Изобретение относится к области железнодорожной (ЖД) автоматики и телемеханики, в частности к способам и устройствам автоматического регулирования скорости движения отцепов на сортировочной горке с целью обеспечения безаварийного роспуска ЖД составов, отображения информации о движении отцепов и их расположении на сортировочной горке в процессе роспуска составов, а также документирования процесса роспуска, и основано на использовании радиолокационных датчиков (РЛД).
В соответствии с концепцией интервально-прицельного регулирования скорости отцепов спускная часть автоматизированных и механизированных сортировочных горок оборудуется тормозными позициями (ТП), которые располагаются, как правило, перед разделительной стрелкой первой ТП, за разделительной стрелкой второй ТП и в начале парковых путей - третьей ТП. Для регулирования скорости отцепов на ТП служат специальные путевые устройства, так называемые горочные и парковые замедлители.
Основной задачей первой и второй ТП, часто называемых горочными или верхними, является торможение свободно скатывающихся отцепов с горба горки. Это необходимо для исключения нагонов попутно скатывающихся отцепов, следующих по заданным маршрутам на пути сортировочного парка. Торможение должно обеспечивать требуемые временные интервалы между скатывающимися с горки вагонными отцепами, достаточные для перевода стрелок по маршруту, и скорости отцепов на выходе из этих позиций, которые при подходе отцепов к третьей ТП не должны превышать 6 м/с. Таким образом, на горочные ТП возлагается главная задача так называемого интервального торможения. В задачи парковой ТП входит прицельное торможение вагонных отцепов и установление скоростей, достаточных для того, чтобы они докатились до расчетной точки на сортировочном пути. При этом скорость соударения отцепов в парке не должна превышать 5 км/ч.
В качестве средств, контролирующих параметры движения отцепов на ТП, служат радиолокационные измерители скорости, принцип действия которых основан на использовании эффекта Доплера (см. стр. 33-40, [1]). Частота 
где





Достоинствами радиолокационных измерителей скорости являются бесконтактность, малая инерционность и непрерывность процесса измерения в зоне контроля. Дальность действия по вагону в условиях прямой видимости радиолокационных измерителей достигает 250 м.
Самыми простыми радиолокационными измерителями скорости являются автодинные устройства (см. рис. 2.1, [1]), в которых функции передатчика зондирующего и приемника отраженного от отцепа излучения одновременно совмещает СВЧ-генератор, называемый в отечественной литературе автодином. Принцип действия этих устройств основан на автодинном эффекте, который состоит в изменениях с частотой Доплера амплитуды и частоты колебаний СВЧ-генератора, а также тока и/или напряжения смещения в цепи его питания [2]. Регистрация указанных изменений в виде автодинных сигналов и их обработка обеспечивают возможность определения параметров относительного перемещения отцепов. Благодаря совмещению функций передатчика и приемника автодинные измерители скорости имеют минимальные габаритные размеры и массу, при этом они обладают достаточно высокой чувствительностью для применения в качестве датчиков скорости отцепов на сортировочной горке [3].
Пример выполнения измерителя скорости на основе автодина (generator mixer) описан в патенте [4]. Измеритель содержит СВЧ-генератор, который связан с приемопередающей антенной через регулируемый трансформатор импедансов (tuner). В цепь питания СВЧ-генератора включен резистор, с которого снимается автодинный сигнал, поступающий в блок обработки сигнала через усилитель.
Более совершенный автодинный датчик, который может использоваться как универсальный прибор определения занятости стрелочного перевода или измеритель скорости вагонов, описан в статье [5]. В случае его использования в качестве датчика занятости он работает в режиме излучения с частотной модуляцией (ЧМ). При этом цифровая обработка сигнальным процессором преобразованного автодином сигнала обеспечивает решение задачи обнаружения свободности или занятости стрелочного перевода. В случае использования датчика как измерителя скорости вагонов программа его работы изменяется. В этом режиме ЧМ излучения отсутствует, и датчик излучает в направлении отцепа немодулированные колебания. Для получения информации о скорости отцепов используются временные и спектральные методы обработки доплеровских сигналов.
Недостатком известных автодинных измерителей скорости является низкий энергетический потенциал по сравнению с измерителями с гомодинным построением приемопередатчика. [6]. Данный параметр ограничивает предельную дальность действия измерителя.
Известны радиолокационные измерители скорости движения вагонов, содержащие «датчик доплеровского сигнала (ДДС)» и блок измерительного преобразователя сигнала (БИПС) [7, 8]. При этом ДДС состоит из передающей и приемной антенны, которые подключены соответственно к СВЧ-генератору и диодному смесителю. Выход диодного смесителя через усилитель сигнала доплеровской частоты подключен к входу БИПС. Доплеровский сигнал в ДДС получают в результате преобразования частоты в диодном смесителе принятого от движущегося отцепа излучения и части опорного излучения СВЧ-генератора, проходящего через щелевое сочленение. Антенны ДДС устанавливают внутри колеи, а остальные устройства - в междупутье.
Известные устройства имеют следующие недостатки.
Связь антенн с СВЧ-генератором и диодным смесителем выполнена с использованием протяженного волноводного тракта. Неизбежно возникающие вибрации этого тракта при прохождении отцепа, в свою очередь, вызывают амплитудно-фазовую модуляцию излучения и являются причиной формирования на выходе диодного смесителя помех, которые нарушают нормальную обработку доплеровского сигнала и ограничивают дальность действия устройства (см. стр. 393-396, [9]).
Установка ДДС внутри колеи также не является удачным решением, поскольку его обслуживание в зимнее время является сложным. Устройство часто выходит из строя, особенно весной и в дождливую погоду, поскольку ДДС заливает водой [10]. Кроме того, наличие двух антенн в измерителе значительно усложняет конструкцию устройства, а также увеличивает его габаритные размеры и стоимость, что является его дополнительным недостатком.
Известны радиолокационные измерители скорости движения вагонов, приемопередатчик которых выполнен по схеме с прямым (гомодинным) преобразованием доплеровского сигнала (см. стр. 33-37, рис. 2.5, [1]; [11]). Эти устройства используют одну антенну, которая работает как на передачу, так и на прием. Непрерывное излучение с выхода СВЧ-генератора, пройдя по пути первый - второй порты циркулятора, поступает в антенну и излучается в направлении движущегося отцепа. Отраженное от отцепа излучение сдвинуто по частоте на величину доплеровского смещения (1), пропорционального скорости движения отцепа. Это излучение через антенну и по пути второй - третий порты циркулятора поступает на одно из плеч смесителя, на другое плечо которого подаются опорные колебания СВЧ-генератора. В результате преобразования частоты колебаний на выходе смесителя выделяется сигнал разностной (доплеровской) частоты, который далее после усиления и предварительной фильтрации поступает в блок обработки сигналов.
Однако упомянутые выше измерители скорости вагонов имеют существенный недостаток, который состоит в следующем.
Характерной особенностью горочных измерителей скорости является то, что они относятся к системам ближней радиолокации (СБРЛ), в которых расстояния между измерителем и вагоном соизмеримо с пространственным разносом сосредоточенных отражающих элементов («блестящих» точек) конструкции вагона [12]. В таких условиях отраженное излучение приобретает множественный характер. Это значительно усложняет структуру отраженного сигнала, в образовании которого решающее значение приобретают не только амплитудные, но и фазовые соотношения между отражениями от различных элементов вагона. Обработка принятого сигнала и извлечение из него информации о параметрах движения отцепа дополнительно осложнены необходимостью учитывать динамику изменения радиолокационной картины. Так при максимальном удалении отцепа от измерителя скорости в основном облучается торцевая стенка вагона. Отражающие элементы на его поверхности сосредоточены сравнительно в узком секторе. По мере приближения отцепа к измерителю изменяется площадь облучаемого участка, а сам участок облучения перемещается на боковую часть вагона (см. рис. 2.4, [1]). В зону облучения попадают крупные, более «яркие» «блестящие» точки, например, вертикальные угловые, промежуточные, шкворневые и дверные стойки, которые образуют уголковые отражатели. Значимыми элементами картины отражений являются автосцепка, элементы поддона, а также более мелкие отражающие элементы - замки, тормозные тяги и пр. Все перечисленные отражающие элементы, находящиеся в поле излучения радиолокационного измерителя, создают совокупность элементарных (парциальных) доплеровских сигналов, полученных от отдельных частей поверхности вагона. При существующих дальностях измерения и малых углах облучения даже небольшие изменения положения отцепа на тормозной позиции приводит к значительным изменениям фазы парциальных сигналов. В результате интерференции парциальных сигналов на выходе приемного устройства (смесителя) наблюдаются перескоки фазы результирующего сигнала, а также его кратковременные и продолжительные пропадания (замирания). Отмеченные особенности формирования сигналов при их обработке не учтены в упомянутых выше измерителях скорости. По этой причине данные устройства не обеспечивали требуемую точность измерения параметров движения отцепов, и были сняты с эксплуатации на сортировочных горках.
В патенте [13] для борьбы с потерей сигнала предложен способ, основанный на поиске значения разности фаз парциальных сигналов при которой замирание сигнала отсутствует. Для этого частоту излучения СВЧ-генератора в процессе формирования сигнала модулируют по пилообразному закону. Затем принимаемый от отцепа сигнал смешивают с излучаемыми колебаниями, преобразуют полученную смесь в смесителе, результат преобразования выпрямляют и в пределах интервала модуляции определяют такой момент времени 



Недостатком предложенного способа является значительное расширение спектра излучения СВЧ-генератора вследствие частотной модуляции. Так, при разности хода лучей парциальных отражений 0,25 м девиация частоты должна быть порядка 300 МГц.
Известны радиолокационные измерители скорости движения отцепов, приемопередатчик которых также выполнен по гомодинной схеме с прямым преобразованием доплеровского сигнала и одной антенной, работающей как на передачу, так и на прием (см. стр. 37-40, рис. 2.7, [1]; [14-22]; стр. 108-116, [23]). Данные измерители отличаются наличием в блоке обработки сигнала технических решений, снижающих влияние на точность измерения глубоких замираний сигнала из-за множественного характера отраженного излучения от вагона.
Устройства, описанные на стр. 37-40, рис. 2.7 книги [1] и в статьях [14-18], содержат измерительный преобразователь сигналов, предназначенный для преобразования частоты доплеровского сигнала в постоянное напряжение. Преобразователь выполнен на основе генератора пилообразных импульсов, который запоминает и поддерживает в течение заданного времени (обычно двух секунд) постоянной частоту выходного сигнала и соответственно величину выходного напряжения преобразователя начиная с момента его пропадания.
Технические решения по восстановлению пропавших импульсов в доплеровском сигнале, предложенные в [19, 20], основаны на применении следящего фильтра, выполненного на основе системы фазовой автоподстройки частоты (ФАПЧ). В случае пропадания сигнала цепь обратной связи ФАПЧ размыкается и генератор управляемый напряжением (ГУН) сохраняет прежнюю частоту сигнала на выходе фильтра в течение установленного времени.
Устройство, выполненное согласно патенту [21], содержат в блоке обработки сигнала две петли слежения за изменением как частоты, так и фазы доплеровского сигнала, выполненные на базе цифрового фазового детектора и цифрового частотного детектора. Устройство также содержит узел селекции длительности пропадания входного сигнала, опорный генератор, узел логической связи и управления. Предложенное устройство позволяет при восстановлении пропавших импульсов уменьшить динамическую погрешность измерения параметров движения отцепов на ТП.
Известны также способ измерения скорости отцепов и радиолокационное устройство, его реализующее, согласно патенту [22]. Приемопередатчик этого устройства работает при непрерывном излучении радиоволн, выполнен по гомодинной схеме с прямым преобразованием доплеровского сигнала и одной антенной. В блоке обработки устройства использованы современные методы цифровой обработки сигналов: дискретное преобразование Фурье (ДПФ), алгоритм Герцеля, весовая обработка входных данных, суммирование входных данных с наложением во времени и «скачущее» ДПФ. Данное изобретение реализовано в радиолокационном измерителе скорости модели РИС-В3М [23].
Из представленного анализа уровня техники следует, что при разработке РЛД, выполненных преимущественно в период до 2000-го года, отдавалось предпочтение более простым и дешевым принципам их построения. В качестве приемопередатчиков использовались гомодинные и автодинные устройства непрерывного излучения без модуляции, а обработка доплеровского сигнала основана на измерении его частоты.
В настоящее время благодаря развитию элементной базы СВЧ микроэлектроники, разработке типовых модулей приемопередающих устройств СВЧ и методов цифровой обработки сигналов указанные ограничения стали несущественными. В связи с этим для реализации РЛД нового поколения востребованными являются такие методы формирования зондирующих и обработки отраженных радиосигналов, которые более полно, используя свойства сигналов и их возможности, обеспечивают повышение технических и эксплуатационных характеристик вновь создаваемых средств измерения.
В качестве прототипа нами принят радиолокационный измеритель скорости РИС-В3М, который на сегодня является наиболее совершенным и широко применяемым на сети сортировочных станций РЖД. Техническое описание его представлено в учебном пособии: Шелухин В.И. Автоматизация и механизация сортировочных горок: Учебник для техникумов и колледжей ж.-д. транспорта. - М.: Маршрут, 2005. - 240 с., (см. стр. 108-116, рис. 3.26, [23]).
РЛД содержит (см. рис. 3.26, [23]) СВЧ приемопередающий блок, усилитель-фильтр и блок обработки сигналов, причем СВЧ приемопередающий блок состоит из антенны, СВЧ-генератора, циркулятора и смесителя, при этом выход СВЧ-генератора подключен к первому порту циркулятора, ко второму порту которого подключена антенна, к третьему порту циркулятора присоединен вход смесителя, а к выходу последнего через усилитель-фильтр и цифро-аналоговой преобразователь (ЦАП) подключен блок обработки сигналов (БОС). БОС содержит кодек, состоящий из последовательно соединенных упомянутого АЦП и цифро-аналогового преобразователя (ЦАП), постоянное запоминающее устройство (ПЗУ), процессор, приемопередатчик интерфейса в стандарте протокола RS-485 для связи по двухпроводной линии с компьютером системы горочной автоматической централизации (ГАЦ), преобразователь напряжение-частота сигнала импульсной последовательности типа меандр, частота которого соответствует частоте принятого доплеровского сигнала. Кроме того, БОС содержит средства контроля работоспособности РЛД.
Согласно описанию [23], в основе принципа действия прототипа лежит способ радиолокационного определения параметров движения отцепов на сортировочной горке, заключающийся в следующем.
Посредством антенны радиолокационного датчика (РЛД), установленного в начале или в конце контролируемого участка ТП, излучают на высоте вагонной автосцепки зондирующее СВЧ-излучение, сформированное в виде карандашной диаграммы направленности, совпадающей по направлению с диагональю контролируемого участка ТП, принимают отраженное СВЧ-излучение от находящихся в пределах диаграммы направленности антенны «блестящих» точек на поверхности движущегося отцепа, смешивают его с частью зондирующего излучения, преобразуя образовавшуюся смесь отраженного и зондирующего излучений в совокупность парциальных сигналов доплеровской частоты от «блестящих» точек на поверхности движущегося отцепа, затем преобразованную совокупность парциальных сигналов направляют в блок обработки сигнала, где по частоте сигнала с учетом угла между направлением излучения и осью ЖД пути контролируемого участка ТП определяют скорость движения отцепа.
Однако у прототипа и известных аналогов имеются общие существенные недостатки, которые состоят в следующем.
Опыт эксплуатации измерителей на сортировочных горках показывает, что длительность пропадания сигнала на выходе приемопередающего блока вследствие интерференционных замираний достигает 40% длительности всей реализации отраженного сигнала на участке контроля ТП. Длительность замираний может существенно превышать как время измерения, так и время нахождения измерителя в режиме памяти, причем наибольшие замирания наблюдаются именно на том участке ТП, на котором необходим контроль скорости. Более того, в режиме торможения отцепов величина отрицательного ускорения достигает 3м/с2 и более. Так, например, в процессе управления замедлителями иногда возникают нестандартные ситуации вплоть до полной остановки отцепа на ТП. В перечисленных условиях измерение скорости отцепа с требуемой точностью весьма затруднено или становится вообще невозможным.
Простейшие схемы восстановления сигнала, например, использующие генератор с «памятью», при пропадании сигнала формируют ограниченную по времени (до 2 с) серию импульсов постоянной частоты. Длительность этой серии, как правило, меньше длительности фактического пропадания сигнала, особенно при малых скоростях движения. Кроме того, не учитывается динамика движения отцепа. Во время интенсивного торможения скорость, т.е. доплеровская частота, изменяется, а схема восстановления сигнала при этом формирует последовательность импульсов постоянной частоты. Сложность точного восстановления сигнала усугубляется также широким диапазоном скоростей и динамикой ее изменения. При малых скоростях движения отцепов требуется большее время восстановления, чем при высоких скоростях.
Из представленного анализа недостатков известных РЛД следует, что путь совершенствования метода восстановления пропадания сигнала (которого фактически нет) малоэффективен, он себя исчерпал. Любой метод, сколько бы он совершенным не был, не может гарантировать точное восстановление сигнала, отражающего реальную динамику движения отцепа на ТП. Поэтому для решения указанной проблемы востребованными являются иные технические решения, направленные, например, на улучшение качества сигнала путем исключения или снижение причин его пропадания.
Другой существенный недостаток известных измерителей параметров движения отцепов состоит в том, что они не обеспечивают получение надежных результатов измерения в условиях одновременного контроля двух отцепов на одной ТП. Дело в том, что технология роспуска вагонов на сортировочных горках, особенно большой мощности, допускает такой интервал попутного следования отцепов, при котором на ТП одновременно могут находиться два отцепа (см. стр. 61-71, [10]). При этом в случае установки одного измерителя на ТП на его вход будут одновременно попадать сигналы, отраженные от двух отцепов. Стремление устранить это явление путем размещения на ТП двух измерителей, работающих на каждый замедлитель, с одной стороны, существенно усложняет алгоритм обработки сигналов в системах управления замедлителями (см. стр. 121-124, [23]). С другой стороны, такое размещение не устраняет в пределах тормозной позиции зоны, в которой оба измерителя будут принимать отраженный от одного отцепа сигнал. Более того, при установке двух измерителей на ТП увеличивается угол облучения движущегося отцепа. При этом в зону действия измерителя могут попадать отцепы, движущиеся по соседним путям. Кроме того, сигнал помехи в виде биений может появиться на выходе смесителей при прямом попадании излучения измерителей с близкими частотами СВЧ-генераторов. Поэтому для решения данной проблемы по нашему мнению востребованными являются не поиск оптимального размещения измерителей на ТП [10; 23], а новых технических решений РЛД, которые ограничивают рабочие зоны измерителей и защищают их от воздействия помех.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в необходимости исключения или значительного уменьшения времени пропадания отраженного сигнала из-за множественного характера его формирования, что востребовано для повышения надежности и точности определения параметров движения отцепов. Кроме того, востребованной является функциональная возможность получения надежных результатов измерений в условиях одновременного нахождения двух отцепов на одной ТП. Отсутствие разрешающей способности по дальности известных измерителей и недостаточная устойчивость к воздействию сигналов, полученных от движущихся транспортных средств по соседним путям, являются их существенными ограничениями, особенно в современных условиях возросших скоростей роспуска составов и сложности сценариев радиолокационной обстановки на сортировочной горке. В связи с этим является актуальной задача снятия отмеченных ограничений.
Для решения указанной проблемы предложен способ радиолокационного определения параметров движения отцепов на сортировочной горке, заключающийся в том, что посредством антенны радиолокационного датчика (РЛД), установленного в начале или конце контролируемого участка ТП, излучают на высоте вагонной автосцепки зондирующие радиоимпульсы СВЧ-излучения в форме карандашной диаграммы направленности, совпадающей по направлению с диагональю контролируемого участка ТП, во время излучения зондирующих радиоимпульсов принимают радиоимпульсы, отраженные от находящихся в пределах диаграммы направленности антенны «блестящих» точек на поверхности движущегося отцепа, смешивают их с частью энергии зондирующих радиоимпульсов излучения, преобразуют перекрывающиеся по времени части этих радиоимпульсов в видеоимпульсы, дискретизируют их по времени и запоминают во множестве моментов времени 






а по полученным значениям разностей 


















где 




где 




где 




где 





где 









где 






где 


где 
Для реализации указанного способа предложено устройство определения параметров движения отцепов на сортировочной горке, содержащий антенну, приемопередающий блок ППБ, импульсный модулятор, программируемый блок синхронизации и управления ПБСУ, аналого-цифровой преобразователь АЦП, а также блок обработки сигналов БОС, причем высокочастотный порт ППБ присоединен к антенне, к первому выводу ППБ подключен выход импульсного модулятора, а к его второму выводу подключен сигнальный вход АЦП, первый вывод ПБСУ подключен к входу импульсного модулятора, его второй вывод через шину команд программирования ШКП связан с БОС, а третий вывод подключен к тактовому входу АЦП, причем выходной порт АЦП связан с первым выводом БОС, при этом:
ППБ выполнен по гомодинной схеме и содержит СВЧ-генератор, смеситель и циркулятор, причем СВЧ-генератор подключен своим высокочастотным портом к первому порту циркулятора, а второй - к антенне, при этом к третьему порту циркулятора подключен вход смесителя, причем вход модуляции СВЧ-генератора и выход смесителя подключены к первому и второму выводам ППБ соответственно;
ППБ выполнен по автодинной схеме на основе подключенного к антенне СВЧ-генератора, содержащего в своей колебательной системе или связанный с ней через передающую линию амплитудный детектор, причем вход модуляции СВЧ-генератора и выход амплитудного детектора подключены к первому и второму выводам ППБ соответственно;
ПБСУ содержит опорный тактовый генератор, подключенный к входам программируемых умножителя ПУЧ и делителя ПДЧ частоты, при этом выход ПДЧ является первым выходом ПБСУ, второй вывод является шиной команд программирования ШКП, выходы ПДЧ и ПУЧ подключены к входам селектора импульсов СИ, выход которого является третьим выводом ПБСУ.
БОС содержит центральный сигнальный процессор ЦСП, который состоит из постоянного ПЗУ и оперативного ОЗУ запоминающих устройств, вычислительного ядра, первого ПП-1 и второго ПП-2 приемопередатчиков данных (взаимные связи внутри ЦСП ввиду их виртуальности показаны условно), а также цифро-аналоговый преобразователь ЦАП, линейный преобразователь напряжение-частота ПН-Ч сигнала типа меандр, каскад инверсии сигнала и парафазный усилитель.
Как следует из сравнения известных и предлагаемых способов и устройств, технический результат решения указанной проблемы достигается за счет применения нового способа формирования зондирующего излучения и обработки отраженного радиосигнала, введения дополнительных блоков и узлов (ИМ и ПБСУ), а также новых связей между блоками и узлами. Предложенные технические решения позволили смесь доплеровских сигналов на выходе ППБ, полученную от «блестящих» точек на поверхности движущегося отцепа, разделить на отдельные независимые парциальные составляющие, которые не подвержены интерференции. Соответственно, этим достигается исключение основного недостатка прототипа и известных аналогов - замирание (пропадание) сигнала. Кроме того, у предлагаемого РЛД появляется новое свойства - возможность раздельного измерения скорости попутно следующих отцепов на разных замедлителях ТП и повышенная устойчивость к помехам от транспортных средств, движущихся по соседним путям.
В результате поиска альтернативных решений в области применения РЛД на ЖД транспорте среди различных источников информации факта использования указанных технических решений не обнаружено (см., например, литературу: [24-26]). В литературе по радиолокации также не найдены источники информации, раскрывающие сущность предлагаемого изобретения (см., например, литературу: [27-29]). На основании изложенного можно утверждать, что предлагаемое техническое решение обладает существенными отличиями от прототипа и соответствует критерию «Новизна».
Данное решение связано с получением новых свойств устройства, которые явным образом не следуют из уровня техники, соответствует критерию «Изобретательский уровень».
Изобретение направлено на улучшение характеристик РЛД для систем управления замедлителями на спускной части сортировочной горки, что необходимо для повышения ее перерабатывающей способности и уменьшения потенциальных убытков от схода вагонов при отказе напольного оборудования. Поэтому такое устройство востребовано на сети ЖД и может выпускаться промышленностью, поскольку для его изготовления требуются обычные радиоэлектронные компоненты. Таким образом, заявляемое изобретение соответствует критерию «Промышленная применимость».
Сущность изобретения поясняется чертежами.
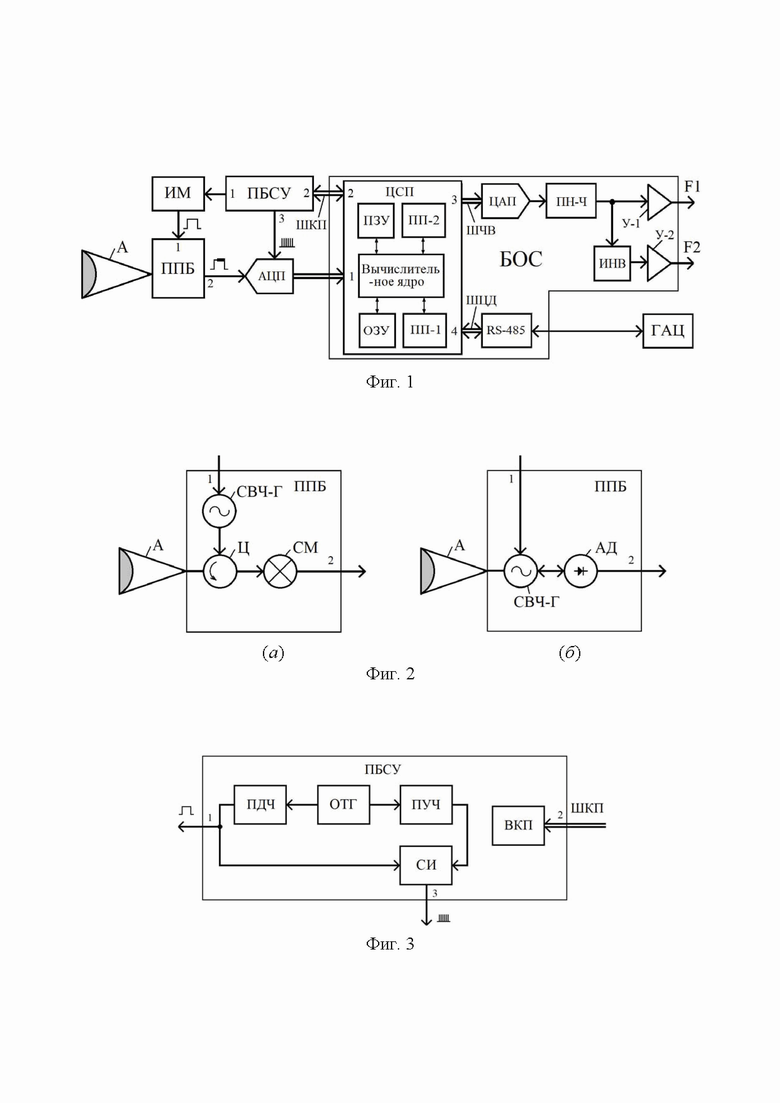
На фиг. 1 представлена структурная схема РЛД, который содержит антенну А, приемопередающий блок ППБ, импульсный модулятор ИМ, программируемый блок синхронизации и управления ПБСУ, аналого-цифровой преобразователь АЦП, блок обработки сигналов БОС, шину команд программирования ШКП, шину частотного выхода ШЧВ, шину цифровых данных ШЦД, цифро-аналоговый преобразователь ЦАП, преобразователь напряжение-частота ПН-Ч, инвертор ИНВ, первый У1 и второй У2 усилители, шинный интерфейс RS-485. Блок обработки сигналов БОС выполнен на основе цифрового сигнального процессора ЦСП, при этом ЦСП содержит постоянное запоминающее устройство ПЗУ, вычислительное ядро и оперативное запоминающее устройство ОЗУ, а также первый и второй приемопередатчики шин последовательного порта ПП-1 и ПП-2. F1 и F2 - парафазные выходы сигнала в виде меандра, частота которого прямо пропорциональна скорости отцепа.
На фиг. 2 приведены гомодинный (а) и автодинный (б) варианты выполнения ППБ, где А - антенна; СВЧ-Г - СВЧ-генератор; Ц - циркулятор; СМ - смеситель; АД - амплитудный детектор.
На фиг. 3 приведен один из вариантов выполнения ПБСУ, содержащего встроенный контроллер программирования ВКП, опорный тактовый генератор ОТГ, программируемые умножитель ПУЧ и делитель ПДЧ частоты, селектор импульсов СИ.
На фиг. 4 приведены временные диаграммы процессов формирования и обработки сигналов в РЛД для определения параметров движения отцепов на сортировочной горке: (а) - выходное напряжение 







РЛД (см. фиг. 1) содержит антенну А, соединенную с приёмопередающим блоком ППБ, программируемый блок синхронизации и управления ПБСУ, подключенный своим первым выводом к входу импульсного модулятора ИМ, выход которого подключен к первому выводу ППБ, а второй вывод ППБ подключен к сигнальному входу аналого-цифрового преобразователя АЦП. Выход АЦП подключен к первому (сигнальному) выводу блока обработки сигналов БОС. При этом второй вывод ПБСУ подключен через шину команд программирования ШКП к второму выводу БОС, а третий вывод ПБСУ подключен к тактовому входу АЦП. Третий вывод БОС подключен к входу цифро-аналогового преобразователя ЦАП, выход которого непосредственно подключен к преобразователю напряжение-частота ПН-Ч, а выход последнего - к входу первого усилителя У1 и через инвертор ИНВ - к входу второго усилителя У2. Четвертый вывод БОС через шину цифровых данных ШЦД, интерфейс в стандарте протокола RS-485 и двухпроводную линию связан с компьютером системы горочной автоматической централизации ГАЦ.
Антенна А (см. фиг. 1) может иметь различные варианты исполнения, например, в виде щелевой или полосковой фазированной решетки, рупорной, диэлектрической, линзовой антенны или рупорно-линзовой (см. стр. 110, рис. 3.26 в [23]; стр. 21, 114, 142, 151, 200 в [30]).
ППБ также имеет альтернативные технические решения. Он может быть выполнен по гомодинной (см фиг. 2,а) или автодинной (см фиг. 2,б) схеме. Первый вариант представлен в описании РИС-В3М пособия [23], принятый в качестве прототипа, при этом оба варианта выполнения СВЧ-модуля описаны в патенте US3750171, 31.07.1973 (см. фиг. 1 и 2).
Пример выполнения ППБ по гомодинной схеме, представленный на фиг. 2,а, содержит СВЧ-генератор СВЧ-Г, смеситель СМ и циркулятор Ц, при этом СВЧ-генератор СВЧ-Г подключен своим высокочастотным портом к первому порту циркулятора Ц, а его второй порт - к антенне А, при этом к третьему порту циркулятора Ц подключен вход смесителя СМ, причем вход модуляции СВЧ-генератора СВЧ-Г и выход смесителя подключены к первому и второму выводам ППБ соответственно (см. стр. 110, рис. 3.26 в [23]). Гомодинные модули ППБ выпускаются промышленностью (см., например, описание доплеровских модулей: «24.125 GHz Ranging Sensor Head, Dual Channel, Short Range», Model SSD-24303-20M-DW на сайте https://www.eravant.com/).
Пример выполнения ППБ по автодинной схеме, представленный на фиг. 2,б, содержит СВЧ-генератор СВЧ-Г, подключенный своим высокочастотным портом к антенне А и к амплитудному детектору АД. Конструктивно обычно детекторный диод амплитудного детектора АД помещается непосредственно в резонатор автодинного СВЧ-генератора СВЧ-Г или в связанную с резонатором передающую линию, как показано на фиг. 2 патента RU2295911С1, опубл. 27.03.2007, бюл. № 9 и на рис. 6а и 9а статьи [2]. Вход модуляции СВЧ-генератора СВЧ-Г и выход амплитудного детектора АД подключены к первому и второму выводам ППБ соответственно.
В состав ППБ могут входить дополнительные элементы, не изменяющие суть изобретения. Например, после смесителя СМ и амплитудного детектора АД могут быть установлены малошумящий усилитель и фильтр сигналов доплеровской частоты, а между СВЧ-генератором СВЧ-Г и первым портом циркулятора Ц - усилитель мощности.
СВЧ-генератор СВЧ-Г, может быть выполнен, например, в виде СВЧ генераторного модуля в объемном или полосковом исполнении на основе транзистора (см. стр. 88, рис. 3.7 книги [31]), на диоде Ганна или лавинно-пролётном диоде в волноводном или полосковом исполнении (см. стр. 194, 195, рис. 4.24 и 4.25, [32]). Частота колебаний СВЧ-генератора СВЧ-Г может быть стабилизирована синтезатором частоты или при помощи дополнительного высокодобротного резонатора, что не меняет сути предлагаемого изобретения.
Импульсный модулятор ИМ предназначен для формирования импульсного воздействия на СВЧ-генератор СВЧ-Г, при котором в течение этого импульса в СВЧ-генераторе СВЧ-Г возбуждаются СВЧ-колебания. Примеры схемных решений импульсных модуляторов ИМ по цепи питания для СВЧ-генераторов СВЧ-Г, выполненных на диодах Ганна, лавинно-пролетных диодах или транзисторах широко известны (см. рис. 15а, рис. 22а статьи [2]).
ПБСУ может быть выполнен на базе «жесткой» логики, ПЛИС или с применением специализированных микросхем. Один из вариантов реализации ПБСУ (см. фиг. 3), выполненного на микросхеме Si5368, содержит встроенный контроллер программирования ВКП, опорный тактовый генератор ОТГ, подключенный к входам программируемых умножителя частоты ПУЧ и делителя частоты ПДЧ, а также селектор импульсов СИ. При этом выход ПДЧ подключен к первому входу СИ и является первым выводом ПБСУ, а выход ПУЧ подключен ко второму входу СИ, при этом выход СИ является третьим выводом ПБСУ. Данная микросхема отличается низким уровнем дрожания фазы выходных колебаний в диапазоне частот от 2 кГц до 1,4 ГГц (см. сайт фирмы Silicon Laboratories: http://www.silabs.com).
В качестве АЦП предпочтительно использование быстродействующих микросхем [33; 34]. Например, микросхема AD9689 фирмы «Analog Devices» представляет собой двойной 14-разрядный АЦП с интерфейсом JESD204B, быстродействием 2,6 Гбайт/с (см. сайт: https://www.analog.com/ru/products/ ad9689.html#product-overview). Этот АЦП способен осуществлять прямую выборку аналоговых сигналов с шириной полосы пропускания по уровню -3 дБ до 9 ГГц. Аналогичные АЦП типа DAC38RF82 и DAC38RF89 выпускаются фирмой Texas Instruments (см. сайт https://www.ti.com/).
БОС (см. фиг. 1) выполняет одновременно функции формирования команд программирования ПБСУ, обработки сигналов, преобразования частоты доплеровского сигнала в цифровой код и обмена цифровыми данными с ГАЦ. Он может быть реализован на основе микросхемы сигнального процессора, например, типа TMS320F2808 фирмы Texas Instrument [35]. В состав ЦСП входят блоки, выполняющие следующие функции: универсальный асинхронный приемопередатчик шины первого порта ПП-1, который осуществляет обмен информацией с компьютером системы ГАЦ посредством интерфейса RS-485; приемопередатчик шины второго последовательного порта ПП-2; постоянное запоминающее устройство (ПЗУ), хранящее программу обработки сигналов, управления и константы, необходимые для обработки сигналов; высокоскоростное вычислительное ядро, выполняющее все функции цифровой обработки сигнала (спектральный анализ, цифровую фильтрацию сигнала и формирование данных для формирования частотного выхода РЛД и отображения информации); оперативное запоминающее устройство (ОЗУ), выполняющее функции запоминания текущих значений и результатов отработки сигналов.
Цифро-аналоговый преобразователь (ЦАП) блока обработки сигнала БОС предназначен для преобразования последовательности цифровых данных о скорости отцепа, поступающих с третьего порта ЦСП, в напряжение. Принципы построения ЦАП широко известны, причем промышленностью выпускается широкая номенклатура микросхем ЦАП (см., например, [36]).
Преобразователь напряжение-частота ПН-Ч, предназначенный для преобразования выходного напряжения ЦАП в аналоговый импульсный сигнал типа меандр, частота которого прямо пропорциональна скорости отцепа. ПН-Ч может быть выполнен на микросхеме AD654JN, выпускаемой фирмой Analog Devices (см. сайт: www.analog.com).
Инвертор ИНВ, первый У1 и второй У2 усилители предназначены для получения из униполярного импульсного сигнала на выходе преобразователя напряжение-частота ПН-Ч двух противофазных меандров F1 и F2. Данные узлы могут быть выполнены на операционных усилителях (см. стр. 110, рис. 3.26, [23]; рис. 2.1, рис. 2.2, стр. 31-33, [37]).
РЛД для определения параметров движения отцепов на сортировочной горке работает следующим образом.
После подачи на РЛД напряжения от источника питания (на фиг. 1 не показан) в ЦСП БОС вычислительным ядром в соответствие с подпрограммой «Установка» [35] производится сначала настройка периферийных устройств, распределение внутренней памяти, установка значений внутренних переменных, копирование исполняемого кода команд из ПЗУ с низкой производительностью в высокопроизводительное ОЗУ и подача команды «Выборка из АЦП и сохранение результатов в памяти», по которой ЦСП переходит в режим готовности приема оцифрованных сигналов от АЦП с последующим формированием массива данных в памяти ОЗУ. После ее завершения через второй порт ЦСП БОС производится выдача на ПБСУ последовательности команд программирования его параметров.
В ПБСУ (см. фиг. 3) после подачи напряжения питания и приема от БОС последовательности команд программирования происходит запуск опорного тактового генератора ОТГ. Выходной сигнал этого генератора поступает на программируемый умножитель частоты ПУМ, на выходе которого формируются тактовые импульсы с периодом повторения 


где 



Импульсы запуска передатчика ППБ с первого вывода ПБСУ 








В антенне А СВЧ-колебания преобразуются в электромагнитное излучение, которое в соответствие с диаграммой направленности антенны А излучается в контролируемое пространство ТП.
Необходимо отметить, что при гомодинном выполнении ППБ (см. фиг. 2,а) часть мощности радиосигнала СВЧ-генератора СВЧ-Г по пути первый порт - третий порт циркулятора Ц проникает на порт смесителя СМ в качестве гетеродинного колебания. Эти колебания назовем «прямыми» (индекс «прм») 

где


Если в контролируемом пространстве ТП находится отцеп, то от «блестящих» точек на его поверхности возникают парциальные отражения ЭМ излучения, которые принимаются антенной А и преобразуются в СВЧ-колебания парциальных радиосигналов. При гомодинном исполнении ППБ (см. фиг. 2,а) эти радиосигналы проходят через циркулятор Ц по пути второй порт - третий порт и поступают на порт смесителя СМ. При автодинном исполнении ППБ (см. фиг. 2,б) принятые парциальные радиосигналы сразу поступают на порт СВЧ-генератора СВЧ-Г. Выражение для радиосигнала 

где















На диаграммах в и г фиг. 4 представлены временные диаграммы сигналов для случая наличия в поле излучения антенны А двух «блестящих» точек на поверхности отцепа (


При гомодинном исполнении ППБ (см. фиг. 2,а) в результате нелинейного взаимодействия прямых (2) и отраженных (3) колебаний в смесителе СМ происходит преобразование парциальных радиосигналов в область низких (доплеровских) частот. При этом на выходе смесителя СМ преобразованные сигналы 
При автодинном исполнении ППБ (см. фиг. 2,б) принятые парциальные радиосигналы (3), смешиваясь с собственными колебаниями (1), вызывают в СВЧ-генераторе СВЧ-Г автодинный эффект [6], состоящий в автодинных изменениях частоты и амплитуды колебаний, а также среднего значения тока и/или напряжения в цепи питания СВЧ-генератора СВЧ-Г. Эти изменения, практически эквивалентные преобразованию радиосигнала в смесителе СМ 

где





Отметим, что начальная фаза 


Первое слагаемое в (4), представляющее результат преобразования отраженного радиосигнала в смесителе СМ или автодинном СВЧ-генераторе СВЧ-Г, содержит информацию о дальности до «блестящих» точек на поверхности отцепа и скорости их движения относительно РЛД. При этом для реально существующих скоростей движения отцепа справедливо условие, что за время
Таким образом, отраженные сигналы от «блестящих» точек, которые находятся ближе, чем последующие элементы на поверхности отцепа, вызывают изменения высоты видеоимпульсов на выходе смесителя или автодина от момента времени прихода отраженного излучения 


Второе слагаемое 
Третье слагаемое в (4) обусловлено детектированием прямого сигнала СВЧ-генератора СВЧ-Г, воздействующего на вход смесителя СМ, или собственных колебаний автодинного СВЧ-генератора СВЧ-Г. Поэтому на выходе этих устройств видеоимпульсы, полученные в результате приема отраженных радиосигналов, располагаются на некотором «паразитном» пьедестале (см. диаграмму д на фигуре 4).
С выхода приемопередающего блока ППБ (см. фиг. 1) видеоимпульсы далее поступают на сигнальный вход АЦП, где выполняется сначала операция дискретизации сигнала (4) по времени. Затем во время действия тактовых импульсов 


где

Последовательности оцифрованных для каждого 



Полученный в результате вычитания (6) массив данных 

где


В результате выполнения операции вычитания в полученных значениях 


Шумовая составляющая 



По полученным значениям разностей 






Далее для полученных амплитуд 


После этого вычислительным ядром ЦСП из множества значений 






где



Далее вычислительным ядром ЦСП БОС выполняется расчет текущего расстояния
где





Полученные значения расстояний

Используя данные массива (12), вычислительным ядром ЦСП находятся текущие положения «блестящих» точек на отцепе относительно линии отсчета - перпендикуляра с места установки РЛД на рельсовый путь:
где
После этого вычислительным ядром ЦСП из множества значений текущих расстояний
где
Сигналы, неудовлетворяющие условию (14), в число которых входят также помехи от транспортных средств, движущихся по соседним путям, игнорируются в дальнейшей обработке и исключаются из ОЗУ ЦСП. Выполнение неравенства (14) означает наличие отцепа на контролируемом участке ТП. Для «блестящих» точек, удовлетворяющих этому неравенству, из массива данных (10) для частот
где
Одновременно с обнаружением наличия отцепа на контролируемом участке ТП в память ОЗУ ЦСП вносятся данные идентификационного номера контролируемого отцепа, полученные от компьютера при работе РЛД в системе ГАЦ, или внесенные вручную оператором при автономной работе РЛД. Кроме того, в память ОЗУ ЦСП автоматически вносятся данные текущего времени системы единого времени ГАЦ или от встроенного в ЦСП БОС таймера.
По полученным значениям доплеровских частот 

где






По полученным значениям путевой скорости 



Результаты вычисления скорости
где
Численное интегрирование (18) может выполняться различными методами. Например, методом прямоугольников, трапеций, парабол (метод Симпсона) или других. Полученный итог вычисления длины
Далее, используя сглаженные значения массива данных скорости

где
Минимальное значение измерительного интервала времени 
Результаты вычисления текущих значений скорости
Кроме того, текущие значения скорости
Необходимо отметить, что возможность автоматического самоконтроля работоспособности РЛД, предусмотренная в прототипе, не является предметом настоящего изобретения. Эта функция может быть также реализована в предлагаемом устройстве.
Таким образом, предложенные технические решения позволили смесь доплеровских сигналов на выходе ППБ, полученную от «блестящих» точек на поверхности движущегося отцепа, разделить на отдельные независимые парциальные сигналы от точечных отражателей. Этим достигается исключение основного недостатка прототипа и известных аналогов - замирания (пропадания) сигналов, что повышает точность определения параметров движения отцепов, а также избавляет от необходимости применения в РЛД сложных восстановителей пропадания сигналов и алгоритмов их обработки.
Обработка отдельных парциальных сигналов обеспечивает возможность раздельного определения относительного расположения «блестящих» точек на поверхности отцепа и их путевой скорости перемещения. Поскольку «блестящие» точки находятся на поверхности одного и того же отцепа, то применение к полученным значениям операции усреднения дополнительно повышает точность определения параметров движения отцепа.
Кроме того, у предлагаемого РЛД, благодаря селекции отцепов по дальности, появились новые свойства. Это возможность раздельного измерения скорости попутно следующих отцепов на разных замедлителях и повышенная устойчивость к помехам от транспортных средств, движущихся по соседним путям. Данные свойства получены благодаря выбору сигналов для обработки тех «блестящих» точек, которые находятся в пределах лишь контролируемого участка пути ТП.
Ограниченность зоны контроля с помощью РЛД позволяет решать задачу автономного обнаружения отцепов на ТП без использования рельсовых цепей или датчиков счета осей. Кроме измерения скорости движения отцепов на ТП, предлагаемое устройство обеспечивает возможность определения протяженности отцепов и их ускорение. С учетом известных данных о длине вагонов имеется возможность контроля числа вагонов в отцепах. Указанное расширение функциональных возможностей заявленного устройства обеспечивает его дополнительные преимущества по отношению к прототипу и аналогам.
Литература
1. Григорин-Рябов В.В., Вериго В.М., Шелухин О.И., Шелухин В.И. Радиотехнические железнодорожные устройства. - М.: Транспорт, 1986. - 161 с.
2. Носков В.Я., Смольский С.М., Игнатков К.А. и др. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов // Успехи современной радиоэлектроники. 2019. № 2. С. 5-33.
3. Носков В.Я., Игнатков К.А. Применение стабилизированного двухдиодного автодина в радиолокационном датчике для сортировочных горок // 22-я Международная Крымская конференция «СВЧ-техника и телекоммуникационные технологии» (КрыМиКо’2012). Севастополь, 2012. С. 893-896.
4. Патент US3710385, опубл. 09.01.1973. Vehicle initial speed and stopping distance indicator / Howard et al.
5. Єрмак Г.П., Варавiн А.В., Попов I.В., Васильєв О.С., Усов Л.С. Радiолокацiйний датчик контролю наявностi i швидкостi рухомого складу на територiях сортувальних гiрок // Наука та інновації. 2009. Т. 5. № 5. С. 9-16 (укр). (Ермак Г.П., Варавин А.В., Попов И.В., Васильев А.С., Усов Л.С. Радиолокационный датчик контроля наличия и скорости подвижного состава на территориях сортировочных горок // Наука и инновации. 2009. Т. 5. № 5. С. 9-16) Доступ в Интернет по адресу: http://dspace.nbuv.gov.ua/xmlui/handle/123456789/ 27893.
6. Носков В.Я., Смольский С.М., Игнатков К.А., Мишин Д.Я., Чупахин А.П. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 10. Основы анализа и расчёта параметров автодинов с учётом шумов // Успехи современной радиоэлектроники. 2018. № 3. С. 18-52.
7. Уманский Г.М. Электронный измеритель скорости ЭС-ЦНИИ // Автоматика, телемеханика и связь. 1962. № 5. С. 13-19.
8. Авт. свид. SU305414, опубл. 04.06.1971. МПК G01P3/42. Радиолокационный измеритель скорости движения вагонов / Ю.В. Ваванов и др.
9. Григорин-Рябов В.В. (ред). Радиолокационные устройства (теория и принципы построения). М.: Советское радио, 1970. - 680 с.
10. Шелухин В.И. Датчики измерения и контроля устройств железнодорожного транспорта. - М.: Транспорт, 1990. - 119 с.
11. Ефимов Л.Л., Кронов В.И., Прудовский И.И. Доплеровский измеритель скорости ДИС-74. Автоматика, телемеханика и связь. 1980. № 4. С. 21-22.
12. Коган И.М. Ближняя радиолокация (теоретические основы). - М.: Сов. радио, 1973. - 272 с.
13. Патент ФРГ DE2126663, опубл. 07.12.1971. МПК B61K7/12, G01S9/44, G01S13/583(EP). Verfahren zum Ermitteln der Geschwindigkeit von Fahrzeugen / Grafinger
14. Авт. свид. SU410314, опубл. 05.01.1974, бюл. № 1. МПК G01P3/42. Измерительный преобразователь сигналов / Б.Т. Анашкин, Л.Л. Ефимов.
15. Ваванов Ю.В., Вериго А.М., Дагаева Н.Х., Перегонов С.А., Кернов Ю.П. Радиолокационный измеритель скорости движения отцепов для сортировочных горок // Автоматика, телемеханика и связь. 1977. № 9. С. 3-5.
16. Радиолокационный измеритель скорости железнодорожных вагонов на сортировочной горке / Ю.Н. Кузнецов, Л.Ф. Михайлов, В.А. Парилов и др. // Электронная техника. Сер. Электроника СВЧ. 1982. № 7. С. 56-58.
17. Вериго А.М., Ваванов Ю.В., Тенн Ф.А., Подоров Н.А. Радиолокационный измеритель скорости движения вагонов // Автоматика, телемеханика и связь. 1983. № 3. С. 7-9.
18. Авт. свид. SU1437284А1, опубл. 15.11.1988, бюл. № 42. МПК4 B61L17/00. Устройство для измерения ускорения движения отцепов на сортировочной горке / В.И. Шелухин, О.И. Шелухин.
19. Патент США US4172256, опубл. 23.10.1979. МПК G01S13/92 (EP), G01S9/44. Circuit for speed measurement of vehicles according to the Doppler-radar principle / Pacozzi.
20. Шелухин В.И., Колесниченко Н.Н., Пыжьянов В.Г. Модифицированный радиолокационный измеритель скорости отцепов // Автоматика, телемеханика и связь. 1988. № 8. С. 8-10.
21. Патент RU2003543С1, опубл. 30.11.1993, бюл. № 43-44. МПК5 B61L17/00. Устройство для измерения параметров движения отцепов на сортировочной горке / В.И. Шелухин и др.
22. Патент RU2229404С2, опубл. 27.05.2004, бюл. № 15. МПК7 B61L17/00. Способ измерения скорости движения отцепов на сортировочной горке и устройство, его реализующее / П.В. Чернов, В.В. Чекурсков и др.
23. Шелухин В.И. Автоматизация и механизация сортировочных горок: Учебник для техникумов и колледжей ж.-д. транспорта. - М.: Маршрут, 2005. - 240 с.
24. Комаров В.М., Заличев Н.Н., Воротников В.Н. Системы предупреждения столкновений наземных транспортных средств / Зарубежная радиоэлектроника. 1981. № 4. С. 54-72.
25. Шелухин В.И., Шелухин О.И. Многофункциональный горочный датчик параметров движения // Автоматика, телемеханика и связь. 1991. № 4. С. 10-14.
26. Марюхненко В.С. Радиолокационные системы на железнодорожном транспорте. Перспективы применения. - Иркутск: ИрГУПС, 2017. - 146 с.
27. Шелухин О.В. Радиосистемы ближнего действия. - М.: Радио и связь, 1989. - 240 с.
28. Справочник по радиолокации / Под ред. М.И. Сколника. В 2 книгах. Книга 1. Москва: Техносфера, 2014.
29. Костенко А.А., Хлопов Г.И. Когерентные системы ближней и сверхближней радиолокации миллиметрового диапазона. - Харьков: ИПЦ «Контраст», 2015. - 352 с.
30. Воскресенский Д.И. Антенны и устройства СВЧ. Расчет и проектирование антенных решеток и их излучающих элементов. - М.: Советское радио, 1972. - 162 с.
31. Баранов А.В., Кревский М.А. Транзисторные генераторы гармонических СВЧ колебаний. - М.: Горячая линия - Телеком, 2021. - 276 с.
32. Малышев В.А. Бортовые активные устройства сверхвысоких частот. - Л.: Судостроение, 1990, 264 с.
33. Грушвицкнй Р.И., Мурсаев А.X., Угрюмое Е.П. Проектирование систем на микросхемах программируемой логики. - СПб.: БХВ-Петербург, 2002.
34. Гузик В.Ф., Каляев И.А., Левин И.И. Реконфигурируемые вычислительные системы. Ростов-на-Дону: Издательство Южного федерального университета, 2016.
35. «Руководство пользователя: Семейство микроконтроллеров MSP430Х1ХХ». Пер. с англ. М.: ЗАО «Компэл», 2004.
36. Лебедев О.Н., Марцинкявичюс А.-Й.К., Багданскис Э.-А.К. и др. Микросхемы памяти, ЦАП и АЦП: Справочник. - М.: КУбК, 1996. 384 с.
37. Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. - К.: Техника, 1983, 213 с.
38. Носков В.Я., Богатырев Е.В., Игнатков К.А.. Принцип построения бортового радиолокационного датчика для обнаружения быстродвижущихся целей. Успехи современной радиоэлектроники. 2019. № 12. С. 16-22.
39. Носков В.Я., Смольский С.М. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 6. Исследования радиоимпульсных автодинов. Успехи современной радиоэлектроники. 2009. № 6. С. 3-51.
40. Шелухин В.И. Измерение ускорения железнодорожных транспортных средств // Автоматика, телемеханика и связь. 1987. № 1. С. 13-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| СПОСОБ ФИКСАЦИИ МОМЕНТА ОТДЕЛЕНИЯ ОТЦЕПА ОТ СОСТАВА И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2023 |
|
RU2815559C1 |
| РАДИОФОТОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2834080C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2835234C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ СТРЕЛОЧНОГО ПЕРЕВОДА СОРТИРОВОЧНОЙ ГОРКИ И ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2022 |
|
RU2792315C1 |

Изобретение относится к средствам автоматического регулирования скорости движения отцепов на сортировочной горке. Устройство включает антенну, приемопередающий блок ППБ, импульсный модулятор, программируемый блок синхронизации и управления ПБСУ, аналого-цифровой преобразователь АЦП, а также блок обработки сигналов БОС. Причем высокочастотный порт ППБ присоединен к антенне, к первому выводу ППБ подключен выход импульсного модулятора, а к его второму выводу подключен сигнальный вход АЦП, первый вывод ПБСУ подключен к входу импульсного модулятора, его второй вывод через шину команд программирования ШКП связан с БОС, а третий вывод подключен к тактовому входу АЦП, причем выходной порт АЦП связан с первым выводом БОС. Достигается повышение надежности и точности определения параметров движения отцепов в условиях одновременного нахождения двух отцепов на одной тормозной позиции. 2 н. и 7 з. п. ф-лы, 1 ил.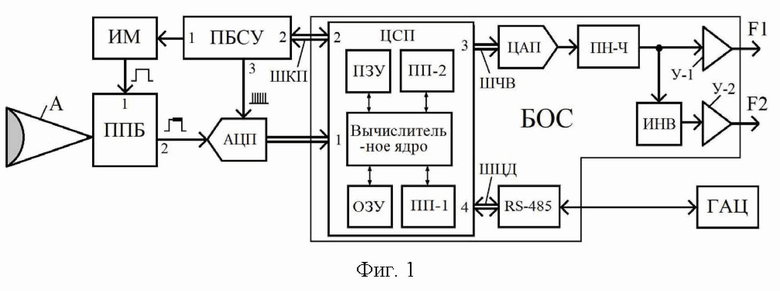
1. Способ радиолокационного определения параметров движения отцепов на сортировочной горке, заключающийся в том, что посредством антенны радиолокационного датчика (РЛД), установленного в начале или конце контролируемого участка тормозной позиции (ТП), излучают на высоте вагонной автосцепки зондирующее СВЧ-излучение в форме карандашной диаграммы направленности, совпадающей по направлению с диагональю контролируемого участка ТП, принимают отраженное излучение от находящихся в пределах диаграммы направленности антенны «блестящих» точек на поверхности движущегося отцепа, смешивают их с частью энергии зондирующего излучения, преобразуя образовавшуюся смесь отраженного и зондирующего излучений, отличающийся тем, что зондирующее СВЧ-излучение формируют в виде радиоимпульсов, при этом отраженное от «блестящих» точек излучение в виде радиоимпульсов принимают и смешивают с частью энергии излучения зондирующих радиоимпульсов, преобразуя перекрывающиеся по времени части этих радиоимпульсов в видеоимпульсы, дискретизируют полученные видеоимпульсы по времени и запоминают во множестве моментов времени 





а по полученным значениям разностей 

















где 




где 




где 




где 





где 











где 


2. Способ по п. 1, отличающийся тем, что СВЧ-излучение РЛД формируют в виде периодических радиоимпульсов, длительность 

где 
3. Способ по пп. 1 и 2, отличающийся тем, что видеоимпульсы преобразованного сигнала разделяют по признаку времени запаздывания отраженного излучения от отдельных «блестящих» точек на поверхности отцепа, находящихся в пределах контролируемого участка ТП.
4. Способ по пп. 1 – 3, отличающийся тем, что спектр отраженного сигнала получают путем выполнения над массивом данных преобразованного сигнала операции быстрого преобразования Фурье по алгоритму «Radix2» с применением оконной функции Хеннинга.
5. Способ по пп. 1 – 4, отличающийся тем, что значения путевой скорости
6. Устройство определения параметров движения отцепов на сортировочной горке, содержащее последовательно соединенные антенну, приемопередающий блок (ППБ), аналого-цифровой преобразователь (АЦП) и блок обработки сигналов (БОС), отличающееся тем, что в него дополнительно введены импульсный модулятор и программируемый блок синхронизации и управления (ПБСУ), причем к первому выводу ППБ подключен выход импульсного модулятора, а к его второму выводу подключен сигнальный вход АЦП, первый вывод ПБСУ подключен к входу импульсного модулятора, его второй вывод через шину команд программирования ШКП связан с БОС, а третий вывод подключен к тактовому входу АЦП.
7. Устройство по п. 6, отличающееся тем, что ППБ выполнен по гомодинной схеме и содержит СВЧ-генератор, смеситель и циркулятор, при этом СВЧ-генератор подключен своим высокочастотным портом к первому порту циркулятора, а второй – к антенне, при этом к третьему порту циркулятора подключен вход смесителя, причем вход модуляции СВЧ-генератора и выход смесителя подключены к первому и второму выводам ППБ соответственно.
8. Устройство по п. 6, отличающееся тем, что ППБ выполнен по автодинной схеме на основе подключенного к антенне СВЧ-генератора, содержащего в своей колебательной системе или связанный с ней через передающую линию амплитудный детектор, причем вход модуляции СВЧ-генератора и выход амплитудного детектора подключены к первому и второму выводам ППБ соответственно.
9. Устройство по любому из пп. 6 – 8, отличающееся тем, что ПБСУ содержит опорный тактовый генератор, подключенный к входам программируемых умножителя и делителя частоты, при этом выход программируемого делителя частоты является первым выходом ПБСУ, второй вывод является шиной команд программирования, выходы программируемых делителя и умножителя частоты подключены к входам селектора импульсов, выход которого является третьим выводом ПБСУ.
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| Ермак Г | |||
| П., Варавин А | |||
| В., Попов И | |||
| B., Васильев А | |||
| С., Усов Л | |||
| С | |||
| Радиолокационный датчик контроля наличия и скорости подвижного состава на территориях сортировочных горок // Наука и инновации | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| С | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| RU 2003543 C1, 30.11.1993 | |||
| 0 |
|
SU163371A1 | |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |

