Изобретение относится к области оптических измерений с применением дифракционной оптики и может найти применение при поиске, определении пространственного положения и ориентации группы рассеивающих частиц в различных оптических элементах, а также при получении достоверных измерений пространственно-частотных спектров этих рассеивающих частиц с целью их точной идентификации, повышения точности в определении их размеров и расстояний между ними.
Известен способ определения рассеивающих частиц в воде в виде клеток диатомной водоросли, имеющих различные размеры и форму, при котором отдельные разновидности этих клеток сначала фотографируют с помощью фазово-контрастного микроскопа, а затем используют полученные фотоизображения для изготовления пространственно-частотных фильтров с целью идентификации клеток по сигналам корреляции, получаемым в оптическом процессоре (Г.Старк. Применение методов фурье-оптики. М., Радио и Связь, 1988 г., стр. 82).
Однако неинвариантность фурье-преобразования у угловому положению может снизить степень идентификации при "невыгодных" направлениях фотографирования исходной пробы загрязненной воды.
Известен также способ определения оптических неоднократностей в виде текстур (Г.Старк. Применение методов фурье-оптики. М., Радио и Связь, 1988 г., стр. 440), заключающийся в том, что различные образцы текстур записывают на фотопленку, которую помещают в иммерсионную жидкость для устранения паразитной фазовой модуляции, обусловленной поверхностным рельефом самих образцов. Далее с помощью когерентного оптического процессора получают фурье-спектры фотоизображений текстур с целью формирования векторов, представляющих собой блоки цифровых данных энергетических спектров. При этом векторы формируются с помощью масок, синтезированных на ЭВМ, а каждая маска выполняет разбиение фурье-плоскости на несколько областей. Интенсивность в каждой из таких областей численно интегрируют и нормируют относительно величины полного интеграла интенсивности. Способ реализуют с помощью оптико-цифрового устройства, представляющего собой каскадное соединение когерентного оптического процессора и ЭВМ, а в качестве интерфейса между ними используют телевизионную камеру.
Недостатком данного способа является то, что фотоизображения исследуемых текстур получают без учета их пространственного положения и ориентации относительно оптической оси фоторегистрирующего устройства, в результате чего может нарушиться адекватность качественных изменений исследуемых текстур и количественных изменений в их энергетических спектрах.
Известен также способ определения рассеивающих частиц в оптически прозрачных средах, который заключается в том, что неоднородности в виде частиц различной концентрации идентифицируются по размерам и видам с помощью методов фурье-оптики (Г.Старк. Применение методов фурье-оптики. М., Радио и связь, 1988 г., стр. 108).
При этом получают фотографические или иные изображения дифракционных картин рассеяния этих частиц, которые обрабатывают в когерентном оптическом процессоре с целью получения двумерного фурье-образа этих изображений и осуществления согласованной оптической фильтрации.
Измерение энергетических спектров и других параметров производят с помощью электронных средств, включающих фотоприемное устройство (телевизионную камеру, фотоматрицу), сопряженное с ЭВМ.
Этот способ принимаем за прототип. К недостаткам данного способа можно отнести снижение достоверности результатов измерений энергетических спектров с ростом концентрации частиц, при котором частицы начинают перекрывать друг друга, в результате чего начинает проявляться эффект вторичного излучения, которое уже было рассеяно другими частицами.
Техническим результатом изобретения является повышение достоверности измерений пространственно-частотных спектров путем точного определения пространственного положения группы рассеивающих частиц и ее ориентации, а также усреднения результатов измерений пространственно-частотных спектров, полученных по всем трем направлениям распространения когерентного света через группу рассеивающих частиц.
Технический результат достигается тем, что перед измерением пространственно-частотных спектров производят поиск группы рассеивающих частиц, затем определяют ее пространственное положение относительно границ среды, после чего определяют ориентацию группы в пространстве, при этом для нахождения группы рассеивающих частиц вычисляют коэффициенты корреляции интенсивности дифракционной картины сканируемого по дальности пространства в одном направлении, для определения пространственного положения дополнительно измеряют коэффициенты корреляции интенсивности дифракционной картины сканируемого по дальности пространства в двух других направлениях, взаимно перпендикулярных первоначальному, до момента достижения наибольшего взаимного соответствия всех трех усредненных максимальных значений коэффициентов корреляции, для определения ориентации выбирают максимально возможные значения усредненных коэффициентов корреляции в процессе изменения углового положения каждого из трех направлений распространения когерентного света, после чего измеряют пространственно-частотные спектры и усредняют их результаты, полученные по трем направлениям, причем для поиска группы рассеивающих частиц используют широкий коллимированный пучок когерентного света, а для определения ориентации - узкий коллимированный пучок.
В случае необходимости измерение пространственно-частотных спектров повторяют после дополнительной юстировки углового положения каждого из трех направлений и сужения соответствующих им пучков когерентного света, при этом измеряют распределение интенсивности света в соответствующей дифракционной картине до момента его наибольшей равномерности вблизи оптической оси.
Новизна изобретения выявлена из сравнения с прототипом и заключается в следующем:
во-первых, для измерения пространственно-частотного спектра исследуемой группы рассеивающих частиц используют данные измерений пространственно-частотных спектров изображений дифракционных картин рассеяния, полученных по трем направлениям распространения пучков когерентного света через эту группу рассеивающих частиц, затем эти данные усредняют с целью повышения достоверности результатов измерения;
во-вторых, для получения изображения дифракционных картин рассеяния, наиболее полно отражающих число рассеивающих частиц в группе, их форму, расстояния между ними, используют метод сканирования пространства по дальности по трем взаимно перпендикулярным направлениям распространения пучков когерентного света через исследуемую группу рассеивающих частиц с целью определения ее пространственного положения относительно границ среды, затем определяют ориентацию группы в пространстве относительно каждого из трех направлений путем изменения их углового положения; при указанных операциях используют критерий наибольшего взаимного соответствия максимальных усредненных значений коэффициентов корреляции интенсивности света в дифракционных картинах, получаемых в процессе сканирования пространства по трем направлениям и критерий максимальности усредненных коэффициентов корреляции интенсивности света в дифракционных картинах, получаемых в процессе определения ориентации по каждому из трех направлений распространения когерентного света;
в-третьих, в случае необходимости повышения достоверности результатов измерения пространственно-частотного спектра исследуемой группы рассеивающих частиц получают изображения дифракционных картин рассеяния по трем направлениям распространения когерентного света после дополнительной юстировки углового положения каждого из трех направлений и сужения соответствующих им пучков когерентного света, при этом используют критерий наибольшей равномерности интенсивности света в соответствующей дифракционной картине вблизи оптической оси.
Предлагаемый способ определения группы рассеивающих частиц в оптически прозрачных средах основан на том, что в процессе определения измерение пространственно-частотных спектров производят после более точного определения положения группы рассеивающих частиц относительно границ среды и ее ориентации в пространстве.
При этом достоверность измерений повышается за счет снижения эффекта вторичного излучения, которое уже было рассеяно другими частицами группы. При таком условии в формировании дифракционной картины рассеяния будет участвовать максимальное число частиц в группе, что и обуславливает высокую степень достоверности результатов измерения пространственно-частотных спектров.
Так как в общем случае группа рассеивающих частиц имеет объемный характер, то при определении ее пространственного положения, ориентации, а также при измерении ее пространственно-частотного спектра последовательно используют три пучка когерентного света, проходящих через исследуемую группу рассеивающих частиц.
Для более быстрого определения пространственного положения группы рассеивающих частиц используют широкие коллимированные пучки когерентного света, а для ее ориентации - узкие пучки (для повышения точности измерений), при этом для регистрации дифракционных картин рассеяния применяют фоторегистрирующее устройство, способное работать в квазиреальном масштабе времени, например телекамеру, сопряженную с ЭВМ.
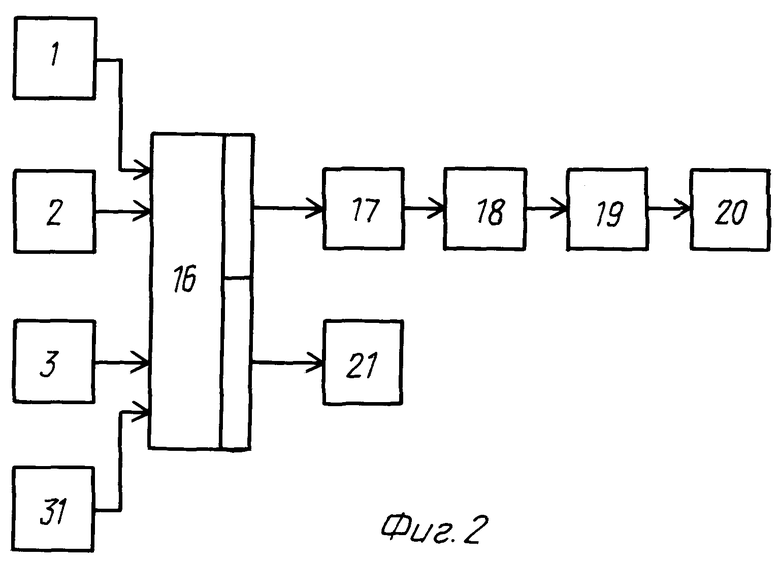
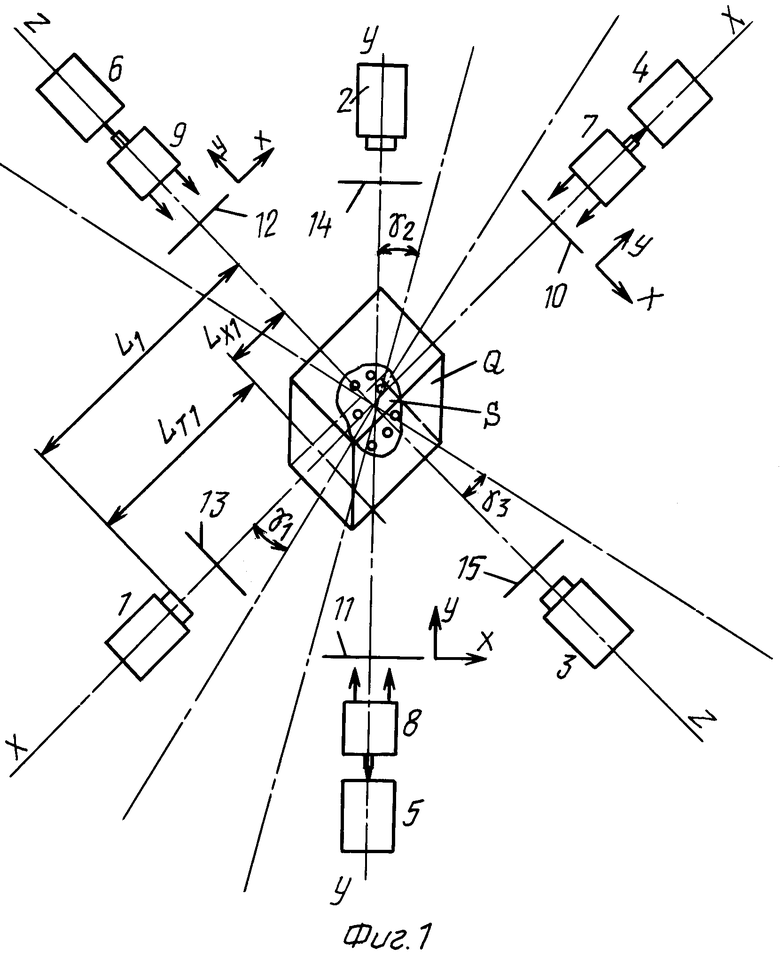
В процессе поиска группы рассеивающих частиц S телекамеру 1 (фиг.1), оптически сопряженную с лазером 4, перемещают вдоль выбранного направления Х прохождения когерентного света через исследуемую оптически прозрачную среду Q, регистрируя дифракционные картины рассеяния на экране видеоконтрольного устройства 21 (фиг.2). При этом объектив телекамеры устанавливают на "бесконечность", диафрагму - в положение, соответствующее максимальной входной апертуре, а освещенность на фотомишени регулируют с помощью аттенюатора 13 (фиг.1). Для расширения лазерного пучка используют коллиматор 7, а для регулирования размеров его поперечного сечения х, у - прямоугольную диафрагму 10.
Перемещение телекамеры начинают с исходного положения, соответствующего ее расстоянию до предполагаемой области с группой рассеивающих частиц, равного фокусному расстоянию F1 применяемого объектива.
При таком условии в процессе перемещения телекамеры в сторону группы рассеивающих частиц будут последовательно регистрироваться, начиная с ближайшего граничного, последующие слои пространства группы в виде неразмытых дифракционных картин рассеяния на частицах неоднородностей вплоть до дальнего слоя, ограничивающего эту группу с другой стороны (то есть будет производиться своеобразное сканирование пространства фокальной плоскостью объектива в заданном направлении по дальности, ограниченной фокусным расстоянием). Перемещение телекамеры прекращают в тот момент, когда характер дифракционных картин рассеяния, регистрируемых на экране видеоконтрольного устройства (ВКУ), перестанет изменяться. После этого вычисляют размер Δ Lx группы рассеивающих частиц в данном направлении путем измерения расстояния между двумя крайними положениями телекамеры. Далее телекамеру перемещают обратно на расстояние, равное Δ Lx/2, и с этой дистанции регистрируют дифракционные картины рассеяния, передвигая телекамеру в плоскости, перпендикулярной данному направлению когерентного света, при этом выполняют условия оптического сопряжения с лазером 4. Перемещение телекамеры и регистрацию соответствующих дифракционных картин рассеяния производят до момента появления дифракционной картины, наиболее полно отражающей характер группы рассеивающих частиц и ее объем в данном направлении. После этого измеряют коэффициент корреляции интенсивности дифракционной картины (фиг.2). Измерения повторяют при положениях телекамеры, отличающихся на небольшую величину от найденного, до нахождения таких трех положений, которые соответствовали бы наибольшим значениям коэффициентов корреляции дифракционных картин рассеяния. Далее телекамеру устанавливают в среднее между этими тремя положение и перемещают в исходное положение вдоль данного направления распространения когерентного света с целью более точного определения размера Δ Lx группы рассеивающих частиц. Для этого телекамеру снова перемещают вдоль нового найденного направления, параллельного первоначальному, измеряя коэффициенты корреляции интенсивности дифракционных картин рассеяния и одновременно регистрируют эти картины на экране ВКУ 21 до момента достижения максимальных значений коэффициентов. После этого определяют размер Δ Lx группы рассеивающих частиц путем измерения расстояния между двумя крайними положениями телекамеры, причем первое положение соответствует дифракционной картине рассеяния с минимальным коэффициентом корреляции, а второе - дифракционной картине с максимальным коэффициентом корреляции световой интенсивности, при этом оба положения телекамеры находят путем усреднения из трех положений, соответствующих дифракционным картинам рассеяния с близкими по величине коэффициентами корреляции световой интенсивности в этих граничных слоях пространства группы рассеивающих частиц. Для определения пространственного положения группы рассеивающих частиц относительно границ среды последовательно производят определение размеров Δ Lx, Δ Lz группы рассеивающих частиц вдоль двух других направлений распространения света через группу, взаимно перпендикулярных первоначальному направлению (фиг.1), для чего дополнительно используют две телекамеры 2, 3, оптически сопряженные с соответствующими лазерами 5 и 6.
При этом телекамеру 2 и оптически сопряженный с ней лазер 5 устанавливают по оси Y, перпендикулярной оси Х, и пересекающей ее на расстоянии L1 от телекамеры 1, равном величине
L’1=F1+Δ Lx/2,
если телекамера 1 находится в первом крайнем положении, соответствующем минимальному коэффициенту корреляции световой интенсивности дифракционной картины рассеяния и величине
L”1=F1-Δ Lx/2,
если телекамера 1 находится в другом крайнем положении, соответствующем максимальному коэффициенту корреляции световой интенсивности (здесь F1 - фокусное расстояние объектива телекамеры 1).
Далее определяют размер группы рассеивающих частиц Δ Ly в направлении распространения когерентного света через группу вдоль оси Y, выполняя действия, аналогичные при определении величины Δ Lx, и отмечают при этом оба крайних положения телекамеры 2.
После этого определяют размер Δ Lz группы рассеивающих частиц в направлении распространения когерентного света через эту группу вдоль оси Z, перпендикулярной осям Х и Y и проходящей через их точку пересечения, для чего телекамеру 3 и оптически сопряженный с ней лазер 6 устанавливают вдоль этой оси и производят действия, аналогичные при определении величины Δ Lx, при этом отмечают оба крайних положения телекамеры 3.
Пространственное положение группы рассеивающих частиц относительно границ среды определяют с учетом размеров группы Δ Lx, Δ Ly, Δ Lz вдоль различных направлений распространения когерентного света и положения телекамер.
Если все три телекамеры находятся в крайних положениях, соответствующих максимальным коэффициентам корреляции интенсивности соответствующих дифракционных картин рассеяния, то координаты Lx1, Ly1, lz1 группы рассеивающих частиц относительно границ среды Q вычисляют следующим образом:
LX1=(F1-Δ LX/2)-LT1
LY1=(F2-Δ LY/2)-LT2
LZ1=(F3-Δ LZ/2)-LT3,
где F1...F3 - фокусные расстояния объективов телекамер 1... 3.
Δ Lx, Δ Ly, Δ Lz - размеры группы рассеивающих частиц вдоль различных направлений прохождения когерентного света (вдоль осей X, Y, Z.)
LT1...LT3 - расстояния от соответствующих телекамер до границ исследуемой оптически прозрачной среды Q.
Для определения ориентации группы рассеивающих частиц в пространстве последовательно изменяют угловое положение каждого из трех направлений прохождения когерентного света через группу рассеивающих частиц с целью нахождения такого углового положения, при котором коэффициенты корреляции интенсивности в соответствующих дифракционных картинах рассеяния достигают максимальных значений.
Измерения коэффициентов корреляции повторяют в процессе сужения пучков когерентного света по соответствующим направлениям с помощью диафрагм 10... 12 до момента уменьшения значений этих коэффициентов, при этом сужение пучков производят последовательно сначала по одной координате (х), затем по другой (у), учитывая, таким образом, несимметричный характер формы группы рассеивающих частиц. Затем полученные коэффициенты корреляции усредняют по трем наибольшим значениям и определяют ориентацию группы рассеивающих частиц в пространстве относительно первоначальных направлений прохождения когерентного света путем вычисления углов γ 1...γ3, лежащих в плоскостях XZ, YZ, ZX (фиг.1).
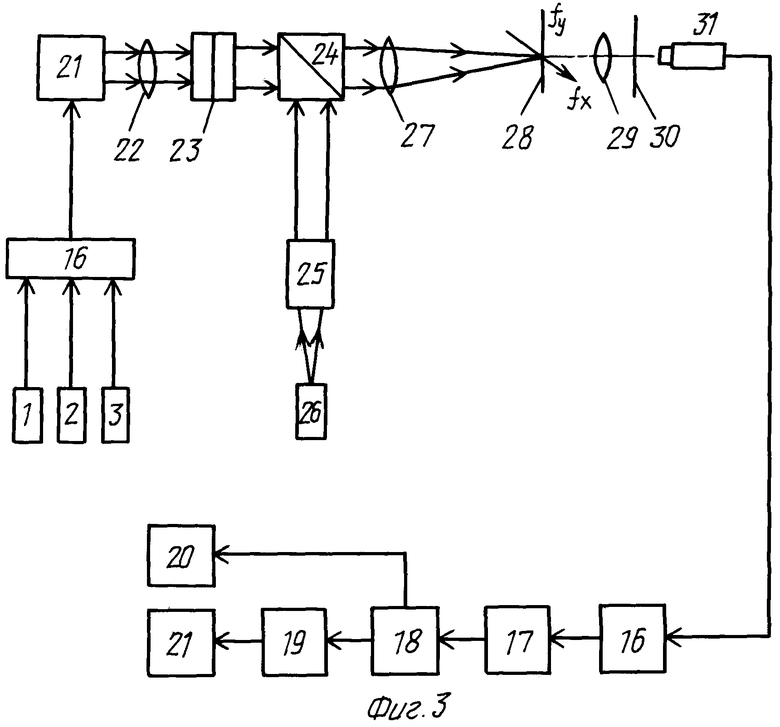
После определения ориентации приступают к измерению пространственно-частотных спектров группы рассеивающих частиц. Для этого с помощью телекамер 1... 3 и коммутатора 16 последовательно получают изображения группы рассеивающих частиц по каждому из трех вновь найденных направлений прохождения когерентного света через группу рассеивающих частиц путем регистрации этих изображений на экране ВКУ21 (фиг.3) с их последующим преобразованием в когерентно-оптические изображения посредством жидко-кристаллического пространственно-временного модулятора света (ЖК-ПВМС 23), изображающего объектива 22, светоделителя 24, коллиматора 25 и лазера 26). Затем эти изображения обрабатывают в когерентно-оптическом процессоре 27, 28 с целью получения их фурье-образа, который увеличивают с помощью микрообъектива 29 и проецируют на матовый экран 30. С помощью телекамеры 31 производят преобразование световой интенсивности получаемых картин в электрические сигналы, которые затем преобразуются в цифровую форму в аналого-цифровом преобразователе 17 и поступают для хранения в блок буферной памяти 18, содержимое которой через устройство выборки 19 подается в ЭВМ 20 для анализа и расчета пространственно-частотных спектров, а также может отражаться на экране ВКУ 20.
После этого результаты расчетов пространственно-частотных спектров, полученных после обработки изображений группы рассеивающих частиц по каждому из трех направлений прохождения когерентного света, усредняют и используют для дальнейшего анализа.
При получении изображений группы рассеивающих частиц их регистрацию на экране ВКУ 21 производят с наибольшим масштабом и обеспечивают соответствующую глубину резко изображаемого пространства, используя данные, рассчитанные при определении пространственного положения группы рассеивающих частиц (LT1, L1, Lx1, Δ Lx - по оси X и аналогичные данные по осям Y и Z).
В случае необходимости расширения динамического диапазона телекамеры 31 (фиг.3) улучшают отношение сигнал-шум примененного в ней видикона в ущерб скорости обработки за счет усреднения нескольких последовательных изображений одной и той же картины с целью снижения зависящего от времени уровня шума.
При этом отношение сигнал-шум улучшается как квадратный корень из числа усредненных кадров.
Для повышения достоверности результатов измерения пространственно-частотного спектра группы рассеивающих частиц последовательно производят юстировку углового положения каждого из трех направлений распространения когерентного света и сужение соответствующих световых пучков, при этом измеряют распределение световой интенсивности в соответствующих дифракционных картинах рассеяния вблизи оптической оси (то есть в центральной части) до момента достижения наибольшей равномерности этой интенсивности в минимальной по площади области.
Для этого телекамеры 1... 3 возвращают в положения, которые они занимали при определении ориентации группы рассеивающих частиц (фиг.1), и последовательно изменяют их угловые положения относительно первоначальных направлений прохождения когерентного света в плоскостях, перпендикулярных соответствующим плоскостям углов γ 1...γ3. При этом обеспечивают условия оптического сопряжения телекамер с соответствующими лазерами.
Сужение когерентных пучков производится с помощью соответствующих диафрагм 10... 12 отдельно по одной координате (х), затем по другой (у), учитывая, таким образом, несимметричный характер формы группы рассеивающих частиц. В процессе юстировки и сужения пучков распределение световой интенсивности в дифракционной картине рассеяния вблизи оптической оси (в центральной части картины) будет зависеть от доли света, проходящего через частицы неоднородностей без рассеяния, а также света, прошедшего через свободное пространство между частицами и вне их группы. При достижении наибольшей равномерности световой интенсивности в минимальной области вблизи оптической оси будут выполняться условия уменьшения эффекта вторичного излучения, которое уже было рассеяно другими частицами, а также оптимальности размеров сечения пучка по обеим координатам (х и у), когда доля света, прошедшего вне группы рассеивающих частиц, будет минимальна.
После этого измеряют пространственно-частотные спектры по каждому вновь найденному направлению прохождения когерентного света через группу рассеивающих частиц и усредняют эти результаты, для чего производят действия по измерению пространственно-частотных спектров, описанных ранее после определения ориентации группы рассеивающих частиц в пространстве.
Коэффициенты корреляции световой интенсивности дифракционных картин рассеяния на частицах группы находят на основе формулы

где угловые скобки означают усреднение по ансамблю соответствующих световых интенсивностей IN, а σ - их среднеквадратические отклонения, при этом шаг выборки in выбирают с учетом разрешающей способности телекамеры и требуемого коэффициента избыточности информации, поступающей в ЭВМ.
Пространственно-частотные спектры группы рассеивающих частиц определяют на основе формулы
где Ni - число частиц группы, равное N1…nl и размером di, равным d1...dL;
Gi (fx) - пространственно-частотные спектры дифракционных картин рассеяния, порожденные частицами размером di;
fx - дискретные пространственные частоты, на которых производится выработка значений световой интенсивности фурье-картины (fx=fx1, fx2...fxn),
причем шаг а выборки выбирают таким, чтобы выполнялось следующее условие
а≤ 1/2fX max,
fX max - максимальная пространственная частота,
n (fX) - перекрестный член, обусловленный суммированием многих косинусоидальных сигналов со случайными пространственными частотами.
Распределение световой интенсивности вблизи оптической оси определяют с помощью операции нормирования световой интенсивности в различных областях относительно интенсивности центральной области и сравнения результатов нормирования с заданным коэффициентом неравномерности, зависящим от формы группы рассеивающих частиц, концентрации частиц и их оптических характеристик и расположения в группе.
Операцию нормирования завершают после достижения результатов нормирования близких или равных заданному коэффициенту неравномерности, причем из них выбирают такие, которые соответствуют минимальной площади дифракционной картины.
Перед нормированием плоскость дифракционной картины вблизи оптической оси разбивают на ряд областей с помощью маски, синтезированной на ЭВМ.
Интенсивность светового поля в каждой из таких областей интегрируют и нормируют относительно интенсивности светового поля центральной области.
Площадь дифракционной картины определяют интегрированием площадей всех внутренних областей, ограниченных внешними областями, для которых выполняется условие равномерности световой интенсивности.
Минимальный размер области выбирают из условия максимальной разрешающей способности телекамеры и объема буферной памяти, а расположение областей - по радиальным сегментам и кольцам.
Благодаря описанному подходу в определении группы рассеивающих частиц в оптически прозрачных средах достоверность результатов измерения пространственно-частотных спектров повысилась в среднем на 25% и зависит от концентрации частиц в группе, их оптических характеристик и пространственного расположения.
В заявляемом изобретении повышение достоверности результатов измерения пространственно-частотного спектра группы рассеивающих частиц достигается за счет снижения эффекта вторичного излучения, которое уже было рассеяно другими частицами, за счет выбора оптимальных направлений регистрации изображений группы, точного определения ее размеров, а также усреднения результатов измерения, и обеспечивается совокупностью всех предложенных операций по определению группы рассеивающих частиц в оптически прозрачных средах.
Данное техническое решение опробовано в лабораторных условиях ВМА и может быть рекомендовано в прикладных областях, занимающихся идентификацией различных неоднородностей.
Источники информации
1. Г.Старк. Применение методов фурье-оптики. - М., Радио и Связь.1988, с.82-90; 108-111; 179-182; 440-444.
2. Л.А.Залманзон. Преобразования Фурье, Уолша, Хаара. - М., Наука, 1989, с.298-307.
3. Е.И.Куликов. Методы измерения случайных процессов. - М., Радио и Связь. 1986, с.260-262.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ВНУТРЕННЕЙ СТРУКТУРЫ ОБЪЕКТОВ | 2000 |
|
RU2184347C2 |
| СПОСОБ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2005 |
|
RU2303393C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ КАЧЕСТВА РАСПЫЛИВАНИЯ ЖИДКОСТИ ФОРСУНКАМИ | 2006 |
|
RU2329486C2 |
| КОГЕРЕНТНАЯ ЛИДАРНАЯ СИСТЕМА НА ОСНОВЕ ПОЛУПРОВОДНИКОВОГО ЛАЗЕРА И УСИЛИТЕЛЯ | 2008 |
|
RU2484500C2 |
| Устройство для измерения ворсистости ткани | 1990 |
|
SU1795370A1 |
| СПОСОБ ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СПЕКЛОВ В ОПТИЧЕСКИХ СКАНИРУЮЩИХ ДИСПЛЕЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2282228C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ КОСМИЧЕСКОГО ОБЪЕКТА, НАБЛЮДАЕМОГО ЧЕРЕЗ ТУРБУЛЕНТНУЮ АТМОСФЕРУ | 2014 |
|
RU2575538C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СКВАЖИННАЯ СЕЙСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ НА ОСНОВЕ РЭЛЕЕВСКОГО ОБРАТНОГО РАССЕЯНИЯ | 2012 |
|
RU2561009C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАЗМЕРОВ СРЕДНЕГО ДИАМЕТРА ОБЪЕКТОВ В ГРУППЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2044265C1 |
Способ определения группы частиц рассеивающих частиц в оптически прозрачных средах включает измерение пространственно-частотных спектров изображений рассеивающих частиц с помощью фурье-оптики и цифровых средств. При этом перед измерением производят поиск группы рассеивающих частиц, затем определяют ее пространственное положение относительно границ среды, после чего определяют ориентацию группы в пространстве. Для нахождения группы рассеивающих частиц получают коэффициенты корреляции интенсивности дифракционной картины сканируемого по дальности пространства в трех направлениях, до момента достижения взаимного соответствия всех трех усредненных максимальных значений коэффициентов корреляции, а для определения ориентации выбирают максимально возможные значения усредненных коэффициентов корреляции в процессе изменения углового положения каждого из трех направлений распространения когерентного света, после чего измеряют пространственно-частотный спектр и усредняют его результаты, полученные по трем направлениям. Для поиска группы рассеивающих частиц используют широкий коллимированный пучок когерентного света, а для определения ориентации - узкий коллимированный пучок. Техническим результатом изобретения является повышение достоверности измерений пространственно-частотных спектров. 1 з.п. ф-лы, 3 ил.
| US 5162645 A, 10.11.1992 | |||
| СПОСОБ СКВАЖИННОЙ ОТБОЙКИ СКАЛЬНЫХ ГОРНЫХ ПОРОД | 0 |
|
SU358507A1 |
| Способ определения оптических характеристик рассеивающих сред | 1990 |
|
SU1798664A1 |
| Способ выделения оптических неоднородностей в рассеивающих средах | 1990 |
|
SU1788485A1 |

