Изобретение относится к вычислительной технике и предназначено для регистрации и контроля входных параметров, а именно, параметров полета летательного аппарата.
Известно бортовое устройство регистрации полетных данных, содержащее блок сбора полетной информации, блок установки служебных параметров и защищенной бортовой накопитель [1]
Недостатком известного устройства регистрации полетных данных является снижение достоверности регистрируемой информации за счет ее потери при перезаписи на переносную кассету, увеличение времени обработки за счет перезаписи информации и организации последовательного доступа к ней при наземной обработке полетных данных.
Наиболее близким по технической сущности к изобретению является бортовое устройство регистрации полетных данных, содержащее блок датчиков полетных параметров, состоящий из информационных комплексов курса и вертикали и высотно-скоростных параметров, датчиков силовой установки, навигационного комплекса, системы автоматического управления, системы управления вооружением, датчиков топливной и гидросистемы, первый, второй и третий коммутаторы, первый и второй преобразователи, выходной регистр, схему формирования кода текущего времени, генератор импульсов, делитель частоты, счетчик, устройство записи и накопитель на магнитной ленте, причем первая, вторая и третья группы полетных параметров соединены с первыми группами входов соответственно первого, второго и третьего коммутаторов, вторые входы которых объединены и соединены с первыми выходом счетчика, выходы первого и второго коммутаторов соединены соответственно со входами первого и второго преобразователей, группы выходов которых соединены соответственно с первой и второй группами входов выходного регистра, третий вход которого соединен с выходом третьего коммутатора, выход генератора импульсов соединен со входом делителя частоты, выход которого соединен со входом схемы формирования кода текущего времени, группа выходов которой соединена с четвертой группой входов выходного регистра, группа выходов которого соединена через устройство записи с группой входов накопителя на магнитной ленте [2]
Недостатком данного устройства регистрации полетных данных является снижение достоверности регистрируемой информации за счет потери ее части при перезаписи на переносную кассету, увеличение времени обработки и ее усложнение за счет перезаписи информации и организации последовательного доступа к ней.
Цель изобретения повышение достоверности информации и сокращение времени ее обработки.
Указанная цель достигается тем, что в бортовое устройство регистрации полетных данных, содержащее блок датчиков полетных параметров, первый, второй и третий коммутаторы, первый и второй преобразователи, выходной регистр, генератор импульсов, делитель частоты, счетчик, причем первая, вторая и третья группа выходов блока датчиков полетных параметров соединена с первыми группами входов соответственно первого, второго и третьего коммутаторов, вторые входы которых соединены с первым, вторым и третьим выходами счетчика, третьи входы первого и второго коммутаторов соединены с шиной приведения к нулю, выходы которых соединены с первыми входами первого и второго преобразователей, группы выходов преобразователей соединены с первой и второй группой входов выходного регистра, третий вход которого соединен с выходом третьего коммутатора, выход генератора импульсов соединен через делитель частоты со входом счетчика, дополнительно введены блок памяти, контроллер, микропроцессорное устройство, линия задержки и устройство прямого доступа к памяти, первая группа входов которого соединена с группой выходов выходного регистра, второй вход через линию задержки соединен с выходом делителя, первая и вторая группы выходов соединены соответственно с первой и второй группами входов микропроцессорного устройства, а третья и четвертая группы входов соответственно с первой и четвертой группами выходов микропроцессорного устройства, вторая и третья группы выходов которого соединены соответственно с первой и второй группами входов контроллера, первая и вторая группы выходов которого соединены соответственно с первой и второй группами входов блока памяти.
Новыми признаками, обладающими существенными отличиями, являются новые связи между новыми и известными признаками, т.е. новая схема устройства.
Данные признаки обладают существенными отличиями, т.к. в известных технических решениях не обнаружены.
Применение всех новых признаков позволяет повысить достоверность информации за счет накопления информации в бортовом энергонезависимом магнитном оперативном запоминающем устройстве, исключающего потери информации при ее перезаписи на промежуточный носитель, и сократить время обработки за счет организации хранения информации с произвольным доступом к ней и выполнения вычислительных и логических операций по межполетному контролю непосредственно на борту летательного аппарата.
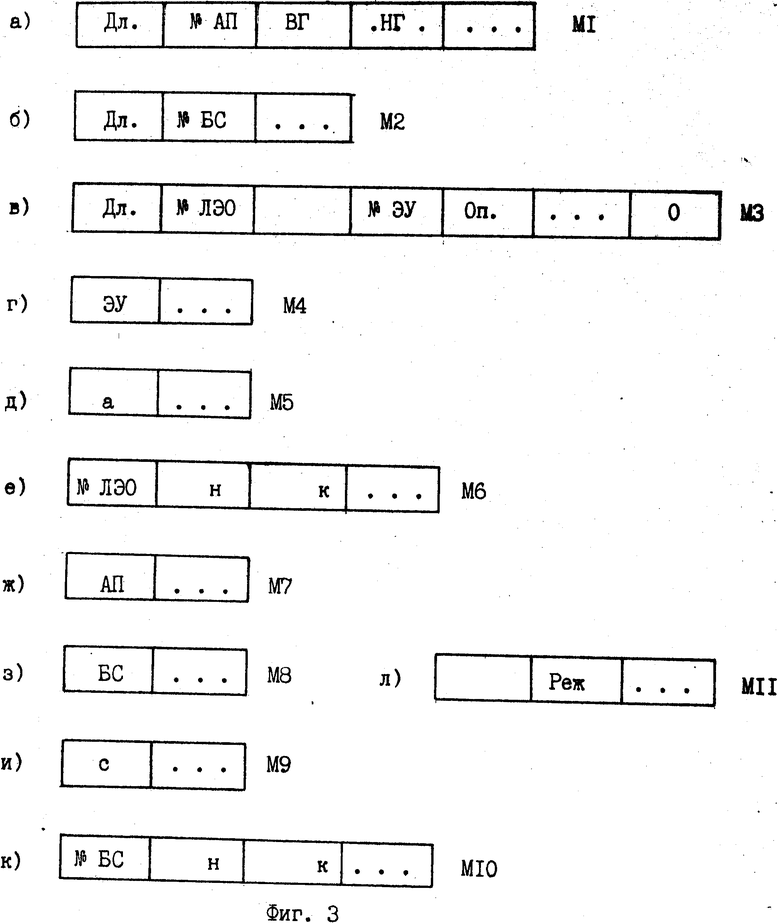
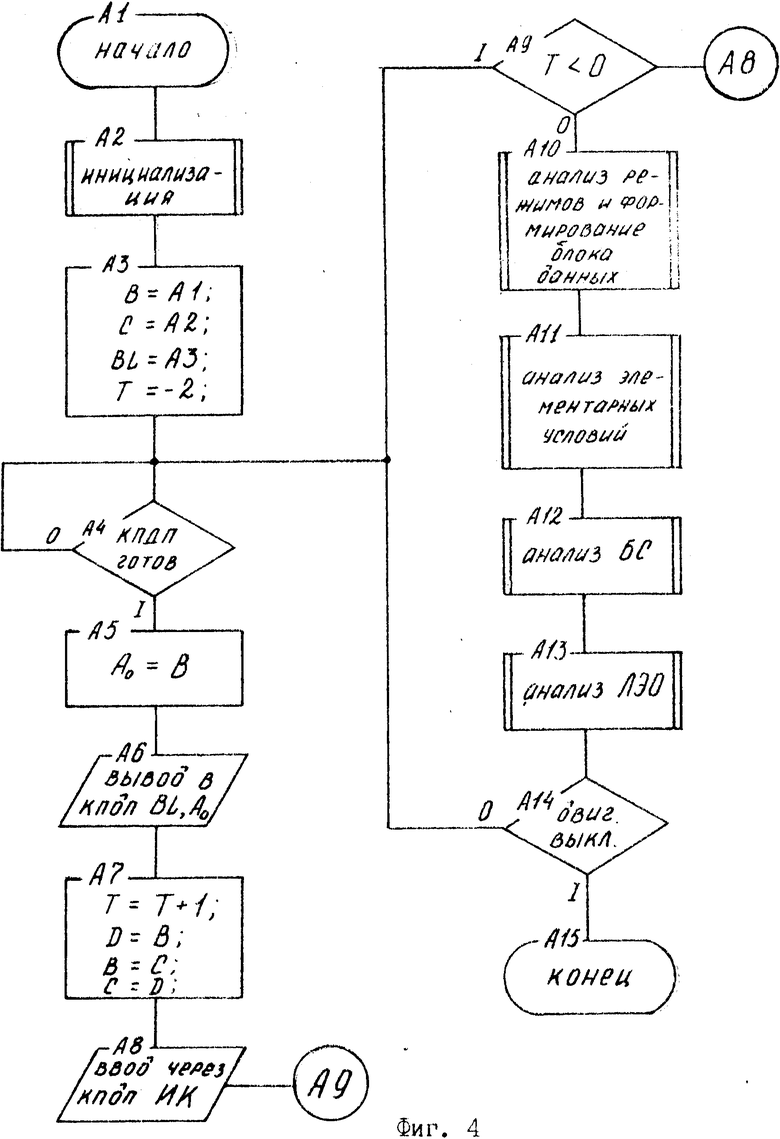
На фиг.1 изображена блок-схема бортовой регистрации полетных данных; на фиг.2 блок-схема выходного регистра 7; на фиг.3 структуры следующих массивов информации, хранящихся в формируемых соответственно в постоянной и оперативной памяти микропроцессорного устройства 13: а) массив элементарных условий М1; б) массив адресов бинарных сигналов (БС) и разовых команд (РК) - М2; в) массив существования летно-эксплуатационных ограничений (ЛЭО) М3; г) массив состояния элементарных условий М4; д) массив текущего состояния ЛЭО - М5; е) массив-протокол ЛЭО М6; ж) массив аналоговых параметров М7; з) массив БС и РК М8; и) массив текущего состояния БС и РК М9; к) массив-протокол РК и БС М10; л) массив указателей М11; на фиг.4 общая структура алгоритма; на фиг. 5 и 6 блок-схема инициализации данных; на фиг.7 блок-схема формирования блока данных (массивов М7 и М8); на фиг.8 блок-схема анализа элементарных условий; на фиг. 9 блок-схема анализа БС и РК; на фиг.10 и 11 блок-схема анализа нарушений ЛЭО и идентификации событий полета.
Бортовая система регистрации полетных данных содержит блок 1 датчиков полетных параметров, первый 2, второй 3 и третий 4 коммутаторы, аналого-цифровой преобразователь 5 и преобразователь 6 частоты в код, выходной регистр 7, генератор 8 импульсов, делитель 9 частоты, счетчик 10, причем первая, вторая и третья группы выходов блока 1 датчиков полетных параметров соединены с первыми группами входов соответственно первого 2, второго 3 и третьего 4 коммутаторов, вторые входы которых соединены с первым, вторым и третьим выходами счетчика 10, третьи входы первого 2 и второго 3 коммутаторов соединены с шиной приведения к нулю, выходы первого 2 и второго 3 коммутаторов соединены соответственно с первыми входами преобразователей 5 и 6, группы выходов преобразователей соединены соответственно с первой и второй группой входов выходного регистра 7, третий вход которого соединен с выходом третьего коммутатора 4, выход генератора 8 импульсов через делитель 9 частоты соединен с входом счетчика 10 и имеет блок 11 памяти, контроллер сопряжения 12, микропроцессорное устройство 13, линию 14 задержки и устройство 15 доступа к памяти, первая группа входов которого соединена с группой выходов выходного регистра 7, второй вход через линию 14 задержки соединен с входом делителя 9 частоты, первая и вторая группы выходов соединены соответственно с первой и второй группами входов микропроцессорного устройства 13, а третья и четвертая группы соответственно с первой и четвертой группами входов микропроцессорного устройства 13, вторая и третья группы выходов которого соединены соответственно с первой и второй группами контроллера 12, первая и вторая группы выходов которого соединены соответственно с первой и второй группами входов блока 11 памяти.
Блок 1 датчиков полетных параметров известен и состоит из информационных комплексов курса и вертикали и высотно-скоростных параметров, датчиков силовой установки, навигационного комплекса, системы автоматического управления, системы управления вооружением, датчиков топливной и гидросистем. Выходы датчиков объединены в три группы выходов блока 1 датчиков. Первую группу образуют выходы датчиков, выходными параметрами которых является напряжение постоянного тока, вторую группу выходы датчиков, выходными параметрами которых является напряжение тока переменной частоты, третью группу бинарные сигналы.
Первый 2, второй 3 и третий 4 коммутаторы представляют собой интегральные сборки мультиплексоров, обеспечивающие соединение определенного входа полетного параметра в первой группе входов коммутаторов с их выходами согласно адресу параметра, поступающему в виде цифрового кода на вторые входы коммутаторов.
Преобразователь 5 известен как аналого-цифровой преобразователь.
Преобразователь 6 представляет собой последовательно соединенные преобразователи типа "частота-напряжение" и напряжение-код" и служит для преобразования параметра, характеризуемого частотой, в цифровой код.
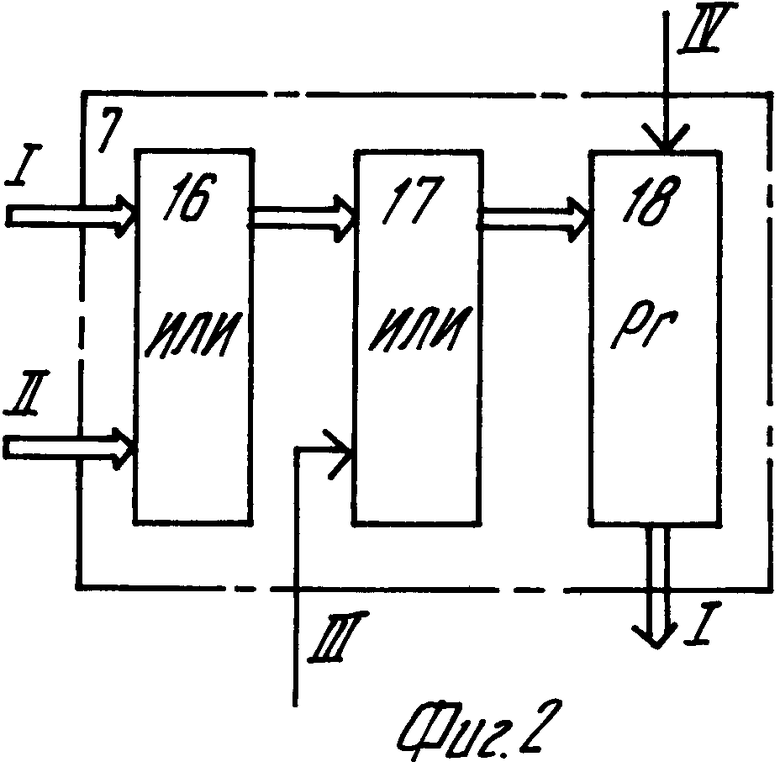
Выходной регистр 7 двоичный регистр, предназначенный для временного хранения двоичного кода аналогового параметра и одного бита бинарного сигнала.
Пример технического решения блока 7 приведен на фиг.2. С выхода преобразователей 5 и 6 коды аналоговых сигналов через первый и второй входы регистра 7 поступают на первые и вторые входы схемы ИЛИ 16, выход которой соединен с первой группой входов схемы ИЛИ 17, на второй вход которой через третий вход регистра 7 поступает бинарный сигнал (N 1 бит информации). Выход схемы ИЛИ 17 через группу входов регистра 18 соединен с выходом регистра 7, четвертый вход которого соединен со входом регистра 18. Именно этот вход регистра является входом для сигнала синхронизации регистра 7. Он может быть получен, например, путем подачи сигнала с выхода линии 14 задержки.
Система работает следующим образом.
С выхода преобразователей 5 и 6 коды аналоговых сигналов в непересекающиеся во времени интервалы, выбранные коммутаторами 2 или 3, поступают на один из входов схемы ИЛИ 16, объединяются с бинарным сигналом схемой ИЛИ 17 и в момент появления синхронизирующего сигнала объединенный код записывается в регистр 18.
Оба коммутатора 2 и 3 имеют идентичное исполнение и работают в "противофазе". В то время, когда один из них осуществляет передачу одного из сигналов с выхода блока 1 датчиков полетных параметров, другой коммутатор аналогичный вход использует для обнуления своего преобразователя. Для этого используемые для передачи сигналов входы коммутаторов объединены в их вторые входы, которые соединены с шиной приведения к нулю, приводящего к появлению на выходе преобразователя нулевого кода.
Генератор 8 импульсов, делитель 8 частоты и счетчик 10 известные микросхемы.
Блок 11 памяти представляет собой энергонезависимое запоминающее устройство на цилиндрических магнитных доменах. Оно включает в себя магнитные модули, формирователи токов и усилители считывания. Первая группа входов - шина команд, по которой поступают команды формирователям и усилителям токов. Вторая группа входов шина данных, по которой поступают данные для записи. Блок памяти конструктивно выполнен в виде съемной кассеты.
Контроллер сопряжения 12 программное устройство с микропрограммным управлением и служит для электронного сопряжения блока 11 памяти с микропроцессорным устройством 13, повышения надежности и быстродействия запоминающего устройства. Программы хранятся в программируемом постоянном запоминающем устройстве контроллера 12 и могут быть изменены в определенных пределах при изменении структуры блока 11 памяти. Первая группа входов контроллера шина адресов и команд, вторая группа входов шина данных.
Микропроцессорное устройство 13 известно. Оно состоит из центрального процессора, генератора тактовых импульсов, буферных устройств, фиксатора состояния, оперативной памяти, постоянной памяти. Оно предназначено для временного хранения полетных данных, регистрируемых в течение одной секунды, анализа режимов полета, распознавания отказов авиационной техники, факторов нарушения летно-эксплуатационных ограничений, управления работой контроллера 13 при записи полетных данных и результатов анализа в блок 11 памяти, управления работой устройства 15 прямого доступа к памяти. Программа работы микропрограммного устройства хранится в его постоянной памяти. Постоянная память хранит также базу данных, необходимую для идентификации фактов нарушения летно-эксплуатационных ограничений, отказов, режимов полета, структуры полетных данных.
Линия 14 задержки представляет собой ждущий мультивибратор и предназначена для формирования одиночного импульса запроса на прямой доступ к памяти в момент окончания формирования цифрового кода в выходном регистре 7.
Устройство 15 прямого доступа к памяти представляет собой известную микросхему. Оно предназначено для организации высокоскоростного обмена между выходным регистром 7 и оперативной памятью микропроцессорного устройства 13, минуя его центральный процессор. Первая группа входов предназначена для приема кода полетного параметра и бита бинарного сигнала из выходного регистра 7, вторая группа входов для приема сигнала запроса на прямой доступ к памяти, третья группа входов для приема начального адреса области памяти, куда будет осуществляться запись данных из выходного регистра, четвертая группа входов для приема количества обращений к памяти (длина области памяти), а также сигналов управления работой устройства. Первая группа выходов предназначена для выдачи в микропроцессорное устройство 13 значения текущего адреса записываемых в область памяти данных, вторая группа выходов для передачи в оперативную память самих данных и сигналов управления.
Бортовая система регистрации полетных данных работает следующим образом.
При включении питания производится обнуление счетчика 10, а также пуск программы работы микропрограммного устройства 13, описание соответствующего алгоритма которого приводится ниже. Загрузка кодов полетных параметров будет производиться в оперативную память микропроцессорного устройства 13 с помощью устройства 15 прямого доступа к памяти поочередно в одну из двух областей, причем обработка данных в одной совмещена во времени с загрузкой другой. С этой целью микропроцессорное устройство 13 передает в устройство 15 прямого доступа к памяти по первой группе выходов адрес начала области памяти для обмена данными, а по второй группе выходов длину блока данных, обмениваемых между оперативной памятью микропроцессорного устройства 13 и выходным регистром 7.
Длительность цикла регистрации составляет 1 с. В свою очередь каждый временной интервал в 1с с помощью тактовых импульсов, формируемых генератором 10 и делителем 8, разбивается на разные промежутки времени, в каждом из которых соответствующий выход блока 1 полетных параметров подключается к соответствующему преобразователю (5 или 6) или непосредственно к выходному регистру 7. Номер интервала времени формируется счетчиком. Номер интервала с первого выхода счетчика 10 поступает на вторые входы первого 2, второго 3 и третьего 4 коммутаторов в виде двоичного кода. На первые группы входов указанных коммутаторов поступают аналоговые параметры и бинарные сигналы. Аналоговый параметр с выхода соответствующего коммутатора поступает на вход одного из преобразователей. Первые коммутатор 2 и преобразователь 5 выполняют функции выборки и преобразования напряжения, пропорционального значению полетного параметра, в код. Вторые коммутатор 3 и преобразователь 6 выборки и преобразования частоты, пропорциональной значению полетного параметра, в код. Группы выходов обеспечивают передачу кода в выходной регистр 7. Двоичный бит, соответствующий бинарному сигналу или разовой команде, после коммутации поступает с выходом третьего коммутатора 4 на третий вход выходного регистра 7.
Тактовый импульс, соответствующий каждому моменту разбиения односекундного интервала на равные промежутки времени, с выхода делителя 9 через линию 14 задержки поступает в виде сигнала запроса на прямой доступ к памяти в устройство 15 прямого доступа к памяти. При получении от микропроцессорного устройства 13 разрешения на прямой доступ к памяти (в ответ на сигнал "запрос захвата", запрашивающий центральный процессор о возможности использования системной шины) осуществляется высокоскоростной обмен данными между выходным регистром 7 и оперативной памятью микропроцессорного устройства 13.
В момент включения бортовой системы регистрации в нулевую секунду нулевой минуты выполняется только обмен между выходным регистром 7 и оперативной памятью без последующей обработки полетных данных. Начиная с первой секунды после того как микропроцессорное устройство 13 организует обмен посредством устройства 15 прямого доступа к памяти со следующей областью оперативной памяти, будет разрешена обработка данных, поступивших в предыдущем цикле. Порядок переключения начальных адресов двух областей оперативной памяти происходит согласно алгоритму работы микропроцессорного устройства 13.
Обработка и анализ полетных данных заключается в формировании в оперативной памяти микропроцессорного устройства 13 массива полетных данных, структура которого зависит от режима полета, в автоматическом распознавании режимов полета, случаев отказа авиационной техники и факторов нарушения летно-эксплуатационных ограничений. Далее осуществляется запись массива полетных данных и результатов анализа в блок 11 памяти. Процессором записи управляет контроллер сопряжения 12.
Микропроцессорное устройство 13 работает по следующему алгоритму [8]
массивы информации в запоминающих устройствах бортового устройства регистрации размещены следующим образом:
в постоянной памяти микропроцессорного устройства 13 массивы М1, М2, М3, константы А1, А2, А3, N1, N2, N, W, а также массивы-маски Z1 и Z2;
в оперативной памяти микропроцессорного устройства 13 массивы М4, М5, М8, М9, информационный кадр ИК и все переменные программы;
в блоке 11 памяти массивы-протоколы М6, М10, массив блоков данных М7, а также массив указателей М11.
Массив М1 предназначен для хранения последовательности триад, из которых образуются отношения вида НГ<АП<ВГ, где АП аналоговый параметр из массива М7 с порядковым номером N АП; НГ нижняя граница установленного диапазона; ВГ верхняя граница диапазона. Количество триад хранится в первом элементе массива М1.
Массив М2 предназначен для хранения номеров бинарных сигналов N БС. Бинарные сигналы хранятся в массиве М8. Количество бинарных сигналов содержит первый элемент массива М2.
Массив М3 предназначен для хранения информации об условиях выполнения полетного события или нарушения летно-эксплуатационных ограничений ЛЭО. Каждая запись, общее количество которых хранится в первом элементе массива М3, имеет переменную длину. Первый элемент записи содержит номер события N ЛЭО. Второй элемент время, необходимое для установления факта выполнения события, т. е. минимальное время его существования. Далее следуют пары, состоящие из аргумента и операции. Значение аргумента определяется по его номеру N ЭУ как значение одного из элементарных условий, которые могут храниться в массивах М4 или М6. Отрицательный номер ЭУ предполагает инверсию аргумента. Если абсолютное значение номера превышает некоторое, наперед заданное число, то в качестве ЭУ рассматривается событие с номером N  . Равенство номера операции единице означает выполнение логической операции "дизъюнкция", равенство двум - "конъюнкция", равенство нулю конец записи. Массив М4 предназначен для хранения значений элементарных условий. Значение ЭУ с порядковыми номерами, не превышающими общее количество триад в массиве М1, равно значению отношения в соответствующей триаде. Остальные ЭУ определены текущим состоянием бинарных сигналов в массиве М8.
. Равенство номера операции единице означает выполнение логической операции "дизъюнкция", равенство двум - "конъюнкция", равенство нулю конец записи. Массив М4 предназначен для хранения значений элементарных условий. Значение ЭУ с порядковыми номерами, не превышающими общее количество триад в массиве М1, равно значению отношения в соответствующей триаде. Остальные ЭУ определены текущим состоянием бинарных сигналов в массиве М8.
Массив М5 предназначен для хранения информации о текущем состоянии условий, определяющих выполнение полетных событий или нарушение ЛЭО. В исходном состоянии, а также в том случае, если условия данного события не выполняются, соответствующий элемент массива М5 имеет событие, равное 1-τ. При выполнении условий в М3 к содержимому соответствующего элемента М5 добавляется единица. Таким образом, значение элемента М5, превышающее ноль, говорит о состоявшемся событии или о факте нарушения ЛЭО.
Массив М6 предназначен для хранения протокола событий или нарушений ЛЭО. Состоит из триад. Первый элемент номер ЛЭО, второй время начала, третий - время окончания. Исходное состояние нулевое. Отрицательное время окончания означает, что была зафиксирована предпосылка события, не состоявшегося по значению параметра t. Формирование массива осуществляется в результате анализа полетных данных.
Массив М7 предназначен для хранения односекундных блоков данных, структура которых определяется режимом полета, чем достигается экономия вычислительных ресурсов бортового устройства регистрации полетных данных. В массив переносятся только значения аналоговых параметров.
Массив М8 предназначен для хранения текущих значений бинарных сигналов.
Массив М9 предназначен для хранения предыдущих значений бинарных сигналов. Исходное состояние нулевое.
Массив М10 предназначен для хранения протокола переключений бинарных сигналов. Состоит из триад. Исходное состояние нулевое. Первый элемент каждой триады N БС, второй время включения БС, третий время выключения. Значение БС определяется по состоянию знакового разряда соответствующего элемента массива М8. Рассмотрение протокола переключений БС вместо полного перечня БС позволяет съэкономить вычислительные ресурсы системы регистрации.
Массив М11 предназначен для хранения указателей о расположении односекундных блоков данных в массиве М7. Состоит из пар. Номер каждой пары совпадает со временем регистрации соответствующего блока данных. Первый элемент хранит длину участка массива М7, предшествующего данному блоку данных, что позволяет осуществить произвольную адресацию к блоку данных, соответствующему конкретному времени. Второй элемент содержит номер режима полета: 1 обычный полет, 2 специальный.
Массив ИК располагается в той области оперативной памяти микропроцессорного устройства 13, в которую с помощью устройства 15 прямого доступа к памяти была произведена запись данных из выходного регистра 7 в предыдущую секунду. Начальный адрес доступной для анализа области располагается в переменной.
Массивы Z1 и Z2 предназначены для хранения масок, определяющих структуру каждого блока данных в массиве М7. Представляют собой последовательность нулей и единиц. Единичное значение предполагает выборку соответствующего элемента ИК и его запись в массив М7 и соответствующего признака БС в массив М8.
А1 начальный адрес первой области памяти, предназначенной для хранения ИК;
А2 начальный адрес второй области;
А3 длина массива ИК;
N то же;
1 длина блока данных в 1-ом режиме полета;
2 длина блока данных во втором режиме полета;
W число, необходимое для различия типа аргумента в массиве М3: либо ЛЭО, либо ЭУ.
Общая структура алгоритма представлена блоками А1-А15. Блоком А2 осуществляется инициализация данных программы, заключающаяся в подготовке массивов М5, М6, М9 и М10. В блоке А3 выполняется подготовка механизма поочередного подключения к устройству 15 прямого доступа к памяти двух областей оперативной памяти микропроцессорного устройства 13. В том случае, если устройство 15 прямого доступа к памяти готово к обмену, то из микропроцессорного устройства 13 в устройство 14 прямого доступа к памяти передается начальный адрес одной из областей для размещения ИК и его длина - блок А6. В блоке А7 осуществляется переключение на другую область памяти для обмена в следующем цикле. В блоке А8 производится ввод данных в ИК через канал прямого доступа к памяти. Первый цикл обмена выполняется без последующего анализа ИК, которого еще нет в смежной области памяти. Начиная со второго цикла, в блоках А10-А13 осуществляется семантический анализ полетных данных. Анализ выполняется до тех пор, пока не будет выключен двигатель на земле, что может быть легко реализовано проверкой условия
(αруд = 0) ∧ ШВ,
где αруд положение ручки управления двигателем;
ШВ бинарный сигнал, соответствующий разовой команде "шасси выпушены".
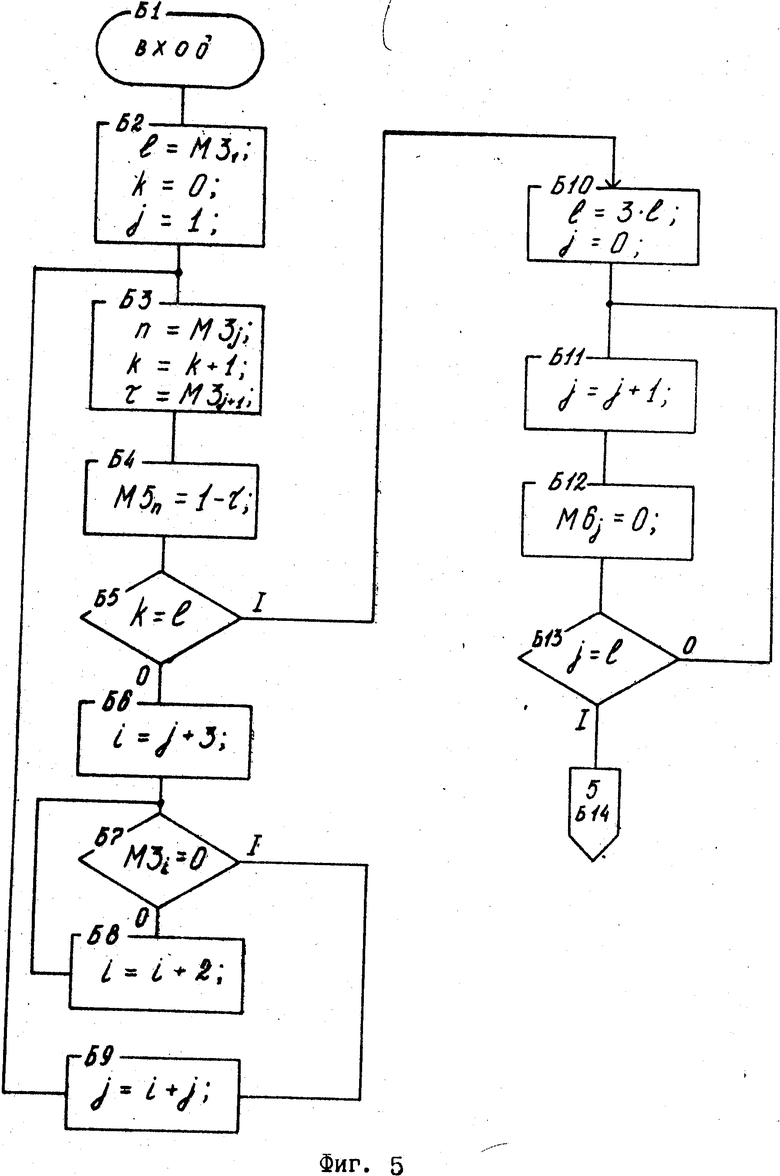
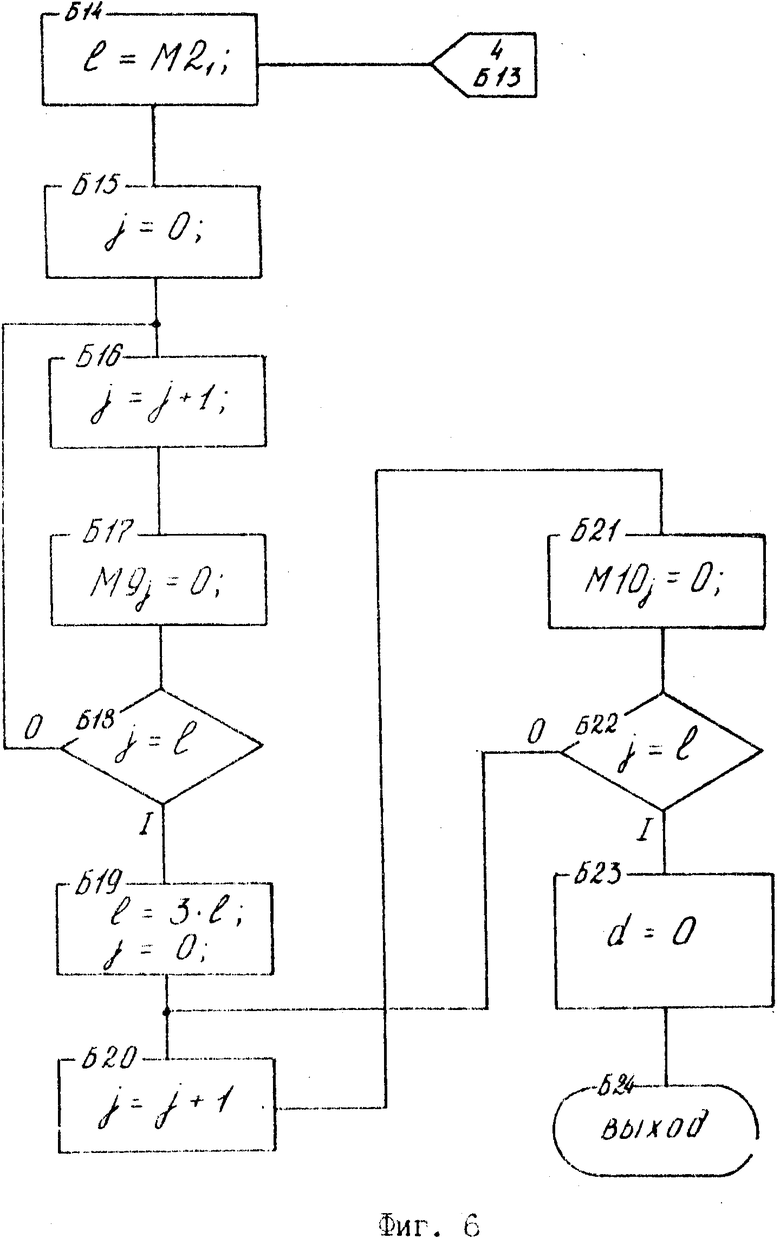
Инициализация данных осуществляется программой, описываемой алгоритмом на фиг.5 и 6.
В блоке Б2 переменные l, k и j принимают значения соответственно длины массива М3, изменяемой в записях, порядкового номера записи массива М3 и номера элемента массива М3. В блоке Б3 переменная n принимает значение N ЛЭО или события; номеру записи присваивается ее текущий номер; из второго элемента каждой записи выбирается значение параметра τ. Блок Б4 выполняет установку в исходное состояние соответствующего элемента массива М5. Если обработаны не все записи массива М3, то осуществляется переход к очередной записи посредством анализа второго элемента в каждой паре "аргумент- операция", что выполняется в блоках Б7 и Б8. Блоками Б10-Б13 осуществляется обнуление массива М6, блоками Б14-Б18 массива М9, блоками Б19-Б22 массива М10. В блоке Б23 обнуляется переменная, в которой будет накапливаться длина массива М7 при его формировании блоками данных.
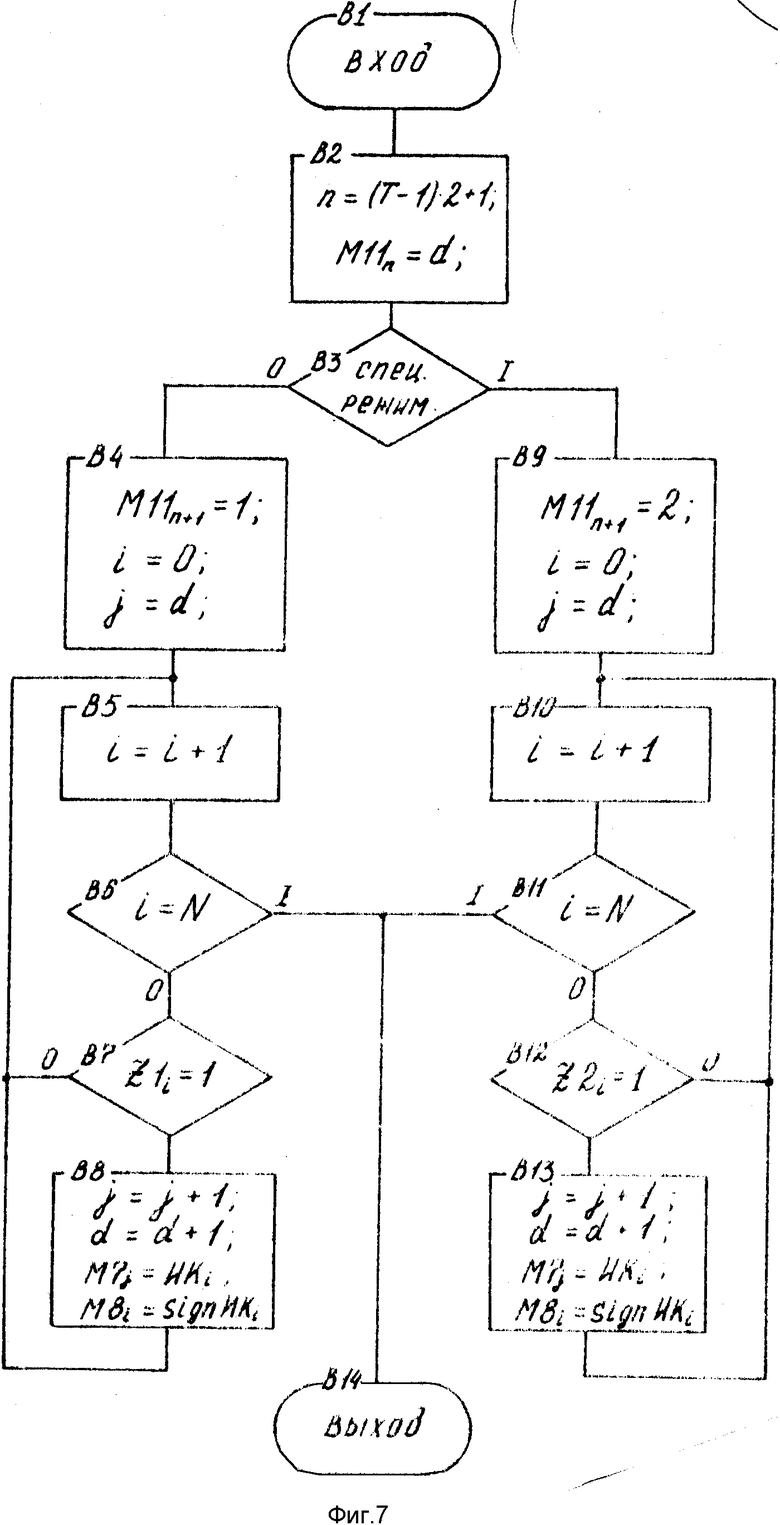
Для боевой авиационной техники существенны с точки зрения структуры полетных данных два режима полета: 1 обычный и 2 специальный. Для того, чтобы данные, соответствующие исключительно второму режиму, не перегружали блок данных в массиве М7 в обычном полете, целесообразно структуру блока данных менять. Информация о размещении блока данных и режиме, соответствующая любому моменту времени, хранится в массиве М11 в парах ячеек. Порядковый номер пары вычисляется исходя из значения текущего времени в блоке В2. Здесь же первому элементу пары присваивается адрес последнего элемента предыдущего блока данных или что одно и то же количество зарегистрированных данных во всех предыдущих блоках данных массива М7.
В зависимости от режима, что определяется в блоке В3, в блоках В4 или В9 вторым элементом пары фиксируется номер режима, подготавливаются индексы для обращения к массивам Z1 ил Z2, М7 и М8. В блоках В5 или В10 формируется текущий индекс обращения к маскам Z1 или Z2, а в блоках В6 или В11 осуществляется проверка его на недопустимость превышения установленных границ. В блоках В7 и В8 или В12 и В13 по единичному значению элемента маски осуществляется выборка данных из ИК с записью аналоговых параметров в блок данных массива М7, бинарных сигналов в массив значений БС М8 и осуществляется подсчет длины массива М7.
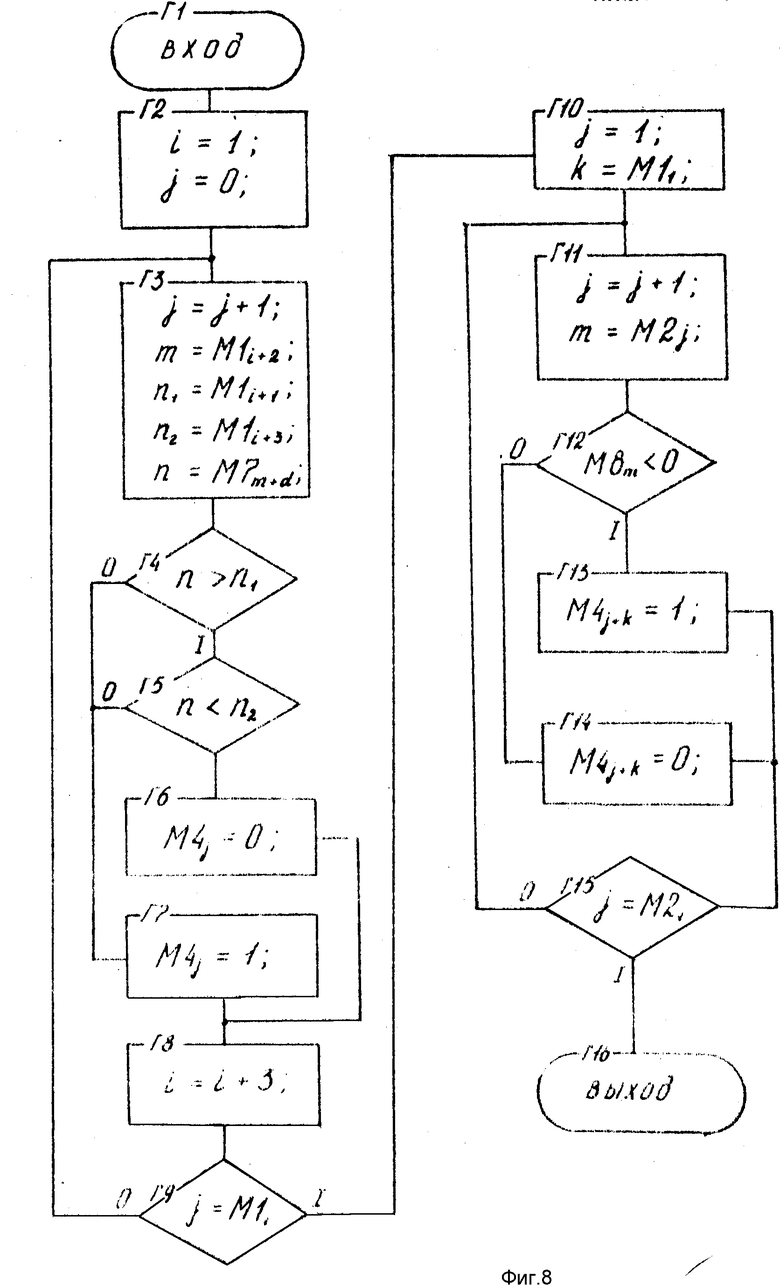
Формирование значений элементарных условий производится блоками Г1-Г16. ЭУ формируется в зависимости от результата отношения, содержащегося в массиве М1. Общее количество ЭУ равно сумме триад в массиве М1 и количества БС в массиве М2. В блоке Г2 выполняется подготовка индексов для обращения соответственно к элементам массивов М1 и М4. В блоке Г3 определяется индекс для выборки параметра из блока данных массива М7 и определяются текущие значения элементов триад. В блоках Г4-Г7 определяется факт выполнения или невыполнения отношения, в соответствии с которым текущему элементу массива М4 присваивается значение 1 или 0. В блоке Г8 выполняется модификация индекса для обращения к очередному элементу массива М1 и, если рассмотрены все триады, что выполняется блоком Г9, осуществляется переход к анализу текущего состояния БС. Результат этого анализа заносится в следующие по порядку элементы массива М4. В блоке Г11 формируется текущее значение индекса для обращения к элементам массива М2. В блоке Г12 осуществляется проверка состояния БС. В блоках Г13 или Г14 фиксируется состояние БС. Блок Г15 определяет момент завершения просмотра БС.
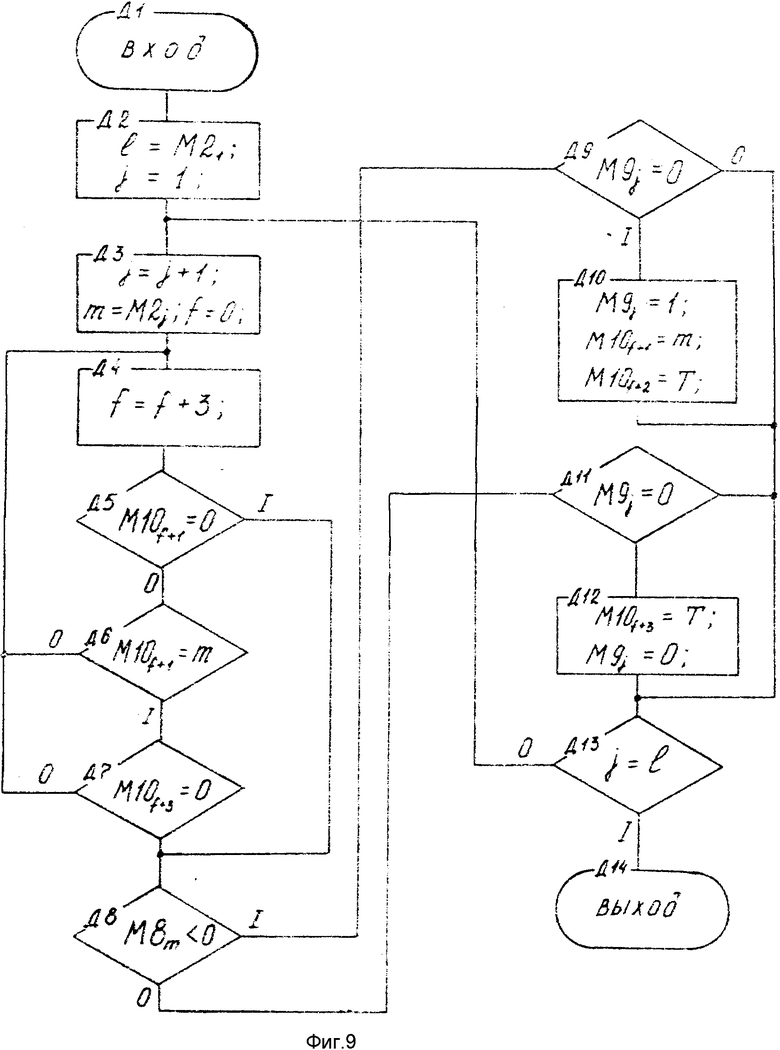
Протокол изменения БС формируется блоками Д1-Д14 и заносится в массив М10. Регистрация БС в отличие от ведения протокола требует значительных массивов данных под хранение БС, изменение которых происходит сравнительно редко. С точки зрения рационального расходования памяти и удобства работы с БС целесообразно ведение протокола переключения БС. Для ведения протокола необходима информация о текущем положении БС это массив М8, а также информация о предыдущем состоянии БС массив М9.
В блоке Д2 устанавливается граница поиска в массиве М2, устанавливается начальное значение индекса для обращения к элементам массива М2. В блоке Д3 формируется текущее значение индекса для обращения к массивам М2 и М9, определяется номер БС и устанавливается начальное значение индекса обращения к протоколу. В блоках Д4-Д7 отыскивается место для новой записи в протоколе или незавершенная запись для БС с выбранным номером. Блоки Д8 и Д9 или Д8 и Д11 устанавливают факт переключения БС и в случае его нового появления в блоке Д10 фиксируется время появления БС и его номер, а также изменяется содержание элемента М9. В случае пропадания БС в блоке Д12 фиксируется время, а также изменяется содержание элемента М9. Блок Д13 определяет момент окончания анализа БС.
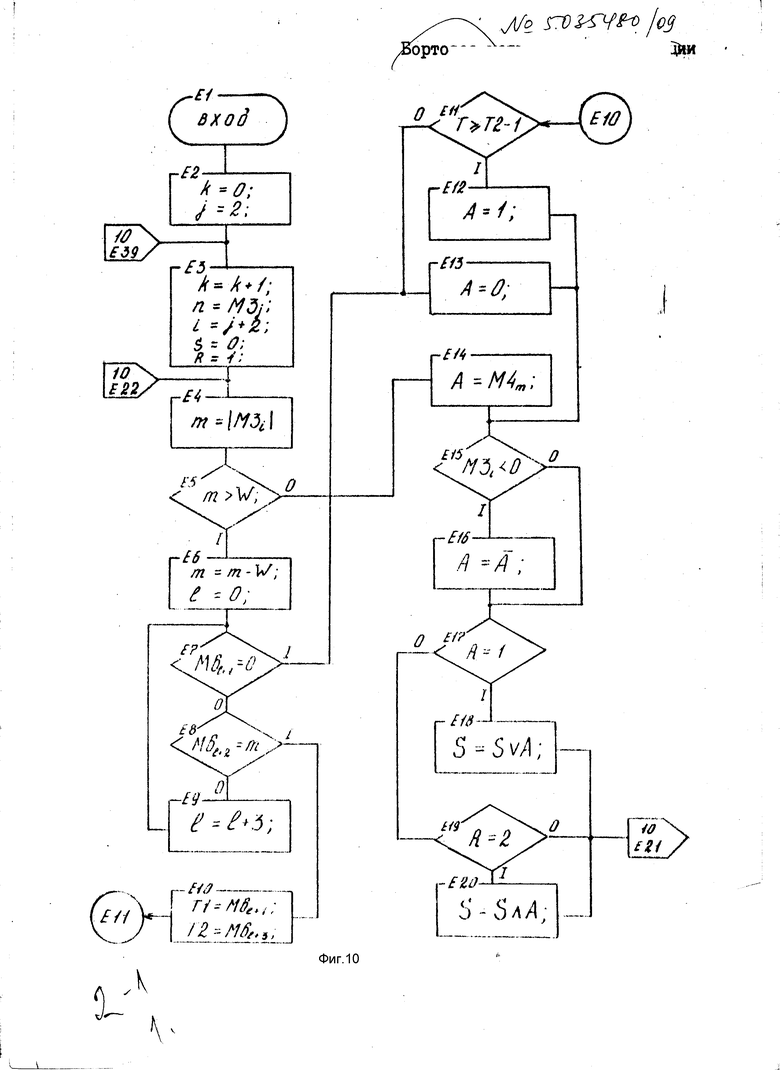
В блоках Е1-Е40 выполняются операции по вычислению значений логических функций, определяемых записями массива М3, выявлению факта наступления события или нарушения ЛЭО в зависимости от условий, включая и время t существования, и производятся записи в протокол-массив М6.
В исходном состоянии, а также в случае невыполнения условий элементы массива М5 имеют значения 1-t.
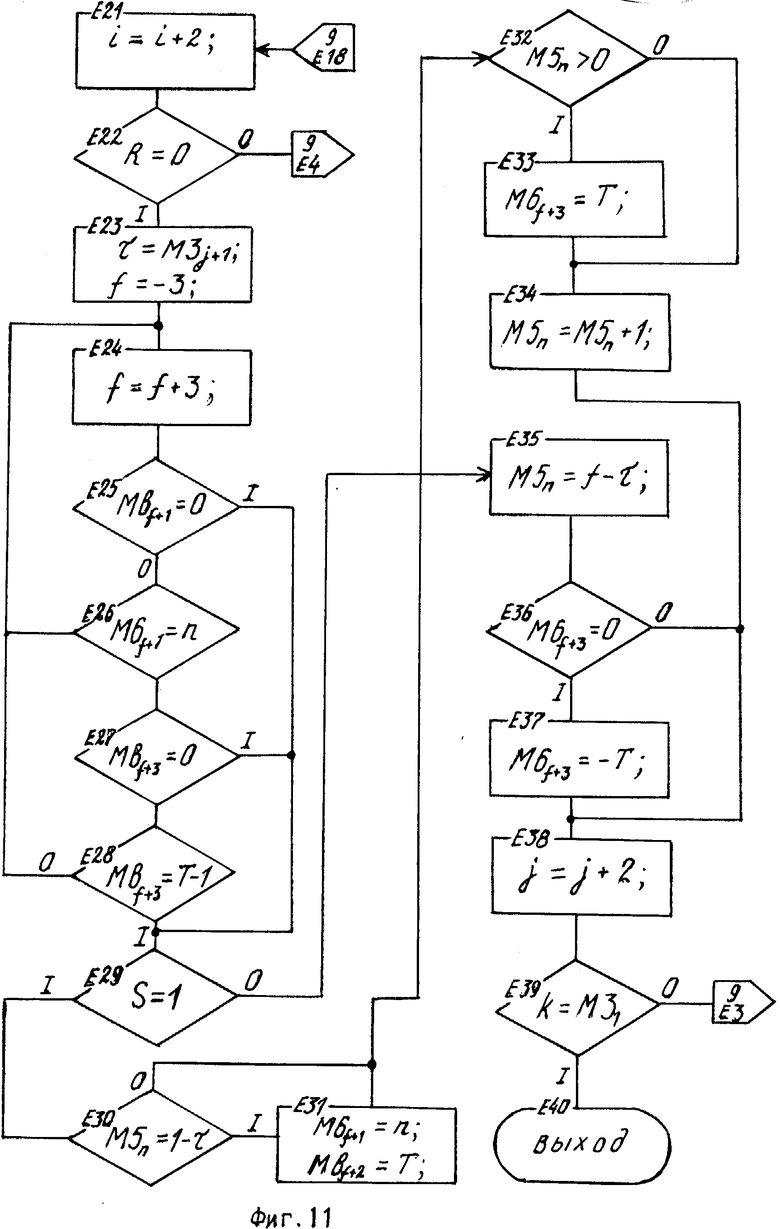
Блок Е2 обнуляет счетчик номеров записей массива М3 и устанавливает в исходное состояние индекс для обращения к элементам массива М3. Блок Е3 подсчитывает номер очередной записи в массиве М3, определяет номер события, индекс для выборки элементарного условия ЭУ, устанавливает исходный результат вычисления логического условия и исходную операцию. Блок Е4 вычисляет абсолютное значение номера ЭУ. В том случае, если блок Е5 установит, что номер ЭУ есть номер события или ЛЭО, то блоками Е6-Е13 определяется факт существования к данному моменту времени события или ЛЭО с данным номером. Блок Е14 осуществляет выборку аргумента, являющегося результатом анализа триад в массиве М1 или БС в массиве М8. Блоки Е15 и Е16 реализовывают операцию "инверсия", блоки Е17 и Е18 операцию "дизъюнкция", блоки Е19 и Е20 - операцию "конъюнкция". В блоке Е21 осуществляется переход к определенной паре "аргумент-операция". Если блоком Е22 будет обнаружена нулевая операция, то из массива М3 в блоке Е23 выбирается параметр t подготавливается индекс для поиска в протоколе. В блоках Е24-Е28 осуществляется поиск в протоколе новой записи или незавершенной записи для данного номера события.
В том случае, если условия, кроме t выполняются, что проверяется блоком Е29, и в блоке Е30 установлено, что это происходит впервые, то в протоколе открывается новая запись с фиксацией номера события или ЛЭО и времени. В случае каждого выполнения условий в блоке Е34 к содержимому соответствующего элемента массива М5 добавляется единица, но как только значение элемента массива М5 превысит ноль, в блоке Е33 в протокол будет сделана запись о времени выполнения условия, что при невыполнении условия будет означать время окончания события. Если блоком Е29 будет установлено невыполнение условий, то в блоке Е35 восстанавливается исходное значение массива М5. Если событие существовало, но в течение времени, меньшем t, это устанавливается путем анализа в блоке Е36 в протоколе фиксируется отрицательное значение текущего времени, что говорит о предпосылке к событию.
Блок Е38 модифицирует индекс для перехода к новой записи. Переход или завершение просмотра осуществляется по санкции блока Е39.
Таким образом, при проведении межполетного контроля отпадает необходимость в проведении анализа полетных данных, который уже выполнен на борту. Посредством использования массива указателей М11 обеспечивается произвольный доступ к блоку данных любого момента времени полета. События, представляющие интерес для летного состава и специалистов инженерной авиационной службы, сведены в протокол. Запись результатов анализа полетных данных в энергонезависимый блок 11 памяти обеспечивает их сохранность при выключении питания и снятия блока 11 памяти с борта ЛА. Перезапись информации на промежуточный носитель необязательна, что исключает возможные случаи потери информации.
Применение изобретения позволяет повысить достоверность информации и сократить время ее обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ РАЗДЕЛЕНИЯ ИЗОТОПОВ УРАНА ЦЕНТРОБЕЖНЫМ МЕТОДОМ В ШТАТНЫХ И АВАРИЙНЫХ СИТУАЦИЯХ | 2003 |
|
RU2250509C2 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 1997 |
|
RU2115165C1 |
| КАРДИОГРАФ | 1991 |
|
RU2093068C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ НАВЕДЕНИИ НА ВОЗДУШНУЮ ЦЕЛЬ | 1999 |
|
RU2189556C2 |
| ТРЕХКООРДИНАТНЫЙ ПРИВОД | 2001 |
|
RU2239906C2 |
| СПОСОБ ДЛЯ ЦИФРОВОЙ СУБСТРАКЦИОННОЙ АНГИОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043073C1 |
| Архитектура параллельной вычислительной системы | 2016 |
|
RU2644535C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2093856C1 |
| Процессор | 1984 |
|
SU1200294A1 |
Использование: в вычислительной технике для регистрации и контроля входных параметров, а именно параметров полета летательного аппарата. Сущность изобретения: бортовая система регистрации полетных данных содержит блок 1 датчиков полетных параметров, коммутаторы 2, 3, и 4, аналого-цифровой преобразователь 5 и преобразователь частоты в код 6, выходной регистр 7, генератор импульсов 8, делитель частоты 9, счетчик 10, блок 11 памяти, контроллер сопряжения 12, микропроцессорное устройство 15 прямого доступа к памяти. Цель изобретения - повышение достоверности информации и сокращение времени обработки. 11 ил.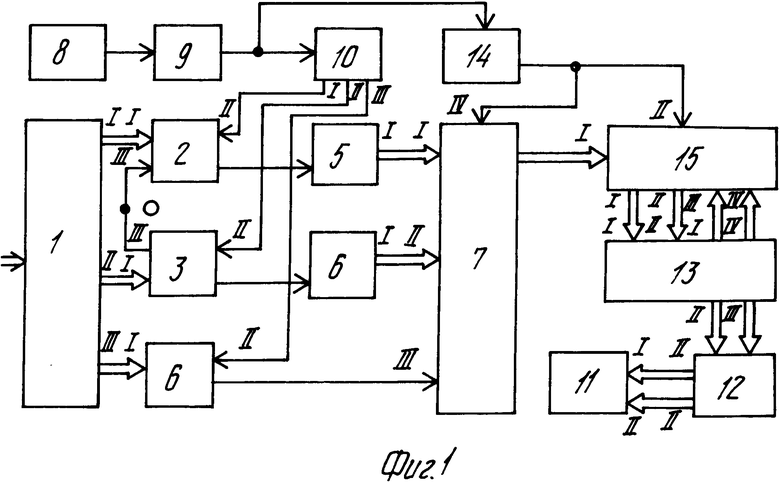
Бортовая система регистрации полетных данных, содержащая блок датчиков полетных параметров, первый, второй и третий коммутаторы, аналого-цифровой пребразователь, преобразователь частоты в код, выходной регистр, генератор импульсов, делитель частоты, счетчик, причем первая, вторая и третья группы выходов блока датчиков полетных параметров соединены с первыми группами информационных входов соответственно первого, второго и группой информационных входов третьего коммутаторов, управляющие входы которых соединены с первым, вторым и третьим выходами счетчика, вторые группы информационных входов первого и второго коммутаторов соединены с шиной приведения к нулю, выходы первого и второго коммутаторов соединены соответственно с входами аналого-цифрового преобразователя и преобразователя частоты в код, группа выходов которых соединена соответственно с первой и второй группами информационных входов выходного регистра, третий информационный вход которого соединен с выходом третьего коммутатора, выход генератора импульсов соединен через делитель частоты с входом счетчика, отличающаяся тем, что в него введены блок памяти, контроллер сопряжения, микропроцессорное устройство, линия задержки и устройство прямого доступа к памяти, первая группа входов которого соединена с группой выходов выходного регистра, второй вход устройства прямого доступа к памяти соединен через линию задержки с выходом делителя частоты, первая и вторая группы выходов устройства прямого доступа к памяти соединены соответственно с первой и второй группами входов микропроцессорного устройства, а третья и четвертая группы входов устройства прямого доступа к памяти соединены соответственно с первой и четвертой группами выходов микропроцессорного устройства, вторая и третья группы выходов которого соединены соответственно с первой и второй группами входов контроллера сопряжения, первая и вторая группы выходов которого соединены соответственно с первой и второй группами входов-выходов блока памяти, выход делителя частоты соединен с входом линии задержки, входы блока датчиков полетных параметров являются входами системы, выход линии задержки соединен с управляющим входом выходного регистра.
| Бортовое устройство регистрации полетных данных | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Бортовое устройство регистрации полетных данных | |||
| Шифр "Тестер УЗ-Л" | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
