Изобретение относится к авиационной технике и предназначено для использования при построении самолетов, в частности, с системой формирования резервной информации.
Известен самолет, в состав которого входят, в том числе, фюзеляж, крыло, оперение, шасси, основная и вспомогательная силовые установки, система управления общесамолетным оборудованием, которая имеет два контура автоматического управления, конструктивно оформленных в основной и резервный блоки преобразований и вычислений, подключенные к исполнительным устройствам через блок управления и контроля, а также контур ручного управления с пультами управления, светосигнальным табло и центральным светосигнальным огнем и сопряжена по мультиплексному каналу с комплексом бортовых цифровых вычислительных машин, электронной системой управления левого двигателя, электронной системой управления правого двигателя, системой регистрации и контроля, аппаратурой наведения и посадки, комплексной системой управления, а по кодовым линиям связи - с системой управления и контроля топлива, аппаратурой речевых сообщений, комплексной системой электронной индикации и вспомогательной силовой установкой (RU 2263044 С1, В64С 13/00).
Недостаток известного самолета связан с недостаточной реализацией функций формирования резервной информации о пространственном положении.
Наиболее близким к предложенному является легкий многофункциональный самолет с повышенными маневренными возможностями, содержащий, в том числе, фюзеляж, крыло, оперение, шасси, силовую установку, а также управляющий интегрированный комплекс, включающий в себя систему информационного обмена, бортовую цифровую вычислительную систему управления полетом и учебно-боевыми действиями, внешнее запоминающее устройство и систему ввода информации, пилотажно-навигационное оборудование, комплексную систему управления самолетом с установленными в кабине летчика и оператора пультами системы, систему управления вооружением с установленными в кабине летчика и оператора пультами системы, комплексную систему электронной индикации, управления и прицеливания, информационные табло аварийной сигнализации, установленные в кабине летчика и оператора, двукратно резервированную систему управления общесамолетным оборудованием, бортовую систему объективного контроля, речевую информационно-управляющую систему, систему электроснабжения, внешнее и внутреннее светотехническое оборудование, комплексную систему аварийного покидания самолета, двукратно резервированную электронную систему управления силовой установкой, при этом система информационного обмена разделена на три независимых мультиплексных канала информационного обмена, между вычислительной системой и системой управления общесамолетным оборудованием, а также между комплексной системой электронной индикации, управления и прицеливания и комплексной системой управления самолетом выполнены радиальные связи. (Патент RU 2252899 C1, B64C 13/00, приоритет 20.05.2004).
Недостатком прототипа является недостаточная реализация функций формирования резервной информации о пространственном положении.
Задачей изобретения является создание самолета, обеспечивающего повышенные возможности по реализации функций формирования резервной информации о пространственном положении.
Для решения поставленной задачи предложен самолет с управляющим интегрированным комплексом, содержащий фюзеляж (1), крыло (2), оперение (3), шасси (4), силовую установку (5), пилотажно-навигационный комплекс, комплексную систему электронной индикации, комплексную систему аварийного покидания самолета, систему объективного контроля, комплексную систему управления, систему общесамолетного оборудования, нашлемную систему целеуказания, речевую информационно-управляющую систему, систему ввода информации, пульты управления, бортовой комплекс связи, бортовые панели техобслуживания, а также управляющий интегрированный комплекс (6), включающий бортовую цифровую вычислительную систему (7), систему информационного обмена из мультиплексных и радиальных каналов, а также системы и/или блоки сопряжения со всеми функциональными комплексами и системами самолета, в котором БЦВС (7) через соответствующие системы и/или блоки сопряжения связана мультиплексными каналами с комплексной системой электронной индикации, пультами управления, пилотажно-навигационным комплексом, комплексной системой электронной индикации, системой объективного контроля, комплексной системой управления, комплексом вооружения и системой общесамолетного оборудования, при этом система формирования резервной информации (СФРИ) (27) связана своими входами с пилотажно-навигационным комплексом (ПНК) (15) и комплексной системой управления самолетом (КСУ) (16). В СФРИ (27) блоки вычисления среднего значения (БВСЗ) (28-32) связаны с блоком определения позиционных резервных углов (БОПРУ) (33), блоком определения сдвига нулей позиционных резервных углов (БОСНПУ) (34), блоком коррекции позиционных резервных углов (БКПУ) (35). блоком кватернионного интегрирования угловых скоростей (БИУС) (36), блоком определения сдвига нулей ДУС КСУ - сдвига нулей угловых скоростей (БОСНУС) (37). блоком коррекции угловых скоростей (БКУС) (38), блоком стяжки резервных углов (БСУ) (39) и блоком-диспетчером (ДБ) (40).
Благодаря предложенному изобретению повышается уровень безопасности полетов за счет формирования резервной информации о пространственном положении в случае отказа основного источника информации и выдачи резервной информации в системы самолета и на индикацию летчику.
Изобретение поясняется прилагаемыми чертежами, на которых:
на фиг.1 изображен общий вид самолета с системой формирования резервной информации;
на фиг.2 изображена схема управляющего интегрированного комплекса;
на фиг.3 - схема системы формирования резервной информации;
на фиг.4 - функциональная схема системы формирования резервной информации;
на фиг.5-14 - блок схемы функционирования блоков системы формирования резервной информации,
где
1 - фюзеляж;
2 - крыло;
3 - оперение;
4 - шасси;
5 - силовая установка (СУ);
6 - управляющий интегрированный комплекс (УИК);
7 - бортовая цифровая вычислительная система (БЦВС);
8 - первая бортовая цифровая вычислительная машина (БЦВМ-1);
9 - вторая бортовая цифровая вычислительная машина (БЦВМ-2);
10 - система сопряжения с пультами управления (СС ПУ);
11 - система сопряжения с комплексной системой электронной индикации (СС КСЭИ);
12 - система сопряжения с речевой информационно-управляющей системой (СС РИУС);
13 - система сопряжения с системой ввода информации (СС СВИ);
14 - система сопряжения с нашлемной системой целеуказания (СС НСЦ);
15 - система сопряжения с пилотажно-навигационным комплексом (СС ПНК);
16 - система сопряжения с комплексной системой управления самолетом (СС КСУ);
17 - система сопряжения с бортовым комплексом связи (СС БКС);
18 - система сопряжения с системой объективного контроля (СС СОК);
19 - система сопряжения с системой управления силовой установкой (СС СУ СУ);
20 - система сопряжения с комплексной системой аварийного покидания самолета (СС КСАПС);
21 - система сопряжения с бортовыми панелями техобслуживания (СС БПТО);
22 - система сопряжения с комплексом вооружения (СС KB);
23 - система сопряжения с общесамолетным оборудованием (СС ОСО);
24 - первый мультиплексный канал информационного обмена (МКИО-I);
25 - второй мультиплексный канал информационного обмена (МКИО-II);
26 - третий мультиплексный канал информационного обмена (МКИО-III);
27 - система формирования резервной информации (СФРИ);
28-32 - блоки вычисления среднего значения (БВСЗ);
33 - блок определения позиционных резервных углов (БОПРУ);
34 - блок определения сдвига нулей позиционных резервных углов (БОСНПУ);
35 - блок коррекции позиционных резервных углов (БКПУ);
36 - блок кватернионного интегрирования угловых скоростей (БИУС);
37 - блок определения сдвига нулей ДУС КСУ - сдвига нулей угловых скоростей (БОСНУС);
38 - блок коррекции угловых скоростей (БКУС);
39 - блок стяжки резервных углов (БСУ);
40 - блок-диспетчер (ДБ).
Самолет с управляющим интегрированным комплексом (фиг.1) содержит фюзеляж (1), крыло (2), оперение (3), шасси (4), силовую установку (5), а также другие функциональные комплексы и системы, необходимые для обеспечения работы самолета.
Управляющий интегрированный комплекс (УИК) (6) (фиг.2) представляет собой совокупность взаимосвязанных программно-аппаратных средств, объединенных системой информационного обмена. УИК (6) содержит:
бортовую цифровую вычислительную систему (БЦВС) (7) с двумя бортовыми цифровыми вычислительными машинами: БЦВМ-1 (8) и БЦВМ-2 (9);
системы и/или блоки сопряжения с другими комплексами или системами самолета;
систему информационного обмена, состоящую из мультиплексных и радиальных каналов, для связи всех систем самолета с БЦВС (7).
В качестве систем и/или блоков сопряжения УИК (6) содержит: систему сопряжения с пультами управления (СС ПУ) (10), систему сопряжения с комплексной системой электронной индикации (СС КСЭИ) (11); систему сопряжения с речевой информационно-управляющей системой (СС РИУС) (12); систему сопряжения с системой ввода информации (СС СВИ) (13); систему сопряжения с нашлемной системой целеуказания (СС НСЦ) (14); систему сопряжения с пилотажно-навигационным комплексом (СС ПНК) (15); систему сопряжения с комплексной системой управления самолетом (СС КСУ) (16); систему сопряжения с бортовым комплексом связи (СС БКС) (17); систему сопряжения с системой объективного контроля (СС СОК) (18); систему сопряжения с системой управления силовой установкой (СС СУ СУ) (19); систему сопряжения с комплексной системой аварийного покидания самолета (СС КСАПС) (20); систему сопряжения с бортовыми панелями техобслуживания (СС БПТО) (21); систему сопряжения с комплексом вооружения (СС KB) (22); систему сопряжения с общесамолетным оборудованием (СС ОСО) (23).
Система информационного обмена состоит из мультиплексных и радиальных каналов информационного обмена, в конкретном варианте исполнения легкий многофункциональный самолет с управляющим интегрированным комплексом (6) содержит в системе информационного обмена три мультиплексных канала (24-26).
В управляющем интегрированном комплексе БЦВС (7) посредством мультиплексных каналов связана с такими комплексами и системами самолета, как комплексная система электронной индикации (КСЭИ), пилотажно-навигационный комплекс (ПНК), комплексная система управления самолетом (КСУ), система объективного контроля (СОК), система управления силовой установкой (СУ СУ), комплексная система аварийного покидания самолета (КСАП), комплекс вооружения (KB), система общесамолетного оборудования через соответствующие системы сопряжения (11, 15, 16, 18, 19, 20, 22, 23).
Система формирования резервной информации (СФРИ) (27) связана своими входами с пилотажно-навигационным комплексом (ПНК) (15) и комплексной системой управления самолетом (КСУ) (16). В СФРИ (27) блоки вычисления среднего значения (БВСЗ) (28-32) связаны с блоком определения позиционных резервных углов (БОПРУ) (33), блоком определения сдвига нулей позиционных резервных углов (БОСНПУ) (34), блоком коррекции позиционных резервных углов (БКПУ) (35). блоком кватернионного интегрирования угловых скоростей (БИУС) (36), блоком определения сдвига нулей ДУС КСУ - сдвига нулей угловых скоростей (БОСНУС) (37), блоком коррекции угловых скоростей (БКУС) (38), блоком стяжки резервных углов (БСУ) (39) и блоком-диспетчером (ДБ) (40).
Работа самолета с системой формирования резервной информации (23) обеспечивает решение задачи вычисления угловых координат летательного аппарата двумя принципиально различными способами в зависимости от текущих условий полета:
- вычисление текущих значений углов тангажа и крена по формулам Эйлера на основе мгновенной информации от бортовых датчиков (при условии горизонтального полета);
- вычисление текущих значений угловых координат путем интегрирования показаний датчиков угловых скоростей (ДУС) комплексной системы управления (КСУ) с использованием кватернионов (при выполнении маневрирования).

Выходными данными СФРИ являются значения резервных углов курса, крена и тангажа (см. таблицу 2).
Выходные данные СФРИ
Блок вычисления среднего значения (БВСЗ) - 1 служит для вычисления среднего значения входного параметра по набору значений или по времени. БВСЗ 1 служит для вычисления среднего значения входного осредняемого параметра Х из выборки величиной Nmax штук, где Nmax задается программно. БВСЗ может быть использован для определения среднего значения на определенном интервале времени, для чего необходимо воспользоваться формулой (1):

где Δt - требуемый интервал времени,
τкв - период квантования (периодичность обращения к алгоритму).
БВСЗ позволяет сбросить накопленное среднее значение Xmid и заново начать вычисление путем передачи в блок команды «Reset_X». Входные данные, используемые БВСЗ, приведены в таблице 3.
Входные данные БВСЗ
Выходом БВСЗ является среднее значения входной величины X (см. табл.4).
Выходные данные БВСЗ
В процессе работы БВСЗ хранит ряд параметров (см. табл.5). Индексация массивов в описании алгоритмов начинается с единицы «1», т.е. Array_Х=(Array_X[1],..., Array_X[Nmax]).
Параметры БВСЗ
В СФРИ используется пять экземпляров БВСЗ, от 1.1 до 1.5. Взаимосвязь данных каждого экземпляра БВСЗ и данных СФРИ приведена в табл.6.
Взаимосвязь данных экземпляров БВСЗ и СФРИ
Блок определения позиционных резервных углов (БОПРУ) 2 служит для определения текущих значений крена и тангажа по мгновенным показаниям штатных самолетных датчиков - «позиционных углов» (при их определении не происходит интегрирования угловых скоростей).
В блоке вычисляют значения углов крена и тангажа на основе применения формул Эйлера, используя данные от бортовых датчиков. Требуемая частота вычисления алгоритма (не менее) fвыч≥16. Отсутствие интегрирования при вычислении значений углов в БОПРУ позволяет избавиться от ухода вычисляемых значений со временем.
Входные данные, используемые БОПРУ, приведены в таблице 9.
Входные данные БОПРУ
Выходом БОПРУ являются значения углов крена и тангажа позиционные (см. таблицу 10).
Выходные данные БОПРУ
Блок фильтрации и подготовительной обработки входных данных (БФПВХ)
Входные данные, используемые БФПВХ, приведены в таблице 11.
Входные данные БВСЗ
Выходные данные БФПВХ приведены в таблице 12.
Выходные данные БФПВХ
БФПВХ представляет собой композиции элементарных типовых звеньев и тригонометрических функций (см. фиг.3).
Блок вычисления функций траекторного угла (БВФТУ)
Входные данные, используемые БВФТУ, приведены в таблице 13.
Входные данные БВФТУ
Выходные данные БВФТУ приведены в таблице 14.
Выходные данные БВФТУ
Алгоритм, реализуемый в БВФТУ, показан на фиг.4.
Входные данные, используемые БВРУ, приведены в таблице 15.
Входные данные БВРУ
Выходные данные БВРУ приведены в таблице 16.
Выходные данные БВРУ
Структура блока вычисления резервных углов (БВРУ) представлена на фиг.5. Каждый из блоков А-Д (см. фиг.5) реализует отдельные функции:
А) Блок вычисления γp1_предв:

Б) Блок вычисления γp2_предв:

В) Блок выбора γp_предв:

Г) Блок вычисления ϑр:

Д) Блок выбора γp:

Блок кватернионного интегрирования угловых скоростей (БИУС) служит для вычисления по корректированным угловым скоростям ДУС КСУ значений угловых координат летательного аппарата при помощи кватернионов - вычисления «кватернионных углов».
БИУС интегрирует поступающие на его вход корректированные значений угловых скоростей ωx, ωy, ωz.
При получении сигнала «СБРОС» алгоритм, реализуемый в блоке, осуществляет привязку вычисляемых углов к новому значению: в качестве новых начальных условий интегрирования угловых координат начинает использовать значение Уну=ψну, ϑну, γну.
Входные данные, используемые БИУС, приведены в таблице 17.
Входные данные БИУС
Выходные данные БИУС приведены в таблице 18.
Выходные данные БИУС
Структура алгоритма, реализуемого в БИУС, приведена на фиг.6.
Блок определения сдвига нулей ДУС КСУ - сдвига нулей угловых скоростей (БОСНУС) служит для определения величин искажений типа «сдвиг нуля» - значения сигнала, выдаваемого датчиком при нулевом значении измеряемой величины, - в характеристиках ДУС КСУ. Искажение сдвиг нуля вносит помеху постоянной величины в измеряемую величину.
При наличии искажений вида сдвиг нуля в сигналах угловых скоростей ДУС КСУ в результате интегрирования сигналов в БИУС будет наблюдаться расхождение истинных и вычисленных значений углов пропорционально времени.
БОСНУС организует сравнение значений угловых координат, вычисленных при помощи БИУС от ДУС КСУ одного резерва с эталонным значением угловых координат (выдаются блоком-диспетчером) и при нарастании отклонений углов до заданной пороговой величины по соответствующей координате до ψпрг/ϑпрг/γпрг производит вычисление поправок - оценок сдвига нулей ωх0, ωу0, ωz0 - для коррекции угловых скоростей от ДУС КСУ и снижения скорости расхождения угловых координат.
Вычисление величин оценок сдвига нулей ωх0, ωу0, ωz0 происходит итерационно. На начальных итерациях при одном знаке оценки сдвига нуля и добавки к ней добавки к оценкам вычисляют с единичным коэффициентом настройки: kн=1, при смене знака добавки для исключения автоколебаний добавка вычисляется с коэффициентом kн=0,7. Величина оценок на каждой итерации равна ωх0[n+1]=ωх0[n]+kн·Δωх0[n+1] (аналогично для у и z).
Вычисленная величина оценки проверяется на принадлежность к области допустимых значений сдвига нуля (на основе характеристик ДУС КСУ). Если на какой-то итерации оценка выходит за допустимые приделы, то вычисленная на данной итерации добавка оценки аннулируется. Вычисленные величины оценок на текущем шаге сохраняются в памяти (область видимости весь СФРИ) для использования в других блоках.
Входные данные, используемые БОСНУС приведены в таблице 19.
Входные данные БОСНУС
Выходные данные БОСНУС приведены в таблице 20.
Выходные данные БИУС
В процессе работы БОСНУС хранит ряд параметров, см. таблицу 21.
Параметры БОСНУС
В описании блока используются константы, значения которых приведены в таблице 22.
Константы БОСНУС
Структура алгоритма, реализуемого в БОСНУС, приведена на фиг.7.
Блок коррекции угловых скоростей (БКУС) реализует простой алгоритм коррекции значений угловых скоростей от ДУС:



Блок определения сдвига нулей позиционных резервных углов (БОСНПУ) служит для вычисления величины суммарного искажения вида «сдвиг нуля», вносимого в вычисленные значения позиционных углов датчиками исходной информации для проведения последующей коррекции.
Алгоритм, реализуемый в БОСНПУ, показан на фиг.8. Алгоритм представляет собой две одинаковые структурные схемы, позволяющие компенсировать отклонение позиционных углов от углов БИНС, принимаемых в данном блоке в качестве эталонных - проводить стяжку углов. Величина, накопленная на интегралах, представляет собой оценку сдвига нуля позиционных углов. Вычисленные величины оценок на текущем шаге сохраняются в памяти (область видимости весь СФРИ) для использования в других блоках. Условием выполнения алгоритма является поступление сигнала «БОСНПУ_ВКЛ» от блока-диспетчера. При поступлении в БОСНПУ сигнала отмены стяжки позиционных углов «СПУ_ОТКЛ» входы интеграторов размыкаются (на интегратор подается «0»).
Входные данные, используемые БОСНПУ, приведены в таблице 23.
Входные данные БОСНПУ
Выходные данные БОСНПУ приведены в таблице 24.
Выходные данные БОСНПУ
Блок коррекции позиционных резервных углов (БКПУ) реализует простой алгоритм коррекции позиционных резервных углов:


Блок стяжки резервных углов (БСУ) служит для компенсации ошибок кватернионных углов, вызванных низкой точностью при задании Н.У. в блоке БИУС. Алгоритм, реализуемый в данном блоке, показан на фиг.10. Алгоритм представляет собой две одинаковые структурные схемы, позволяющие компенсировать отклонение кватернионных углов от корректированных усредненных позиционных углов, принимаемых в данном блоке в качестве эталонных - проводить стяжку углов. При поступлении в БСУ сигнала отмены стяжки кватернионных углов «СКВУ_ОТКЛ» входы интеграторов размыкаются (на интегратор подается «0»).
Входные данные, используемые БСУ, приведены в таблице 25.
Входные данные БСУ
Выходные данные БСУ приведены в таблице 26.
Выходные данные БСУ
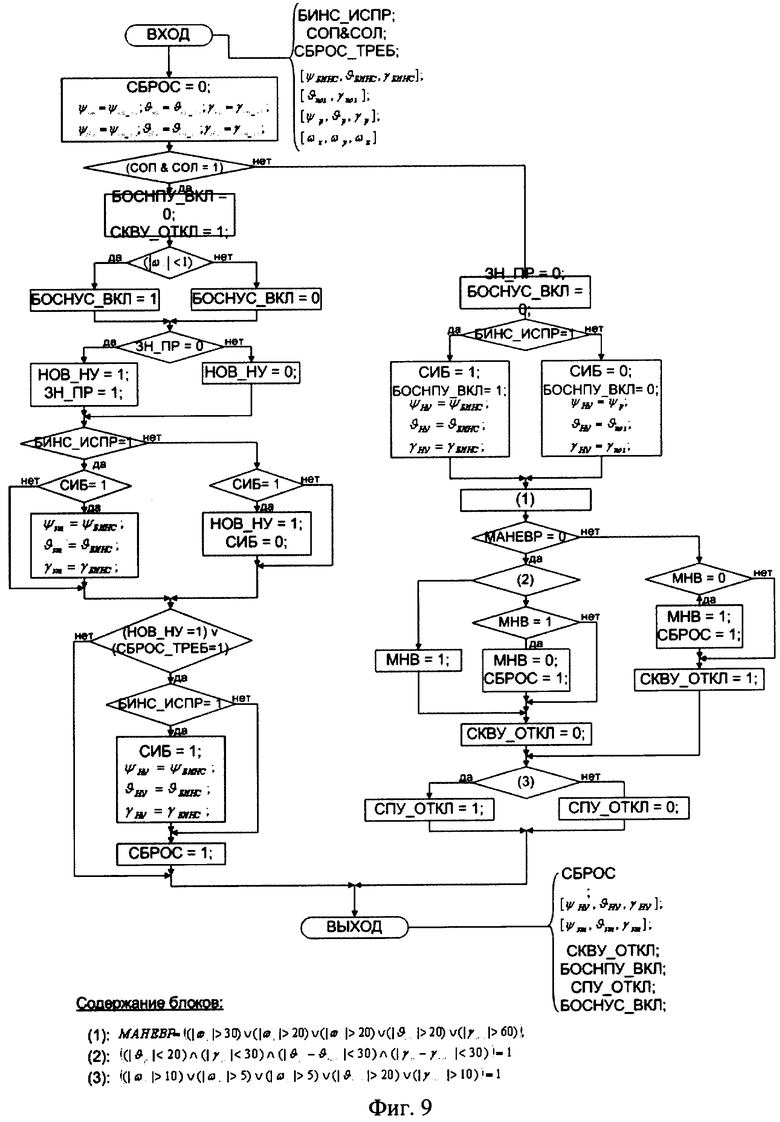
Блок-диспетчер (ДБ) служит для управления ходом вычисления резервных углов КСУ в зависимости от состояния бортовой аппаратуры и условий полета. ДБ рассматривает четыре возможных текущих состояния полета, в зависимости от которых включает тот или иной блок СФРИ:
1) летательный аппарат неподвижен на земле: происходит вычисление сдвигов нулей угловых скоростей - ДБ включает блок БОСНУС. В качестве резервных углов выдаются кватернионные;
2) летательный аппарат движется по земле: управляемые ДБ блоки отключены, в качестве резервных углов выдаются кватернионные;
3) летательный аппарат совершает квазигоризонтальный полет (угловые скорости малы, крен и тангаж малы): происходит определение сдвигов нулей позиционных углов (БОСНПУ), производится стяжка кватернионных углов к позиционным углам (БСУ). В качестве резервных углов выдаются позиционные;
4) летательный аппарат совершает маневрирование: в качестве резервных углов выдаются кватернионные.
На границе состояний 3 и 4 происходит ввод новых Н.У. для БИУС: если БИНС исправна, то заводятся углы от БИНС, иначе заводятся позиционные углы.
Входные данные, используемые ДБ приведены в таблице 27.

Выходные данные ДБ приведены в таблице 28.
Выходные данные ДБ
В процессе работы ДБ хранит ряд параметров (см. таблицу 29).
Параметры ДБ
Алгоритм ДБ показан на фиг.11.
Изобретение может быть использовано в авиационной технике при построении самолетов с системой формирования резервной информации о пространственном положении для выдачи ее в системы самолета и на индикацию летчику в случае внезапного отказа основных источников.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324623C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ИСПОЛЬЗУЮЩЕЕ КОМБИНИРОВАННУЮ СИСТЕМУ ИНФОРМАЦИОННОГО ОБМЕНА | 2000 |
|
RU2166461C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252899C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ С МУЛЬТИПЛЕКСНОЙ СИСТЕМОЙ ИНФОРМАЦИОННОГО ОБМЕНА | 2001 |
|
RU2174485C1 |
| МНОГОПОЗИЦИОННЫЙ ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252900C1 |












Изобретение относится к авиационной технике. Особенностью самолета с управляющим интегрированным комплексом является использование системы формирования резервной информации о пространственном положении. Система содержит блоки вычисления среднего значения входного параметра соответственно резервного позиционного тангажа, резервного позиционного угла крена и кватернионных значений курса, тангажа, крена, блок определения позиционных резервных углов, блок коррекции позиционных резервных углов, блок определения сдвига нулей позиционных резервных углов, блок стяжки резервных углов, блок кватернионного интегрирования угловых скоростей, блок коррекции угловых скоростей, блок определения сдвига нулей угловых скоростей и блок-диспетчер. Работа системы основана на вычислении угловых координат летательного аппарата двумя принципиально различными способами в зависимости от текущих условий полета. Предусматриваются, в частности, вычисление текущих значений углов тангажа и крена по формулам Эйлера на основе мгновенной информации от бортовых датчиков (при условии горизонтального полета) и вычисление текущих значений угловых координат путем интегрирования показаний датчиков угловых скоростей комплексной системы управления с использованием кватернионов (при выполнении маневрирования). Изобретение обеспечивает повышенные возможности самолета по решению возложенных на него задач за счет исключения погрешности определения резервной информации. Самолет с системой формирования резервной информации характеризуется повышенной безопасностью полетов в случае внезапного отказа основных источников информации о пространственном положении. 14 ил., 27 табл.
Самолет с управляющим интегрированным комплексом, содержащий фюзеляж, крыло, оперение, шасси, силовую установку, пилотажно-навигационный комплекс, комплексную систему электронной индикации, комплексную систему аварийного покидания самолета, систему объективного контроля, комплексную систему управления, систему общесамолетного оборудования, нашлемную систему целеуказания, речевую информационно-управляющую систему, систему ввода информации, пульты управления, бортовой комплекс связи, бортовые панели техобслуживания, а также управляющий интегрированный комплекс, включающий бортовую цифровую вычислительную систему, систему информационного обмена из мультиплексных и радиальных каналов, а также системы и/или блоки сопряжения со всеми функциональными комплексами и системами самолета, в котором бортовая цифровая вычислительная система через соответствующие системы и/или блоки сопряжения связана мультиплексными каналами с комплексной системой электронной индикации, пультами управления, пилотажно-навигационным комплексом, комплексной системой электронной индикации, системой объективного контроля, комплексной системой управления, комплексом вооружения и системой общесамолетного оборудования, отличающийся тем, что дополнительно содержит систему формирования резервной информации о пространственном положении летательного аппарата, состоящую из блоков вычисления среднего значения входного параметра соответственно резервного позиционного тангажа, резервного позиционного угла крена и кватернионных значений курса, тангажа и крена, блока определения позиционных резервных углов, блока коррекции позиционных резервных углов, блока определения сдвига нулей позиционных резервных углов, блока стяжки резервных углов, блока кватернионного интегрирования угловых скоростей, блока коррекции угловых скоростей, блока определения сдвига нулей угловых скоростей, блока-Диспетчера, при этом блок стяжки резервных углов выходом и двумя входами связан соответственно с первым входом и первым и вторым выходами блока-Диспетчера и соответствующими входами с выходами блоков вычисления среднего значения входного параметра, которые первыми входами связаны с третьим выходом блока-Диспетчера, а вторыми входами с соответствующими выходами блоков коррекции позиционных резервных углов и блока кватернионного интегрирования угловых скоростей, блок коррекции позиционных резервных углов первым входом связан с выходом блока определения сдвига нулей позиционных резервных углов, а вторым входом - с выходом блока определения позиционных резервных углов, соединенным с первым входом блока определения сдвига нулей позиционных резервных углов, который вторым и третьим входами соединен с четвертым и пятым выходами блока-Диспетчера, блок кватернионного интегрирования угловых скоростей первым и вторым входами соединен соответственно с третьим и шестым выходами блока-Диспетчера, а третьим входом - с первым выходом блока коррекции угловых скоростей, соединенным с входом блока определения позиционных резервных углов, второй выход блока коррекции угловых скоростей соединен со вторым входом блока-Диспетчера, а его вход соединен с первым выходом блока определения сдвига нулей угловых скоростей, который вторым выходом и первым и вторым входами соединен соответственно с третьим входом, седьмым и восьмым выходами блока-Диспетчера, а третьим входом соединен с выходом блока кватернионного интегрирования угловых скоростей, четвертый вход блока-Диспетчера соединен с выходами блоков вычисления средних значений резервных позиционных углов тангажа и крена.
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| Способ определения средней скорости речного и иного потока | 1940 |
|
SU58211A1 |
| US 6564628 B1, 20.05.2003 | |||
| US 4914598 А, 03.04.1990. | |||

