Изобретение относится к определению параметров метеорологически обусловленного состояния водной поверхности с помощью акустических волн разных диапазонов частот, а точнее - с использованием способов дистанционного зондирования, и наиболее эффективно может быть использовано при оперативном определении характеристик таких типов подстилающей поверхности, как ледяной покров в осенний и весенний периоды в районах морского судоходства, а также ледяного покрова в регионах залегания и добычи месторождений газа и нефти на шельфе арктических морей.
Известен способ определения состояния ледяного покрова (см. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение. / Йоханнессен О.М., Александров В.Ю., Фролов И.Е. и др., СПб., Наука, 2007, с.68-71), заключающийся в выполнении визуальных ледовых наблюдений с самолетов и вертолетов различных типов с высот 100-600 м. При полетах на этих высотах разрешающая способность человеческого глаза принимается равной 0,1 м на местности, что позволяет наблюдателю определять по характеру поверхности снежного покрова, типу наслоений и торосистых образований, толщине льдин в разломах, размерам и форме снежниц, цветовым оттенкам поверхности льдин, их обломков, дна снежниц все основные характеристики ледяного покрова - положение кромки дрейфующего и неподвижного льдов, сплоченность льда, его возрастной состав, формы, наслоенность и торосистость, стадии таяния, пространства чистой воды среди льдов, высоту и характер снежного покрова, сжатие, загрязненность, количество и формы льдов материкового происхождения. При этом, наблюдения выполняются в полосе от 19-20 высот полета (кромки льда, границы зон различной сплоченности) до 2-3 высот (возрастной состав), что объясняется различной достоверностью и возможностью определения тех или иных характеристиках при больших углах визирования. Учитывая ограниченное время пролета каждого участка, совершенно очевидна невозможность переработки наблюдателем всего объема информации. На основании результатов наблюдений составляется рабочая ледовая карта. Способ отягощен существенными случайными и систематическими погрешностями, ограничениями по полосе обзора. Кроме того, при наблюдениях с малых высот непосредственно просматривается только 10-20% обследуемой акватории, что приводит к значительным ошибкам при интерполяции и экстраполяции границ.
Известен также способ аэрофотосъемки морского льда (см. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение. / Йоханнессен О.М., Александров В.Ю., Фролов И.Е. и др., СПб., Наука, 2007, с.72-76) с использованием аэрофотоаппаратов (АФА). Съемка выполняется сериями по площадям или маршрутам.
Достоинством данного способа является высокая разрешающая способность, геометрическая определенность снимков, позволяющая воссоздать пространственную модель местности и с высокой степенью точности определить координаты изобразившихся точек местности, а также объективность и однозначность получаемых сведений.
Недостатком способа является зависимость от метеоусловий и освещенности; большое количество получаемых снимков и сложность их фотохимической и фотограмметрической обработки; ограниченные площади съемки с малых высот; низкая оперативность получения окончательных результатов.
Известен также способ определения состояния ледяного покрова путем зондирования морских льдов посредством радиолокационных станций с длиной волны 2-3 см (см. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение. / Йоханнессен О.М., Александров В.Ю., Фролов И.Е. и др., СПб., Наука, 2007, с.79-88), установленных на самолетах и судах. При этом состояние льда определяется через эффективную площадь рассеивания. Данный способ позволяет выполнить оперативную оценку состояния ледяного покрытия, в части возрастных стадий льдов и их сплоченности по градациям (молодые - однолетние - старые льды). Однако при этом невозможно определение стадий развития однолетних льдов.
Известны также способы определения ледяного покрова путем зондирования морских льдов с искусственных спутников Земли (см. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение. / Йоханнессен О.М., Александров В.Ю., Фролов И.Е. и др., СПб., Наука, 2007, с.88-116 или см. Авторское свидетельство СССР №1788487), заключающиеся в том, что ледяной покров зондируют посредством бортовой аппаратуры спутника (радиолокатор бокового обзора, пассивный микроволновый радиометр, многоканальный сканирующий радиометр с линейным сканированием по сфере или по углу). Для получения достоверной информации, как правило, используют сочетание нескольких приборов, что связано с отрицательной корреляцией интенсивности излучения и рассеяния электромагнитных волн льдом одного и того же возраста на используемых частотах в зимний период года. На изображениях радиолокационных станций старые (двухлетние и многолетние) льды дают сильный рассеянный сигнал, а на изображениях радиометрических приборов - слабое собственное излучение. Молодые и однолетние льды, наоборот, дают слабый рассеянный сигнал и сильное собственное излучение. Именно эта особенность совмещенных изображений при комплексировании данных позволяет распознать однолетний и многолетний льды в период интенсивного летнего таяния, открытую воду на крупных разводьях и полыньях, а также положение кромки льдов при взволнованной открытой водной поверхности.
В известном способе определения состояния ледового покрова (см. Авторское свидетельство СССР №1788487), включающим получение спутниковых радиолокационных снимков и снимков в оптическом диапазоне длин волн, с целью повышения достоверности при определении возраста и сплоченности льда в весенне-осенний период, в момент получения радиолокационных снимков устанавливают наличие облачности теплых фронтальных зон по снимкам в оптическом диапазоне длин волн и, если она имеет место, то проводят повторную радиолокационную съемку в условиях, соответствующих полному изменению метрологических условий в исследуемом районе.
В известных способах в процедурах картирования применяется метод визуального анализа и интерпретации изображений, включая количественные оценки общей и частной сплоченности льда, а также интерактивного выделения границ ледовых зон с использованием мозаик из разновременных изображений. При этом мозаики формируются из предварительно нормализованных по яркости и трансформированных в стереографическую картографическую проекцию изображений с радиолокационной станции.
Основной недостаток радиолокационных станций бокового обзора, заключающийся в том, что разрешение вдоль линии пути ограничивается длиной антенны, компенсируется применением радиолокаторов с синтезированной апертурой. Однако для идентификации морских льдов и получения устойчивых результатов картирования морских льдов необходимо выбирать различные комбинации поляризаций типа АР, НН, HV, VV, VH при разных диапазонах углов зондирования.
Наиболее важными параметрами морских льдов являются сплоченность, возраст (толщина), размер ледяных полей, размер и ориентация разводий, торосистость, дрейф льда и зоны сжатия/разряжения, стадии таяния и ряд других. Параметры морских льдов по спутниковым радиолокационным изображениям определяются путем дешифрирования. Для обнаружения и опознавания используются такие признаки, как величина обратного рассеяния и текстура, а также структура, размер и форма объектов. Основным прямым дешифровочным признаком является яркость радиолокационного изображения, которая определяется коэффициентом обратного рассеяния воды и морских льдов. На основе различий их обратного рассеяния определяются основные виды льдов. Зависимость удельной эффективной площади рассеяния и тона изображения от вида льда, его форм и шероховатости поверхности делает возможным определение ряда параметров морских льдов.
Однако различные виды льдов могут изображаться одинаковым тоном и текстурой. Для их распознания используют дополнительную информацию, такую как гидрометеорологические условия и дрейф льдов в предшествующий съемке период, другие данные дистанционного зондирования, ледовые наблюдения с судов и т.д. Априорные данные о ледовых условиях также накладывают ограничения на возможность появления различных видов льдов в отдельных районах.
Обратное рассеяние морских льдов зависит от поляризации, частоты и угла зондирования радиолокатора. На радиолокационных изображениях С-диапазона многие виды льдов изображаются одинаково на различных поляризациях и углах зондирования. Например, для ниласа характерен темный тон изображения; для многолетних льдов - более яркий тон по сравнению с однолетним льдом, а для торосистых по сравнению с ровными льдами. Сигнатуры некоторых других видов льдов и открытой воды могут значительно различаться. Так значения обратного рассеяния открытой водной поверхности при слабом волнении и тонкого льда на VV-поляризации превышают на 5-7 и 2-3 дБ соответственно значения на НН-поляризации. Для интерпретации РСА - изображений, полученных со спутников типа ERS, RADARSAT, ENVISAT, сигнатуры основных видов морских льдов требуют уточнения с учетом конкретных характеристик этих радиолокаторов. Анализ результатов спутниковых дистанционных зондирований (см. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение. / Йоханнессен О.М., Александров В.Ю., Фролов И.Е. и др., СПб., Наука, 2007, с.213-214) показал, что обнаруживаются наиболее крупные айсберги (диаметром 150 м и более), в то время как большинство из них не идентифицируется. При соответствующих условиях (при удельной эффективной площади рассеяния, больше чем у морского льда и спокойной морской поверхности) возможно обнаружить около половины небольших айсбергов (15-60 м в диаметре), три четверти средних айсбергов (60-120 м). При картировании малых айсбергов по изображениям с РСА появляется большое количество ложных объектов.
При регулярном сборе данных РСА высокого разрешения объем получаемой информации значительно возрастает. И визуальная интерпретация этих изображений, и оценка параметров морских льдов становятся весьма трудоемкими. Алгоритмы определения параметров морских льдов по РСА-изображениям включают (см. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение. / Йоханнессен О.М., Александров В.Ю., Фролов И.Е. и др., СПб., Наука, 2007, с.216-235) классификацию морских льдов, сплоченность морских льдов, дрейф морских льдов, составление ледовых карт по изображениям в оптическом диапазоне и по РСА-изображениям. Целью классификации является отнесение пикселов РСА-изображения к различным категориям морских льдов. Используемые при этом категории главным образом связаны с возрастными видами льдов и деформацией их поверхности. Толщина льдов не определяется по РСА-изображениям. Корректная классификация является важной предпосылкой для оценки таких параметров морских льдов, как их сплоченность, распределение полыней и их формы. Классификация включает предварительную обработку изображений, выделение ледовых объектов, вычисление параметров изображений (сегментов), пиксельную или зонную классификацию с использованием набора вычислительных параметров, завершающий этап обработки.
Предварительная обработка изображения включает в себя радиометрическую и геометрическую коррекции, фильтрацию, подавление спекл-шума и улучшение контрастности и предназначена для обеспечения относительной или абсолютной калибровки изображений и удаления различных артефактов. При проведении радиометрической калибровки в отдельных случаях необходимо выполнить коррекцию диаграммы направленности антенны, ослабления сигнала по дальности, а также от угла наклона, используя известные параметры РСА. При классификации РСА-изображений с широкой полосой обзора также необходимо учитывать угловую зависимость коэффициента обратного рассеяния морских льдов. Для уменьшения этого эффекта может быть применена нормализация на изменение дальности с использованием эмпирических зависимостей для преобладающего на изображении вида льда. Однако это требует априорных знаний о преобладающем на изображении типе льда и не может полностью компенсировать радиометрические зависимости для других типов поверхностей на изображении.
При классификации изображения без обучения, имеющей целью выделение различных кластеров в пространстве признаков без их отнесения к заранее выбранным классам льдов, требуется только инвариантность радиолокационной сигнатуры объекта от его расположения в пределах того же изображения.
Сегментация является процессом, который разделяет изображение на составляющие части или объекты. Сегмент представляет собой участок изображения с однородными тоновыми и текстурными свойствами. Сегменты изображения могут соответствовать таким объектам, как поля льда, каналы, полыньи, участки деформационного льда. Известные алгоритмы сегментации предназначены для обнаружения ледяных полей на фоне открытой воды или ледяной каши и распознавания полыней. Фундаментальной трудностью задачи сегментации является ее существенная размытость и неопределенность.
Используемые признаки РСА-изображений принадлежат к трем основным группам: моменты изображения, текстура матрицы смежности тонов и признаки на основе автокорреляционной функции (многолетний лед характеризуется пятнистой структурой изображения, которая объясняется формированием на его поверхности большого количества снежниц в летний период; другим примером является сеть ярких линейных участков изображения, соответствующих грядам торосов на деформированном однолетнем льду). Текстура зависит от пространственного разрешения радиолокатора, пространственного масштаба неоднородностей на поверхности морских льдов и в его объеме. В настоящее время имеется мало информации о крупномасштабных свойствах морских льдов и, как следствие, механизмах формирования текстуры. Набор информативных признаком может отличаться от исследования к исследованию и может зависеть от нескольких факторов, включая географический район, окружающие условия и т.д. Применение текстуры обычно повышает точность классификации, однако не может в полной мере устранить неоднозначности между различными видами льда:
70-120 см - ровный однолетний лед средней толщины;
>120 см - деформированный средний и толстый однолетний лед, торосистость 2-3 балла;
>120 см - деформированный средний и толстый однолетний лед, торосистость 3-5 балла;
10-15 см (серый) и 15-30 см (серо-белый) - молодой лед;
5-10 см - нилас, ледяное «сало», пространства открытой воды.
Ввиду того, что алгоритм классификации построен на основе линейного дискретного анализа с использованием нейронных сетей для аппроксимации сложных зависимостей между входными и выходными сигналами, способы с использованием признаков РСА-изображений отягощены как объективными, так и субъективными погрешностями. В настоящее время не существует общедоступного набора спутниковых данных, который мог бы быть использован для перекрестной проверки различных алгоритмов. Разработанные алгоритмы обычно включают использование знаний эксперта, которые трудно воспроизвести. Сезонная и пространственная изменчивость свойств морских льдов является препятствием для развития общих подходов, применимых в различные сезоны и в различных полярных районах.
Открытая вода и морские льды имеют широкий диапазон величин обратного рассеяния, которые значительно варьируются в зависимости от скорости ветра и свойств льда, а также от длины волны РСА, угла зондирования и поляризации. Например, обратное рассеяние открытой воды при слабом ветре значительно ниже, чем у льда. В таблице приведены значения разности обратного рассеяния от открытой воды в зависимости от сезона.
Спокойная водная поверхность в большинстве случаев уверенно различается от многолетнего и однолетнего льдов. Однако в конце лета их разделение может быть затруднено, и даже в период начала ледообразования и зимой вновь образующиеся начальные виды льда и нилас могут иметь схожее со спокойной водой обратное рассеяние. Обратное рассеяние открытой водной поверхности возрастает с увеличением скорости ветра и при скорости ветра 2 м/с достигает характерных для морского дна значений. При ее последующем увеличении до 5 м/с обратное рассеяние водной поверхности становится выше, чем у большинства видов льда. Летом морской лед имеет низкое обратное рассеяние (менее чем 12 дБ), и при скорости ветра больше 5 м/с разность величин обратного рассеяния морского льда и открытой воды превышает 4 дБ.
Среди полей дрейфующего льда обратное рассеяние взволнованной водной поверхности ниже, чем в океане, из-за сглаживания волн и затенения ветра ледяными полями. Поэтому при скоростях ветра в диапазоне 3-10 м/с надежное различение водной поверхности и льда по одноканальным радиолокационным данным невозможно (VV-поляризация). При НН-поляризации при углах зондирования 20-50 градусов обратное рассеяние открытой воды меньше, чем при VV-поляризации, что повышает достоверность оценки за счет увеличения различия обратного рассеяния между льдом и спокойной водой. Однако распознавание спокойной водной поверхности и морских льдов в среднем и дальнем диапазонах полосы обзора затруднено, поскольку обратное рассеяние водной поверхности может быть ниже уровня шумов РСА, а обратное рассеяние морских льдов уменьшается с увеличением угла зондирования. Начальные виды льда и нилас имеют относительно низкое обратное рассеяние и не различаются от открытой воды.
Основными этапами алгоритма определения сплоченности льдов являются:
Вычисление гистограммы изображения и определение значений σ0 min и σ0 max.
1. Классификация каждого пиксела, имеющего значение pij, как лед, если
σ0 min≤pij≤σ0 max, и открытая вода, если pij<σ0 min или pij>σ0 max.
2. Вычисление сплоченности морских льдов в пределах прямоугольных участков классифицированного изображения размером m×n пикселов путем усреднения.
Оценки сплоченности морских льдов зависят от выбора значений порогов обратного рассеяния (σmin и σmax), которые могут варьироваться в зависимости от ветра, сезона и географического района.
При использовании метеорологических данных выявляются случаи, когда сигнатуры льда и воды могут быть схожими и принадлежность пиксела к одной из этих категорий не определяется.
Наличие спекл-шума на РСА-изображении может привести к классификации некоторых пикселов водной поверхности как льда. Для уменьшения спекл-шума изображение усредняется; при этом размер пиксела увеличивается, например от 12,5 до 100 м.
Вычисление сплоченности льда по РСА-изображениям со спутника основано на пороговой классификации. Вначале каждый пиксел помечается как лед или открытая вода, а затем сплоченность льда в процентах вычисляется в окне размером m×n пикселов.
Коррекция зависимости обратного рассеяния от дальности необходима.
Все пикселы с величиной ниже пороговой классифицируются как лед, а остальные как вода.
Общим недостатком известных способов является низкая достоверность оперативного определения характеристик из-за невозможности (в ряде случаев) однозначно отличить взволнованную водную поверхность от разреженного многолетнего льда, спокойную водную поверхность от тонких сплоченных молодых типов льда (например, ниласа), смешанные поля льдов разных возрастных категорий от многолетнего льда, лед, на поверхности которого находится свежевыпавший снежный покров, от молодых льдов и др.
Известен способ определения состояния ледяного покрова (см. авторское свидетельство СССР №1788487), в котором в отличие от других известных способов, заключающихся в построении фотоизображений подстилающей поверхности, соответствующих результатам зондирования с аэрокосмических носителей, осуществляемом, например, радиолокатором бокового разрешения (длина волны около 3 см) и определении характеристик подстилающей поверхности экспертным путем (визуальным анализом) полученных фотоизображений, определение состояния ледяного покрова выполняют путем получения спутниковых радиолокационных снимков и снимков в оптическом диапазоне длин волн, а в момент получения радиолокационных снимков устанавливают наличие облачности теплых фронтальных зон по снимкам в оптическом диапазоне длин волн. При этом, если такая облачность имеет место, то проводят повторную радиолокационную съемку в условиях, соответствующих полному изменению метеорологических условий в исследуемом районе.
В общем случае этот способ не обеспечивает достоверное определение характеристик поверхности при изменяющихся сложных метеорологических условиях и в условиях быстрой изменчивости отражательных и излучаемых характеристик подстилающей поверхности. Это объясняется тем, что общая зависимость принятых сигналов радиолокационной станции бокового обзора и радиометра от параметров ледяного покрова является достаточно сложной, так как в пределах элемента разрешения каждого прибора находятся смешанные поля льдов разного возраста, а система уравнений для оценки эффективности площади рассеяния, определяемой по радиолокационной станции бокового обзора и эффективной радиояркостной температуры, определяемой по радиометру содержит четыре неизвестных и соответственно четыре непостоянных параметра, что оказывается неразрешимой задачей для определения значений искомых параметров, а именно частной сплоченности, в пределах разрешения соответственно радиолокатора бокового обзора и радиометра. Устранение данного недостатка в этом способе решается путем использования карт состояния ледового покрова за предшествующую декаду месяца, которые строятся в Гидрометеорологическом центре по обобщенным данным ледовой авиаразведки для арктического бассейна. При этом на текущие изображения, полученные по полям соответственно радиолокационным и радиометрическим способом, наносят вручную контуры однородных состояний ледяного покрова, соответствующие предыдущим картам-схемам. Далее выполняют идентификацию областей с однородными состояниями ледяного покрова. После того, как полностью идентифицированными оказались одна или две области на текущем изображении поверхности и предыдущих картах-схемах, определяют направление и среднюю величину смещения между этими областями. С учетом полученных значений среднего смещения и направления, границы предшествующего положения областей, занесенные на текущую информацию, смещают для более точного соответствия. Данную операцию необходимо выполнять ввиду того, что на изображениях с текущей информацией некоторые области перестают различаться, в то время как на предыдущей карте-схеме они могут различаться. Причинами этого являются ситуации, заключающиеся в нарастании присутствующего в пределах области молодого льда (от нилоса к серому льду), отражательные характеристики которого становятся близкими к характеристикам многолетнего льда, изменении частичной сплоченности многолетнего льда из-за появления ветровых трещин и разводий или выпадении на поверхность нескольких областей многолетнего льда влажного снега. Для однозначно опознанных областей выполняется расчет характеристик ледяного покрова, т.е. определение частной сплоченности льдов разного возраста.
При выполнении идентификации с использованием нескольких карт-схем при переносе изображений необходимо учитывать масштабы карт, т.е. выполнять генерализацию новых карт, в противном случае возможны существенные искажения изображений, а в некоторых случаях и потеря информации.
Способ имеет высокую трудоемкость как при обработке вновь полученной информации, так и информации, предшествующих наблюдений.
Кроме того, необходимо учитывать проявление маскирующего эффекта в арктических районах, который определяется скоростью изменения метеорологических условий, а также изменение условий дрейфа льда, что требует повторения операций способа через несколько часов, особенно при резком изменении пространственного распределения гидрометеорологических параметров.
И если при проведении масштабных исследований в арктическом регионе данный способ имеет применимость при составлении прогноза развития ледовой обстановки в сочетании с использованием информации, полученной от других источников информации (гидрометеорологические станции, суда гидрографической службы и т.п.), то для обеспечения безопасной эксплуатации морских терминалов нефтегазовых месторождений в арктической зоне его эффективность не является достаточной.
Задачей заявляемого технического решения является повышение достоверности определения состояния ледяного покрова.
Поставленная цель достигается за счет того, что в способе определения состояния ледяного покрова, включающем получение спутниковых радиолокационных снимков в оптическом диапазоне длин волн, анализ и интерпретацию изображений, интерактивное выделение границ ледовых зон с использованием мозаик из разновременных изображений, в котором при определении возраста и сплоченности льда выполняют томографическую съемку ледяного покрова, толщину льда и морфографические аномалии подводной части ледяного образования определяют посредством параметрического гидроакустического измерителя путем зондирования ледового образования линейными частотно модулированными импульсами.
Совокупность новых отличительных признаков, заключающихся в том, что при определении возраста и сплоченности льда выполняют томографическую съемку ледяного покрова, толщину льда и морфографические аномалии подводной части ледяного образования определяют посредством параметрического гидроакустического измерителя путем зондирования ледового образования линейными частотно модулированными импульсами, из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «изобретательский уровень».
Одним из существенных преимуществ параметрических гидроакустических антенн является их широкополосность. При этом на всех частотах сохраняется одинаковая направленность в режиме излучения. Такие широкополосные источники звука весьма полезны при изучении отражательных свойств ледовых образований. С их помощью, используя одну антенну, можно измерять акустические характеристики практически во всем диапазоне рабочих частот. Исследования могут выполняться оперативно вплоть до измерения амплитудно-частотной характеристики за одну посылку при использовании зондирующих линейных частотно модулированных импульсов. Последнее обстоятельство особенно важно при непрерывно изменяющихся морских условиях измерений.
В гидролокации величину эхо-сигнала, отраженного от подводного объекта, принято характеризовать силой цели. Измерения частотных зависимостей силы цели с применением параметрических гидроакустических локаторов для исследования отражательных свойств объектов возможно выполнять в широком частотном диапазоне.
Для акустически жестких объектов сферической формы величина силы цели в промежуточной области между релеевским и геометрическим рассеяниями, т.е. в области, где 1<ka<10 (а - радиус), k=2π/λ - волновое число, колеблется, асимптотически приближаясь к своему постоянному значению при ka>>1. Причина этих колебаний, как показали теоретические и экспериментальные исследования, заключаются в переизлучении поверхностных и дифрагированных волн, которые вносят свой вклад в процесс формирования эхо-сигнала наряду с зеркальным отражением. Возникшая интерференция между указанными типами волн при достаточной длительности зондирующих импульсов приводит к осцилляциям в частотных зависимостях силы цели.
Уровень этих осцилляций, количество, интервал частот между ними определяется физическими параметрами объекта, его геометрическими размерами. Этот факт предполагает возможным использовать в качестве одного из простых и достаточно информативных признаков классификации частотную зависимость силы цели.
С целью исследования возможности использования частотных зависимостей силы цели в качестве классификационных признаков были проведены измерения с помощью широкополосного параметрического источника. При этом в излучающем тракте параметрической гидроакустической локационной системы реализован двухканальный метод формирования исходных сигналов со средней частотой накачки 165 кГц. Диапазон разностных частот составлял 5-50 кГц. Перестройка частоты в указанном диапазоне осуществлялась как в течение длительности импульса по линейному закону, так и в режиме медленно меняющейся частоты от импульса к импульсу через 2, 4, 8 посылок. Шаг перестройки разностной частоты составлял 0,2 кГц.
Девиация разностной частоты прямого и отраженного сигнала составила 30-40 кГц. Разница коэффициентов усилителя приемного тракта для каналов прямого и отраженного импульса отличается на величину, равную расстоянию между объектами. Частота биений зависит от девиации частоты излучаемого сигнала и расстояния между объектами. Таким образом, по форме отраженного линейного частотно-модулированного сигнала можно различать одиночную и групповую цели и оценивать расстояние между элементами групповой цели при расположении объектов на расстояниях, меньших длительности зондирующего импульса.
Ввиду того, что характер чередований максимумов и минимумов, а также абсолютные значения силы цели и интервал частот между минимальными и максимальными значениями силы цели в данном диапазоне частот являются различными, это позволяет различать эти объекты по их частотным характеристикам, а также оценивать размер этих сфер по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях (Клей К., Медвин Г. Акустическая океанография. Основы и применения. - М.: Мир, 1980, 580 с.).
Совпадение огибающих отраженных сигналов от ледяных образований с их частотными зависимостями дает возможность за одну посылку судить о частотных характеристиках отражающих элементов ледяного образования. По характеру частотных зависимостей силы цели элементов ледяного образования можно различать одиночные объекты (кили) от групповых при их расположении на расстоянии, величина которого составляет меньше половины длительности зондирующего импульса.
Метод когерентного импульсного протонного спинового эха позволяет исследовать физико-химические свойства морской воды на молекулярном уровне.
Сущность предлагаемого технического решения поясняется чертежами.
Фиг.1. Архитектура реализации способа, которая включает добычную платформу 1, морской терминал 2, ледовые поля 3, автономные донные станции 4, летательный аппарат 5. Автономные донные станции 4, летательный аппарат 5, морской терминал 2 оснащены гидроакустическими средствами 6, включающими также каналы гидроакустической связи. Летательный аппарат 5 оснащен спин - протонным зондом 7, который также может быть установлен на ледовом поле 3 посредством парашютной системы. Летательный аппарат 5 может быть также оснащен электронно-оптической и инфракрасной системами и видеокамерами. Передача изображений может передаваться на расстояние до 100 км. Аналогом летательного аппарата является беспилотный комплекс ледовой разведки типа "Дозор", способный взлетать как с катапульты судна, например ледокола, или с добычной платформы. Скорость полета аппарата составляет до 200 км/ч, и он может находиться в полете до 8 часов (Робот исследует льды // Пресс Регион Плюс, №1, февраль, 2009, СПб, с.4).
Добычная платформа 2 также оснащена метеорологическим локатором 8 и спутниковым каналом связи 9.
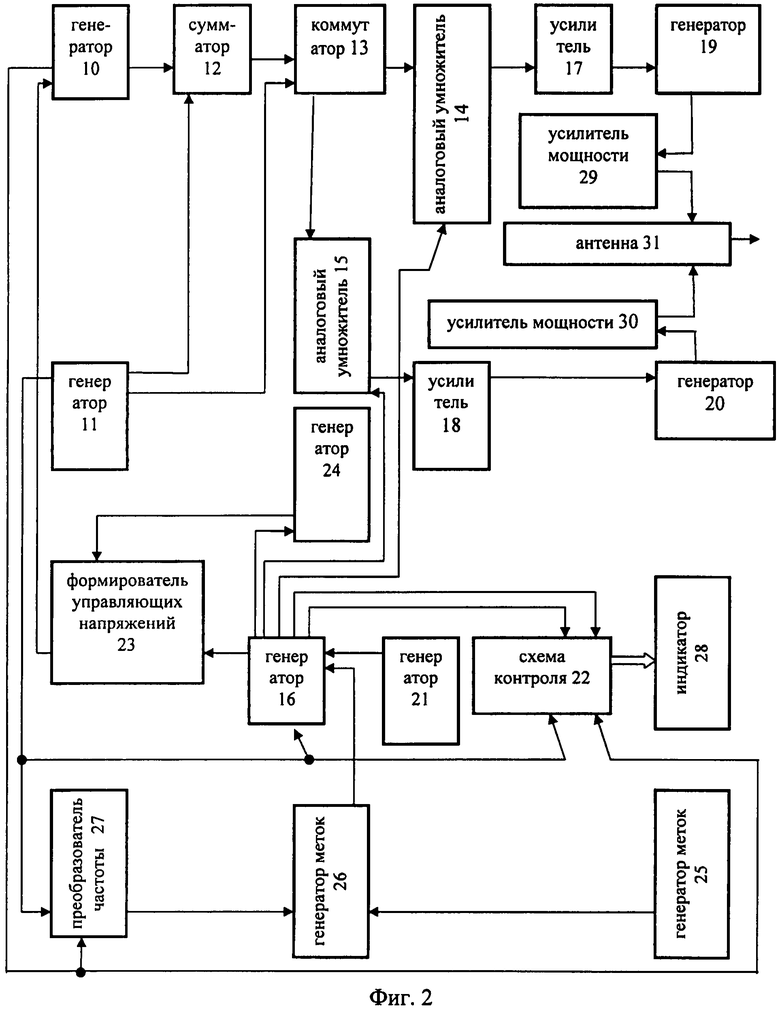
Фиг.2. Структурная схема формирователя сигналов накачки излучающего тракта акустического измерителя 6.
Излучающий тракт акустического измерителя состоит из генераторов 10, 11, управляемых напряжением, сигналы синусоидальной формы с частотами соответственно ω1 и ω2 подаются на входы сумматора 12 и коммутатора 13. С выхода сумматора 12 сигнал в виде биений также поступает на коммутатор 13. С выхода коммутатора 13 синусоидальные сигналы или биения через аналоговые умножители 14, 15, управляемые импульсным генератором 16, подаются на регулируемые выходные усилители 17, 18, с выходов которых, усиленные до необходимой величины, подаются соответственно на выходные разъемы генераторов 19, 20. Импульсный генератор 21, для обеспечения привязки по фазе начала и конца излучения к нулю биений, синхронизируется сигналами генераторов 19 и 20. По приходу запускающего импульса импульсный генератор 21 вырабатывает прямоугольные импульсы, соответствующие уровням ТТЛ, и пилообразный импульс, равный по длительности прямоугольному. Амплитуда пилообразного импульса постоянна и не зависит от его длительности. Кроме того, импульсный генератор 16 генерирует сигнал в виде прямоугольных импульсов, который подается на специализированную схему контроля 22. Управление частотами генераторов 10 и 11 осуществляется с помощью формирователя управляющих напряжений 23, на вход которого подается либо пилообразный импульс, либо ступенчато изменяющееся напряжение, генерируемое генератором 24 ступенчато-изменяющегося напряжения, работа которого синхронизируется импульсным генератором 16. Для нанесения частотных меток при записи частотных характеристик на ленте самописца служит генератор меток 26, на входы которого подаются опорная частота с кварцевого генератора меток 25 и синусоидальный сигнал с частотой, равной мгновенной разностной частоте, снимаемой с преобразователя частоты 27. Контроль необходимых параметров осуществляется схемой контроля 22, с выхода которой код измеренной величины подается на панель семисегментных светодиодных индикаторов 28.
С выходов формирователя сигналов накачки поступают на широкополосные усилители мощности 29, 30, работающие в импульсном режиме на активную нагрузку 30 Ом и обеспечивающие электрическую мощность 3 кВт, излучаемую антенной 31.
Преобразователем накачки является плоская двухрезонансная антенна мозаичного типа. Антенна набрана из элементов пьезокерамики ЦТС-19 и ЦТСНВ-1 с резонансными частотами 150 и 180 кГц.
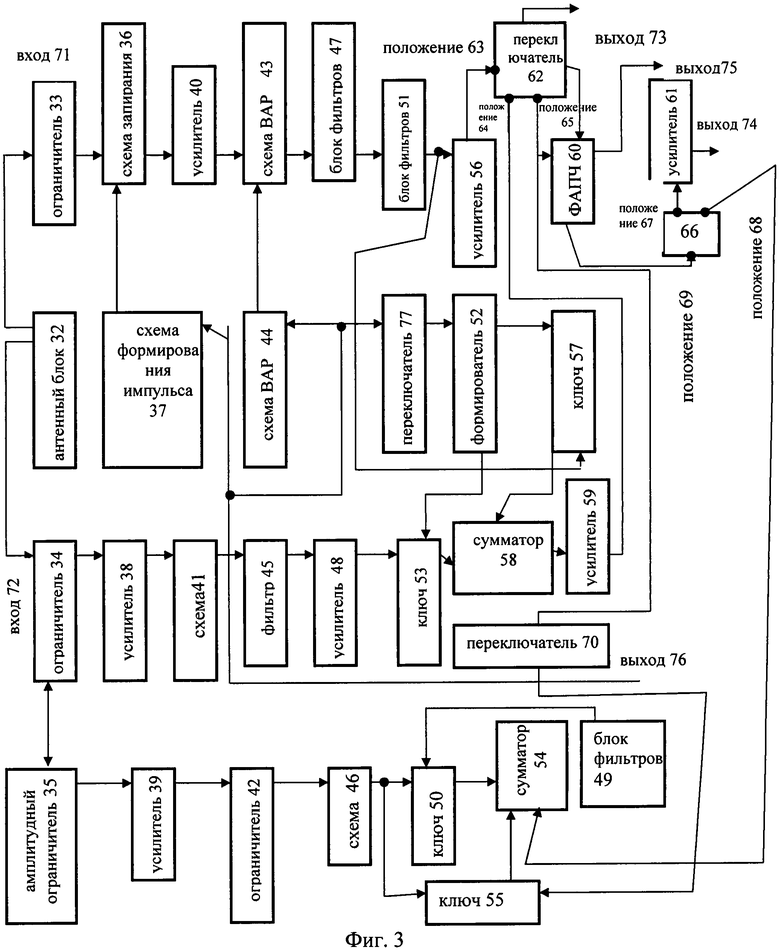
Фиг.3. Блок-схема приемного тракта включает антенный блок 32, амплитудные ограничители 33 и 34 для сильных входных сигналов, амплитудный ограничитель 35, схему запирания 36, схему формирования импульса 37, усилители 38, 39 и 40 с регулируемым коэффициентом усиления, схему преобразования частоты заполнения 41, усилитель ограничитель 42, схемы ВАРУ 43 и 44, фильтр нижних частот 45, схему формирования видеосигнала метки 46, блоки фильтров верхних частот 47 и 49, усилитель 48, два ключа 50 и 55, блок фильтров низких частот 51, формирователь импульсов 52, ключи 53 и 57, сумматор 54, согласующий усилитель 56, ключ 57, сумматор 58, усилитель 59, ФАПЧ 60, согласующий усилитель 61, переключатель 62 на три положения 63, 64, 65 соответственно, переключатель 66 на три положения 67, 68, 69 соответственно и переключатель 70.
Приемный тракт имеет два входа 71 и 72, соответственно низкочастотного и высокочастотного сигналов, и четыре выхода 73, 74, 75 и 76. Выход 73 является выходом низкочастотных сигналов, выход 74 обеспечивает связь с регистратором, выход 75 является выходом разностной частоты F, выход 76 является выходом импульса запуска.
Антенный блок 32 содержит широкополосную антенну, резонансную, низкочастотную и высокочастотную антенны. Основной приемной антенной является широкополосная приемная антенна, которая представляет собой цилиндрический гидрофон, помещенный в конический отражатель из пенопласта. Гидрофон набран из трех цилиндрических преобразователей из керамики ЦТСНВ-1 с тангенциальной поляризацией. Цилиндры соединены между собой последовательно и склеены по торцам. Размеры активной части гидрофона составляют 35 мм в диаметре и 100 мм высотой. Размеры антенны 300 мм в диаметре и 160 мм высотой. Чувствительность в диапазоне 5-50 кГц - 1 мВ/Па, с неравномерностью не хуже минус 3 дБ. Диаграмма направленности на частоте 10 кГц составляет 30 градусов. Коэффициент усиления составляет 28 дБ, динамический диапазон 80 дБ, уровень шумов, приведенных ко входу, в диапазоне 50 кГц не более 4 мкВ. Наряду с широкополосной антенной к приемному тракту подключены резонансная, низкочастотная и высокочастотная антенны. С антенн сигнал поступает в приемник, в котором он усиливается и обрабатывается, после чего подается на регистрирующие и измерительные приборы. Приемник содержит три канала: низкочастотный канал и два канала регистрации эхо-сигналов с частотами накачки. Низкочастотный канал состоит из функциональных блоков 33, 36, 40, 43, 47, 51, 56. Принимаемый низкочастотный сигнал подается на вход амплитудного ограничителя для сильных входных сигналов 33, с которого сигнал поступает на схему запирания 36 входа приемника на временной промежуток Δt≥τимп, где τимп, - длительность импульса. Схема формирования 37 импульса управления синхронизирована передним фронтом импульса запуска. Сигнал с выхода формирователя поступает на управляющий вход ключа 36. После ключа сигнал усиливается в усилителе 40 с регулируемым коэффициентом усиления и подается на схему ВАРУ 43. На другой вход схемы ВАРУ 43 подается сигнал управления, сформированный схемой формирования сигнала ВАРУ 44 и соответствующий одному из законов изменения коэффициента пропускания от времени (101gt, 201gt, 301gt и 401gt). После схемы ВАРУ низкочастотный сигнал разностной частоты F проходит через набор фильтров нижних 51 и верхних 47 частот. С выхода фильтров сигнал поступает на согласующий усилитель 56.
Первый канал регистрации эхо-сигналов с частотами накачки состоит из блоков 34, 38, 41, 45, 48, в котором после амплитудного ограничителя 34 эхо-сигналы усиливаются усилителем с регулируемым коэффициентом усиления 38 и поступают на схему преобразования частоты заполнения 41. Здесь частота заполнения импульсов (она равна частотам накачки) преобразуется в разностную частоту, генерируемую в данный момент времени в воде. Далее сигнал фильтруется от высокочастотных продуктов преобразования фильтром нижних частот 45 и усиливается усилителем 48.
Второй канал регистрации эхо-сигналов с частотами накачки состоит из блоков 35, 39, 42, 46, 50, 49, 54, 55. Входной сигнал поступает на амплитудный ограничитель 35, после чего усиливается в усилителе с регулируемым коэффициентом усиления 38. С выхода усилителя 38 сигнал поступает на вход усилителя-ограничителя 42 и после нормирования уровня подается на пороговую схему формирования видеосигнала метки 46. С выходов пороговой схемы сигналы поступают на два ключа 54 и 55. Ключ 54 выполняет роль модулятора непрерывного сигнала (с частотой заполнения, необходимой для работы регистрирующих и обрабатывающих устройств) видеосигналом с выхода схемы формирования 46. Ключ 55 построен таким образом, что запрещает приход низкочастотного сигнала низкочастотного канала, преобразованного системой фазовой автоподстройки частоты (ФАПЧ) 60 на сумматор 54 на время прихода сигнала метки. Таким образом, сумматор 54 осуществляет суммирование сигнала метки и сигнала, принятого низкочастотным каналом.
Наличие трех разных каналов на частоте накачки позволяет решать задачи, связанные с определением, посредством локации характеристик таких сложных объектов, как структура и конфигурация подводной части ледяных полей.
Функциональная схема приемника построена таким образом, что позволяет реализовать как раздельную работу каждого из каналов с выходом как на аппаратуру регистрации и обработки, так и совместную.
Система ФАПЧ 60 позволяет организовать селективный синхронный прием для медленно меняющихся по частоте принимаемых сигналов, а также реализовать автоматическое преобразование сигналов разностной частоты в рабочую частоту аппаратуры регистрации и обработки сигналов.
При самостоятельной работе низкочастотного канала сигнал с выхода усилителя 56 поступает непосредственно на вход низкой частоты, с которого низкочастотный сигнал используется для анализа частотного спектра узкополосного или широкополосного сигналов. Этот же сигнал поступает через переключатель 62 на вход системы ФАПЧ 60, с выхода которой подается либо на ключ 55, либо после усиления в согласующем усилителе 61 на выход для подключения регистрирующей аппаратуры. Этот режим работы предусматривает возможность усиления, регистрации, индикации, измерения и обработки принимаемых сигналов только разностной частоты. Переключатели 62 и 66 находятся при этом в положении 63 и 67 соответственно.
Самостоятельная работа первого канала регистрации эхо-сигналов с частотами накачки позволяет принимать, усиливать и регистрировать сигналы накачки параметрического гидролокатора. При этом сигнал с выхода канала проходит дополнительно ключ 53, сумматор сигналов 58 и усилитель 59. После системы ФАПЧ 60 и усилителя 61 он поступает на выход для подключения регистрирующей аппаратуры. При этом переключатель 77 находится в разомкнутом состоянии, исключая при этом влияние узлов 52 и 57. Переключатели 62 и 66 находятся в положении 64 и 68 соответственно, обеспечивая нормальное прохождение сигнала к системе ФАПЧ 60 и согласующему усилителю 61.
Отдельная работа второго канала регистрации эхо-сигналов с частотами накачки позволяет принимать и регистрировать эхо-сигналы волн накачки параметрического гидролокатора. В отличие от первого канала регистрации эхо-сигналов с частотами накачки, позволяющего получать реальную локационную обстановку на частотах накачки, второй канал при зондировании границы водная поверхность - атмосфера и водная поверхность - лед позволяет отмечать кромки границ, регистрация которых на низких частотах (разностной частоте) не всегда возможна из-за особенностей акустических характеристик на границах раздела поверхностей. При этом протяженность отметки кромок вне зависимости от длительности излучаемого импульса, которая может быть значительной при низких частотах, укорачивается в схеме формирования метки 46. В конечном итоге линия границ прописывается на регистраторе в виде тонкой однотонной линии. Переключатель 70, при этом, находится в разомкнутом состоянии.
При совмещенных режимах работы каналов приемника, что обеспечивается соответствующими состояниями переключателей, подключающих ту или иную группу соответствующих блоков, реализуются режим совместной регистрации границ раздела поверхностей сигналом накачки и эхо-сигналами на разностной частоте и режим сдвоенной посылки и параллельной регистрации локационной обстановки на частотах накачки и на разностной частоте.
Формирователь сигналов накачки и излучающего тракта представляет собой аппаратурно-программный комплекс синтезатора сигнала накачки и обеспечивает задание, ввод, корректировку значений параметров генерируемого сигнала в интерактивном режиме и генерацию сигналов накачки с заданными значениями параметров.
Синтезатор сигналов накачки генерирует сигналы в диапазоне частот 5-200 кГц с плавным изменением частоты. Кроме двухкомпонентного сигнала возможно формирование многокомпонентного сигнала накачки с количеством компонент до 10. При этом осуществляются амплитудная и частотная модуляция компонент. На выходе синтезатора, выходное сопротивление которого не превышает 600 Ом, формируется биполярный сигнал с амплитудой 5 В.
Аппаратурная часть синтезатора сигналов содержит персональную ЭВМ типа IBM, совместимую с подключенным к ней специализированным интерфейсным блоком. На ПЭВМ реализованы ввод параметров и расчет мгновенных значений сигнала накачки. Массив мгновенных значений сигналов накачки передается в интерфейсный блок, где преобразуется в непрерывный аналоговый сигнал, являющийся выходным сигналом формирователя.
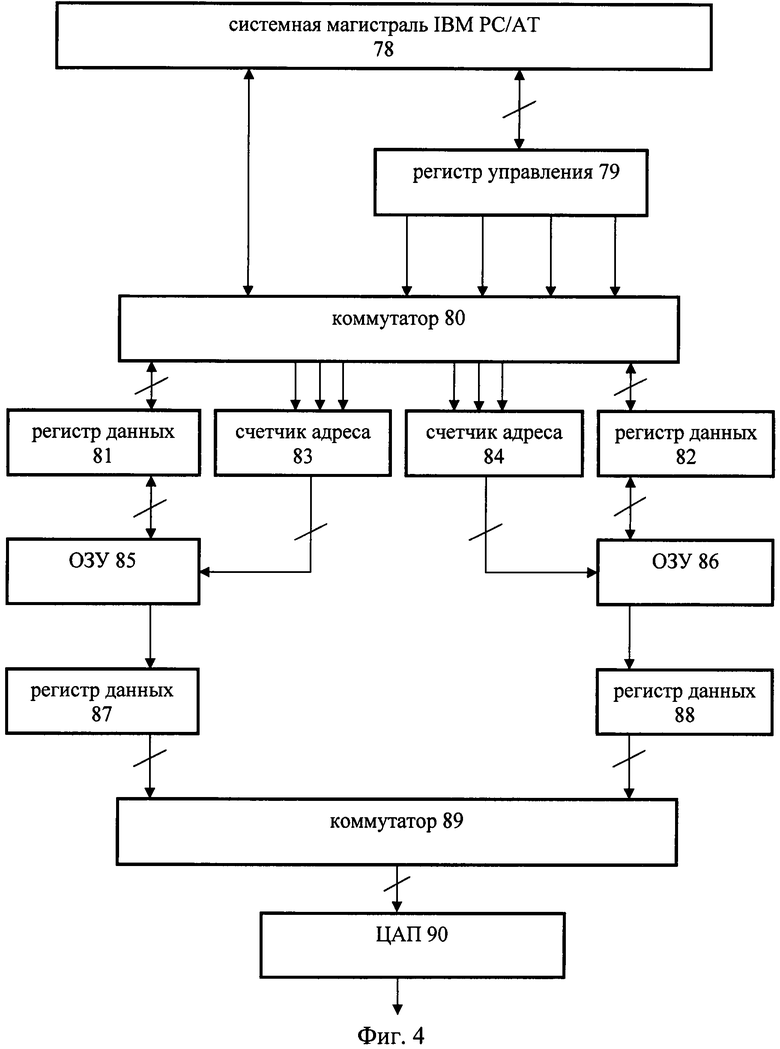
Фиг.4. Блок-схема интерфейсного блока включает системную магистраль IBM PC/AT 78, регистр управления 79, коммутатор 80, регистры данных 81 и 82, счетчики адреса 83 и 84, два ОЗУ 85 и 86, регистры данных 87 и 88, коммутатор 89, ЦАП 90.
Связь с ПЭВМ с интерфейсным блоком осуществляется по системной магистрали через два порта ввода-вывода с адресами 100h и 102h. Порт с адресом 100h является 16-разрядным и служит для обмена данными между интерфейсным блоком и ПЭВМ. Порт с адресом 102h выполнен 8-разрядным и является регистром управления работой интерфейсного блока.
В состав программного обеспечения входят программные модули, основными из которых являются SINTEZ.EXE, ll.REZ, MODEL.TPU, TST.MOD.
Для функционирования программного обеспечения в состав ПЭВМ входит центральный процессор типа 80486. Объем оперативной памяти не менее 640 Кбайт. Монитор типа EGA/VGA. Операционная система DOC версии не менее 4.0.
Посредством аппаратурно-программного обеспечения осуществляется расчет массива мгновенных значений выбранного типа сигнала с заданным набором параметров и пересылка их в ОЗУ интерфейсного блока. При этом размер массива соответствует длительности реализации сигнала 10 мс.
При окончании расчета и пересылки в один из ОЗУ 85, 86 текущей 10-милисекундной реализации модулируемого сигнала один из ОЗУ переключается на вывод сигнала в ЦАП 90, а другой ОЗУ из режима вывода переключается на прием массива мгновенных значений следующей 10-милисекундной реализации сигнала. Таким образом, расчет и запись в ОЗУ текущей реализации совмещается во времени с выводом предыдущей реализации сигнала.
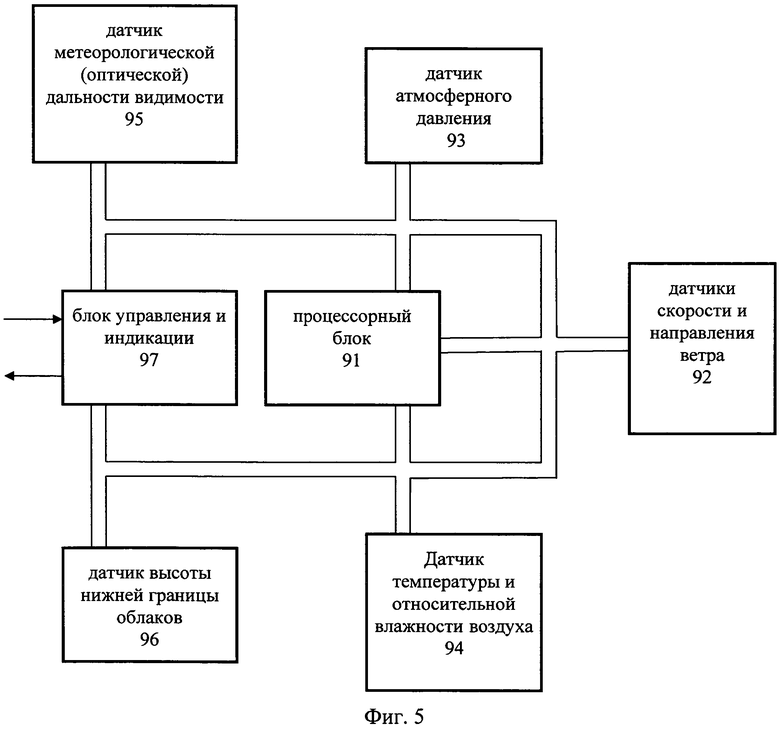
Фиг.5. Блок-схема метеорологического локатора 8 содержит процессорный блок 91, датчики скорости и направления ветра анемометрические 92, датчик атмосферного давления 93, датчики температуры и относительной влажности воздуха 94, датчик метеорологической (оптической) дальности видимости 95, датчик высоты нижней границы облаков 96, блок управления и индикации 97.
Метеорологический локатор 8 предназначен для получения, обработки, регистрации, отображения следующей информации:
- гидрометеорологических параметров окружающей среды;
- метеорологической информации от метеорологических искусственных спутников (МИСЗ) типа «Метеор», «NOAA» в виде снимков подстилающей поверхности и облачного покрова Земли;
- факсимильной и телеграфной информации от радиометеорологических центров.
Аппаратные и программные средства метеорологического локатора 8 обеспечивают измерение, вычисление, отображение и регистрацию следующих гидрометеорологических параметров окружающей среды:
- скорости кажущегося ветра;
- направления кажущегося ветра;
- скорости истинного ветра;
- направления истинного ветра;
- атмосферного давления;
- температуры воздуха;
- относительной влажности воздуха;
- высоты нижней границы облаков;
- метеорологической (оптической) дальности видимости.
Метеорологический локатор обеспечивает прием сигналов в формате APT от метеорологических ИСЗ в диапазоне от 135 до 138 МГц с шагом перестройки частоты 0,01 МГц, обработку и отображение принятой информации, получение и обработку факсимильной (в формате FAX) и телеграфной (в формате RTTY) гидрометеорологической информации, принимаемой спутниковым каналом связи от передающих радиометеорологических центров.
Прием, обработка, накопление, регистрация и отображение спутниковой, факсимильной и телеграфной метеорологической информации, а также массива данных гидрометеорологических параметров осуществляется с помощью вычислительных средств устройства приема и отображения информации со следующими техническими характеристиками:
- тактовая частота процессора, МГц, не менее 300;
- объем оперативной памяти, не менее 128 Мбайт;
- объем видеопамяти, не менее 16 Мбайт;
- объем носителя информации на жестком диске, не менее 4.1 Гбайт;
- объем носителя информации на гибком диске 1.44 Мбайт;
- звуковая плата;
- сетевая плата.
Интерфейсы метеорологического локатора 8 включают:
- 6 последовательных портов RS-232/422;
- 1 параллельный порт (LPT);
- порт PS/2 для подключения манипулятора трекбол.
Процессорный блок 91 представляет собой настенный приборный шкаф, обеспечивающий энергоснабжение датчиков скорости и направления ветра 92, датчика атмосферного давления 93, датчиков температуры и относительной влажности воздуха 94, датчика метеорологической (оптической) дальности видимости 95, а также обеспечивает прием текущей информации от вышеуказанных датчиков и от датчика высоты нижней границы облаков 96, обрабатывает и выдает ее для визуального отображения оператору на прибор управления и индикации 97.
Датчик скорости и направления ветра 92 содержит измерительный преобразователь и два анемометрических измерительных датчика: скорости ветра (анемометр) и направления ветра (флюгер). Датчик скорости ветра состоит из трехчашечной крыльчатки, вращаемой ветром. На одной оси с крыльчаткой установлен перфорированный диск с отверстиями, который при вращении крыльчатки перекрывает луч света оптоэлектронного преобразователя. Частота импульсов, формируемых оптоэлектронным преобразователем, пропорциональна скорости вращения крыльчатки.
Чувствительный элемент датчика направления ветра - флюгер, ориентирующийся по направлению ветра. На оси вращения установлен перфорированный диск с отверстиями. Оптоэлектронный преобразователь снимает отсчет углового положения диска с шагом 5,6° и выдает цифровой код положения флюгера в виде кода Грея. Измерительный преобразователь преобразует дискретные отсчеты в линейноизменяющийся ток для токовых измерительных каналов скорости и направления ветра в процессорном блоке 91.
Датчик скорости и направления ветра 92 содержит нагревательный элемент, который включается посредством термореле при понижении температуры ниже 4°C, и поддерживает внутри датчика необходимую рабочую температуру, и исключает образования льда.
Датчик атмосферного давления 93 - цифровой барометр, чувствительным элементом которого является кремниевая диафрагма, работающий по принципу преобразования атмосферного давления в частоту.
Датчик температуры и относительной влажности воздуха 94 содержит измерительный преобразователь и чувствительные элементы (платиновый датчик сопротивления и кварцевый преобразователь влажности емкостного типа).
Температура и влажность воздуха изменяют величину сопротивления и емкость преобразователя чувствительного элемента и преобразуются измерительным преобразователем в линейно-изменяющиеся аналоговые сигналы, пропорциональные измеряемой температуре и влажности.
Датчик метеорологической (оптической) дальности видимости 95 содержит оптический передатчик - светодиодный излучатель инфракрасного (ИК) света и чувствительный фотодиод - приемник. Приемник и передатчик установлены под определенным углом друг к другу и на определенном расстоянии. Оценка метеорологической (оптической) видимости осуществляется путем измерения показателя ослабления инфракрасного света, вызванного рассеянием и поглощением его в фиксированном зондируемом пространстве. После анализа интенсивности рассеянного сигнала встроенным процессорным устройством, измеренная величина рассеивания преобразуется в показатель оптической дальности видимости и в цифровом коде ASCII передается по линии связи.
Датчик высоты нижней границы облаков 96 - оптический импульсный лазер, зондирующий в вертикальном направлении воздушное пространство импульсом длительностью 100 нс с энергией 1,6 мкДж. Неоднородность воздушного пространства в вертикальном направлении (облака, туман, осадки) вызывает отражение зондирующего импульса, который принимается приемником датчика. По времени задержки между посылкой зондирующего импульса и приходом отраженного сигнала процессор датчика рассчитывает высоту нижней границы облаков и в виде цифрового кода выдает на процессорный блок 91 по линии интерфейса RS-485.
Посредством блока управления и индикации 97 обеспечиваются следующие режимы работы:
- режим приема информации от МИСЗ;
- режим приема факсимильных карт и телеграмм;
- режим измерения гидрометеорологических параметров;
- режим контроля функционирования.
В режиме приема информации от МИСЗ обеспечивается получение снимков подстилающей поверхности и облачного покрова Земли, выполняемых в видимом и инфракрасном диапазонах аппаратурой МИСЗ типа "МЕТЕОР", "NOAA" и передаваемых узкополосным частотно-модулированным сигналом в метровом диапазоне 135-138 МГц. Режим выбирается оператором и осуществляется комплексом программного обеспечения (КПО), установленным в блоке управления и индикации 91.
При нахождении МИСЗ в зоне радиовидимости излучаемый передатчиком спутника сигнал принимается антенной, усиливается антенным усилителем и по кабелю поступает на вход основного или резервного канала приема метеорологического локатора 8. Каждый канал приема метеорологического локатора 8 содержит радиоприемник и блок синтезатора частоты. Сигнал гетеродина синтезируется в соответствии с управляющим кодом, поступающим на синтезатор основного или резервного каналов через основной (или резервный) СОМ порт блока управления и индикации 91. КПО вырабатывает управляющие коды, выбирающие канал приема (основной или резервный), задающие частоту настройки и время включения и выключения приемного канала для организации сеанса приема информации от МИСЗ.
Принятый основным (или резервным) радиоприемником низкочастотный аналоговый APT сигнал преобразуется в последовательный цифровой поток в блоке синтезатора частоты и выдается на основной или резервный выходы приемного канала. Цифровой поток основного (или резервного) канала с выхода приемного канала поступает соответственно на разъемы СОМ порта блока управления и индикации 91 и с помощью программного обеспечения записывается на жесткий диск, преобразуется в соответствующий графический формат и отображается на экране монитора. Обмен информацией осуществляется по интерфейсу RS-232.
Функционально программное обеспечение метеорологического локатора 8 подразделяется на блоки устройства первичной обработки, выполняющие аналого-цифровое преобразование видеосигнала, осреднение по дальности и количеству импульсов, включение РЛС и управление режимами сканирования антенны по углу места и блоки устройства вторичной обработки, посредством которых осуществляют распознавание метеорологических явлений. При этом используются следующие программные средства:
- операционная система, WINDOWS 95, 98, 2000;
- драйверы платы АЦП ADLink 9812 для WINDOWS 98 или 2000;
- драйверы платы RS 485.
Способ реализуется следующим образом.
Гидроакустическая аппаратура 6 устанавливается на автономных донных станциях 4 и морском терминале 2. При этом реализуется гидроакустический канал связи как между автономными донными станциями 4, так и между автономными донными станциями 4 и морским терминалом 2. Морской терминал 2 связан с добычной платформой по радиоканалу.
Аналогом автономных донных станций и гидроакустических каналов связи являются устройства, приведенные в описаниях к патентам RU (RU №№2276388, 2294000).
Метеорологический локатор 8, снабженный спутниковым каналом связи, принимает от искусственных спутников Земли, снабженных радиолокационной и оптической аппаратурой, снимки ледовых полей, расположенных в регионе размещения добычной платформы.
На пульте управления работой добычной платформы 1 анализируют принятую информацию и при выявлении потенциальных ледовых полей, которые при соответствующих гидрометеорологических условиях (скорость и направление ветра, течения и т.п.) могут представлять угрозу для безопасной эксплуатации добычной платформы 1, морского терминала 2 и судов по транспортировке нефти или газа от морского терминала 2, осуществляют наблюдения за развитием окружающей обстановки. Наблюдения за развитием гидрометеорологической ситуации в районе месторождения ведут путем регистрации и анализа зарегистрированных сигналов посредством метеорологического локатора 8, гидроакустических средств, установленных на автономных донных станциях 4, детектирования механизмов спин-фононных взаимодействий в морской воде посредством зонда протонного спинового эха, снабженного спектрометром протонного спинового эха и блоком обработки спин-релаксационных параметров, аналог которого описан (Зверев С.Б. Новый метод исследования динамики вод океана. - Владивосток: Труды Тихоокеанского океанологического института ДВО РАН, т.3, 1990, с.160-172).
Зонд протонного спинового эха 7 может быть установлен как непосредственно на ледовом поле, так и на летательном аппарате 5.
Посредством блока обработки спин-релаксационных параметров выполняют детектирования молекулярных спиновых взаимодействий протонов морской воды в жидкой (морская вода) и твердой фазах (ледовое образование).
Определяют τ - время и l - длину корреляции динамических переменных, описывающих потоки энергии или импульса. Параметры t и 1, которые характеризуют затухание во времени и пространстве взаимного влияния молекул, т.е. корреляцию на основании зависимостей:
tp=L/D2,
где D - коэффициент диффузии, tp - температура, tp=τ(L/l1)2, L - объем, tp=L/χ, χ - коэффициент температурной проводимости (Большая советская энциклопедия. Под ред. Прохорова A.M. 3-е издание, т.21. - М.: Советская энциклопедия, 1975, с.1854).
Так как время протонной спин-решетчатой релаксации морской воды изменяется в зависимости от температуры (Попов Н.И., Федоров К.Н., Орлов В.М. Морская вода. - М.: Наука, 1979, с.261; Мельниченко Н.А. Влияние основных компонентов морской воды на ее структурные особенности. Океанология, 1975, Т.15, Вып.5, С.839-841.), то ввиду разности температур воздуха, морской воды и ледяного образования определяются площадь и объем ледяного поля, а также выполняется определение характеристик (сплоченность, возраст и т.п.) путем детектирования механизмов спин-фононных взаимодействий в морской воде.
Одновременно с регистрацией сигналов посредством зонда протонного спинового эха 7 выполняют локационную съемку нижней подводной части ледяного поля посредством гидролокатора 6.
Приемоизлучающее устройство устанавливается на поворотную платформу, что позволяет осуществлять гидролокационное облучение ледового образования под разными углами и вдоль вертикальных (выступающие кили) и горизонтальных плоскостей ледового образования.
Измерения в области расположения килей выполняются с помощью широкополосного параметрического источника с реализацией в излучающем тракте параметрической гидроакустической локационной системы двухканального метода формирования исходных сигналов со средней частотой накачки 165 кГц, с диапазоном разностных частот, равным 5-50 кГц. Перестройка частоты в указанном диапазоне осуществляется как в течение длительности импульса по линейному закону, так и в режиме медленно меняющейся частоты от импульса к импульсу через 2, 4, 8 посылок. Шаг перестройки разностной частоты составляет 0,2 кГц.
При этом разница коэффициентов усилителя приемного тракта для каналов прямого и отраженного импульса отличается на величину, равную расстоянию между килями ледяного образования. Так как частота биений зависит от девиации частоты излучаемого сигнала и расстояния между килями, то по форме отраженного линейного частотно-модулированного сигнала различают одиночную и групповую цели и оценивают расстояние между элементами групповой цели при расположении объектов на расстояниях, меньших длительности зондирующего импульса.
Совпадение огибающих отраженных сигналов от ледяных образований с их частотными зависимостями дает возможность за одну посылку судить о частотных характеристиках отражающих элементов ледяного образования.
По характеру частотных зависимостей силы цели элементов ледяного образования можно различать одиночные объекты (кили) от групповых при их расположении на расстоянии, меньшем половины длительности зондирующего импульса.
Полученные изображения ледяного образования визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов нижней поверхности льда, которые при последующей обработке совмещаются с изображениями верхней части (надводной) ледяного поля, полученными посредством метеорологического локатора 8, измерительных средств летательного аппарата 5 и на основании результатов детектирования механизмов спин-фононных взаимодействий в морской среде методом когерентного импульсного протонного спинового эха, что позволяет исследовать физико-химические свойства морской воды на молекулярном уровне с восстановлением механических изменений структуры превращения морской воды в лед, что позволяет восстановить процесс перехода жидкой фазы в твердую фазу с определением характеристик морского льда, по которым судят о состоянии ледяного покрова.
Совокупность измерительных средств, включающая метеорологический локатор и гидроакустические средства, позволяет также определить и дрейф ледовых полей, определение которого известными способами практически не осуществляется.
По сравнению с известными способами определения состояния ледяного покрова предлагаемый способ более объективен, а его реализация возможна на перспективной промышленной базе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения состояния ледяного покрова | 2016 |
|
RU2635332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН | 2010 |
|
RU2435136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2416070C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2015 |
|
RU2593411C1 |
| Способ определения состояния ледяного покрова | 1988 |
|
SU1788487A1 |
| СПОСОБ РАЗВЕДКИ ЛЕДОВОЙ ОБСТАНОВКИ НА СЕВЕРНОМ МОРСКОМ ПУТИ | 2018 |
|
RU2694085C1 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2444760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ШИРИНЫ ТРЕЩИН С ОТКРЫТОЙ ВОДОЙ В ЛЕДЯНОМ ПОКРОВЕ АКВАТОРИЙ | 2009 |
|
RU2404442C1 |
Изобретение относится к области метеорологии и может быть использовано для определения параметров, характеризующих состояние ледяного покрова. Сущность: получают спутниковые радиолокационные снимки в оптическом диапазоне длин волн. Анализируют и интерпретируют изображения. Интерактивно, используя мозаики из разновременных изображений, выделяют границы ледовых зон. Определяют возраст и сплоченность льда, используя результаты томографической съемки ледяного покрова. Определяют толщину льда и морфографические аномалии подводной части ледяного образования, используя результаты зондирования ледового образования линейными частотно-модулированными импульсами. Технический результат: повышение достоверности определяемых параметров. 5 ил.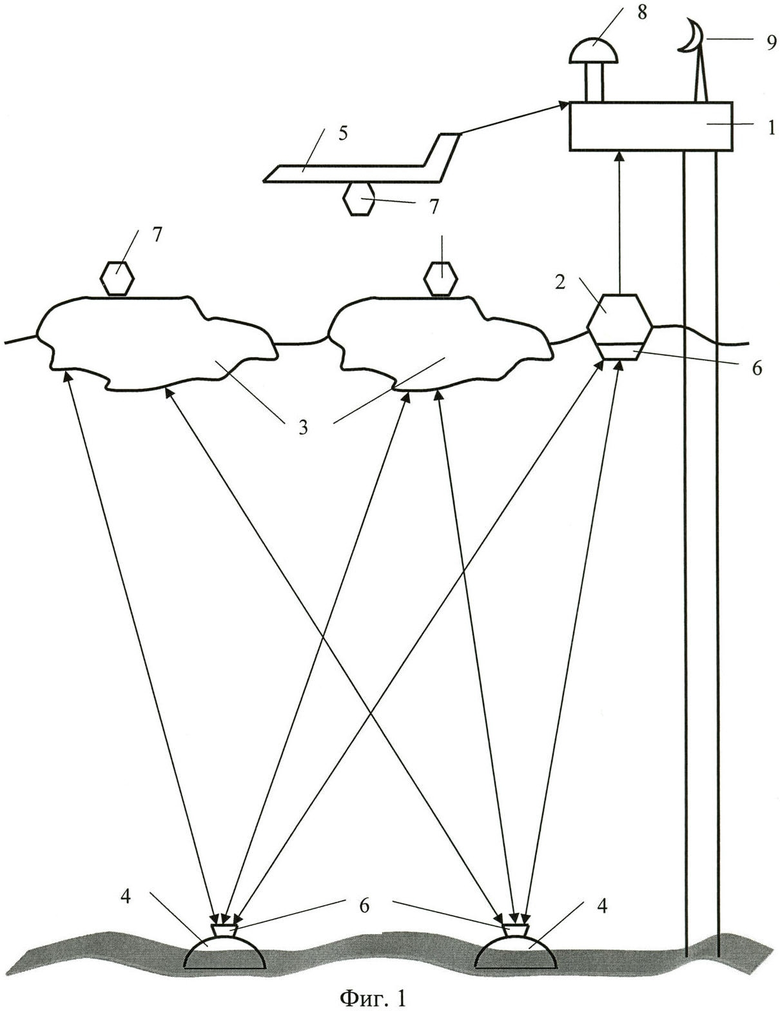
Способ определения состояния ледяного покрова, включающий получение спутниковых радиолокационных снимков в оптическом диапазоне длин волн, анализ и интерпретацию изображений, интерактивное выделение границ ледовых зон с использованием мозаик из разновременных изображений, отличающийся тем, что при определении возраста и сплоченности льда выполняют томографическую съемку ледяного покрова, толщину льда и морфографические аномалии подводной части ледяного образования определяют посредством параметрического гидроакустического измерителя путем зондирования ледового образования линейными частотно-модулированными импульсами.
| Способ определения состояния ледяного покрова | 1988 |
|
SU1788487A1 |
| Способ измерения толщины льда | 1977 |
|
SU643817A1 |
| СПОСОБ ПОДВОДНОЙ НАВИГАЦИИ ПРИ ОПРЕДЕЛЕНИИ КООРДИНАТ ИСКУССТВЕННОЙ ПОЛЫНЬИ | 1996 |
|
RU2115136C1 |
| Зверев С.Б | |||
| Новый метод исследования динамики вод океана | |||
| Труды Тихоокеанского океанологического института ДВО РАН, т.3 | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Лебедев Г.А., Парамонов А.И | |||
| Инфракрасная радиометрия ледяного покрова акваторий для практического использования | |||
| Тезисы докладов на Второй Арктической Конференции | |||
| - СПб, 22-25 сентября 2009. | |||

