Настоящее изобретение относится к компактной, надежной и недорогой когерентной лидарной системе (оптической локации) на основе полностью полупроводникового источника света, предназначенной для дистанционного определения скорости ветра, определения концентрации частиц и/или температуры, и к связанным с ней способам.
Когерентная лидарная система является привлекательной системой для определения в удаленных пунктах скорости ветра на линии визирования. Основной принцип связан с доплеровским сдвигом, образующимся при обратном рассеивании света от аэрозолей, облучаемых когерентным лазерным светом. В предположении, что перемещения аэрозолей почти совпадают с воздушным течением, измеряемую доплеровскую частоту можно использовать для вычисления пропорциональной скорости ветра.
Не только аэрозоли, такие как капли воды, пыль и т.д., могут создавать доплеровский сдвиг в рассеиваемом обратно сигнале, но также и одиночные частицы.
Когерентный лидар непрерывного излучения основан на фокусирующих свойствах лазера в пределах фактического объема зондирования. Ширина объема зондирования ограничена диаметром лазерного пучка в области фокусировки (то есть конфокальной области). Длина объема зондирования вдоль оси пучка ограничена приблизительно длиной Рэлея сфокусированного лазерного пучка. В случае лидара непрерывного излучения, сфокусированного на расстоянии одной сотни метров от лидарной системы непрерывного излучения, ширина объема зондирования в зависимости от длины волны и фокусирующей оптики (телескопа) обычно имеет порядок одного сантиметра, а длина объема зондирования имеет порядок десяти метров. Для импульсных систем ширина объема зондирования такая же, как для лидара непрерывного излучения, но длина объема зондирования задается пространственной длиной излучаемого импульса.
Основные принципы когерентного лидара установлены более чем 35 лет назад, сравните с “Signal-to-noise relationships for coaxial systems that heterodyne backscatter from the atmosphere”, Applied Optics, vol.10, № 7, July 1971, C.M. Sonnenschein and F.A. Horrigan. Традиционно применения представляли научный интерес, например, в физике атмосферы. Однако в настоящее время лидар становится все более и более значимым для практических промышленных применений. Одним таким примером является контроль ветровых турбин. Необходимость в более высокой эффективности вынуждает отрасль производства ветровых турбин в течение последних десятилетий непрерывно увеличивать ветровой пролет, чтобы улучшать характеристики в части получаемой электрической энергии на каждую установленную ветровую турбину. Однако увеличение ветрового пролета приводит к значительной механической нагрузке, создаваемой сильным ветром и, в частности, вихревым потоком. Компактное, надежное и недорогое когерентное лидарное устройство для прогнозирования скорости встречного ветра порядка десятков метров позволит осуществлять оптимизацию и защиту ветровых турбин. Задержку между временем фактического измерения скорости ветра и временем, когда ветер действительно достигает ветровой турбины, можно использовать для защиты лопастей от нагрузки, например, изменением шага лопастей. Еще одним примером является обнаружение вихрей, создаваемых выполняющими посадку летательными аппаратами. Частота посадки (или взлета) летательных аппаратов в основном определяется пределами безопасности, чтобы гарантировалось отсутствие опасности от вихрей, создаваемых предыдущим летательным аппаратом. Использование когерентного лидара для наблюдения за вихрями позволяет минимизировать этот защитный период времени и тем самым повышать интенсивность трафика и пропускную способность аэропорта.
Факторами, препятствующими широкому распространению лидара, являются стоимость, энергопотребление, габариты и невысокая прочность. Стоимость современных доступных для приобретения лидарных систем составляет примерно 200000 долларов США, это ценовой уровень, который исключает многие применения. В случае использования лидарных систем в удаленных местах, например на месте установки морских ветровых электростанций, необходимо, чтобы работа осуществлялась при незначительном техническом обслуживании или без него в течение длительных периодов времени, а также при низком энергопотреблении.
В “Single-particle laser Doppler anemometry at 1.55 µm”, Applied Optics, vol.40, № 6, Michael Harris, Guy N. Pearson et al., раскрыта лидарная система непрерывного излучения для измерений скорости ветра. Составляющая скорости на линии визирования определяется путем измерения сдвига частоты света, рассеиваемого на небольших частицах в атмосфере, которые предполагаются перемещающимися с той же самой скоростью, что и ветер. Как обычно, сдвиг частоты измеряется путем гетеродинного детектирования, при котором принимаемый, рассеиваемый обратно свет смешивается с опорным пучком гетеродина. В таком случае скорость ветра выводится из получающейся в результате частоты биений. Лазер содержит полупроводниковый лазерный источник, работающий на длине волны 1,55 мкм, излучение которого усиливается до около 1 Вт усилителем мощности на волокне, легированном эрбием, в конфигурации усилитель мощности с задающим генератором (УМЗГ). Задающий генератор представляет собой In/P лазер с протяженным резонатором, и ширина его линии, измеренная автодинным методом с задержкой, составляет около 20 кГц.
Кроме того, когерентный лидар непрерывного излучения в виде промышленного изделия имеется в продаже [Quinetic]. В этой системе используется волоконный кольцевой генератор с диодной накачкой, после которого, чтобы получать отвечающий требованиям пучок на 1,55 мкм, следует усилитель с диодной накачкой на волокне, легированном эрбием.
Хотя термин «гетеродинное детектирование» часто используют применительно к оптической интерферометрии, термин «гомодинное детектирование» используется на протяжении этого раскрытия для обозначения того, что опорный пучок (гетеродина) получают от того же источника, что и сигнальный пучок, до процесса модуляции, то есть рассеяния целью.
Таким образом, имеется необходимость в недорогих и надежных когерентных лидарных системах, открывающих новые промышленные применения, рассмотренные выше.
В настоящее время наиболее дорогим и сложным компонентом в когерентной лидарной системе является лазерный узел. Вследствие чрезвычайно низкого коэффициента обратного рассеяния аэрозолей (~10-12) требуется усовершенствованная схема обнаружения, которая в значительной степени основана на высококачественных источниках когерентного света большой мощности. Чтобы получать достаточное для обнаружения количество рассеиваемого обратно света, выходная мощность лазерного узла в непрерывном режиме должна быть порядка 1 Вт. Для метода гомодинного детектирования прежде всего требуется, чтобы длина когерентности источника света была по существу в два раза больше расстояния до объема зондирования, например, 200 м в случае типичных применений для ветровых турбин. Это соответствует полной ширине 100 кГц на полувысоте спектра лазерного излучения при центральной частоте около 200 ТГц. Во-вторых, пространственная когерентность лазерного пучка должна быть близка к той, которую имеет идеальный гауссов пучок, чтобы гарантировалось формирование максимального сигнала биений квадратичным детектором. Сигнал биений связан с разностью частот опорного сигнала и рассеиваемого обратно сигнала, имеющего доплеровский сдвиг. Наконец, относительный шум интенсивности (ОШИ) лазера должен быть ниже сигнала биений на детекторе. Все эти высокие качества обычно встречаются у дорогих объемных лазерах на СО2, например, раскрытых в “Coherent Doppler LIDAR for measurements of wind fields”, Proceedings of IEEE, vol.77, № 3, March 1989, Robert T. Menziez and R. Michael Hardety, или в задающих генераторах с последующим усилителем мощности (усилителем мощности с задающим генератором).
Обычно задающий генератор представляет собой волоконный лазер или диодный лазер во внешней резонаторной установке, а усилитель мощности представляет собой легированное эрбием волокно, накачиваемое диодным модулем накачки большой мощности. Система усилителя мощности с задающим генератором является сложной, с использованием дорогой, объемной, рассредоточенной оптики.
Таким образом, существует необходимость в когерентной лидарной системе, которая может быть основана на недорогом, надежном, интегральном полупроводниковом лазерном узле.
Согласно первому объекту настоящего изобретения упомянутые выше и другие задачи решаются способом определения скорости на основании света, рассеиваемого целью, содержащим этапы, на которых
излучают измерительный пучок электромагнитного излучения и направляют пучок к измерительному объему для освещения цели в измерительном объеме,
формируют опорный пучок,
смешивают опорный пучок со светом, излучаемым от цели в измерительном объеме, освещаемом измерительным пучком, для формирования сигнала скорости, соответствующего скорости цели,
в котором этап излучения измерительного пучка содержит снабжение полупроводниковым лазером для излучения измерительного пучка.
Согласно второму объекту настоящего изобретения упомянутые выше и другие задачи решаются когерентной лидарной системой, содержащей
полупроводниковый лазер для излучения измерительного пучка электромагнитного излучения, направляемого к измерительному объему для освещения цели, такой как частицы, в измерительном объеме,
генератор опорного пучка для формирования опорного пучка, и
детектор для формирования сигнала детектора путем смешения опорного пучка со светом, излучаемым от цели в измерительном объеме, освещаемом измерительным пучком.
Предпочтительно, чтобы когерентная лидарная система содержала процессор сигналов, например процессор сигналов для формирования сигнала скорости, соответствующего скорости цели, на основании сигнала детектора.
Цель может быть любым объектом, способным взаимодействовать со светом, падающим на него, что приводит к излучению света от цели. Целью в измерительном объеме могут быть, например, аэрозоли, такие как капли воды, пыль и т.д., частицы, молекулы, атомы, поверхность объекта, более протяженная, чем ширина измерительного объема, и т.д.
На всем протяжении настоящего раскрытия термин «частицы» включает в себя аэрозоли, молекулы, атомы и т.д.
Процессор сигналов может быть выполнен с возможностью определения температуры в измерительном объеме. Например, процессор сигналов может быть выполнен с возможностью формирования сигнала температуры, соответствующего температуре в измерительном объеме, на основании сигнала детектора.
Процессор сигналов может быть выполнен с возможностью формирования сигнала концентрации, соответствующего концентрации частиц в измерительном объеме, на основании сигнала детектора вместо формирования сигнала скорости, соответствующего скорости цели, на основании сигнала детектора или в сочетании с формированием сигнала скорости.
Согласно осуществлению настоящего изобретения процессор сигналов может быть выполнен с возможностью определения концентрации частиц в измерительном объеме.
Измерение доплеровского сдвига рассеиваемого обратно сигнала из измерительного объема используется для определения скорости частиц. Амплитуда рассеиваемого обратно сигнала с доплеровским сдвигом может использоваться для определения концентрации частиц в измерительном объеме. В соответствии с этим настоящее изобретение можно использовать для измерения концентрации частиц, например пыли. Система, например процессор сигналов, может быть выполнена с возможностью передачи сигнала состояния, показывающего состояние, например, сигнала тревоги, высокого уровня, среднего уровня, низкого уровня и т.д.
В отсутствие потока частиц, то есть при нулевой или очень низкой скорости, доплеровский сдвиг сигнала будет нулевым и амплитуду будет трудно извлекать вследствие наличия других сигналов постоянного тока, поступающих из процесса детектирования. Один путь преодоления этого может быть во введении в систему сдвигающего частоту элемента, например акустооптического модулятора, для сдвига частоты измерительного пучка и/или опорного пучка. Тем самым в принимаемые сигналы может быть добавлено смещение частоты, соответствующее сдвигу частоты, создаваемому сдвигающим частоту элементом. В этом особом случае небольшого или отсутствия потока частиц амплитуда сигнала с нулевым доплеровским сдвигом теперь будет отображаться как амплитуда частотной составляющей, задаваемой сдвигающим частоту элементом.
Согласно третьему объекту настоящего изобретения упомянутые выше и другие задачи решаются способом определения концентрации частиц на основании света, рассеиваемого частицами, содержащим этапы, на которых
излучают измерительный пучок электромагнитного излучения и направляют пучок к измерительному объему для освещения частиц в измерительном объеме,
формируют опорный пучок,
смешивают опорный пучок со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, для формирования сигнала концентрации, соответствующего концентрации частиц,
в котором этап излучения измерительного пучка содержит снабжение полупроводниковым лазером для излучения измерительного пучка.
Сигнал детектора, выводимый с детектора, содержит разностную частоту опорного пучка и света, излучаемого от цели, соответствующую доплеровскому сдвигу, создаваемому движением цели в измерительном объеме. Поэтому пиком спектра мощности из сигнала детектора предоставляется информация о средней скорости цели вдоль направления линии визирования лидарной системы, тогда как шириной спектрального распределения (полной шириной на полувысоте) предоставляется информация о распределении скорости. Вследствие этого, в случае измерений скорости ветра, например, по аэрозолям, взвешенным в воздухе и отслеживающим движение ветра, можно извлекать информацию о турбулентности.
В случае, когда средой, находящейся в измерительном объеме, является газ, можно исследовать рэлеевское рассеяние. Рэлеевское рассеяние возникает в результате упругого взаимодействия между возбуждающим световым пучком и молекулами газа. В этом случае ширина доплеровского спектра соответствует температуре газа. Поэтому температуру газов можно измерять на больших расстояниях. Следует отметить, что по сравнению с сигналами, рассеиваемыми обратно от аэрозолей, сигналы рэлеевского рассеяния обычно на порядок меньше по величине и сильно зависят от конкретной газовой составляющей и длины волны возбуждения (рэлеевское рассеяние является функцией длины волны в степени минус 4). Конкретными газовыми составляющими, представляющими интерес, могут быть кислород, азот, диоксид углерода и газы NOx.
Полупроводниковый лазер может быть полупроводниковым плоскостным лазером с внешним вертикальным резонатором (ППЛВВР), предназначенным для излучения пучка большой мощности. В полупроводниковом плоскостном лазере с внешним вертикальным резонатором электромагнитное излучение излучается перпендикулярно к переходу и поверхности диодного кристалла. Полупроводниковый кристалл или прибор, также называемый усилительным кристаллом, может содержать одно полупроводниковое брэгговское зеркало и активную область (область усиления), обычно с несколькими квантовыми ямами (КЯ). Прибор может иметь общую толщину, составляющую всего несколько микрометров. Лазерный резонатор комплектуется внешним зеркалом.
Большая поперечная площадь полупроводникового плоскостного лазера с внешним вертикальным резонатором способствует работе на основной моде и приводит к высокому качеству пучка. Поперечный диаметр пучка составляет порядка 400 мкм. Кроме того, выходной пучок может иметь круговую симметрию с небольшой степенью астигматизма, приводящую к упрощению формирования изображений.
Лазерная активная среда в электромагнитном резонаторе может накачиваться оптически. Оптическая накачка способствует равномерной накачке больших активных областей. Источником оптической накачки может быть, например, светоизлучающий диод повышенной яркости с торцевым излучателем и кристаллом большой площади или линейка лазерных диодов. При накачке диодной линейкой можно получать выходную мощность, составляющую десятки ватт. Использование внешнего резонатора может облегчить получение дифракционно-ограниченного выходного сигнала.
Согласно осуществлению изобретения полупроводниковый лазер представляет собой полупроводниковый лазер переменного сечения (конусный профиль сечения). Вследствие структуры переменного или конусного сечения полупроводниковый лазер переменного сечения обеспечивает высокую выходную мощность на выходной грани большой площади, имеющей, например, ширину около 250 мкм, при высоком качестве пучка, при этом благодаря гребенчатому волноводу на узком конце, имеющему, например, ширину около 3 мкм, лазер переменного сечения образует одномодовый пространственный фильтр.
Когерентная лидарная система также может содержать полупроводниковый усилитель мощности переменного сечения для усиления пучка, излучаемого полупроводниковым лазером, например, полупроводниковый лазер и усилитель типа полупроводникового усилителя мощности с задающим генератором.
Согласно настоящему изобретению недорогая, компактная, надежная когерентная лидарная система с низким энергопотреблением реализована при использовании полупроводникового лазерного узла, например, на основе геометрий диодных лазеров переменного сечения.
В одном осуществлении изобретения узел усилителя мощности с задающим генератором, состоящий из полупроводникового задающего генератора с последующим полупроводниковым усилителем мощности переменного сечения, которые оба реализованы на одной и той же подложке, представляет собой недорогое, надежное решение, идеальное для промышленных применений при небольшой мощности.
В одном осуществлении изобретения полупроводниковым узлом переменного сечения обеспечивается выходная мощность около 1 Вт, даже при длине волны 1,5 мкм, на которой преобразование электронов в фотоны является менее эффективным по сравнению с диапазоном 800 нм. Длина волны 1,5 мкм или более длинная является важной для практического использования лидара, поскольку 1,5 мкм находится в пределах безопасного для глаз диапазона оптического спектра. Требования по безопасности лазера во время работы легче удовлетворяются при работе на безопасной для глаз длине волны.
Кроме того, временная когерентность полупроводниковых лазерных узлов переменного сечения, то есть длина когерентности, является достаточной для применений когерентного лидара. Эта деликатная особенность является существенной для метода гомодинного детектирования, используемого для извлечения рассеиваемого обратно сигнала с доплеровским сдвигом.
Более того, даже если пространственная когерентность полупроводниковых приборов переменного сечения неидеальна по сравнению с дифракционно-ограниченным гауссовым пучком, излучение лазерного узла является достаточно качественным для использования в лидарной системе. При пространственной фильтрации опорного пучка можно удалять или ослаблять негауссовы пространственные составляющие опорного пучка, которые в противном случае могут приводить к снижению отношения сигнал/шум сигнала детектора. В одном осуществлении пространственную фильтрацию выполняют в плоскости Фурье, где гауссова часть легко изолируется пространственно.
В одном осуществлении изобретения при работе лидарной системы сигнал обратной связи подается на лазерный узел непосредственно с детектора. В случае, когда лазерный узел не работает в одночастотном режиме, длина когерентности резко изменяется. В результате доплеровский сигнал лидара пропадает. Путем подстройки, например, температуры или тока лазерного узла одночастотную работу можно восстанавливать и к тому же оптимизировать при максимизации измеряемого доплеровского сигнала. Следует отметить, что длина когерентности лазерного узла очень чувствительна даже к небольшим изменениям задаваемых параметров. В другом осуществлении шумовой сигнал с детектора используется для обнаружения характеристик лазера. Замечено, что шум лазерного узла значительно возрастает при уменьшении сигнала лидара. Считается, что уменьшение сигнала лидара обусловлено многомодовым режимом работы лазерного узла. Тонкой подстройкой параметров лазера, например тока или температуры, сигнал лидара можно повысить или повторно оптимизировать. Кроме того, сигнал измерителя постоянного тока можно использовать для управления, поскольку переход от предпочтительного одночастотного режима к многомодовой работе сопровождается изменением значения мощности постоянного тока лазерного узла. Поэтому, воспринимая сигнал постоянного тока с измерителя, можно получать сигнал управления. В еще одном осуществлении лазерный узел активно или пассивно синхронизирован с внешним резонатором для стабилизации частоты лазера.
В соответствии с настоящим изобретением можно реализовывать многочисленные различные когерентные лидарные системы, например когерентный бистатический лидар.
Упомянутые выше и другие признаки и преимущества настоящего изобретения станут полностью очевидными для специалистов в данной области техники из следующего подробного описания примеров осуществления его при обращении к сопровождающим чертежам, на которых:
фиг.1 - схематичный вид одного осуществления изобретения;
фиг.2 - схематичный вид полупроводникового диодного лазера с внешним резонатором;
фиг.3 - схематичный вид другого осуществления изобретения;
фиг.4 - схематичный вид осуществления изобретения, включающего в себя точечную диафрагму;
фиг.5 - схематичный вид осуществления изобретения, включающего в себя систему обратной связи;
фиг.6 - схематичный вид еще одного осуществления изобретения;
фиг.7 - схематичный вид осуществления из фиг.6 с добавленным клиновидным элементом обратной связи;
фиг.8 - схематичный вид еще одного осуществления изобретения;
фиг.9 - график спектра мощности полупроводникового усилителя мощности с задающим генератором; и
фиг.10 - график спектра доплеровских частот, измеренного для случая осуществления из фиг.6.
Для ясности чертежи выполнены схематичными и упрощенными и на них показаны только те детали, которые являются существенными для понимания изобретения, тогда как прочие детали опущены. Повсюду одни и те же позиции использованы для идентичных или соответствующих частей.
Теперь ниже настоящее изобретение будет описано более полно с обращением к сопровождающим чертежам, на которых показаны примеры осуществлений изобретения. Однако изобретение может быть реализовано в различных вариантах и не должно толковаться как ограниченное осуществлениями, изложенными в этой заявке. Точнее, эти осуществления представлены так, что это раскрытие является полным и законченным, а для специалистов в данной области техники полностью выражает концепцию изобретения.
На фиг.1 схематично показан когерентный лидар согласно одному предпочтительному осуществлению изобретения. Полупроводниковый лазер 1 излучает первый когерентный световой пучок 4 с высоким пространственным и спектральным качеством пучка. Накачка полупроводникового лазера осуществляется током, подводимым с помощью электрода 27.
Высокое пространственное качество, то есть гауссов профиль пучка, получается благодаря поддержанию небольших поперечных размеров резонатора полупроводникового лазера 1, обычно порядка 1 на 5 мкм. Если поперечные размеры резонатора увеличивать, чтобы повышать выходную мощность излучения в пучке 4, то в конечном счете пучок 4 станет многомодовым, соответственно менее высокого пространственного качества, существенной характеристики для когерентных лидаров. Если ток, подводимый к электроду 27, непрерывно повышать, получающееся в результате возрастание интенсивности излучения лазера 1 будет способствовать разрушению лазера. Поэтому выходная мощность диодного лазера с единственной поперечной модой обычно ограничена величиной 200 Вт. Для дополнительного повышения выходной мощности добавлен полупроводниковый усилитель 22 мощности переменного или конусного сечения. Ток для этого устройства подводится по электроду 26. Путем расчета усилительной структуры переменного сечения соответственно углу расхождения выходного пучка 4 можно значительно усилить выходной пучок 4 при сохранении качества пучка лазера 1. Обычно измерительный пучок 14 представляет собой дифракционно-ограниченный в 1,3-2 раза гауссов пучок. Поскольку поперечные размеры усилителя увеличиваются, по мере того как лазерный пучок 4 распространяется через усилитель переменного сечения, интенсивность света может поддерживаться на безопасном уровне, потому что интенсивность сохраняется низкой. Исходя из того, что поперечные размеры волновода являются постоянными (1 на 5 мкм), усилитель переменного сечения на выходной грани имеет широкую выходную апертуру, 1 на 200 мкм. После усиления выходная мощность излучения в пучке 4 из лазера составляет порядка 1 Вт, что соответствует применениям когерентного лидара.
Путем дополнительного включения частотно-избирательных элементов 28а и 28b в полупроводниковую лазерную структуру лазера 1 из показанного осуществления количество продольных мод колебаний лазера можно уменьшить до всего одной. Частотные элементы могут быть распределенными решетками, показанными на фиг.1, а также, например, эталонами. Посредством них ширину линии (спектр полной ширины на полувысоте) лазера 1 можно резко уменьшать от около 1000 ГГц до около 100 кГц, что соответствует длине когерентности порядка 1 км. Эта длина когерентности хорошо соответствует применению когерентного лидара. Кроме того, в осуществлении, показанном на фиг.1, решетки 28а и 28b служат зеркалами для лазера 1. При соответствующем проектировании решетки 28а можно также формировать опорный пучок 23. Этот пучок 23 направлен к детектору 11. Таким образом, в показанном осуществлении лазер 1 также генерирует опорный пучок 23.
На всем протяжении настоящего раскрытия показанный источник света означает полупроводниковый усилитель мощности с задающим генератором. Полупроводниковый лазер 1 образует задающий генератор (ЗГ), а полупроводниковый усилитель 22 переменного сечения образует усилитель мощности (УМ) переменного сечения. Для образования интегрального лазерного узла лазер 1, а также усилитель 22 переменного сечения можно собирать на одной подложке 21. Размеры собранного лазерного узла, включая держатель подложки, составляют порядка 4×6×8 мм. Лазерный узел можно изготавливать, используя технологию производства больших полупроводниковых пластин.
Измерительный пучок 14 фокусируют на измерительный объем 15, используя изображающую оптику 20. Изображающая оптика 20 может быть телескопом Галилея или Кеплера. Когда (движущиеся) цели в измерительном объеме 15 освещаются измерительным пучком 14, цели излучают небольшое количество света 24 к детектору 11 когерентного лидара. Если цели представляют собой аэрозоли, отражаемый или рассеиваемый обратно свет имеет мощность порядка 1 ПВт при освещении измерительным пучком 14 мощностью 1 Вт.
Затем отражаемый обратно свет 24 проходит через изображающую оптику 20, усилитель 22 переменного сечения и лазер 1. Поскольку лазер 1 представляет собой волновод, поддерживающий только единственную поперечную пространственную моду, то отражаемый обратно пучок теперь пространственно фильтруется. Затем пространственно фильтрованный пучок 25 смешивается с опорным пучком 23 оптическим детектором 11 с формированием измерительного сигнала. Следует отметить, что отражаемый обратно пучок также усиливается во время прохождения усилителя 22 и лазера 1. Измерительный сигнал содержит спектральные составляющие, соответствующие разностной частоте между измерительным пучком 14 и отражаемым обратно пучком 24. Разностная частота соответствует доплеровской частоте целей в измерительном объеме 15, движущихся относительно когерентного лидара. Путем обработки измерительного сигнала с использованием процессора сигналов можно вычислять соответствующие скорости целей.
В показанном осуществлении два пространственно фильтрованных пучка 23 и 24 смешиваются на детекторе. Тем самым другие пространственные составляющие пучков, создаваемых лазерным узлом, которые не являются полностью дифракционно-ограниченными, ослабляются или удаляются пространственной фильтрацией, так что нежелательные помеха и шум в сигнале детектора снижаются, вследствие чего повышается отношение сигнал/шум сигнала детектора.
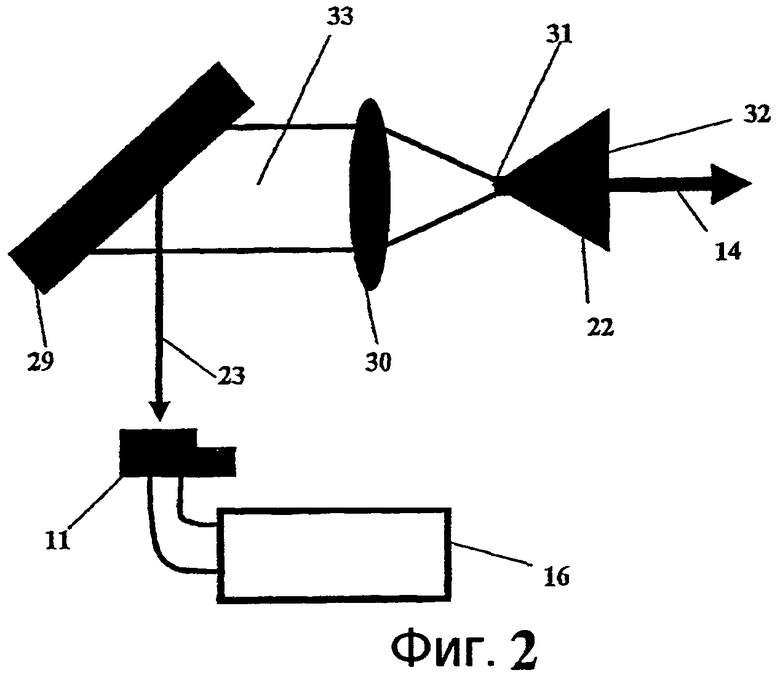
На фиг.2 схематично показано осуществление изобретения с полупроводниковым лазерным источником света, работающим в автодинной конфигурации, где свет, рассеиваемый обратно от цели в измерительном объеме 15, передается обратно в полупроводниковый лазер и вследствие этого изменяет выходную мощность полупроводникового лазера, которую можно контролировать на заднем конце лазера. Поэтому в показанном осуществлении полупроводниковый лазер 22 переменного сечения взаимодействует с внешним резонатором, образованным между дифракционным оптическим элементом 29, таким как голографический оптический элемент 29, который выполнен с возможностью отражения небольшой части света 23 к детектору 11 для контроля упомянутых выше изменений и отражения остальной части 33 света обратно к другому отражателю внешнего резонатора, образованному имеющей покрытие выходной гранью 32 лазера 22 переменного сечения. Вследствие структуры переменного сечения полупроводниковый лазер 22 переменного сечения обеспечивает высокую выходную мощность на выходной грани большой площади, например, имеющей ширину около 250 мкм, при высоком качестве пучка, поскольку гребенчатый волновод на узком конце 31, например, имеющий ширину около 3 мкм, лазера 22 переменного сечения образует одномодовый пространственный фильтр. Линза 30 коллимирует свет 33. Процессор сигналов выполнен с возможностью извлечения доплеровской частоты из контрольного сигнала 23.
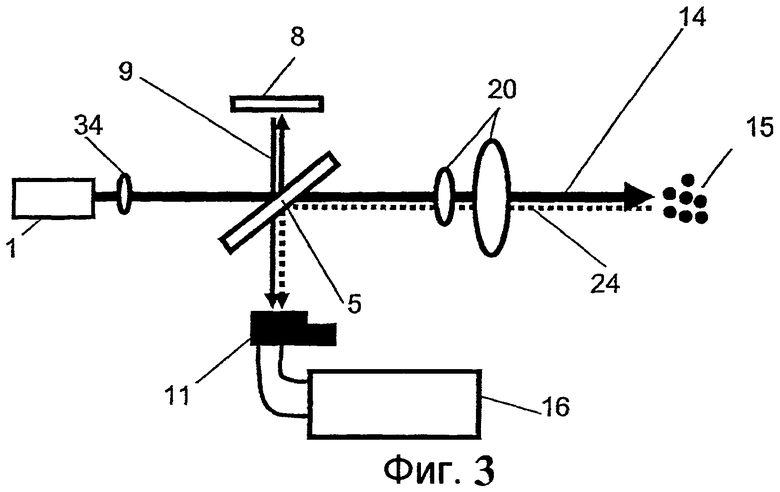
На фиг.3 схематично показано осуществление изобретения, включающее в себя одномодовый полупроводниковый лазер 1. Оптическое выходное излучение лазера 1 коллимируется линзовой системой 34. Получающееся коллимированное оптическое выходное излучение 4 является p-поляризованным и частично передается через расщепитель 5 пучка. Расщепитель 5 пучка имеет окно Брюстера, которое имеет покрытие, для передачи p-поляризованного света из полупроводникового лазера 1 и для отражения s-поляризованного света, чтобы формировать опорный пучок 9, и следовательно, расщепитель 5 пучка также функционирует как генератор опорного пучка. Четвертьволновая двулучепреломляющая оптическая пластинка (непоказанная) расположена после расщепителя 5 пучка для преобразования проходящего p-поляризованного света в свет с круговой поляризацией, чтобы формировать измерительный пучок 14. Телескоп 20 фокусирует измерительный пучок 14 на измерительный объем 15 с целью, в настоящем примере образованной частицами, взвешенными в воздухе. Частицы рассеивают в обратном направлении свет с круговой поляризацией, который принимается тем же самым телескопом 20, также используемым в передающей части, и передается обратно к четвертьволновой пластинке, которая преобразует свет с круговой поляризацией в s-поляризованный свет для отражения окном Брюстера к детектору 11. Еще одна четвертьволновая пластинка (непоказанная) преобразует s-поляризованный свет, отражаемый от расщепителя 5 пучка, в свет с круговой поляризацией, а отражатель 8 отражает опорный пучок 9 обратно через четвертьволновую пластинку, которая преобразует свет с круговой поляризацией в s-поляризованный свет для передачи через расщепитель пучка к детектору 11. Детектор 11 смешивает опорный пучок 9 с рассеиваемым обратно светом от частиц, а процессор 16 сигналов извлекает разностную частоту, то есть доплеровскую частоту, и преобразует разностную частоту в составляющую скорости частиц в направлении измерительного пучка, которая предполагается идентичной составляющей скорости ветра в направлении измерительного пучка.
Преимущества этой системы являются многочисленными, например, только один полупроводниковый лазер требуется для генерации достаточной оптической мощности, необходимой для обнаружения доплеровского сигнала. Комбинация поляризующего расщепителя 5 пучка и четвертьволновых пластинок (непоказанных) также действует как объединитель пучков для направления опорного пучка 9 и принимаемого сигнального пучка к детектору 11.
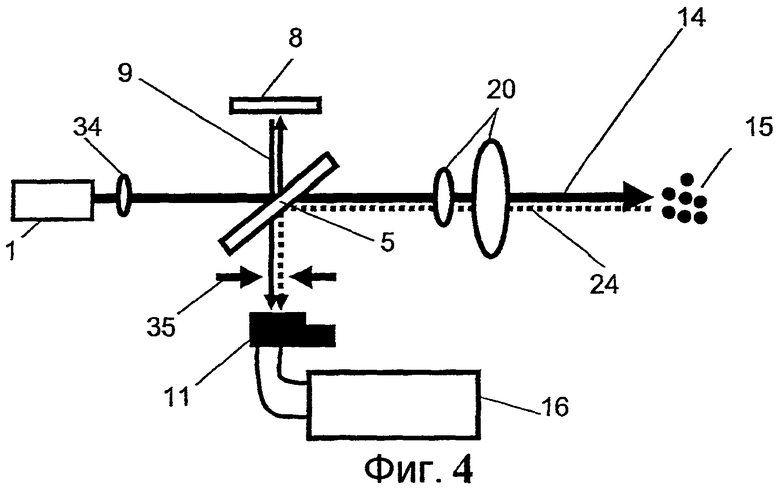
На фиг.4 схематично показано еще одно осуществление изобретения, аналогичное осуществлению из фиг.3, за исключением того, что в осуществлении из фиг.4 к тому же имеется точечная диафрагма 35. На оптическом выходе полупроводникового лазера 1 не образуется чисто гауссова мода ТЕМ00. В гомодинной системе смешения, использованной в показанном осуществлении, только гауссова часть пучков вносит вклад в обнаружение доплеровского сигнала. Поэтому пространственная фильтрация выходного оптического излучения лазера является полезной. Обычно пространственную фильтрацию выходного оптического излучения лазера можно выполнять, фокусируя свет на оптическое волокно или используя линзу и точечную диафрагму в качестве пространственного фильтра. В показанном осуществлении пространственная фильтрация излучаемого измерительного пучка выполняется по существу телескопом 20. В области фокусировки фокусирующего телескопа 20 телескоп работает как оптический блок преобразования Фурье, который формирует сфокусированный измерительный объем только по гауссовой части выходного излучения лазера. Более высокие пространственные негауссовы частоты локализуются за пределами центра этого измерительного объема и не вносят вклада в оптический сигнал, принимаемый телескопом. Опорный пучок 9, получаемый непосредственно из выходного оптического излучения лазера, пространственно фильтруется благодаря использованию согласованного сочетания фокусного расстояния фокусирующей линзы 10 (непоказанной) и размера точечной диафрагмы 35. Линза 10 действует как линза пространственного преобразования Фурье в случае, когда точечная диафрагма 35 расположена в фокальной плоскости линзы. При выборе площади точечной диафрагмы 35, равной размеру центральной гауссовой части преобразования Фурье опорного пучка 9, только эта часть пучка 9 будет взаимодействовать с сигнальным пучком и вносить вклад в обнаруживаемый доплеровский сигнал. Более высокие пространственные частоты будут попадать за пределы точечной диафрагмы 35 и не будут обнаруживаться, и не будут мешать процессу обнаружения.
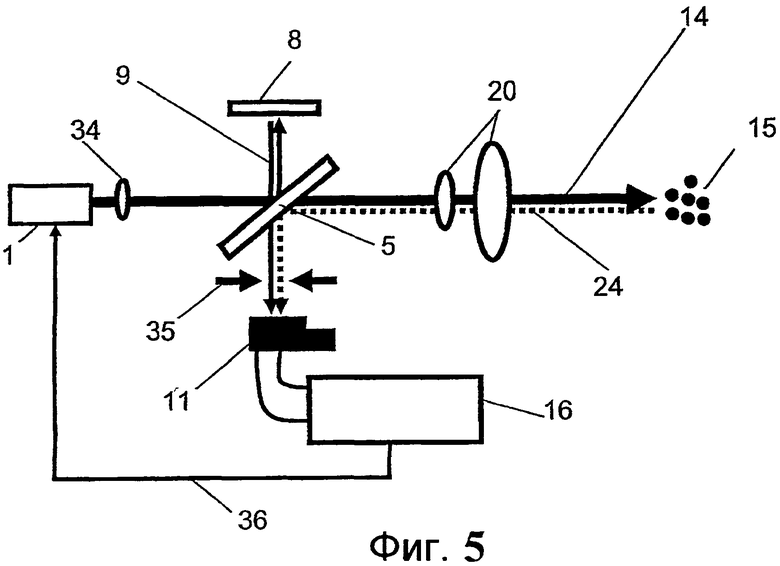
На фиг.5 схематично показано осуществление изобретения, аналогичное осуществлению из фиг.3 или фиг.4, за исключением того, что в осуществлении из фиг.5 к тому же имеется выход 36 управления с процессора 16 для регулирования управляющих параметров полупроводникового лазерного узла, таких как ток питания, температура и т.д., или любого сочетания управляющих параметров во время работы лидарной системы, например, в ответ на сигнал детектора. Например, когда лазерный узел не работает в одночастотном режиме, длина когерентности резко изменяется. В результате доплеровский сигнал лидара пропадает. Подстройкой, например, температуры или тока лазерного узла 1 одночастотную работу можно восстановить и к тому же оптимизировать при максимизации измеряемого доплеровского сигнала. Следует отметить, что длина когерентности лазерного узла очень чувствительна даже к небольшим изменениям задаваемых параметров.
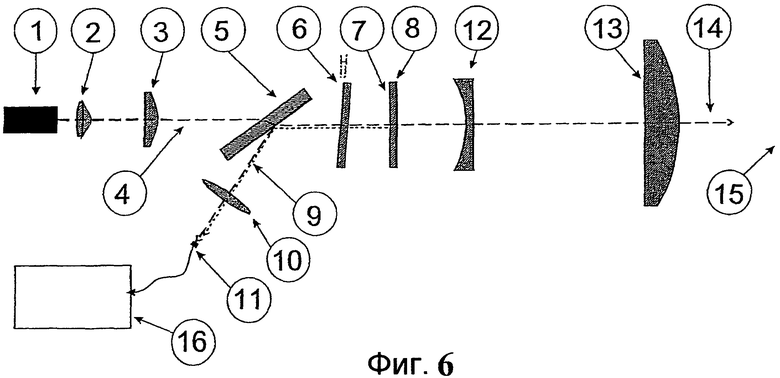
На фиг.6 схематично показано осуществление изобретения, включающее в себя одномодовый полупроводниковый лазер 1. Оптическое выходное излучение лазера 1 коллимируется в обоих направлениях линзой 2 и цилиндрической линзой 3. Получающееся в результате коллимированное оптическое выходное излучение 4 является линейно TM-поляризованным и полностью проходит через поляризующий расщепитель 5 пучка. Четвертьволновая пластинка 6 поворачивает проходящее оптическое выходное излучение до состояния круговой поляризации. Для исключения обратных отражений, достигающих лазера, четвертьволновая пластинка 6 слегка наклонена. Поверхность 7 частично отражающего опорного окна 8 имеет покрытие для обратного отражения определенной процентной части выходного оптического излучения лазера. Отражаемый обратно пучок проходит в обратном направлении через четвертьволновую пластинку 6, где он становится линейно TE-поляризованным. Этот TE-поляризованный пучок полностью отражается поверхностью поляризующего расщепителя 5 пучка и образует опорный пучок 9. Опорный пучок 9 фокусируется линзой 10 на детектор 11. Основная процентная часть выходного оптического излучения лазера проходит в виде света с круговой поляризацией через опорное окно 8 и расширяется и фокусируется линзами 12 и 13 телескопа. Излучаемый измерительный пучок 14 фокусируется на измерительный объем 15 (непоказанный). Фокусным расстоянием телескопа для системы задается дистанция измерения. Частицы или аэрозоли в измерительном объеме 15 имеют составляющую скорости, направленную вдоль пути распространения излучаемого измерительного пучка 14. Рассеянный обратно и несущий сигнал с доплеровским сдвигом пучок из измерительного объема принимается тем же самым телескопом (линзами 13 и 12), также используемым в передающей части, и проходит обратно через опорное окно 8 и дальше через четвертьволновую пластинку 6, которая, в свою очередь, изменяет состояние поляризации светового сигнального пучка, чтобы он стал TE-поляризованным. Кроме того, поляризующий расщепитель пучка полностью отражает принимаемый световой сигнальный пучок так, чтобы он точно совместился с опорным пучком 9 и следовал вместе с ним через фокусирующую линзу 10, которая фокусирует оба пучка на детектор 11. Поверхность детектора слегка наклонена для исключения обратного распространения любых обратных отражений в оптический путь системы. Принимаемый оптический сигнал и опорный пучок образуют изменяющийся во времени оптический интерференционный сигнал на поверхности детектора, который в добавление к процессу детектирования на детекторе обеспечивает гомодинное детектирование доплеровской частоты принимаемого сигнала. Средство детектирования преобразует оптический сигнал в электрический доплеровский сигнал. Электрический доплеровский сигнал с детектора 11 дополнительно усиливается и подвергается анализу Фурье в процессоре 16 сигналов.
Преимущества этой системы являются многочисленными. Только один полупроводниковый лазер требуется для генерации достаточной оптической мощности, необходимой для обнаружения доплеровского сигнала. Комбинация поляризующего расщепителя 5 пучка и четвертьволновой пластинки 6 действует как устройство направления пучков, предназначенное для направления всей оптической мощности из опорного пучка 9 и принимаемого сигнального пучка к детектору 11. Кроме того, та же самая комбинация поляризующего расщепителя 5 пучка и четвертьволновой пластинки 6 действует как оптический вентиль, который предотвращает распространение любой возвращающейся оптической мощности к лазеру 1. На оптическом выходе полупроводникового лазера 1 не образуется чисто гауссова мода ТЕМ00. В гомодинной системе смешения, представленной здесь, только гауссова часть пучков вносит вклад в детектирование доплеровского сигнала. Поэтому пространственная фильтрация выходного оптического излучения лазера является необходимой. Обычно пространственную фильтрацию выходного оптического излучения лазера можно выполнять, фокусируя свет в оптическое волокно или используя линзу и точечную диафрагму в качестве пространственного фильтра. Однако пространственная фильтрация выходного оптического излучения лазера по существу встроена в конструкцию следующим образом. При рассмотрении излучаемого измерительного пучка в области фокусировки фокусирующего телескопа (линзы 12 и 13) можно видеть, что телескоп работает как оптический блок преобразования Фурье, который формирует сфокусированный измерительный объем только по гауссовой части выходного излучения лазера. Более высокие пространственные негауссовы частоты локализуются за пределами центра этого измерительного объема и впоследствии не вносят вклада в оптический сигнал, принимаемый телескопом. Опорный пучок 9, получаемый непосредственно из выходного оптического излучения лазера, пространственно фильтруется благодаря использованию согласованного сочетания фокусного расстояния фокусирующей линзы 10 и размера области детектора 11. Линза 10 действует как линза пространственного преобразования Фурье в случае, когда область детектора 11 расположена в фокальной плоскости линзы. При выборе области детектора, равной размеру центральной гауссовой части преобразования Фурье опорного пучка, только эта часть пучка будет взаимодействовать с сигнальным пучком и вносить вклад в обнаруживаемый доплеровский сигнал. Более высокие пространственные частоты будут попадать за пределы области детектора и не будут детектироваться, и не будут мешать процессу детектирования.
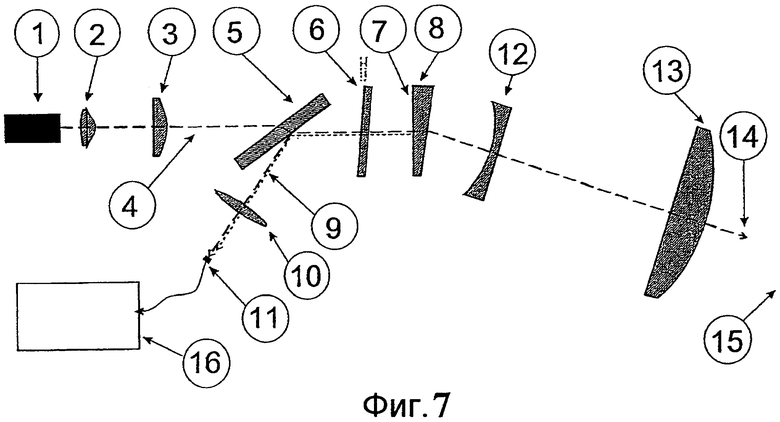
На фиг.7 схематично показана лидарная система согласно еще одному осуществлению настоящего изобретения. Принцип является таким же, как и на фиг.6, за исключением того, что опорный пучок создается при замене опорного окна клином 8, при этом, чтобы опорный пучок 9 формировался, первая поверхность 7 клина имеет покрытие для обратного отражения определенной процентной части выходного оптического излучения лазера. Преимущество этой системы заключается в исключении обратных отражений от второй поверхности опорного окна. Тем самым фактическая мощность оптического опорного пучка может точно контролироваться.
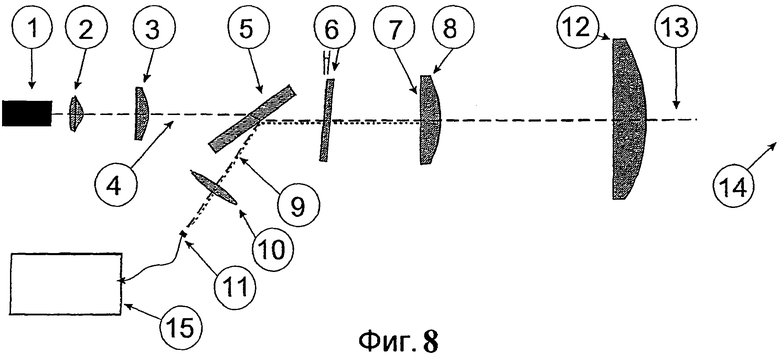
На фиг.8 схематично показана лидарная система согласно еще одному осуществлению настоящего изобретения. Принцип является таким же, как и на фиг.6, за исключением того, что опорный пучок создается плоской поверхностью 7 на первой линзе в телескопе, которая имеет покрытие для обратного отражения определенной процентной части выходного оптического излучения лазера, чтобы формировать опорный пучок 9. Преимуществом этой системы является упрощение вследствие небольшого количества оптических компонентов. Однако недостаток этой системы заключается в том, что если большую линзу телескопа 12 не перемещать, телескоп необходимо фиксировать на заранее установленную дистанцию измерения.
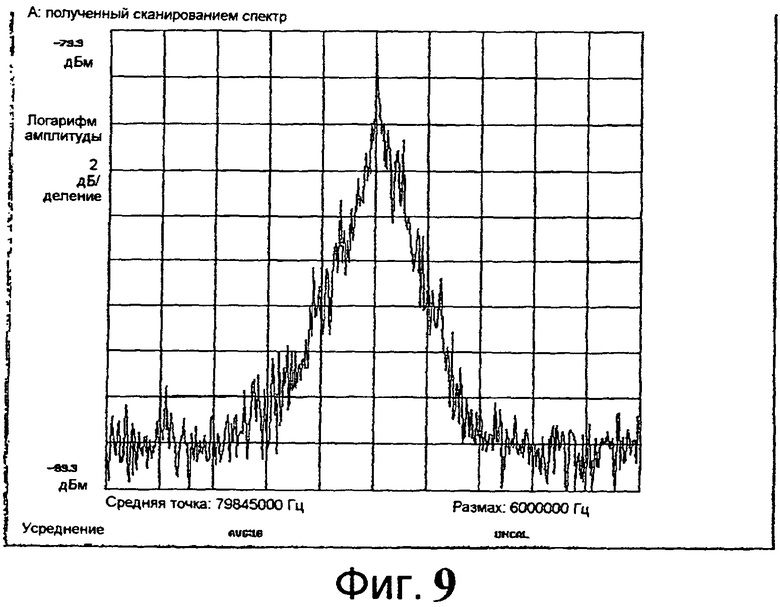
На фиг.9 представлен график спектра мощности полупроводникового усилителя мощности с задающим генератором, используемого в осуществлении настоящего изобретения. На полувысоте он имеет полную ширину 100 кГц, что соответствует длине когерентности около 900 м.
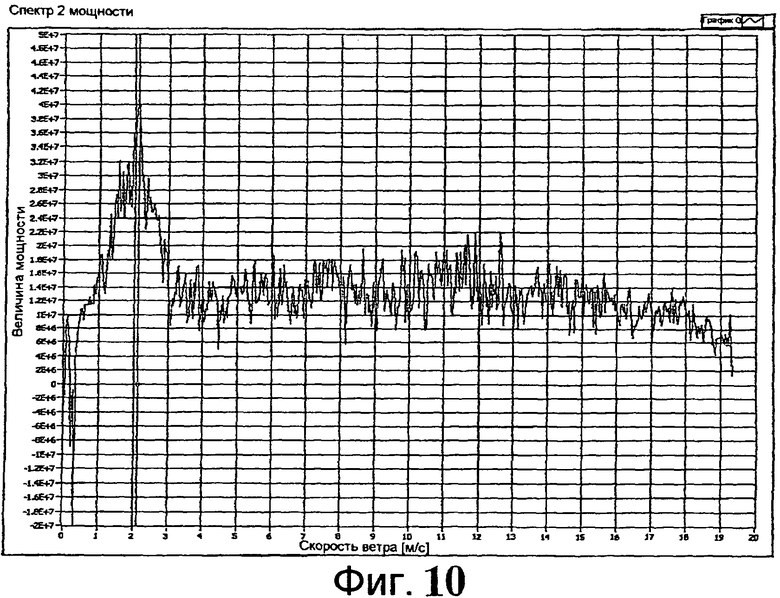
На фиг.10 представлен график спектра доплеровских частот, измеренного для осуществления из фиг.6. Доплеровская частота преобразована в скорость ветра, которая нанесена на график по оси x, а мощность сигнала нанесена на график по оси y. Измерительный пучок фокусировали в дневное время на расстояние 40 м при низкой скорости ветра.
Каждое из раскрытых осуществлений можно модифицировать, чтобы включить первое оптическое волокно для передачи измерительного пучка от источника света к телескопу и второе оптическое волокно для передачи света, излучаемого от цели в измерительном объеме, к детектору, при этом место нахождения телескопа может быть физически удалено от источника света и детектора, и других компонентов лидарной системы. Первое и второе оптические волокна можно объединить в одно оптическое волокно. Кроме того, показанные оптические компоненты можно заменить соответствующими волоконно-оптическими компонентами. Например, расщепители 5 пучка на фигурах 3-8 можно заменить волоконно-оптическим устройством ввода-вывода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| ЛИДАРНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2744932C1 |
| Способ и лидарная система для обнаружения ориентированных ледяных кристаллов в атмосфере | 2023 |
|
RU2813096C1 |
| ЛИДАРНАЯ СИСТЕМА ДЛЯ АНЕМОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ | 2020 |
|
RU2799037C1 |
| ДЕТЕКТОР И СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ | 2007 |
|
RU2458352C2 |
| СИСТЕМА РАННЕГО ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТИ ПЕРЕД ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2373554C2 |
| ДОПЛЕРОВСКИЙ СКАНИРУЮЩИЙ ЛИДАР БОРТОВОГО БАЗИРОВАНИЯ | 2017 |
|
RU2655040C1 |
| ЛИДАР ДИФФЕРЕНЦИАЛЬНОГО ПОГЛОЩЕНИЯ НА МОБИЛЬНОМ НОСИТЕЛЕ | 2013 |
|
RU2567469C2 |
| Способ лидарного зондирования и устройство для его осуществления | 2013 |
|
RU2692121C2 |
| Лазерный измеритель размеров и дисперсного состава частиц | 1986 |
|
SU1363022A1 |
Когерентная лидарная система содержит полностью полупроводниковый лазерный узел для излучения измерительного пучка электромагнитного излучения, направляемого к измерительному объему для освещения частиц в измерительном объеме, генератор опорного пучка для формирования опорного пучка, детектор для формирования сигнала детектора путем смешения опорного пучка со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, и процессор сигналов для формирования сигнала скорости, соответствующего скорости частиц, на основании сигнала детектора. Технический результат - понижение уровня шума, повышение надежности обнаружения. 5 н. и 34 з.п. ф-лы, 10 ил.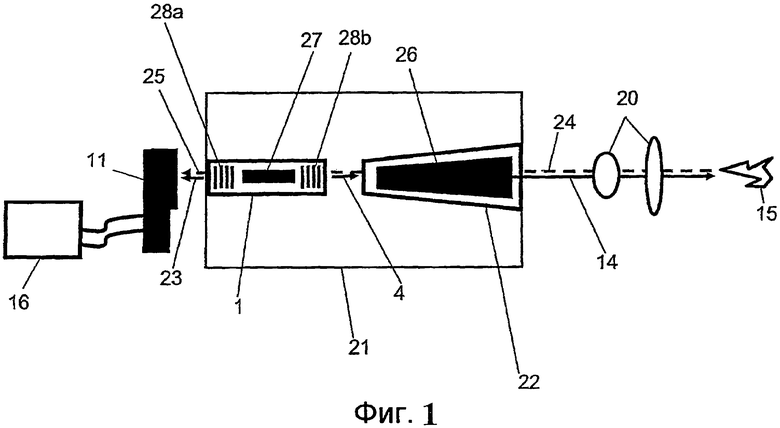
1. Когерентная лидарная система, содержащая
полностью полупроводниковый лазерный узел для излучения измерительного пучка электромагнитного излучения, направляемого к измерительному объему для освещения частиц в измерительном объеме,
генератор опорного пучка для формирования опорного пучка,
детектор для формирования сигнала детектора путем смешения опорного пучка со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, и
процессор сигналов для формирования сигнала скорости, соответствующего скорости частиц, на основании сигнала детектора.
2. Когерентная лидарная система по п.1, в которой процессор сигналов дополнительно выполнен с возможностью определения скорости ветра.
3. Когерентная лидарная система по п.1 или 2, в которой процессор сигналов дополнительно выполнен с возможностью определения турбулентности в измерительном объеме.
4. Когерентная лидарная система по п.1, в которой процессор сигналов дополнительно выполнен с возможностью определения температуры в измерительном объеме.
5. Когерентная лидарная система по п.1, в которой процессор сигналов выполнен с возможностью формирования сигнала концентрации, соответствующего концентрации частиц в измерительном объеме, на основании сигнала детектора.
6. Когерентная лидарная система по п.1, в которой процессор сигналов выполнен с возможностью определения концентрации частиц в измерительном объеме.
7. Когерентная лидарная система по п.1, дополнительно содержащая оптическое волокно для передачи измерительного пучка между полностью полупроводниковым лазерным узлом и оптическим выходом лидарной системы.
8. Когерентная лидарная система по п.1, в которой полностью полупроводниковый лазерный узел содержит полупроводниковый лазер переменного сечения.
9. Когерентная лидарная система по п.1, в которой полностью полупроводниковый лазерный узел содержит полупроводниковый лазер и полупроводниковый усилитель мощности переменного сечения для усиления пучка, излучаемого полупроводниковым лазером.
10. Когерентная лидарная система по п.9, в которой полупроводниковый лазер является типичным образцом полупроводникового усилителя мощности с задающим генератором.
11. Когерентная лидарная система по п.10, в которой лазер типа полупроводникового усилителя мощности с задающим генератором содержит полупроводниковый кристалл с задающим генератором с распределенной обратной связью и полупроводниковым усилителем мощности переменного сечения.
12. Когерентная лидарная система по п.1, в которой генератор опорного пучка представляет собой расщепитель пучка для разделения пучка, излучаемого полностью полупроводниковым лазерным узлом, на опорный пучок и измерительный пучок, направляемый к измерительному объему.
13. Когерентная лидарная система по п.1, в которой генератор опорного пучка представляет собой полностью полупроводниковый лазерный узел, который выполнен с возможностью излучения опорного пучка и измерительного пучка.
14. Когерентная лидарная система по п.1, дополнительно содержащая пространственный фильтр для фильтрации опорного пучка, благодаря чему ослабляются негауссовы пространственные составляющие опорного пучка.
15. Когерентная лидарная система по п.14, дополнительно содержащая линзу Фурье, расположенную на пути распространения опорного пучка, и в которой пространственный фильтр расположен в плоскости Фурье линзы Фурье для ослабления негауссовых пространственных составляющих опорного пучка.
16. Когерентная лидарная система по п.14 или 15, в которой пространственный фильтр содержит апертуру, размер которой согласован с размером детектора.
17. Когерентная лидарная система по п.1, дополнительно содержащая объединитель пучков для объединения опорного пучка со светом, излучаемым от цели.
18. Когерентная лидарная система по п.17, в которой измерительный пучок является р-поляризованным, а расщепитель пучка и объединитель пучков представляют собой один блок, содержащий
окно Брюстера, которое имеет покрытие для пропускания р-поляризованного света от полностью полупроводникового лазерного узла и для отражения s-поляризованного света,
четвертьволновую двулучепреломляющую оптическую пластинку для преобразования р-поляризованного света в свет круговой поляризации, чтобы формировать измерительный пучок и преобразовывать свет с круговой поляризацией от частиц в s-поляризованный свет для отражения окном Брюстера, и при этом
расщепитель пучка содержит отражатель для отражения части измерительного пучка, чтобы формировать опорный пучок, и для направления опорного пучка обратно через четвертьволновую пластинку для отражения к детектору.
19. Когерентная лидарная система по п.1, в которой полностью полупроводниковый лазерный узел выполнен управляемым в ответ на сигнал с детектора для оптимизации выходной мощности полностью полупроводникового лазерного узла.
20. Когерентная лидарная система по п.1, содержащая устройство очистки пучка с одномодовым волокном, формирующим измерительный пучок.
21. Когерентная лидарная система по п.20, в которой устройство очистки пучка содержит фокусирующую линзу, точечную диафрагму и коллимирующую линзу.
22. Когерентная лидарная система по п.1, содержащая сдвигающий частоту элемент для сдвига частоты измерительного пучка или опорного пучка.
23. Ветровая турбина, содержащая когерентную лидарную систему по любому из предшествующих пунктов.
24. Парусное судно, содержащее когерентную лидарную систему по любому из пп.1-22.
25. Способ определения скорости частиц на основании света, рассеиваемого частицами, содержащий этапы, на которых
излучают измерительный пучок электромагнитного излучения и направляют пучок к измерительному объему для освещения частиц в измерительном объеме,
формируют опорный пучок,
смешивают опорный пучок со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, для формирования сигнала скорости, соответствующего скорости частиц,
в котором этап излучения измерительного пучка содержит снабжение полностью полупроводниковым лазерным узлом для излучения измерительного пучка.
26. Способ по п.25, в котором этап формирования опорного пучка содержит этап разделения пучка, излучаемого полностью полупроводниковым лазерным узлом, на опорный пучок и измерительный пучок, направляемый к измерительному объему.
27. Способ по п.25, в котором этап формирования опорного пучка содержит этап снабжения полностью полупроводниковым лазерным узлом, который выполнен с возможностью излучения опорного пучка и измерительного пучка.
28. Способ по любому из пп.25-27, дополнительно содержащий этап смешения опорного пучка со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, для формирования сигнала температуры, соответствующего температуре в измерительном объеме.
29. Способ по любому из пп.25-27, дополнительно содержащий этап смешения опорного пучка со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, для формирования сигнала концентрации, соответствующего концентрации частиц в измерительном объеме.
30. Способ по любому из пп.25-27, дополнительно содержащий этап пространственной фильтрации опорного пучка, благодаря чему ослабляются негауссовы пространственные составляющие опорного пучка.
31. Способ по любому из пп.25-27, дополнительно содержащий этап выполнения очистки пучка путем снабжения одномодовым волокном, формирующим измерительный пучок.
32. Способ по п.23, дополнительно содержащий этап регулирования шага лопастей ветровой турбины в ответ на определенный сигнал скорости.
33. Способ по п.24, дополнительно содержащий этап дифферентовки парусного судна в ответ на определенный сигнал скорости.
34. Способ определения концентрации частиц на основании света, рассеиваемого частицами, содержащий этапы, на которых
излучают измерительный пучок электромагнитного излучения и направляют пучок к измерительному объему для освещения частиц в измерительном объеме, формируют опорный пучок,
смешивают опорный пучок со светом, излучаемым от частиц в измерительном объеме, освещаемом измерительным пучком, для формирования сигнала концентрации, соответствующего концентрации частиц,
в котором этап излучения измерительного пучка содержит обеспечение полностью полупроводникового лазерного узла для излучения измерительного пучка.
35. Способ по п.34, в котором этап формирования опорного пучка содержит этап разделения пучка, излучаемого полностью полупроводниковым лазерным узлом, на опорный пучок и измерительный пучок, направляемый к измерительному объему.
36. Способ по п.34, в котором этап формирования опорного пучка содержит этап обеспечения полностью полупроводникового лазерного узла, который выполнен с возможностью излучения опорного пучка и измерительного пучка.
37. Способ по любому из пп.34-36, дополнительно содержащий этап пространственной фильтрации опорного пучка, благодаря чему ослабляются негауссовы пространственные составляющие опорного пучка.
38. Способ по любому из пп.34-36, дополнительно содержащий этап выполнения очистки пучка путем снабжения одномодовым волокном, формирующим измерительный пучок.
39. Способ по любому из пп.34-36, дополнительно содержащий этап излучения сигнала состояния в ответ на определенный сигнал концентрации.
| HARRIS М | |||
| ЕТ AL: "CONTINUOUS-WAVE BISTATIC LASER DOPPLER WIND SENSOR", APPLIED OPTICS, VOL.40, NO.9, 20.03.2001 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Лидар для зондирования атмосферы | 1977 |
|
SU685021A1 |

