Изобретение относится к средствам для автономного измерения скорости движущихся объектов и может быть использовано для измерения скорости движения автомобилей по дороге.
Для оценки новизны и технического уровня заявленного решения рассмотрим ряд известных заявителю технических средств аналогичного назначения, характеризуемых совокупностью сходных с заявленным изобретением признаков.
Известен доплеровский датчик для наземного транспорта, содержащий блок из двух антенных устройств, излучающий и принимающий сигнал под углами к продольной оси корпуса машины, два блока генератора и детектора, два измерителя частоты и сумматор, см. патент US №3833906, G 01 S 9/44.
Известно устройство для измерения скорости наземного объекта, содержащее первую и вторую антенны, сумматор, блок генератора и детектора и измеритель частоты, см. патент РФ №2052833, G 01 SI 3/58. В данном устройстве применяется метод суммирования сигналов, при котором сигналы, принятые по лучам, суммируются, а затем измеряется доплеровский сдвиг частоты этого суммарного сигнала.
Известен измеритель скорости объекта, который содержит первую и вторую антенны, сумматор, блок генератора и детектора и измеритель частоты, первый и второй модуляторы, режекторный фильтр, анализатор и вычислитель, см. патент РФ №2126544, G 01 S 13/58. В данном устройстве за счет формирования спектрального состава излучаемого сигнала и анализа спектра принятого сигнала вычисляется значение текущей и максимально допустимой скорости объекта, а также формируется сигнал тревоги при ее превышении.
Общим недостатком всех вышеуказанных технических средств является наличие двух разнесенных в пространстве антенн, что не позволяет выполнить измеритель скорости портативным.
Известен измеритель скорости движения объекта, содержащий последовательно соединенные радиолокационный доплеровский датчик, формирователь доплеровского сигнала, обнаружитель замираний, следящий фильтр, первый делитель частоты и блок определения скорости, который содержит первый и второй мультиплексоры, эталонный генератор, второй делитель частоты, счетчик, выходной и дополнительный регистры памяти, формирователь импульсов управления, см. патент РФ №1651675, G 01 S 13/58. Данное устройство ставит задачей повышение точности измерения скорости объекта.
По наибольшему количеству сходных признаков и достигаемому при использовании результату данное техническое решение выбрано в качестве прототипа заявляемого изобретения.
В прототипе применена логическая цифровая схема обработки отраженного сигнала, основанная на счетчиках импульсов и не использующая спектральный анализ данного сигнала.
Современные требования, предъявляемые к измерителям скорости объектов, заключаются в обеспечении быстрого и точного определения скорости удаляющихся или приближающихся объектов, портативности прибора, низком уровне энергопотребления и возможности использования автономных источников питания. Известные устройства аналогичного назначения не удовлетворяют в полной мере всем упомянутым требованиям.
В основу настоящего изобретения положено решение задачи создания конструктивно простого, портативного прибора для быстрого и точного определения скорости объектов, обладающего низким уровнем энергопотребления от автономных источников питания.
Сущность заявляемого изобретения выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением технического результата.
Измеритель скорости движения объекта, содержащий средства для излучения СВЧ-сигнала заданной частоты, приема отраженного от движущегося объекта сигнала, блок обработки информации и блок управления и индикации, характеризуется тем, что средства для излучения СВЧ-сигнала заданной частоты и приема отраженного от движущегося объекта сигнала выполнены в виде приемопередающей антенны, волноводно-турникетного преобразователя, полупроводникового генератора, фазовращателя, смесителя и предварительного усилителя доплеровского сигнала, а блок обработки информации выполнен в виде аналого-цифрового преобразователя и сигнального процессора, при этом первый выход полупроводникового генератора подключен ко входу волноводно-турникетного преобразователя, первый выход которого соединен с приемопередающей антенной, а второй выход - с первым входом смесителя, ко второму входу которого подключен второй выход полупроводникового генератора, а третий выход полупроводникового генератора через фазовращатель подключен к третьему входу смесителя, кроме того, двухканальный выход смесителя соединен с входами предварительного усилителя доплеровского сигнала, выходы которого соединены с входами аналого-цифрового преобразователя, выходы которого соединены с входами сигнального процессора, выходы которого соединены с блоком управления и индикации и входом управления полупроводникового генератора.
В этом заключается совокупность существенных признаков, обеспечивающая получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Кроме этого, заявленное решение имеет ряд признаков, характеризующих изобретение в частных случаях его выполнения, конкретных формах его материального воплощения либо особых условиях его использования, а именно:
- измеритель может быть снабжен нормирующим усилителем, подключенным между предварительным усилитель доплеровского сигнала и аналого-цифровым преобразователем.
Заявителем не выявлены источники, содержащие информацию о технических решениях, совокупности признаков которых совпадают с совокупностью отличительных признаков заявленного изобретения, что позволяет сделать вывод о его соответствии критерию "новизна".
За счет реализации отличительных признаков изобретения (в совокупности с признаками, указанными в ограничительной части формулы) достигаются важные новые свойства объекта. В предложенном техническом решении достигается возможность быстрого и точного определения скорости объектов при помощи портативного прибора с низким уровнем энергопотребления.
Отдельные отличительные признаки заявленного изобретения известны из уровня техники (генераторы, фазовращатели, смесители, аналого-цифровые преобразователи), однако заявителю не известны какие-либо публикации, которые содержали бы сведения о влиянии данных отличительных признаков изобретения на достигаемый технический результат. В связи с этим, по мнению заявителя, можно сделать вывод о соответствии заявляемого технического решения критерию "изобретательский уровень".
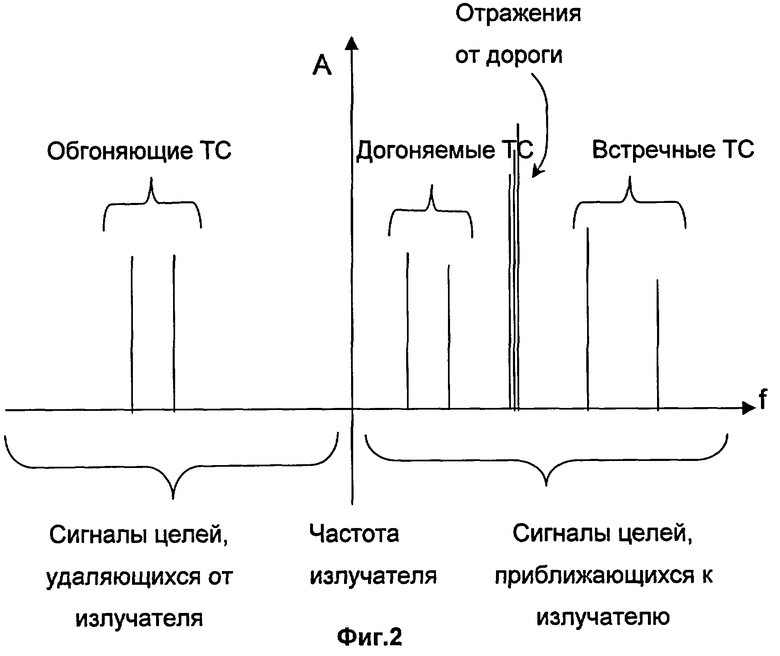
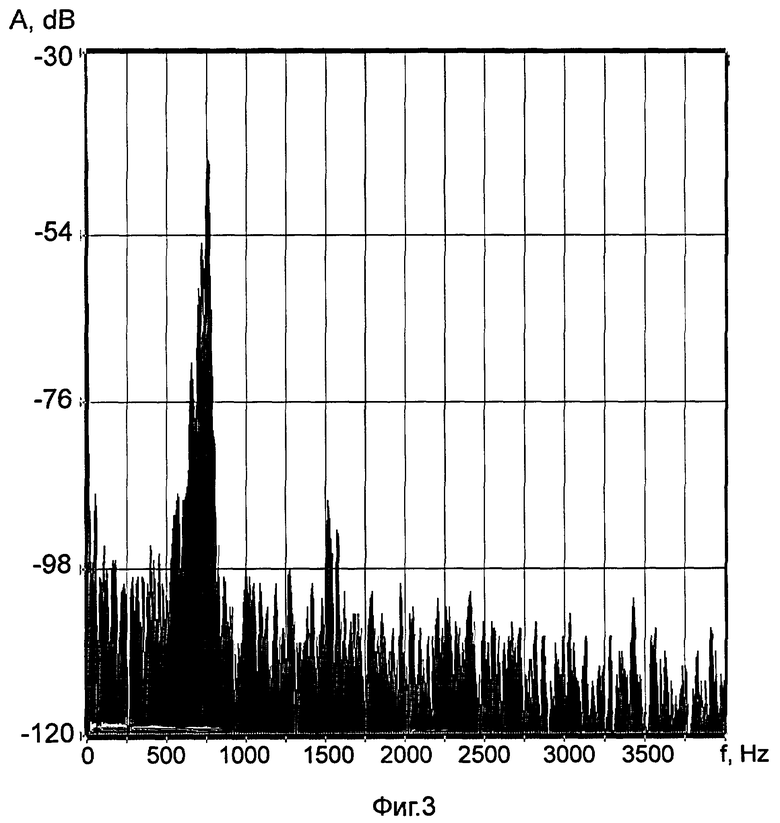
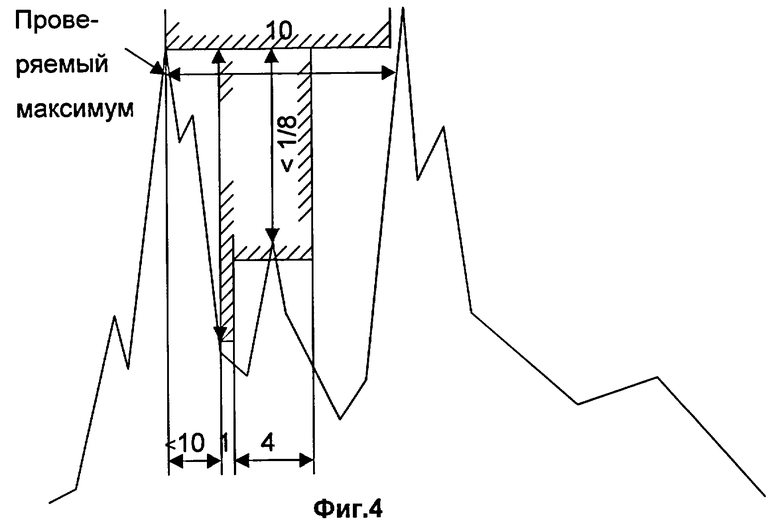
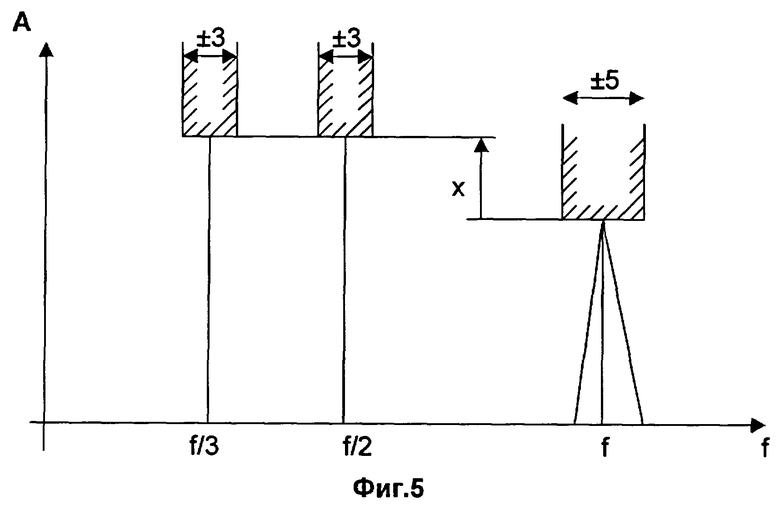
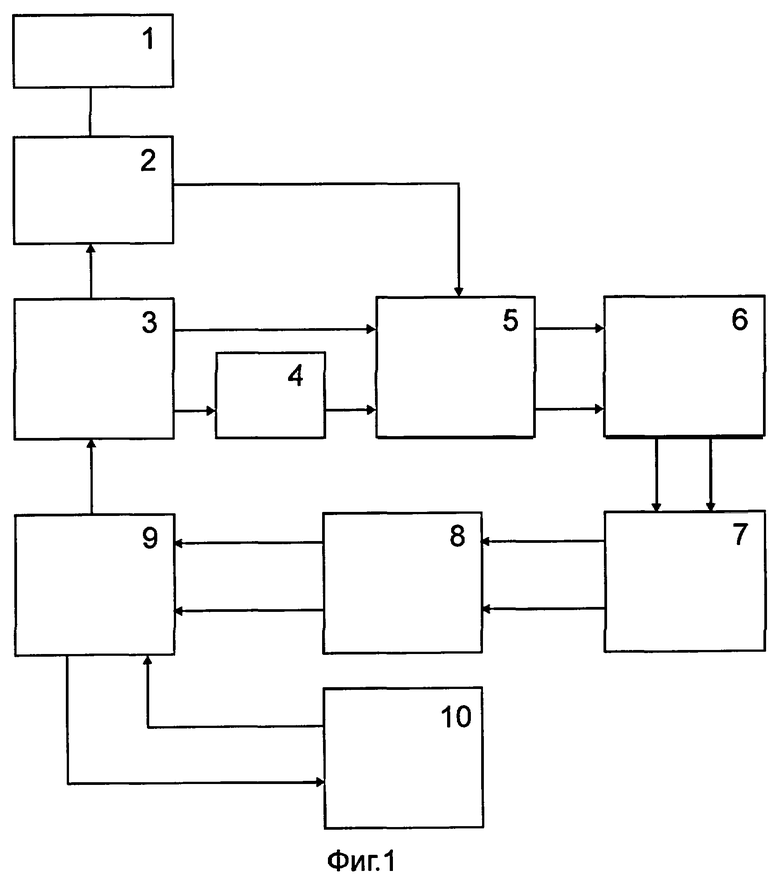
Сущность изобретения поясняется графическими материалами, где на фиг.1 изображена блок-схема заявленного измерителя скорости, на фиг.2 - спектр частот принимаемого СВЧ-сигнала при определении собственной скорости при движении в потоке транспортных средств (ТС) при излучении вперед, на фиг.3 - спектр сигнала дороги, на фиг.4 -диаграмма, иллюстрирующая выполнение условий при поиске сигнала отражения от дороги, на фиг.3 - диаграмма, иллюстрирующая выполнение условий при поиске сигнала отражения от цели.
Измеритель скорости содержит приемопередающую антенну 1, волноводно-турникетный преобразователь 2, полупроводниковый генератор 3, фазовращатель 4, смеситель 5, предварительный усилитель доплеровского сигнала 6, нормирующий усилитель 7, аналого-цифровой преобразователь 8, сигнальный процессор 9, блок управления и индикации 10.
Устройство используют следующим образом.
Сигнал от полупроводникового генератора 3 через волноводно-турникетный преобразователь 2 поступает на приемопередающую антенну 1 и излучается в направлении движения объекта, например автомобиля, скорость которого измеряется. Отраженный от движущегося автомобиля сигнал принимается антенной 1 и через волноводно-турникетный преобразователь 2 поступает на смеситель 5, где начинается его обработка путем выделения низкочастотного сигнала, пропорционального скорости движения автомобиля. Далее в аналого-цифровом преобразователе 8 происходит преобразование двухканального низкочастотного доплеровского сигнала в цифровую форму и передача его в сигнальный процессор 9, где путем расчета и анализа частотного спектра сигнала происходит определение значения скорости объекта.
В блоке управления и индикации 10 происходит сравнивание измеренного значения скорости движущегося объекта с заранее заданным предельным значением скорости, осуществляется выбор режима работы и индикация результатов измерений.
На фиг.2 видно, что сигналы, отраженные обгоняющими ТС, лежат ниже частоты излучения и поэтому могут быть распознаны заявленным измерителем при применении двухканального приема синфазной и квадратурной компонент. Сигналы, отраженные встречными ТС, могут быть распознаны уже после нахождения собственной скорости как лежащие выше нее по частоте. При поиске собственной скорости вверх от собственной частоты излучателя только сигналы догоняемых ТС могут быть приняты за сигнал, отраженный дорогой. Поэтому при работе измерителя в движении необходимо, чтобы уровень сигналов, отраженных догоняемыми ТС, лежал ниже выбранного порога обнаружения сигнала дороги. Сигнал, отраженный от дороги, формируется различными отражателями: неровностями дорожного покрытия, неподвижными предметами (деревья, стоящие ТС, здания, ограждения, столбы), расположенными под различными углами к продольной оси ТС, с которого производятся измерения. Поэтому в спектре сигнала дороги (фиг.3) присутствуют дискретные составляющие, лежащие ниже точного значения собственной скорости. Кроме того, возможны сигналы кратных частот, вызванные множественными отражениями между местными предметами и поверхностью ТС, с которого производятся измерения, но при поиске собственной скорости в направлении роста частоты сигналы кратных частот не создают помех. Эти сигналы могут создавать помехи только при поиске скоростей встречных ТС.
Выше точного значения собственной скорости наблюдается резкий спад спектра, так как наибольшей скоростью приближения обладают отражающие объекты, расположенные в направлении продольной оси ТС, с которого производятся измерения. Поэтому положение спада в спектре всегда соответствует собственной скорости детектора, а положение наибольшего максимума вблизи спада определяется угловым положением наиболее сильно отражающего местного предмета.
При поиске сигнала отражения от дороги посредством алгоритма, задаваемого блоком управления 10 и сигнальным процессором 9, проверяется выполнение следующих условий:
1. В спектре должен быть максимум: квадрат модуля отсчета спектра должен превышать значение квадрата модуля предшествующего и последующего отсчета.
2. Уровень на максимуме должен превышать более чем в 4 раза уровень на зеркальной частоте. Это обеспечивает выделение направления при правильной настройке фазы и уровней синфазного и квадратурного канала приемника.
3. Уровень на максимуме должен превышать установленный порог.
4. На последующих 10 отсчетах спектра после максимума не должно быть отсчетов, превышающих уровень сигнала на максимуме. Это соответствует отсутствию локальных максимумов в спектре отраженного сигнала.
5. На последующих 10 отсчетах должен существовать отсчет с уровнем менее 1/256 от уровня на максимуме. Это соответствует наличию глубокого спада, на котором будет осуществляться поиск точного значения собственной скорости: область поиска находится между найденным максимумом и отсчетом с уровнем менее 1/256 от уровня максимума.
6. После найденного отсчета с уровнем менее 1/256 от уровня максимума не должно быть подъема уровня выше 1/8 от уровня максимума на последующих четырех отсчетах. Этим обеспечивается защита от коротких провалов в спектре и от медленно двигающихся целей.
7. От найденного максимума до найденного отсчета с уровнем менее 1/256 от уровня на максимуме ищется номер отсчета спектра, для которого крутизна спада максимальна. Сравниваемыми значениями являются номера старших значащих битов в двоичном представлении квадратов модуля спектра 32-битными числами. Таким образом, обеспечивается 32 градации уровня для логарифма квадрата модуля спектра и поиск наибольшей крутизны в логарифмическом масштабе.
8. От найденного номера отсчета с наибольшей крутизной спада уровня вычитается число, соответствующее скорости 1 км/ч - 3 отсчета. Этим обеспечивается коррекция смещения точки наибольшей крутизны от точного значения собственной скорости. Величина коррекции найдена экспериментально путем одновременного измерения скорости движения автомобиля установленным на нем измерителем и неподвижным относительно дороги измерителем.
Если при поиске собственной скорости обнаруживается максимум выше установленного порога (выполняются условия 1, 2, 3), но не выполняются условия 4, 5, 6, то результатом измерения будет сигнал "цель не определена".
Алгоритм поиска целей одинаковый для измерения из неподвижного положения и измерения в движении. Меняются только области просмотра спектра сигнала в соответствии с выбранным режимом работы, направлением движения измеряемых целей, найденной собственной скоростью для измерения в движении и найденной скоростью первой (более быстрой) цели при поиске второй цели при измерении из неподвижного положения.
Порог обнаружения целей для измерения из неподвижного положения выбирается в соответствии с кодом команды измерения. Порог для измерения в движении выбирается в соответствии с заданным направлением измерения. После выбора порога проводится его автоматическая коррекция так, чтобы ограничить снизу область просмотра уровнем 1/128 самого мощного сигнала, исключая сигнал отражения от дороги, если измерение проводится в движении.
При поиске сигнала отражения от цели проверяется выполнение следующих условий:
1. В спектре должен быть максимум: квадрат модуля отсчета спектра должен превышать значение квадрата модуля предшествующего и последующего отсчета.
2. Уровень на максимуме должен превышать более чем в 4 раза уровень на зеркальной частоте. Это обеспечивает выделение направления при правильной настройке фазы и уровней синфазного и квадратурного канала приемника.
3. Уровень на максимуме должен превышать установленный порог.
4. На предшествующих 5 отсчетах спектра после максимума не должно быть отсчетов, превышающих уровень сигнала на максимуме.
5. На последующих 5 отсчетах спектра после максимума не должно быть отсчетов, превышающих уровень сигнала на максимуме. Выполнение условий 4 и 5 не позволяет в качестве скорости цели выдать сигналы помех в виде локальных максимумов на склонах максимумов, соответствующих истинным скоростям целей.
6. Проверяется отсутствие сигналов с уровнем, более чем в 100 раз превышающим уровень на максимуме в зоне половинной частоты шириной в 7 отсчетов.
7. Проверяется отсутствие сигналов с уровнем, более чем в 100 раз превышающим уровень на максимуме в зоне 1/3 частоты максимума шириной в 7 отсчетов. Выполнение условий 5 и 6 не позволяет в качестве скорости цели выдать частоты сигналов, обусловленных многократными отражениями (фиг.5).
При измерении из неподвижного положения выполняются следующие действия:
1. Вычисляется порог в соответствии с кодом команды. Для максимальной дальности выставляется в соответствии с настройкой измерителя в стенде на дальность 600...700 м. Для уменьшенных дальностей порог соответственно увеличивается.
2. Выбирается область для поиска в положительных или отрицательных частотах в соответствии с направлением движения измеряемой цели.
3. Ищется глобальный максимум в области от 7 отсчета частоты до 250 км/ч.
4. Если уровень глобального максимума более чем в 128 раз превосходит вычисленный порог, порог заменяется на 1/128 от уровня глобального максимума.
5. Скорость цели №1 ищется в зоне от 250 до 20 км/ч по описанному выше алгоритму определения скорости цели. Просмотр ведется от больших скоростей к меньшим, что обеспечивает выделение наибольшей скорости в потоке транспорта.
6. Если найдена скорость цели №1, то скорость цели №2 ищется в зоне от скорости цели №1 минус 3 км/ч до абсолютных 20 км/ч по тому же алгоритму от больших скоростей к меньшим. Это позволяет найти вторую по величине скорость в потоке транспорта при условии разделения минимум в 3 км/ч от наибольшей.
При измерении в движении выполняются следующие действия:
1. Устанавливается порог для обнаружения отражений от дороги и неподвижных предметов в соответствии с настройкой измерителя в стенде на дальность 130 м.
2. Выбирается область частот, соответствующая приближению к измерителю для поиска сигнала дороги.
3. При наличии в памяти результата прошлого измерения собственной скорости от 35 км/ч до 150 км/ч, установленного специальной командой от управляющего контроллера, осуществляется поиск собственной скорости в зоне +/-5 км/ч от заданного значения по описанному алгоритму определения собственной скорости от меньших скоростей к большим. Это позволяет использовать захват собственной скорости даже при последующем появлении попутных догоняемых целей.
4. При отсутствии собственной скорости в памяти от 35 км/ч до 150 км/ч или при не обнаружении собственной скорости на шаге 3 выполняется поиск собственной скорости от 30 км/ч до 150 км/ч по описанному выше алгоритму от меньших скоростей к большим.
5. При успешном определении собственной скорости осуществляется определение скорости цели заданного направления движения следующими шагами.
6. Вычисляется порог обнаружения целей в соответствии с выбранным направлением измерения. Для приближения устанавливается порог максимальной дальности 600...700 м. Для удаления устанавливается порог в соответствии с настройкой в измерительном стенде на дальность 260 м. Это обеспечивает измерение скоростей только ближайшего транспорта, обгоняющего транспортное средство, с которого производится измерение.
7. Определяется глобальный максимум в области поиска целей в соответствии с выбранным направлением измерения. Для приближения от собственной скорости до собственной скорости плюс 10 км/ч до собственной скорости плюс 250 км/ч. Для удаления от 7 отсчета частоты до 250 км/ч минус собственная скорость.
8. Если уровень глобального максимума более чем в 128 раз превосходит вычисленный порог, порог заменяется на 1/128 от уровня глобального максимума.
9. При измерении на приближение подсчитывается число превышающих порог максимумов, от собственной скорости плюс 40 км/ч до собственной скорости плюс 250 км/ч. При измерении на удаление подсчитывается число превышающих порог максимумов от 10 км/ч до 250 км/ч минус собственная скорость.
10. При превышении числа указанных максимумов 10 скорость цели не определяется. Это позволяет избежать определения сигналов многочисленных отражений между различными целями в качестве скорости цели.
11. При не превышении числом указанных максимумов 10 выполняется определение скорости цели с указанным направлением. Поиск осуществляется по описанному алгоритму определения скорости цели в зонах от собственной скорости плюс 40 км/ч до собственной скорости плюс 250 км/ч при измерении на приближение и 10 км/ч до 250 км/ч минус собственная скорость при измерении на удаление. Поиск осуществляется от больших скоростей к меньшим. Это обеспечивает определение наибольшей скорости в потоке заданного направления.
Возможность промышленного применения заявленного технического решения подтверждается известными и описанными в заявке средствами и методами, с помощью которых возможно осуществление изобретения в том виде, как оно охарактеризовано в любом из пунктов формулы изобретения.
Предложенное устройство может быть изготовлено промышленным способом с использованием известных технологий и технических средств (двухканальный анализатор спектра, процессор обработки сигналов ADSP-2186), что обусловливает, по мнению заявителя, его соответствие критерию “промышленная применимость”.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2835234C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОРСКИХ ЛЕДОВЫХ ПОЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2011 |
|
RU2467347C1 |
| РАДИОФОТОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2834080C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| СПОСОБ ФИКСАЦИИ МОМЕНТА ОТДЕЛЕНИЯ ОТЦЕПА ОТ СОСТАВА И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2023 |
|
RU2815559C1 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
Изобретение относится к средствам для автономного измерения скорости движущихся объектов и может быть использовано для измерения скорости движения автомобилей по дороге. Измеритель скорости движения объекта содержит средства для излучения СВЧ-сигнала заданной частоты и приема отраженного от движущегося объекта сигнала, выполненные в виде приемопередающей антенны, волноводно-турникетного преобразователя, полупроводникового генератора, фазовращателя, смесителя и предварительного усилителя доплеровского сигнала, блок обработки информации, выполненный в виде аналого-цифрового преобразователя и сигнального процессора, при этом первый выход полупроводникового генератора подключен ко входу волноводно-турникетного преобразователя, первый выход которого соединен с приемопередающей антенной, а второй выход - с первым входом смесителя, ко второму входу которого подключен второй выход полупроводникового генератора, а третий выход полупроводникового генератора через фазовращатель подключен к третьему входу смесителя, кроме того, двухканальный выход смесителя соединен с входами предварительного усилителя доплеровского сигнала, выходы которого соединены с входами аналого-цифрового преобразователя, выходы которого соединены с входами сигнального процессора, выход которого соединен с входом управления полупроводникового генератора, при этом сигнальный процессор соединен с блоком управления и индикации, измеритель может быть снабжен нормирующим усилителем, подключенным между предварительным усилителем доплеровского сигнала и аналого-цифровым преобразователем. 1 з.п. ф-лы, 5 ил.
| Измеритель скорости движения объекта | 1989 |
|
SU1651675A1 |
| Устройство для измерения скорости объекта | 1991 |
|
SU1826074A1 |
| RU 98123643 А, 27.10.2000 | |||
| US 4624290, 23.07.2002 | |||
| US 6163756, 19.12.2000. | |||

