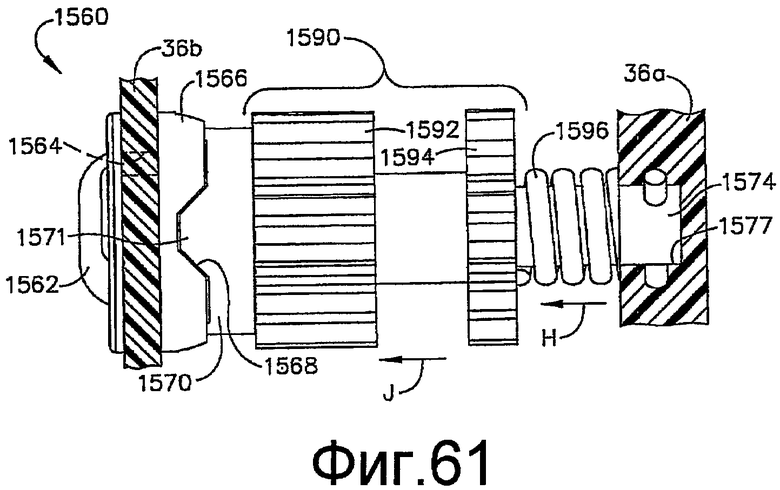
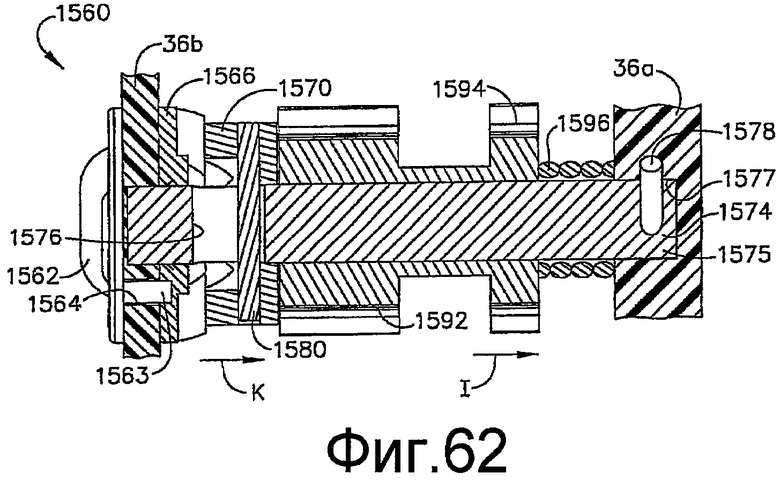
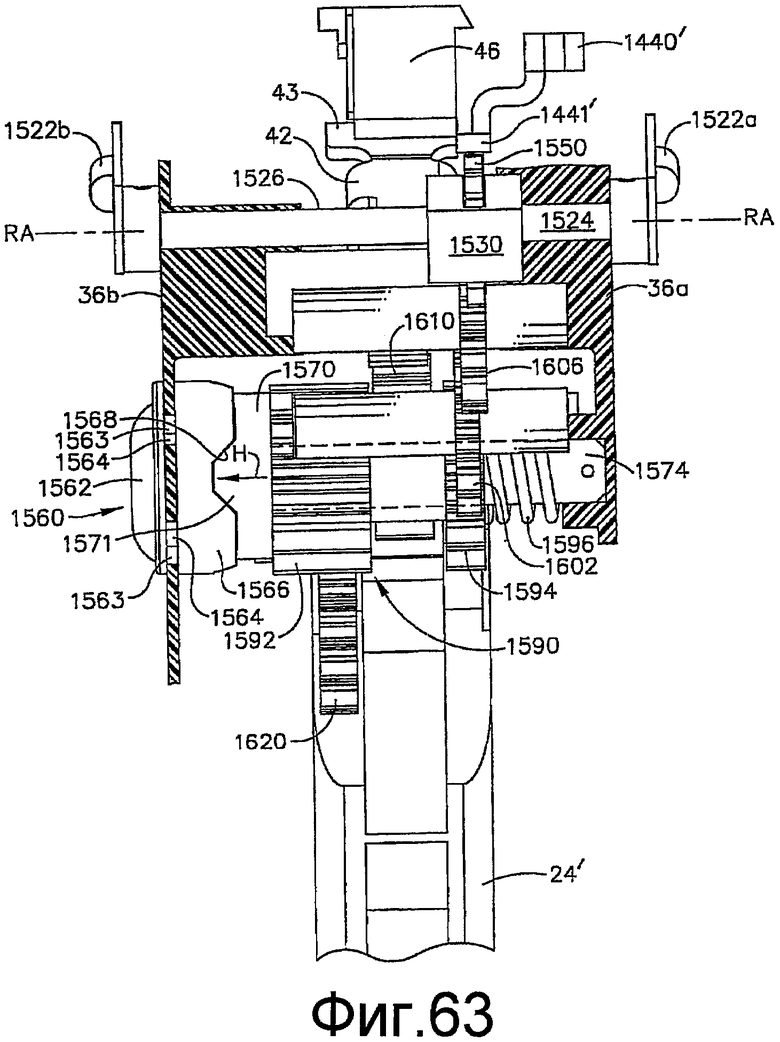
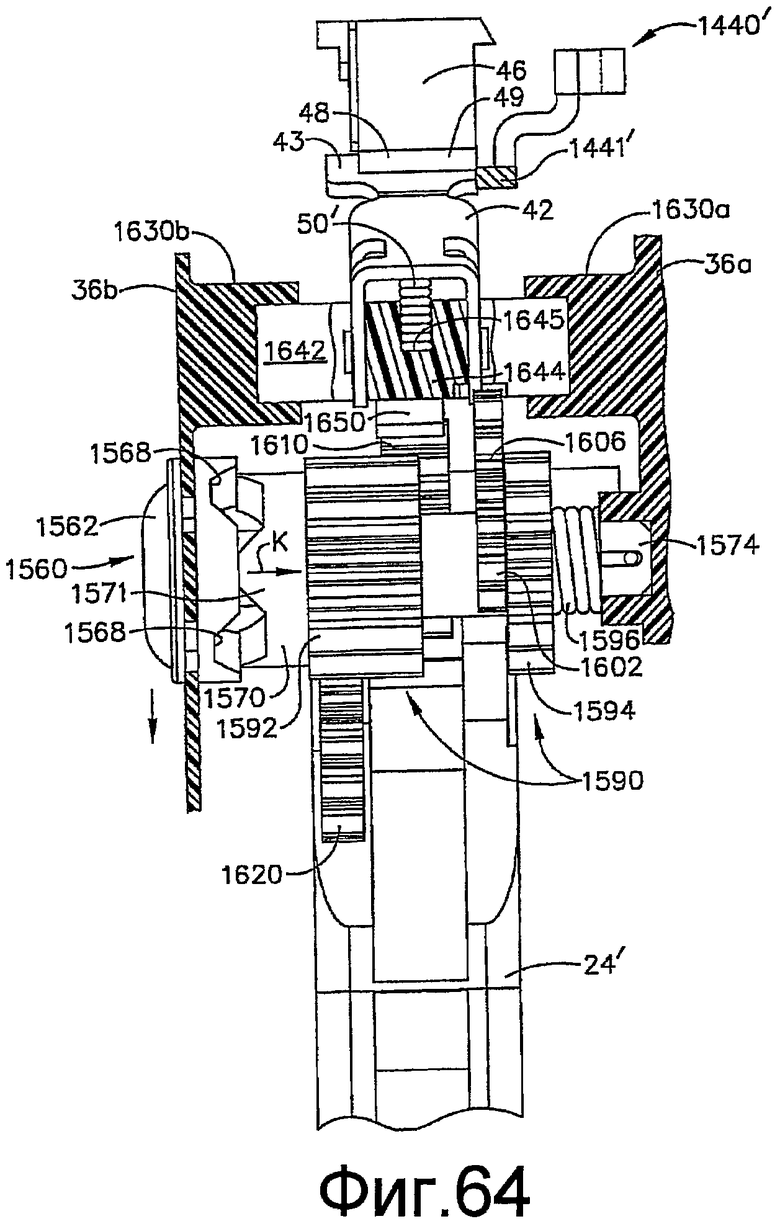
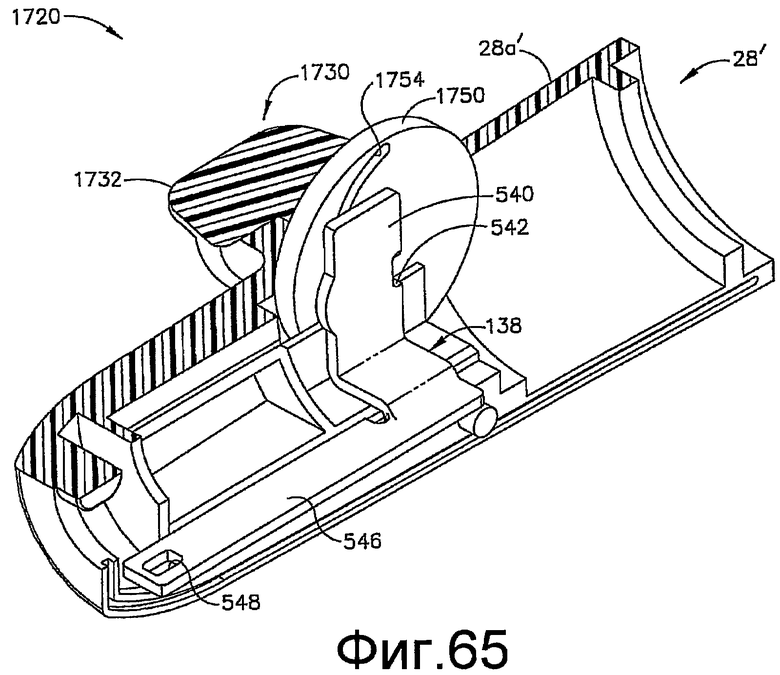
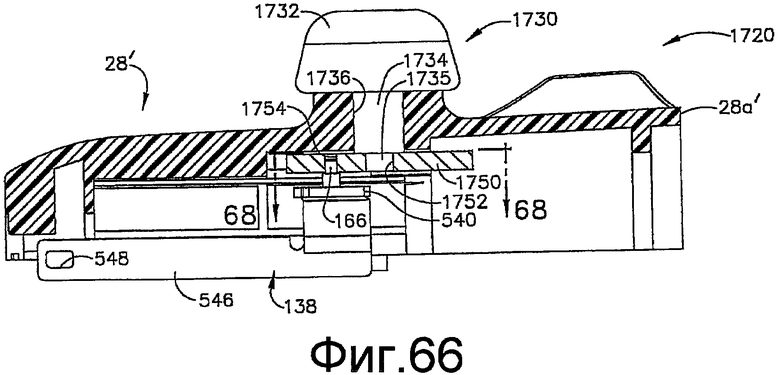
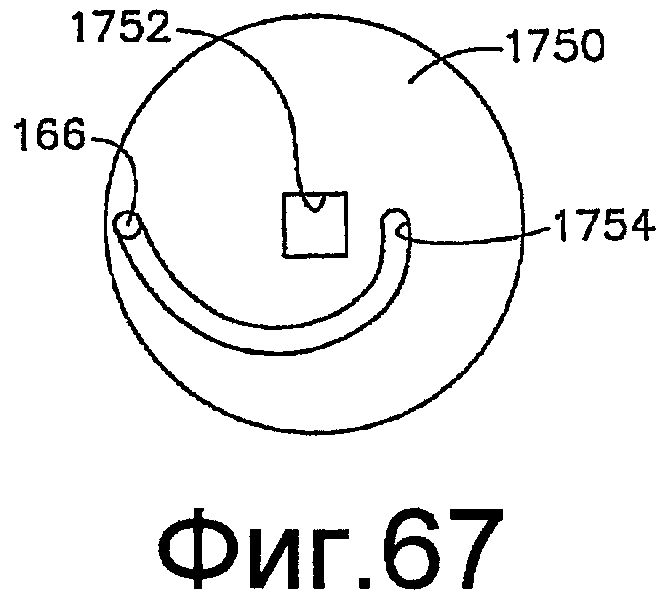
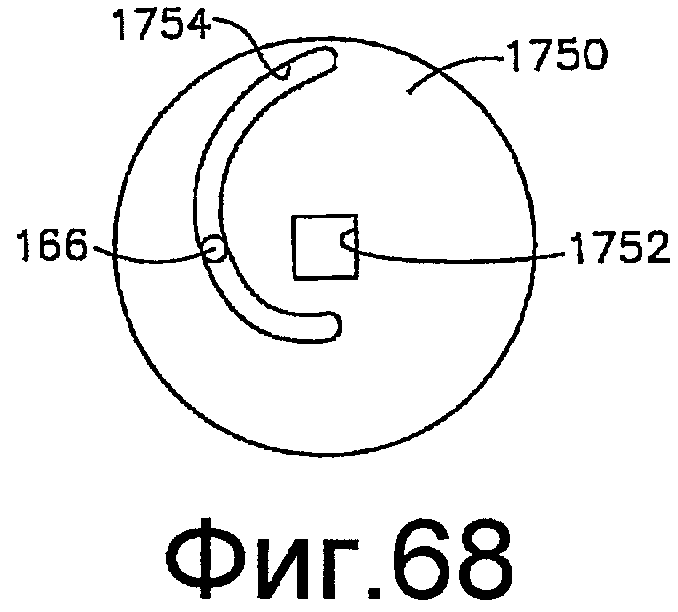
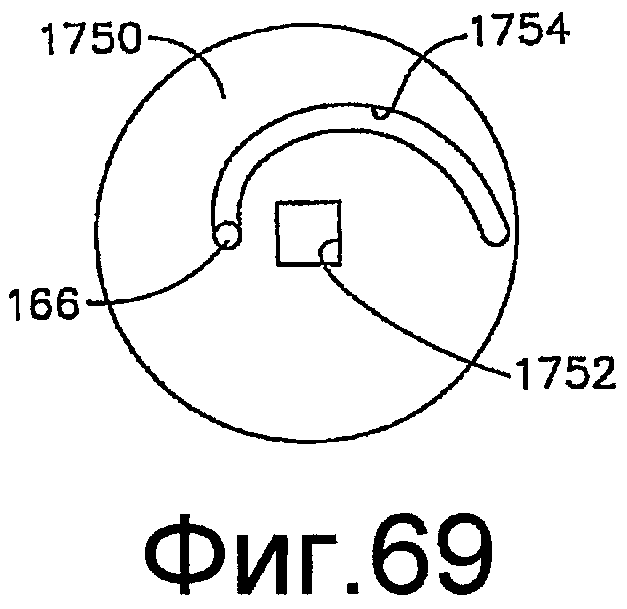
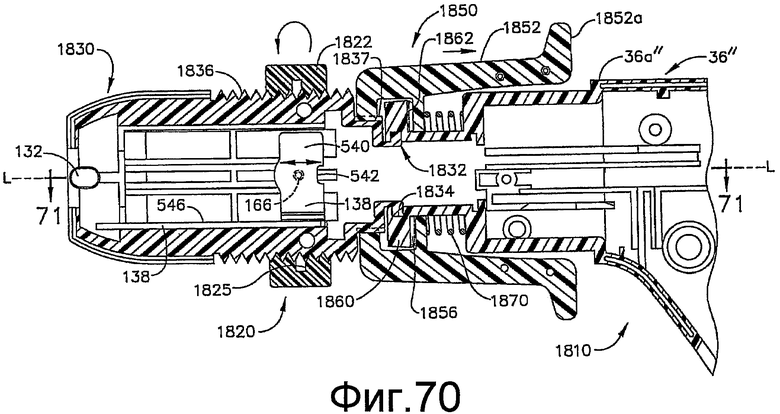
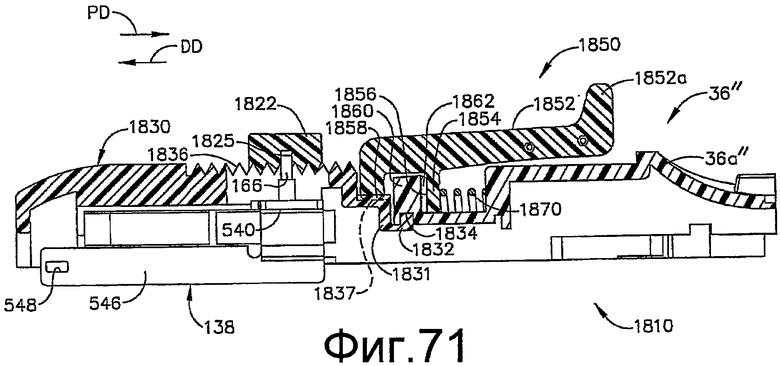
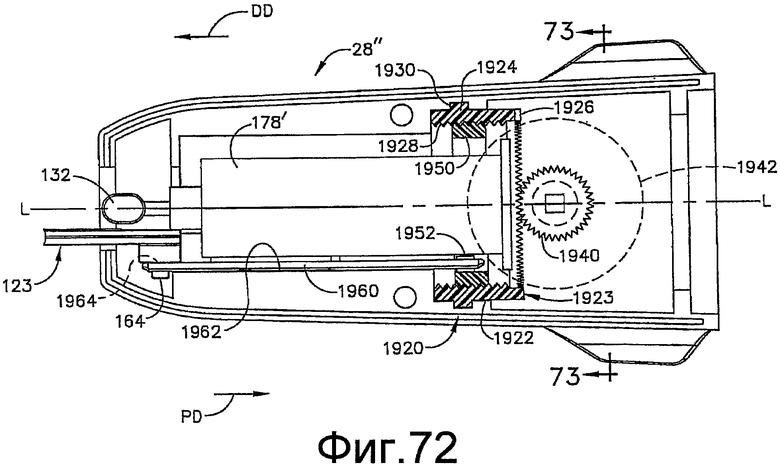
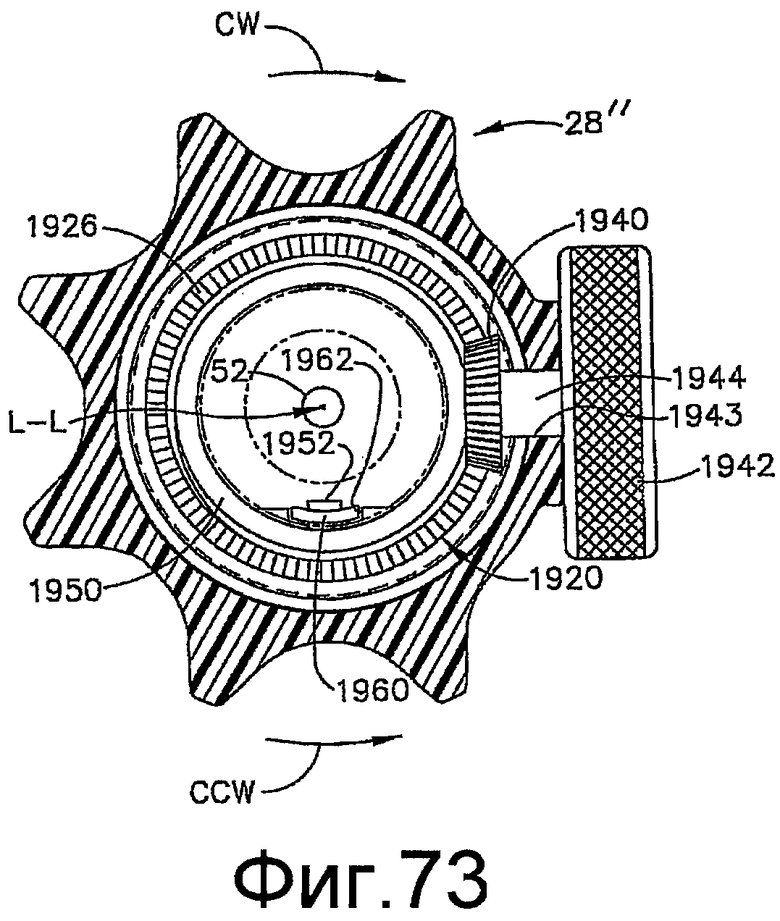
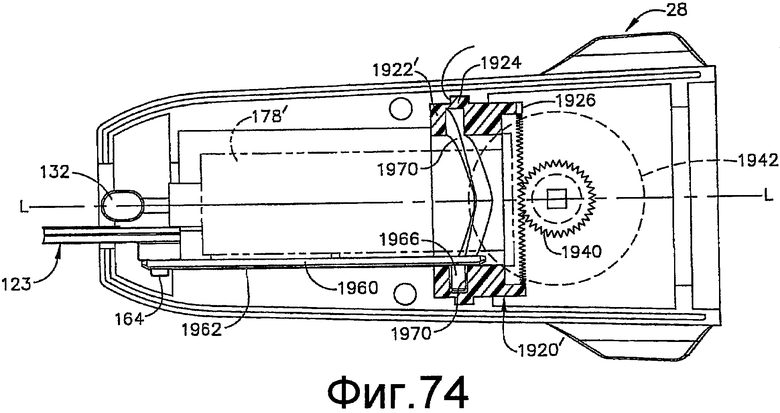
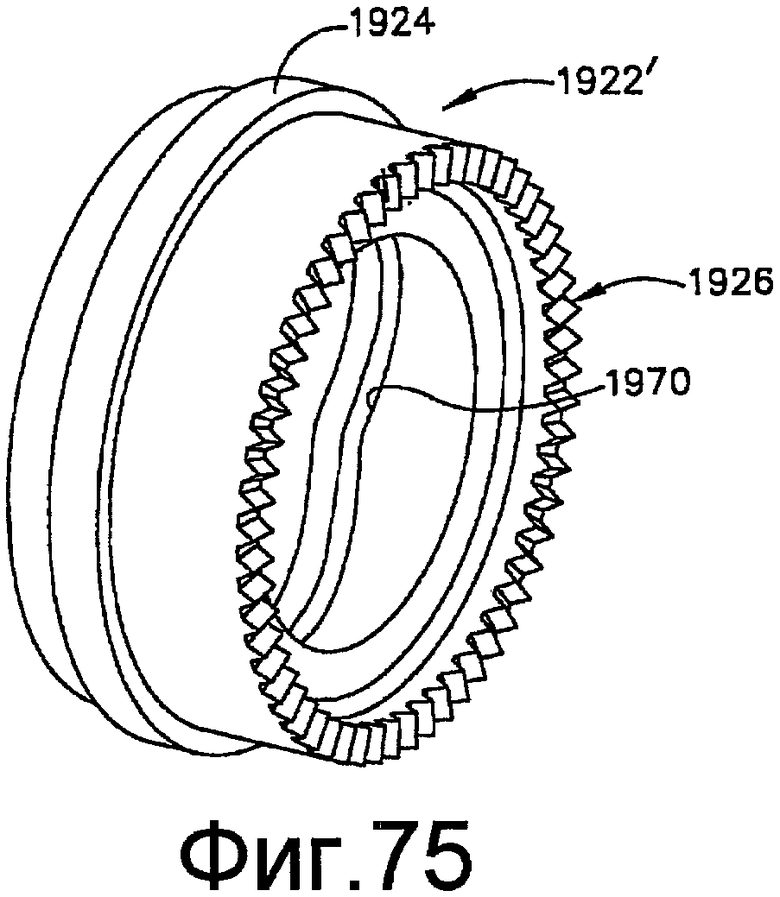
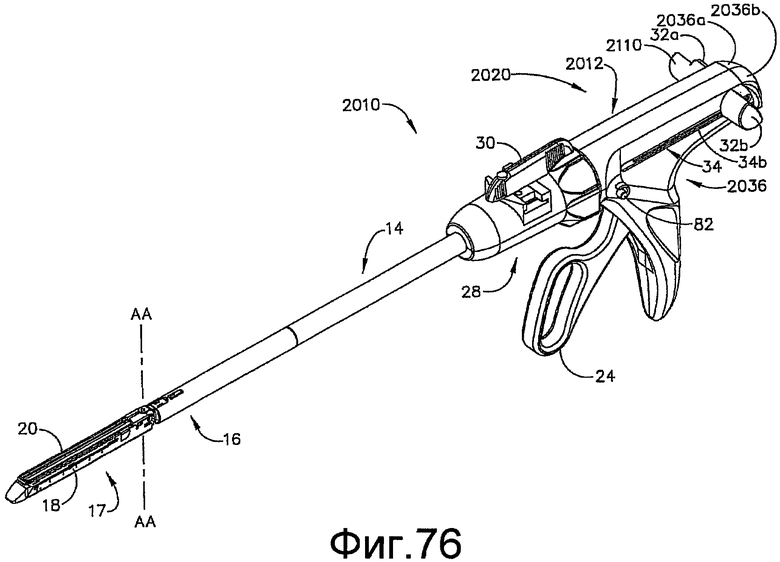
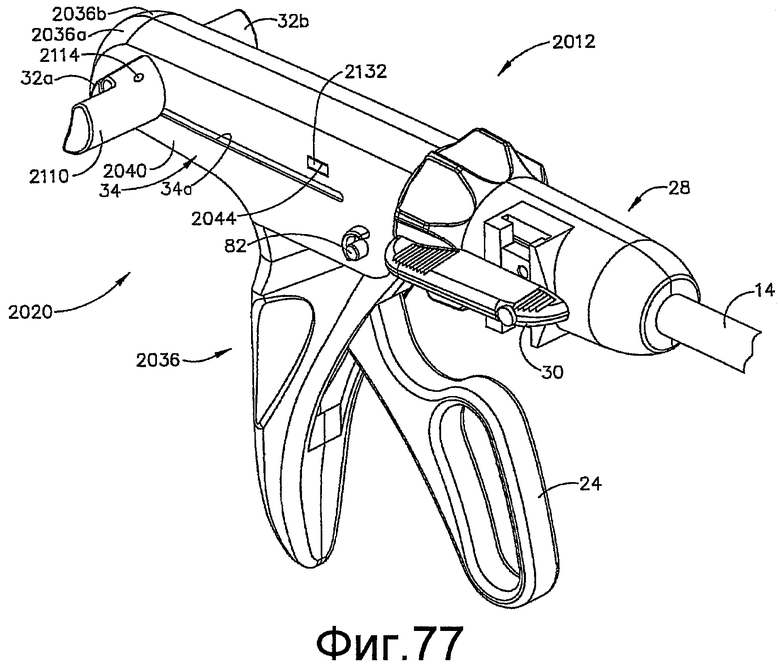
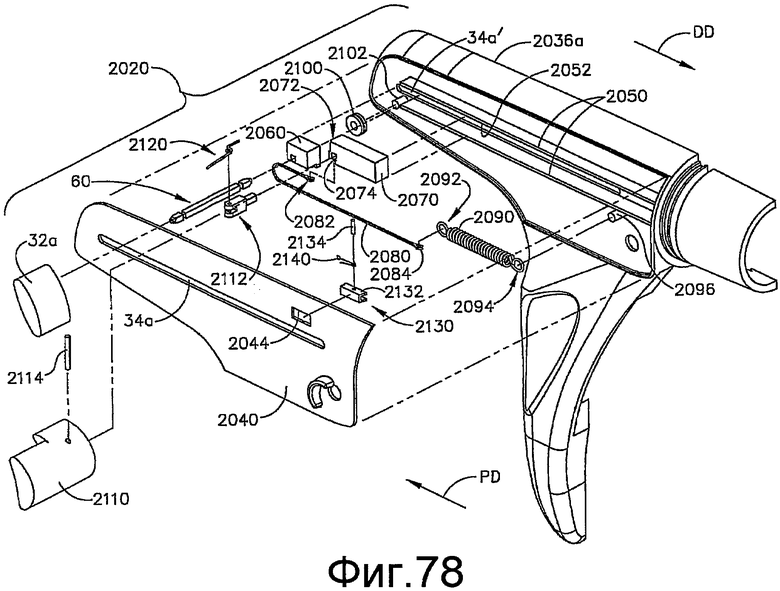
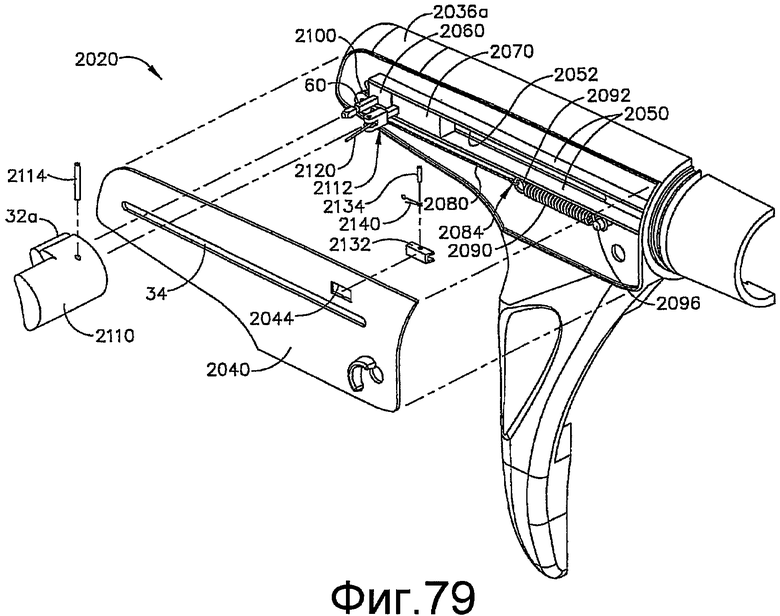
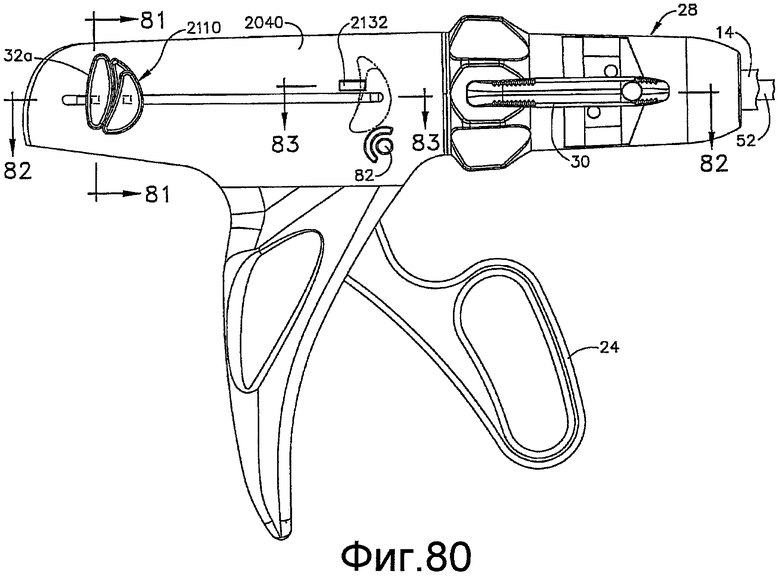
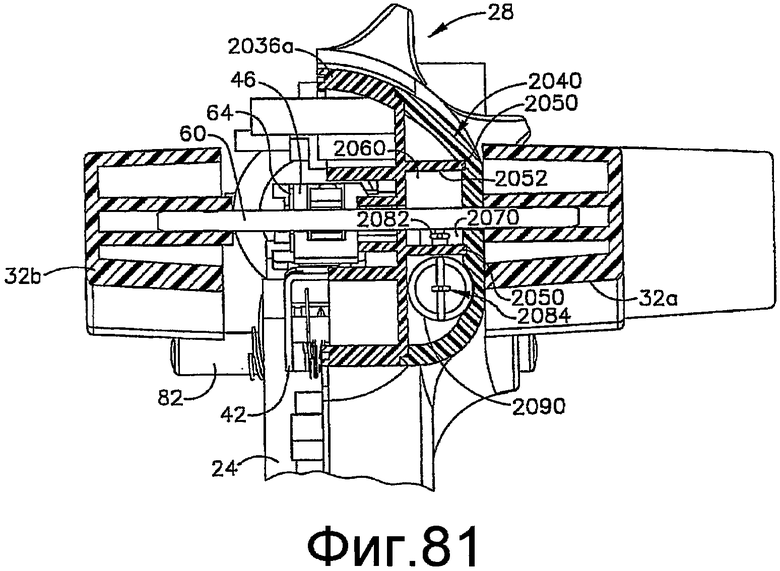
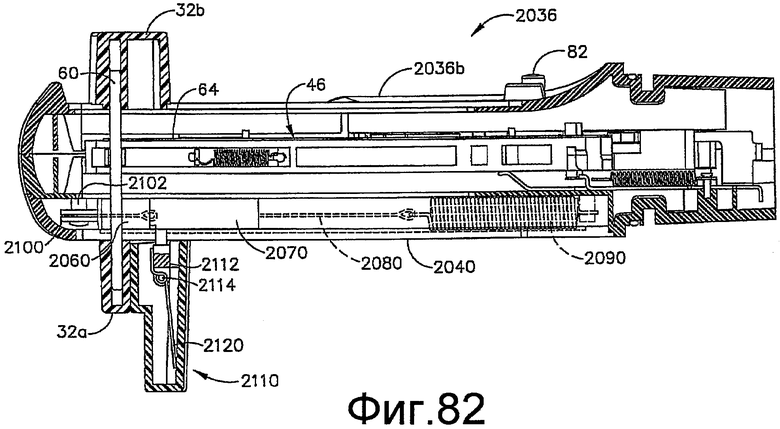
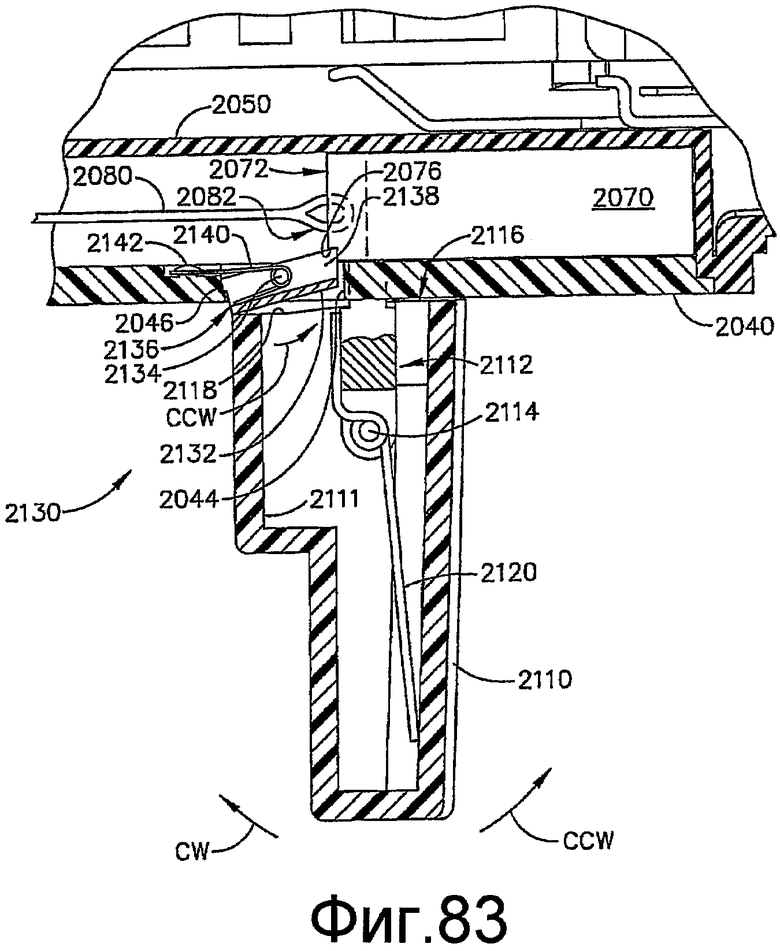
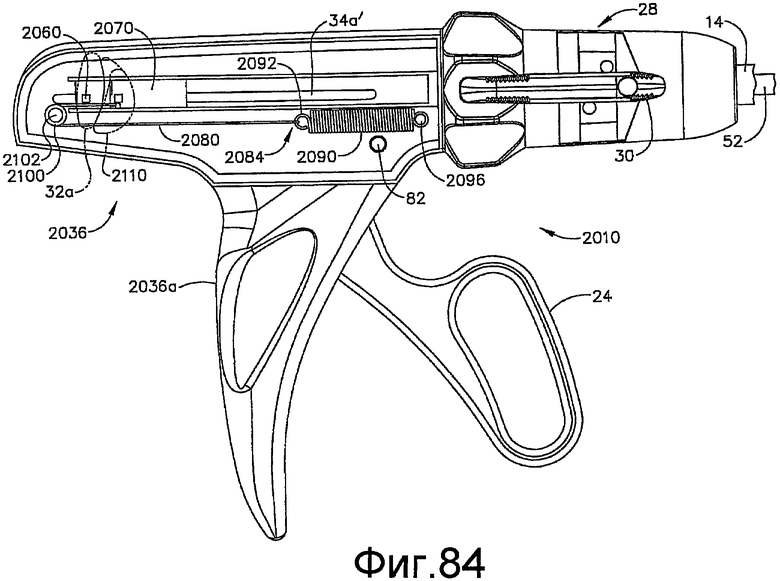
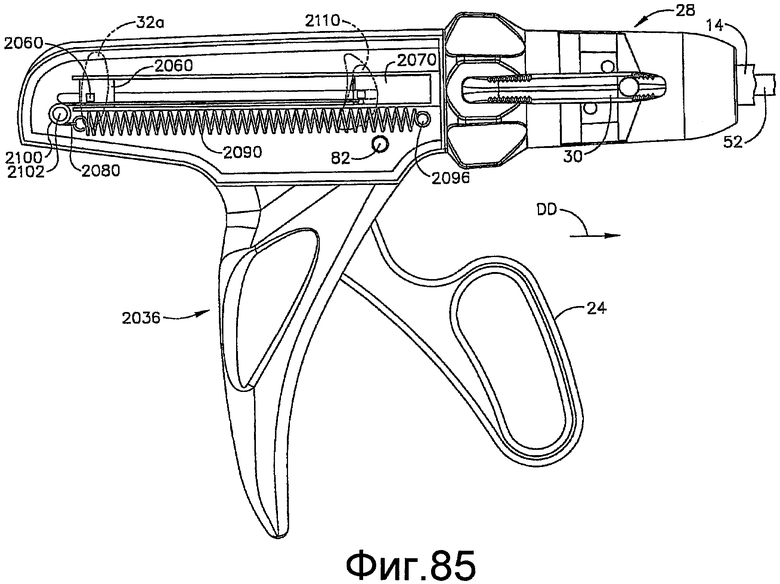
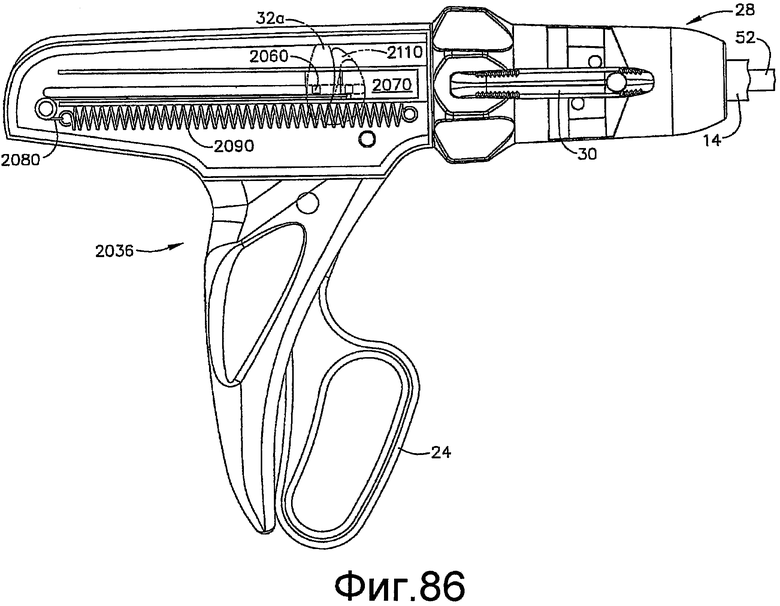
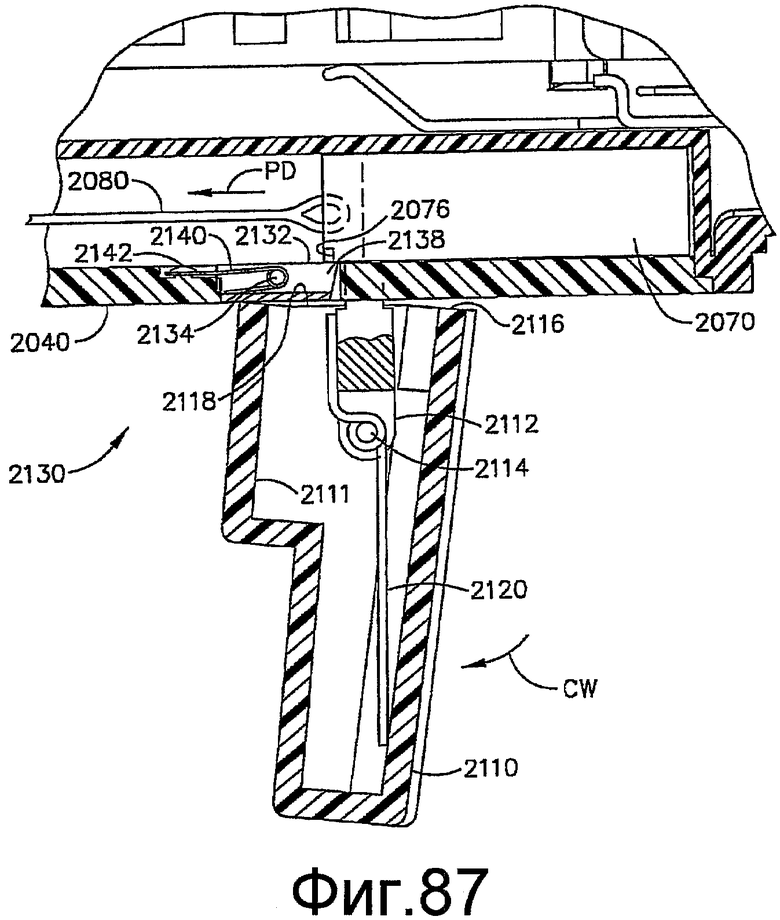
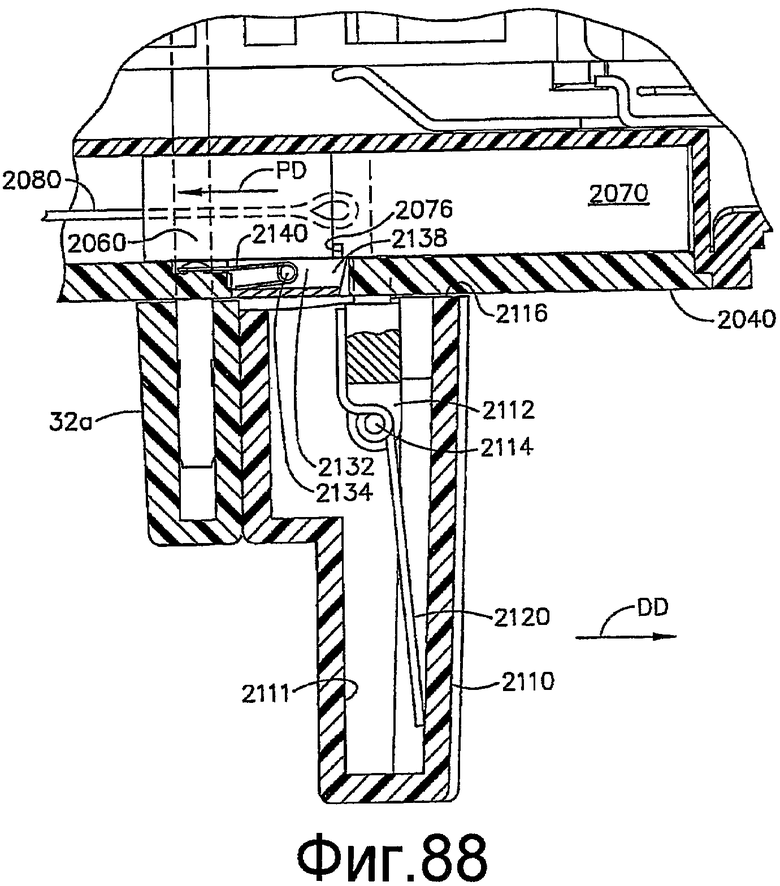
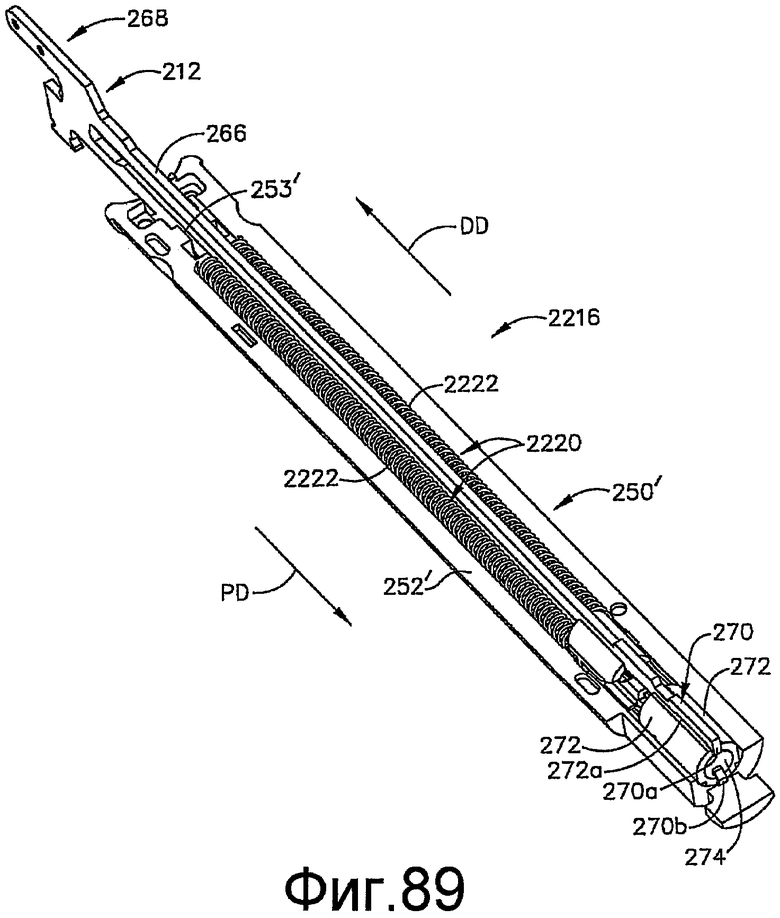
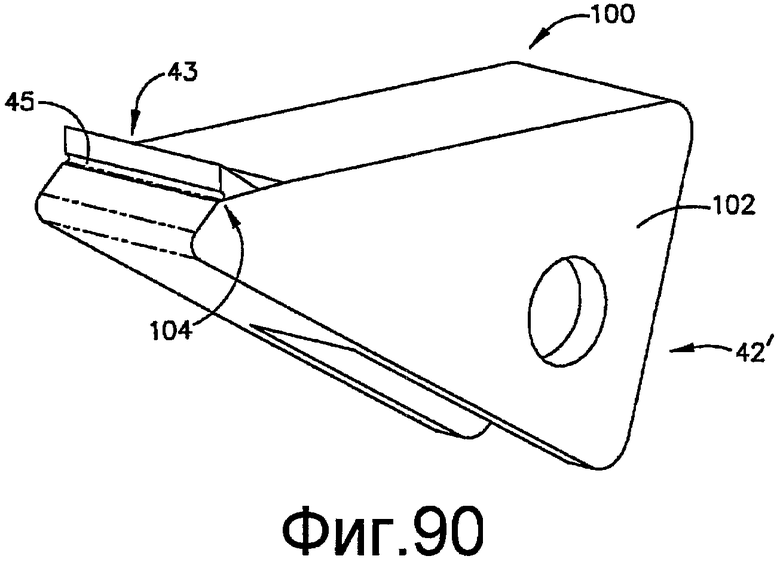
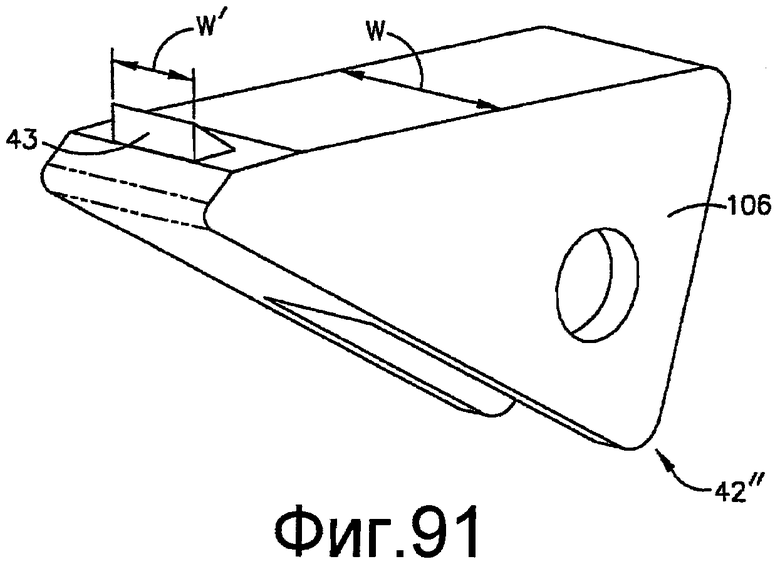
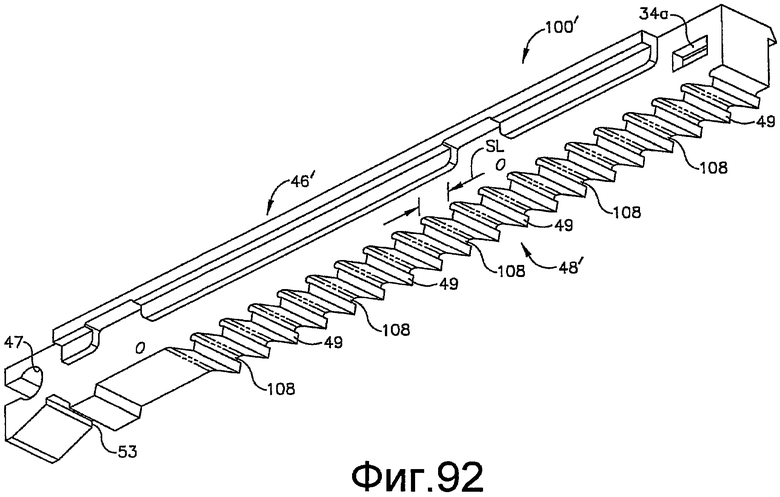
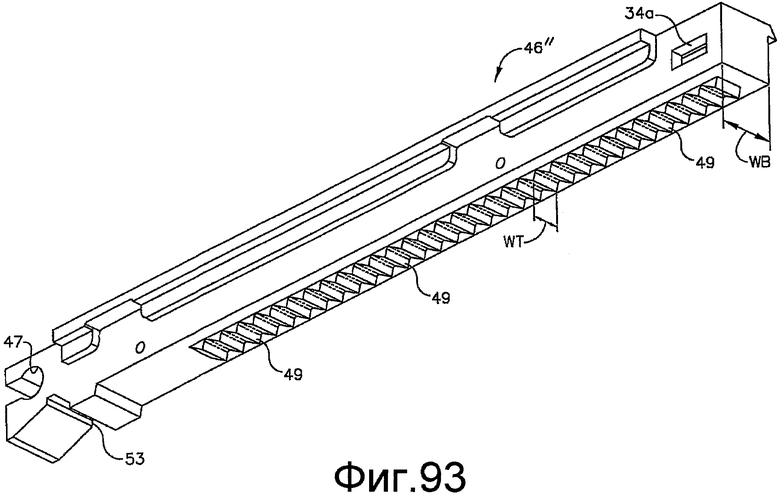
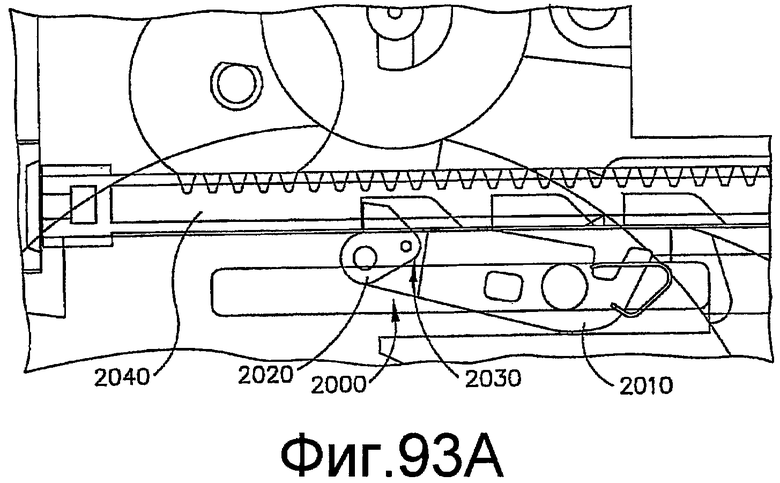
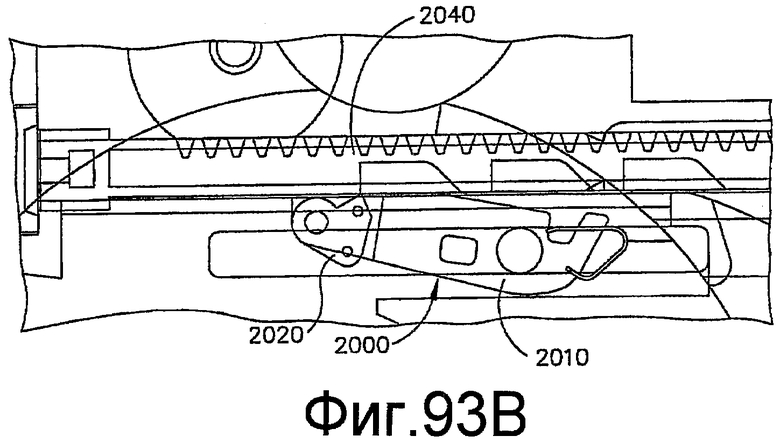
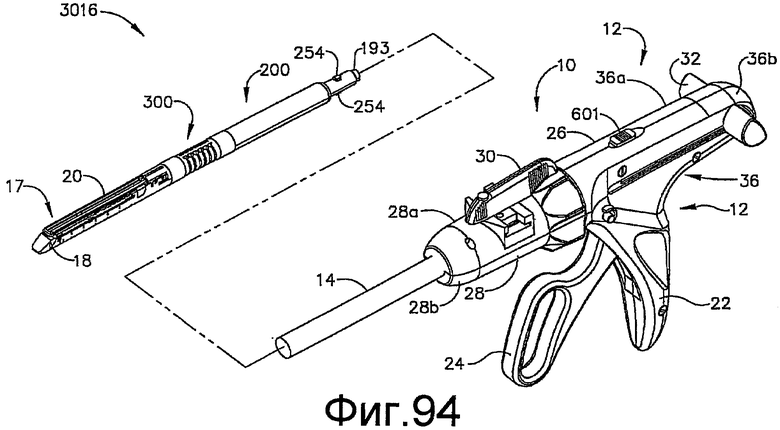
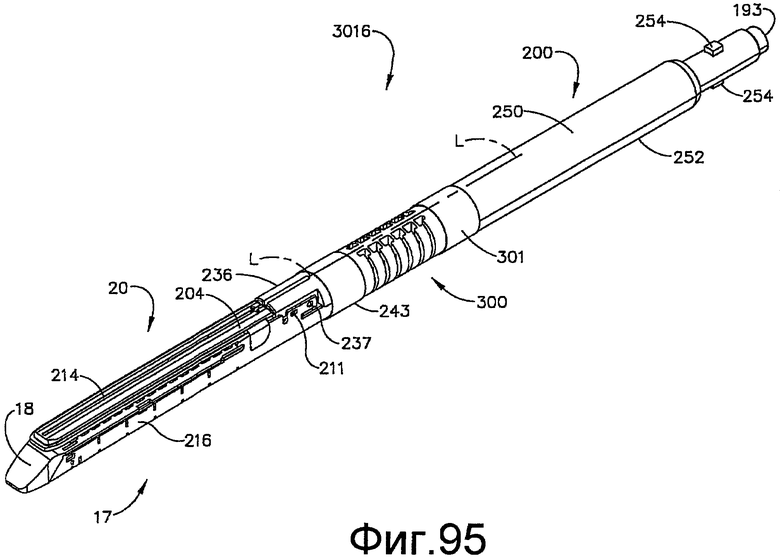
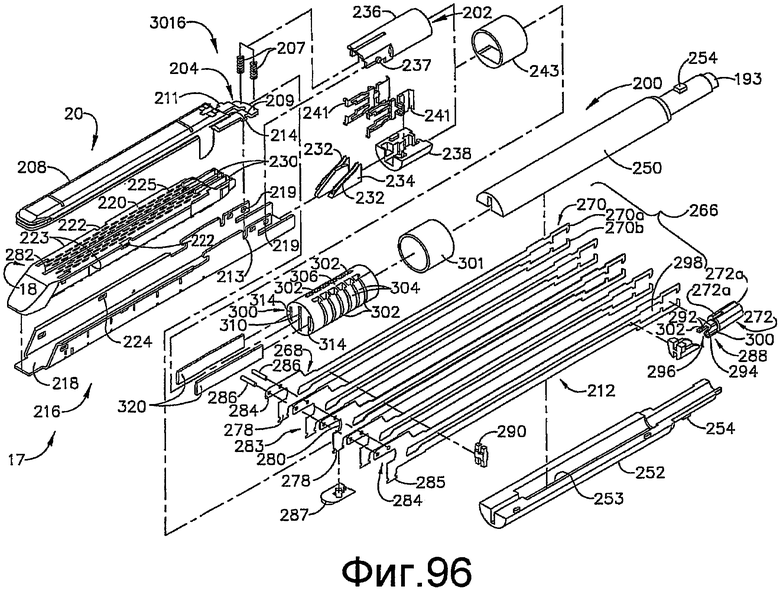
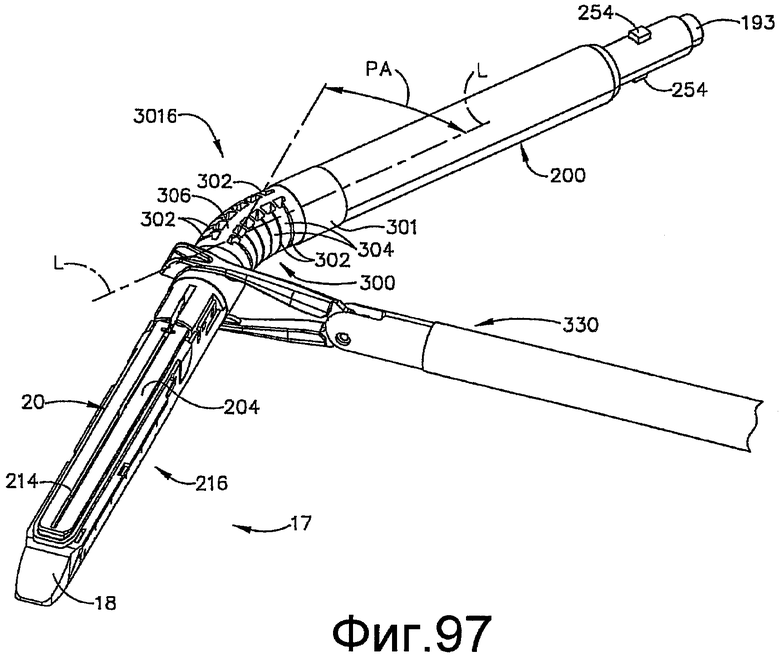
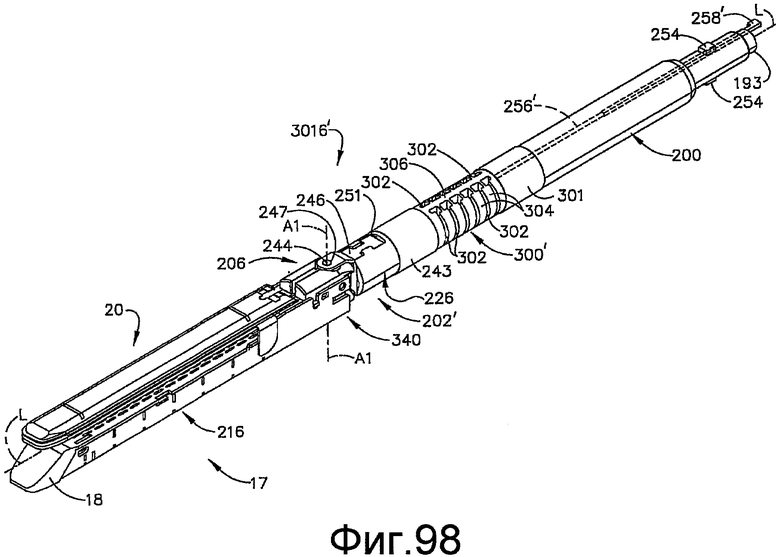
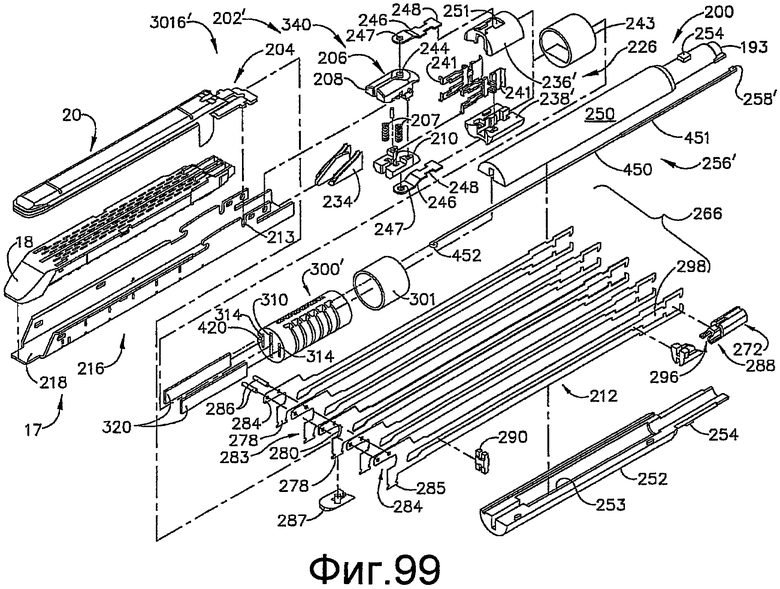
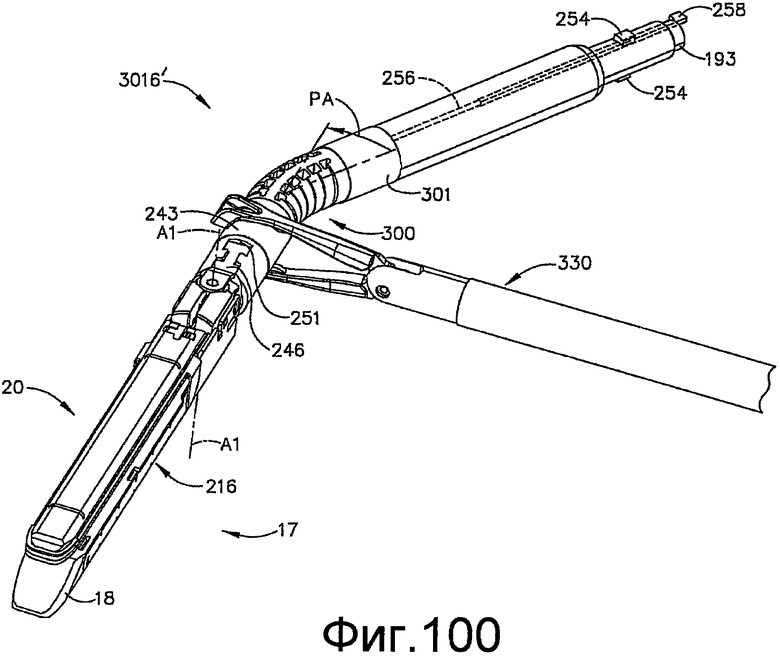
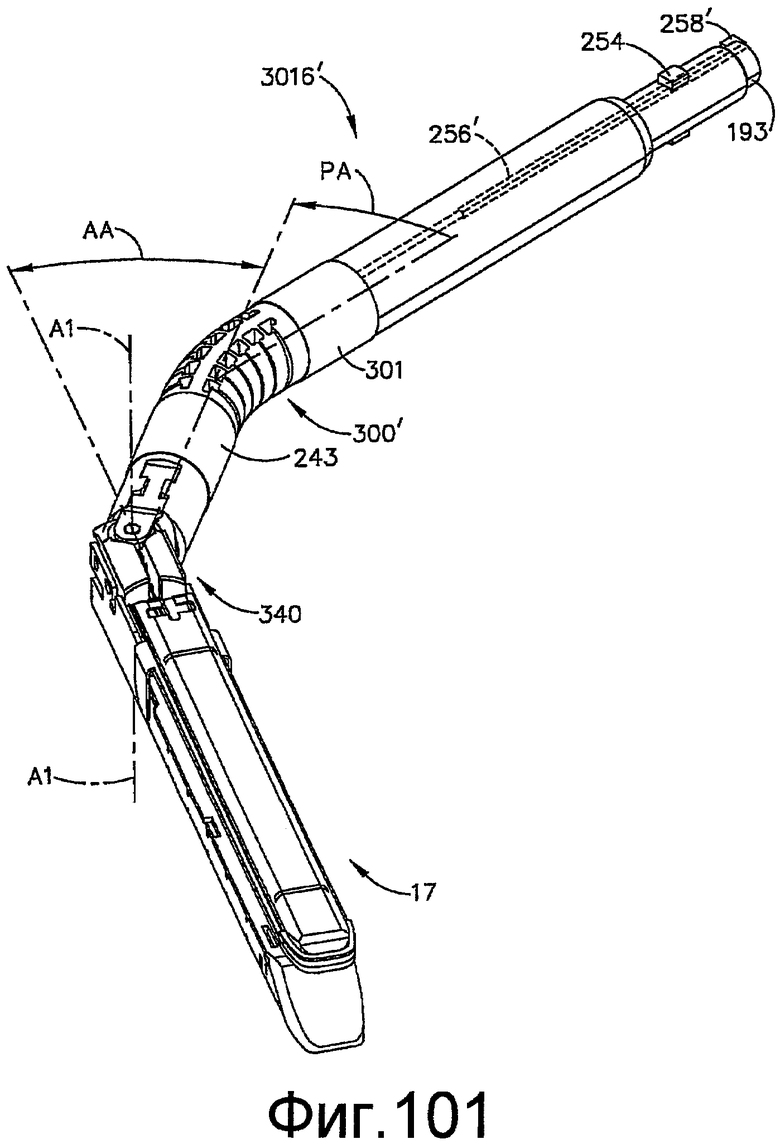
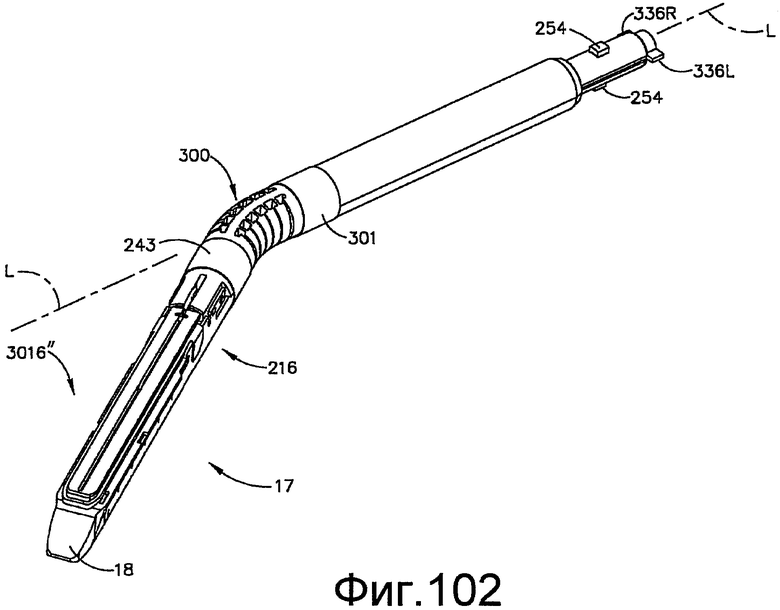
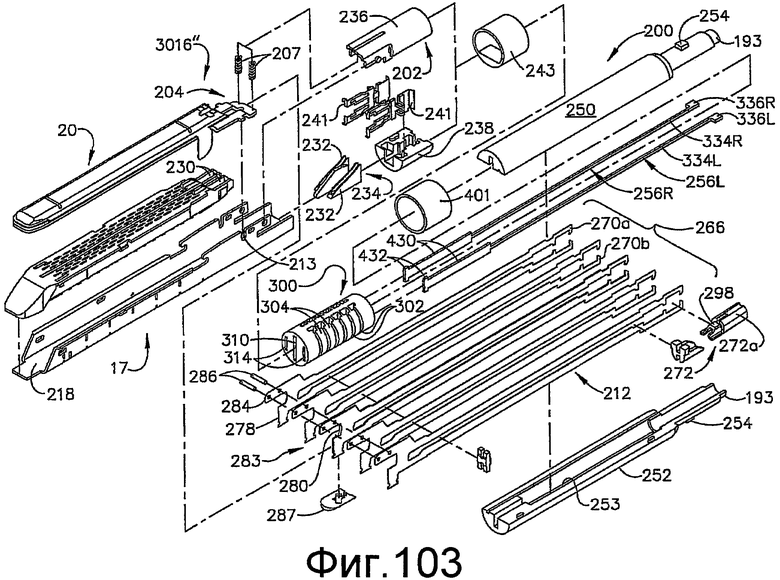
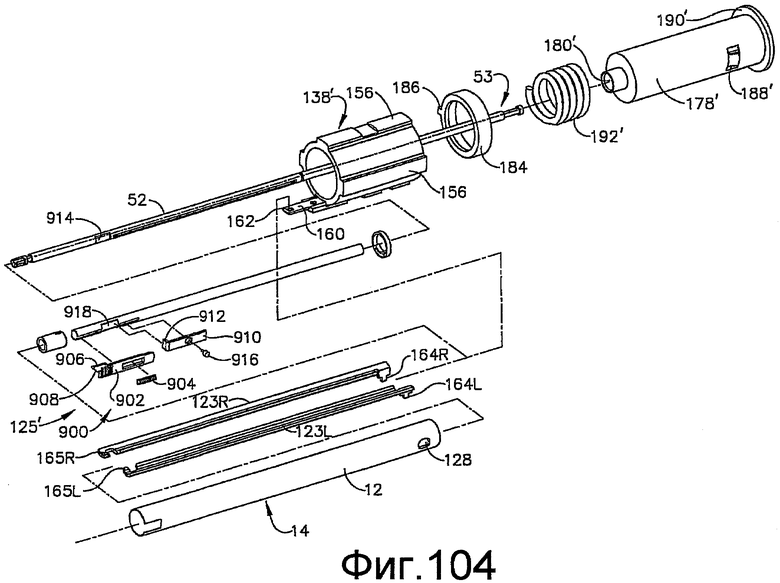
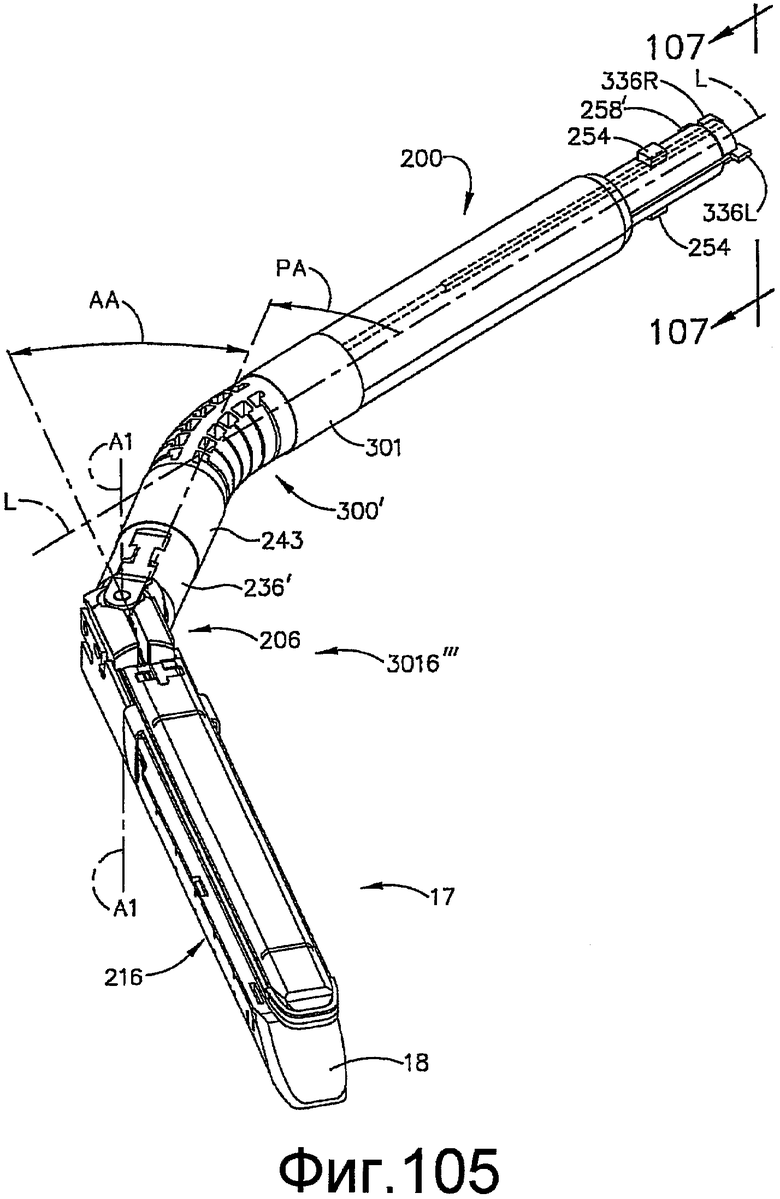
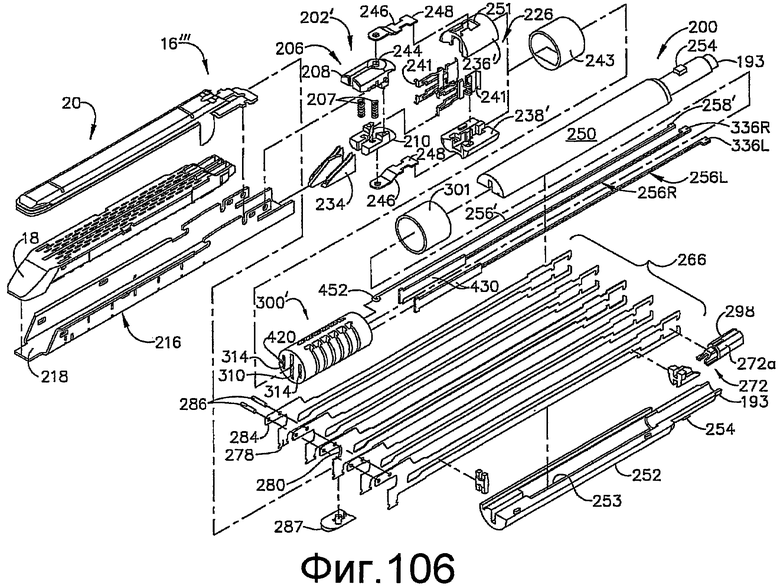
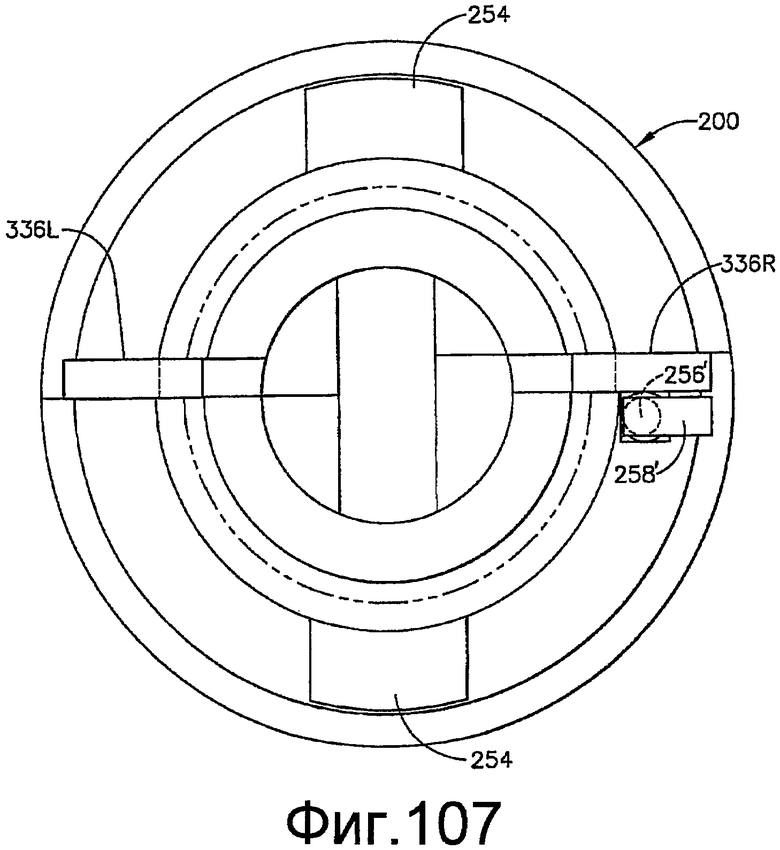
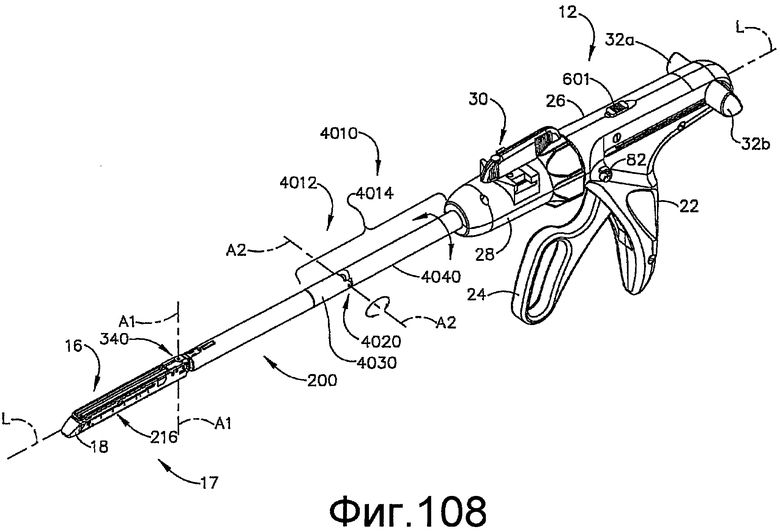
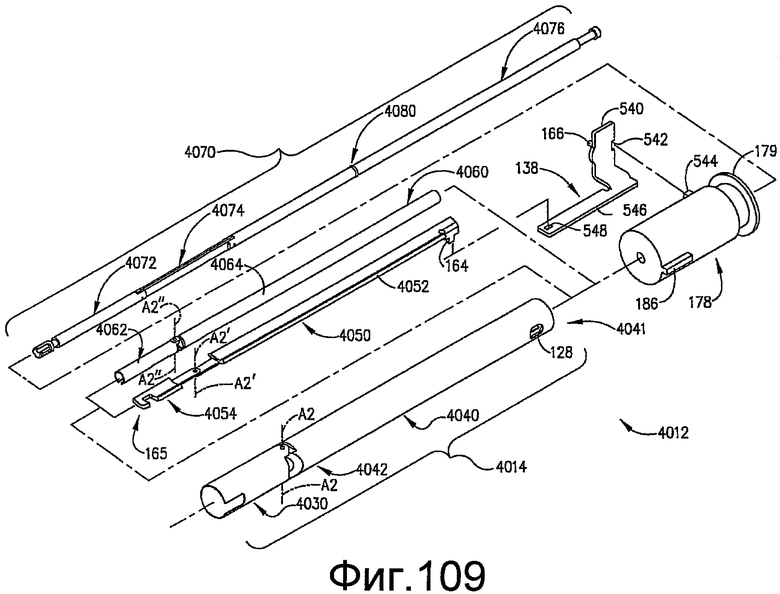
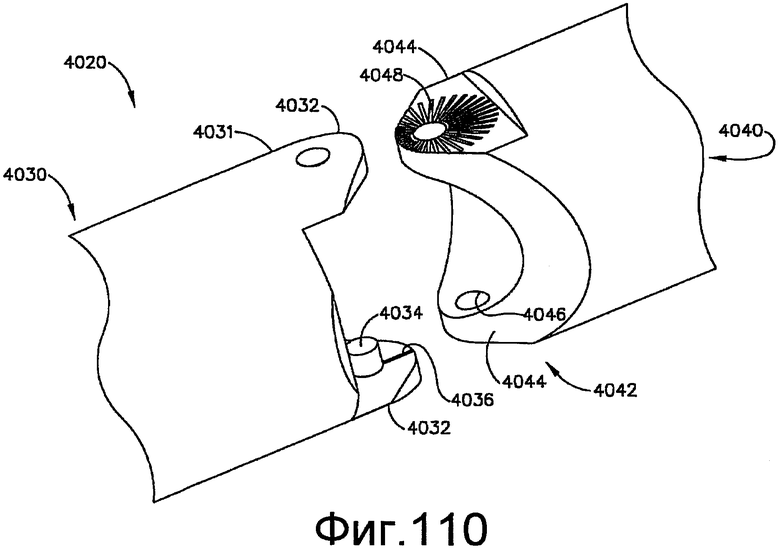
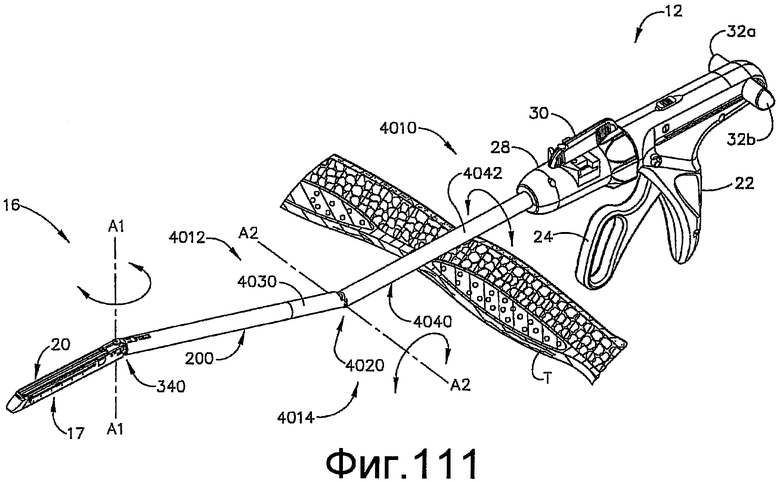
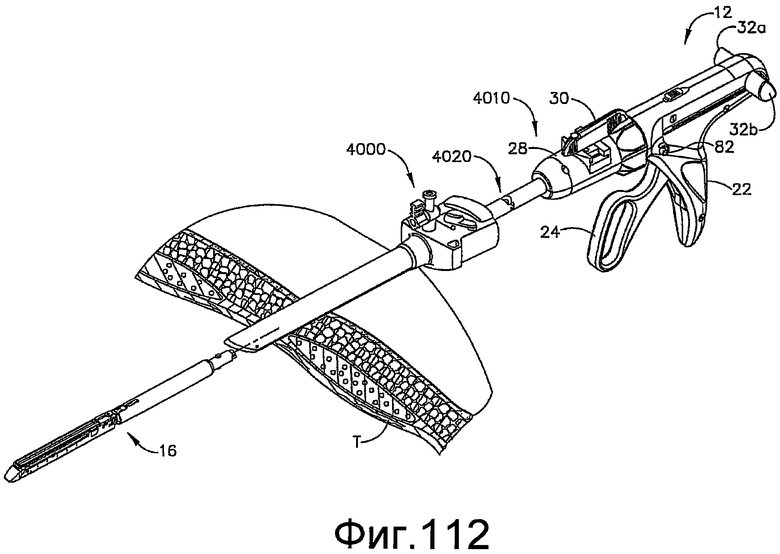
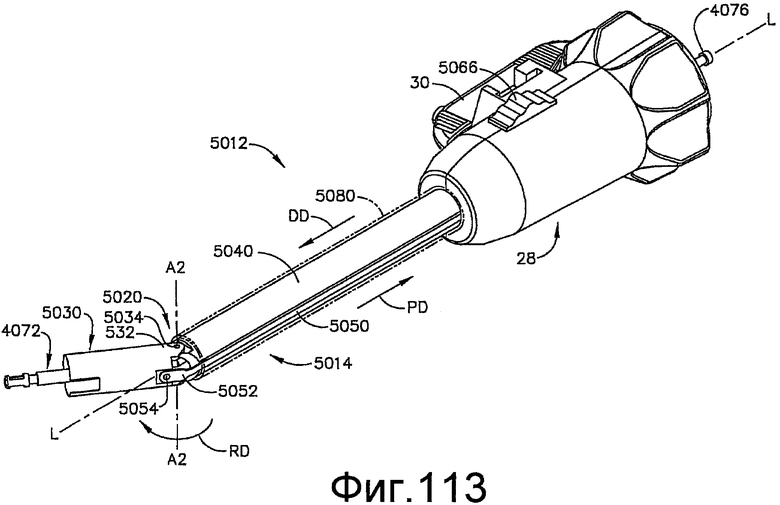
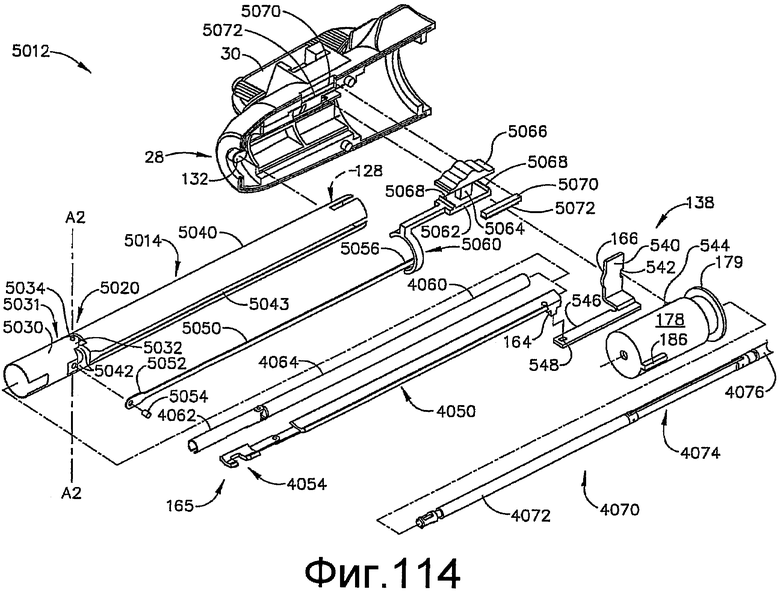
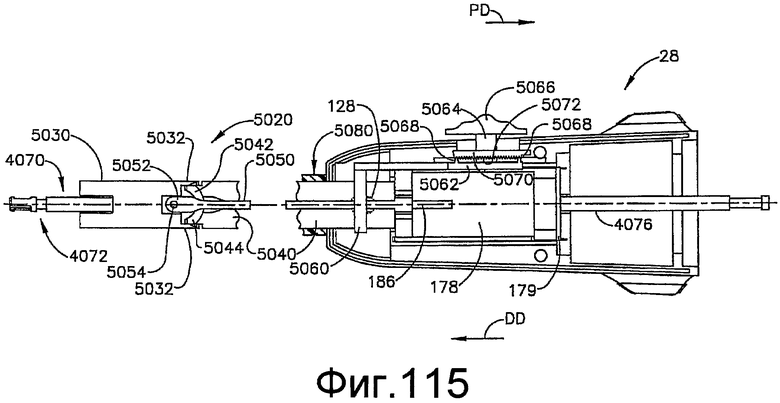
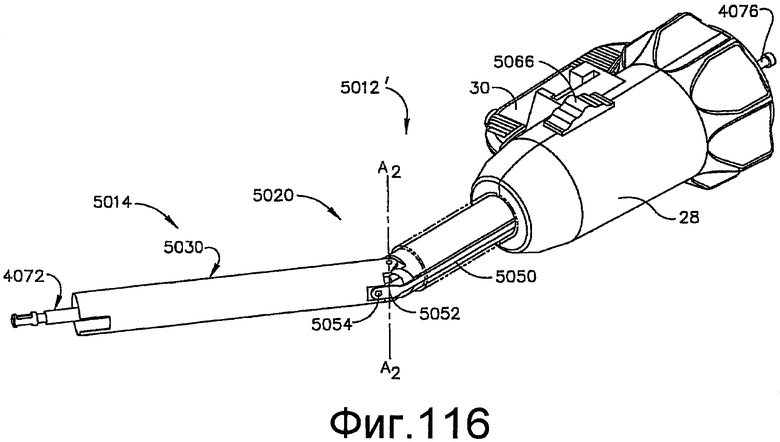
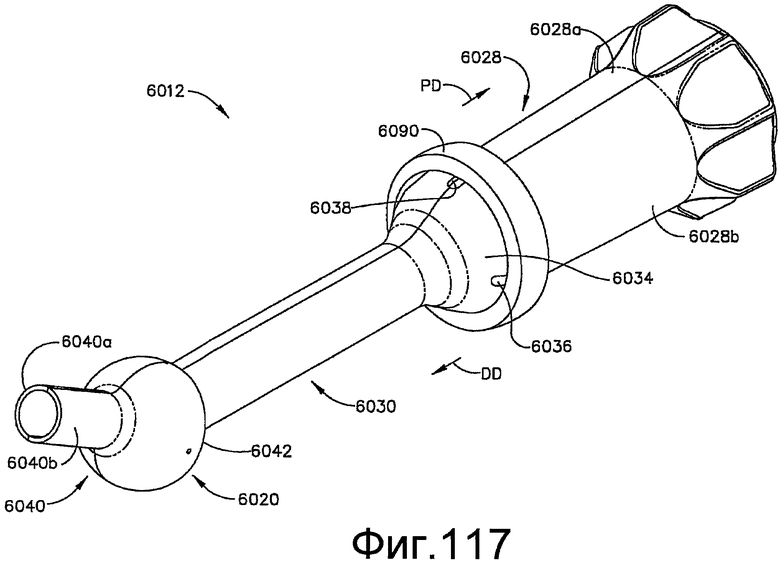
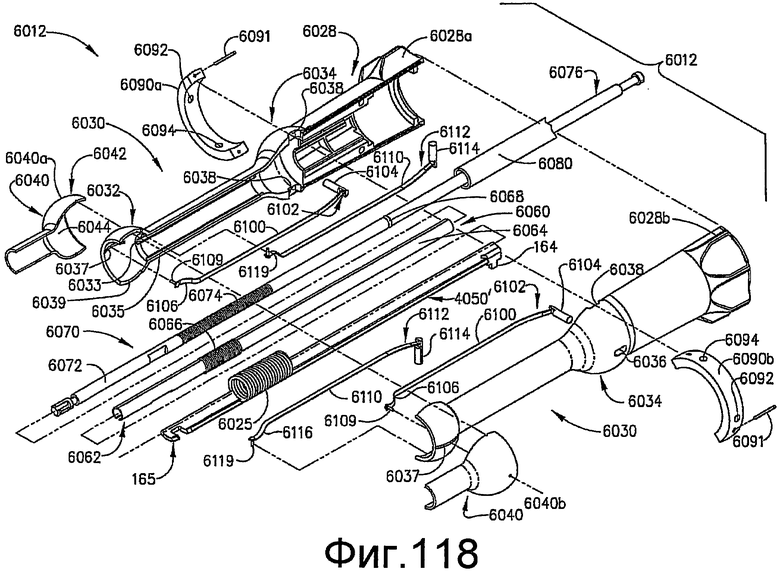
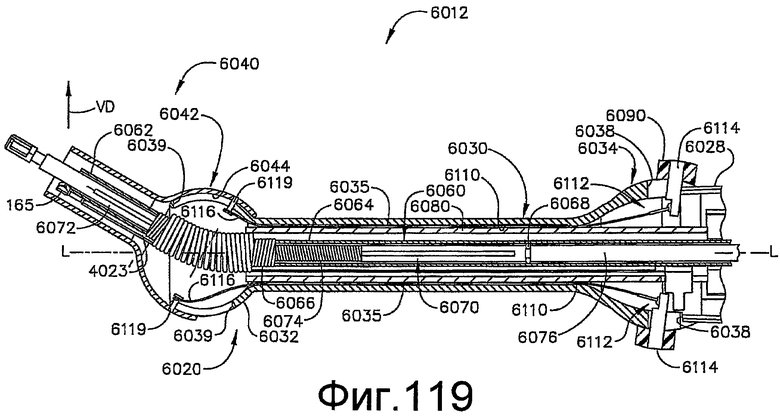
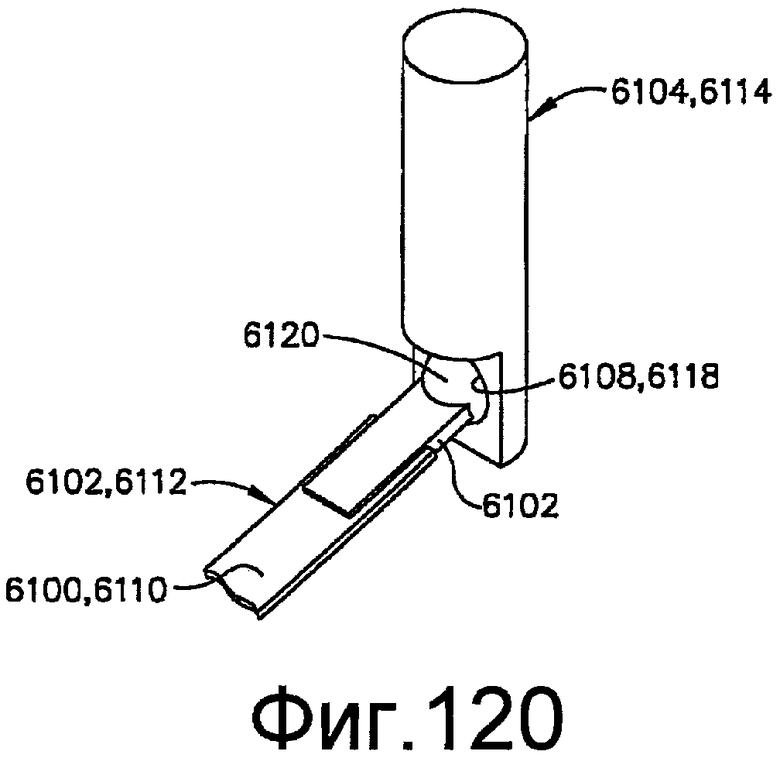
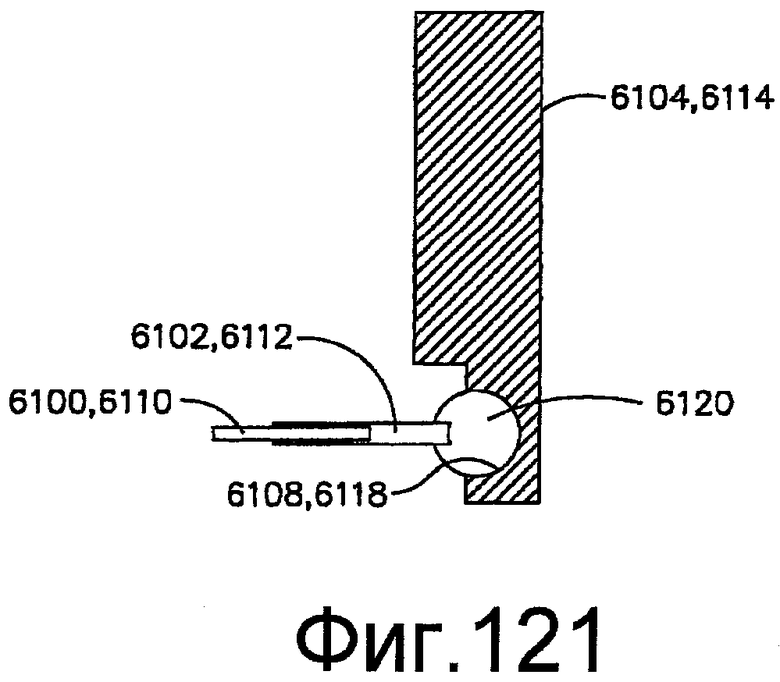
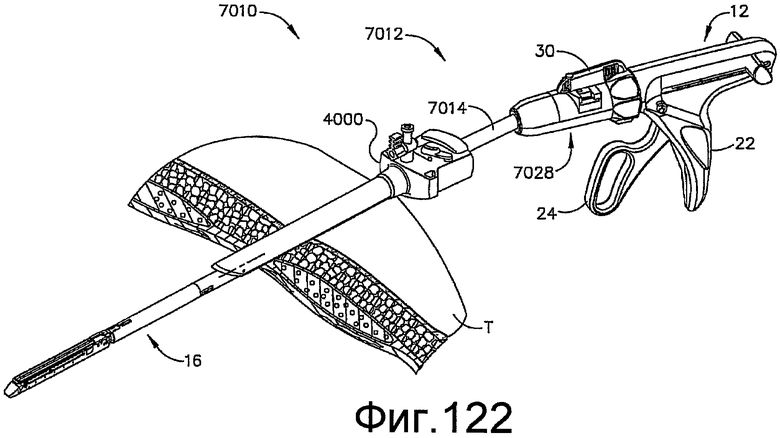
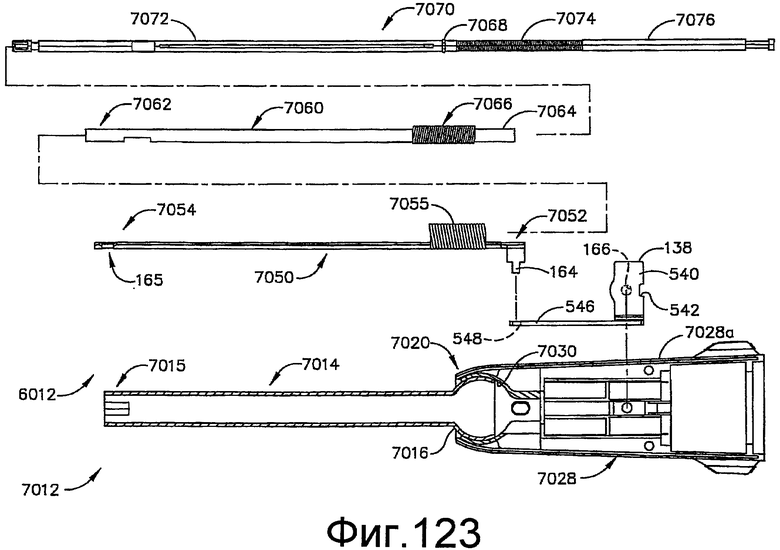
Изобретение относится к медицинской технике. Хирургический сшивающий скобками аппарат в различных вариантах осуществления содержит поворотный удлиненный корпус, одноразовый загрузочный модуль и поворотный кожух на узле рукоятки. Поворотный удлиненный корпус продолжается из поворотного кожуха и имеет дистальный конец. Дистальный конец выполнен с возможностью соединения с одноразовым загрузочным модулем. Аппарат дополнительно содержит фиксируемую систему поворота для селективной фиксации поворотного кожуха, чтобы предотвращать его поворот вокруг продольной оси. В результате аппарат имеет возможность улучшенного шарнирного поворота, включая способность шарнирного поворота инструмента с использованием одной руки. 12 з.п. ф-лы, 123 ил.
1. Хирургический сшивающий скобками аппарат, содержащий;
узел рукоятки, содержащий корпус рукоятки и подвижную рукоятку, при этом подвижную рукоятку можно перемещать относительно корпуса рукоятки при выполнении рабочего хода;
приводящий стержень, установленный, по меньшей мере, частично в корпус рукоятки и смонтированный с возможностью создания приводящих движений в ответ на манипулирование подвижной рукояткой;
поворотный кожух, подвижно соединенный с корпусом рукоятки;
удлиненный корпус, соединенный с поворотным кожухом для поворотного движения вместе с поворотным кожухом вокруг продольной оси, заданной удлиненным корпусом, при этом удлиненный корпус имеет дистальный конец, выполненный с возможностью рабочего соединения с одноразовым загрузочным модулем, и проксимальный конец, сопрягающийся с приводящим стержнем для передачи приводящих движений от приводящего стержня одноразовому загрузочному модулю; и
фиксируемую систему поворота для селективной фиксации поворотного кожуха, чтобы предотвращать его поворот вокруг упомянутой продольной оси.
2. Хирургический сшивающий скобками аппарат по п.1, дополнительно содержащий систему шарнирного поворота, установленную с возможностью функционирования на узел рукоятки и сопрягающуюся с удлиненным корпусом для селективного подведения к нему шарнирно-поворотных движений.
3. Хирургический сшивающий скобками аппарат по п.2, в котором фиксируемая система поворота содержит тормозную систему, выполненную с возможностью предотвращения перемещения системы шарнирного поворота во время поворота поворотного кожуха.
4. Хирургический сшивающий скобками аппарат по п.3, в котором упомянутая тормозная система содержит: кольцо блокировки поворота на участке поворотного кожуха; и стопорную задвижку, установленную с возможностью перемещения в корпус рукоятки для селективного зубчатого зацепления с кольцом блокировки поворота так, что, когда стопорная задвижка находится в зацеплении с кольцом блокировки поворота, упомянутый поворотный кожух заблокирован от поворота вокруг упомянутой продольной оси.
5. Хирургический сшивающий скобками аппарат по п.3, дополнительно содержащий захват, установленный с возможностью перемещения на поворотном кожухе и соединенный с возможностью функционирования с системой шарнирного поворота, при этом упомянутый захват сопрягается с тормозной системой так, что тормозная система может селективно фиксировать упомянутый захват к поворотному кожуху для предотвращения аксиального перемещения захвата на поворотном кожухе.
6. Хирургический сшивающий скобками аппарат по п.5, в котором упомянутая тормозная система содержит:
кольцо блокировки поворота на участке поворотного кожуха;
тормозную трубку, установленную с возможностью поворота в корпусе рукоятки для селективного аксиального движения в нем;
переключающую планку, соединенную с тормозной трубкой и селекторным переключателем так, что приведение в действие селекторного переключателя перемещает тормозную трубку аксиально внутри корпуса рукоятки;
стопорную задвижку, связанную с селекторным переключателем, для селективного зубчатого зацепления с кольцом блокировки поворота на поворотном кожухе так, что, когда стопорная задвижка находится в зацеплении с кольцом блокировки поворота, поворотный кожух заблокирован от поворота вокруг продольной оси, и когда стопорная задвижка выведена из зацепления с кольцом блокировки поворота, поворотный кожух может поворачиваться относительно кожуха рукоятки;
селективно раздвигаемый тормозной бандаж, установленный на поворотном кожухе, между поворотным кожухом и упомянутым захватом, при этом раздвигаемый тормозной бандаж можно селективно перемещать между раздвинутым положением и нераздвинутым положением так, что, когда раздвигаемый тормозной бандаж находится в раздвинутом положении, упомянутый захват заблокирован от аксиального перемещения на поворотном кожухе, и, когда раздвигаемый тормозной бандаж находится в нераздвинутом положении, упомянутый захват может аксиально перемещаться на поворотном кожухе; и
штифт тормозного рычага, сопрягающийся с раздвигаемым тормозным бандажом и тормозной трубкой таким образом, что аксиальное перемещение тормозной трубки в одном аксиальном направлении вынуждает раздвигаемый тормозной бандаж перемещаться в раздвинутое положение, и перемещение тормозной трубки в противоположном аксиальном направлении вынуждает раздвигаемый тормозной бандаж перемещаться в нераздвинутое положение.
7. Хирургический сшивающий скобками аппарат по п.5, в котором система шарнирного поворота приводится в действие аксиальным перемещением захвата на поворотном кожухе.
8. Хирургический сшивающий скобками аппарат по п.7, в котором, когда захват аксиально перемещается на поворотном кожухе в дистальном направлении, система шарнирного поворота сообщает шарнирно-поворотное движение в первом направлении, и, когда захват аксиально перемещается на поворотном кожухе в проксимальном направлении, система шарнирного поворота сообщает шарнирно-поворотное движение во втором направлении.
9. Хирургический сшивающий скобками аппарат по п.2, дополнительно содержащий средство для обеспечения звуковой сигнализации о положении системы шарнирного поворота.
10. Хирургический сшивающий скобками аппарат по п.2, в котором упомянутая система шарнирного поворота содержит:
сдвигаемый элемент, установленный с возможностью перемещения в поворотном кожухе для селективного продольного перемещения в нем, при этом сдвигаемый элемент сопрягается с удлиненным корпусом; и
шарнирно-поворотный элемент, установленный с возможностью перемещения на поворотном кожухе и сопрягающийся с возможностью функционирования с упомянутым сдвигаемым элементом.
11. Хирургический сшивающий скобками аппарат по п.10, в котором упомянутый шарнирно-поворотный элемент содержит:
кольцо шарнирного поворота, соединенное на резьбе с внешней поверхностью поворотного кожуха; и
штифт шарнирного поворота, находящийся в зацеплении с кольцом шарнирного поворота и сдвигаемым элементом таким образом, что, когда кольцо шарнирного поворота подается по резьбе на поворотном кожухе, сдвигаемый элемент принуждается к аксиальному перемещению в поворотном кожухе.
12. Хирургический сшивающий скобками аппарат по п.1, в котором фиксируемая система поворота содержит блокируемую головку, установленную с возможностью перемещения на корпусе рукоятки, для селективного перемещения между первым положением фиксации, в котором блокируемая головка находится в зацеплении с поворотным кожухом для предотвращения его поворота относительно узла рукоятки, и вторым положением расфиксации, в котором поворотный кожух можно поворачивать относительно узла рукоятки поворотом блокируемой головки.
13. Хирургический сшивающий скобками аппарат по п.12, дополнительно содержащий поджимной элемент между корпусом рукоятки и узлом блокируемой головки, чтобы поджимать узел блокируемой головки в первое положение фиксации.
| ЕР 1884206 А1, 06.02.2008 | |||
| ЕР 1884204 А2, 06.02.2008 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 4566620 A, 28.01.1986 | |||
| Хирургический аппарат для наложения компрессионных швов | 1979 |
|
SU1022703A1 |
| ХИРУРГИЧЕСКИЙ СТЕПЛЕР ДЛЯ НАЛОЖЕНИЯ ЦИЛИНДРИЧЕСКОЙ СПИРАЛЕВИДНОЙ СКОБКИ | 2003 |
|
RU2244516C1 |

